磁通门传感器研究现状及其在海洋领域的应用
2021-03-08 14:43陈正想胡光兰齐侃侃
数字海洋与水下攻防 2021年1期
陈正想,胡光兰,吕 冰,齐侃侃
(1.中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003;2.国防科技工业弱磁一级计量站,湖北 宜昌 443003)
0 引言
磁场的测量可能是人类最早开展的计量活动。东汉学者王充在《论衡》中写道“司南之杓,投之于地,其柢指南”,可见司南是最早的罗盘,也可说是最早的磁场方向测量传感器。在宋代,磁罗盘的应用促进了古代中国航海事业的发展,为海上丝绸之路做出了重要贡献。真正意义上的磁强计则是由德国天才数学家高斯在哥廷根大学发明的,从那时起,磁场的量化和随时间的变化才被人们理解[1]。现如今,各种磁场测量方法层出不穷,有的磁传感器测量范围达到了9个数量级。特别是磁通门传感器,从1936年发表第1篇文献开始[2],80年来相关研究一直在进行,磁通门传感器的综合性能不断提升,在准静态和缓慢变动的矢量磁场测量方面,后崛起的量子磁力仪仍旧无法撼动其优势地位。随着新材料和电子学技术的发展,磁通门传感器性能仍具有进一步突破的潜力。
1 磁通门传感器探头
1.1 磁芯材料的磁噪声
灵敏度是磁通门传感器最重要的指标之一,该指标取决于磁芯材料的磁噪声水平。通过对磁噪声水平特性的研究,人们总结出了以下磁噪声谱密度半经验公式[3]:

式中:b0是一个与频率无关的数值;f0是转折频率,其数值约为 1 Hz;f为信号频率。当信号频率低于转折频率 f0时,谱密度的斜率则由系数α来表征。
从公式(1)可以看出,磁噪声大致有2部分组成:1)与频率不相关的均匀白噪声;2)在低频段的1/f噪声。
人们对磁噪声的来源也进行了大量分析和研究,发现这种噪声信号主要是磁芯在周期信号激励下,由于饱和状态之间切换的不对称、不可重复性造成的。这种现象通常来源于巴克豪森跳跃参数的波动,这种波动的强度还会随时间变化。为了降低磁噪声,应当尽量使得磁芯处于深度饱和状态,从而提高重复性。对于大多数磁芯材料而言,这就需要提供更强的激励磁场,这显然不利于磁通门的功耗和便携性。另一种方法是,将磁芯在真空或惰性气体中进行退火,并在整个退火时间内应用交变磁场,这使得磁畴在反复“摩擦”过程中变得平滑。退火工艺本质上是使得磁芯内部自由能分布均匀,使磁畴壁自由活动,是减少磁噪声的有效手段[4-7]。
多磁畴壁材料显然不是最理想的,如果在某种激励方式下,使得磁芯处于单畴状态,或者通过在具有单轴各向异性的材料中固定畴壁来避免磁畴壁的移动,也是步入低磁噪声的有效途径。在这方面,俄罗斯研究人员取得了较好的进展。首先,他们采用多层光刻技术,将多层钇铁石榴石(YIG)单晶体薄膜构造成近似椭球体的厚度刨面。然后,采用正交的2组线圈实现旋转的激励磁场,该单晶薄膜内不同角度的磁化率不同,在旋转磁场的作用下,外界磁场被调制到旋转频率的二次谐波上,随后通过感应线圈输出电压信号,经过解调后得到外界磁场值。由于是单晶薄膜,不存在巴克豪森效应,它的灵敏度极限水平取决于磁芯材料的热噪声,理论上可以达5 fT/Hz1/2,文献[8]中实现的灵敏度水平为100 fT/Hz1/2,主要是因为感应线圈的热噪声,因此具有进一步提高灵敏度的潜力。该方法还可以在同一个单晶薄膜上实现三维磁场的测量[9],非常有利于传感器的小型化。
1.2 磁芯的形状
磁芯的形状使得磁芯内部的磁场强度H小于外界空气的磁场强度H0,通常采用退磁因子D表示。将该因子考虑在内,磁通门感应线圈输出的电压可以表示成[10]:

由公式(2)可以看出,退磁因子越大,灵敏度越低,应尽量减少退磁因子。旋转椭球体、球体、无限大薄片,细长圆柱体等简单形状可以通过该公式计算,复杂的形状则很难通过公式推导。在磁通门传感器设计中,通常的经验是增加磁芯材料的长径比,该比值越大,退磁因子越小。目前常常采用的磁芯形状为跑道型、环形、棒状、带状、丝状等,其中带状和丝状磁芯非常适合磁通门的小型化和便携化,跑道型和环形磁芯的退磁因子较大,但闭合磁路非常适合低噪声磁通门的设计,常用于空间探测和地球物理观测。
1.3 探头的结构
单轴磁通门传感器如图 1(a)所示。这种结构类型的磁通门传感器结构简单、易制作,但是感应信号中的奇次谐波严重影响了探头的性能,使得其分辨力较低,静态和动态噪声都很差[11]。
平行磁通门传感器如图1(b)所示。这种结构类型的磁通门传感器由两根平行、尺寸一致的磁芯构成。它们的激励线圈反向串联,使得感应信号中只包含偶次谐波,抵消了奇次谐波。
跑道型磁通门传感器如图1(c)所示。它是平行磁通门传感器的一种特例,平行磁通门传感器的磁路一旦闭合,就构成了跑道型磁通门。
环型磁通门传感器如图1(d)所示。它又是跑道型磁通门传感器的一种特例。
图1 几种常见磁通门传感器探头结构Fig.1 Common fluxgate sensor structures
平面型磁通门传感器,或称为PCB磁通门传感器,如图2所示。传统的磁通门探头需使用绕线机进行探头绕制,工艺复杂且探头的一致性无法保证。近些年,越来越多的科研工作者都在研究平面型磁通门探头,这种传感器的激励线圈和接受线圈都是采用PCB工艺实现的,从而简化了工艺流程,有利于磁通门的小型化和低功耗化[12]。
图2 平面型磁通门传感器Fig.2 Planar fluxgate sensor
正交型磁通门传感器如图3所示。该结构最大的特点是去掉了激励线圈,并在磁芯中加入1个直流偏置,具备高灵敏度与低功耗的潜力[13-14]。
图3 正交型磁通门传感器Fig.3 Othogonal fluxgate sensor
2 磁通门传感器的电路结构
磁通门电路通常由激励电路、相敏检波电路、反馈电路3部分组成。根据信号处理方式的不同,磁通门电路可以分成全模拟式、全数字式、模数混合式3种构型。
2.1 磁通门激励电路
磁通门激励电路作用于探头内部的激励线圈,产生周期性的激励磁场,使磁芯在饱和状态之间不断地切换。根据激励方式的不同,可以分为电压激励和电流激励2种,电压激励在电路上更容易实现。磁通门传感器采用的激励波形常用的有正弦波激励、方波激励、脉冲激励、三角波激励等,其中基于H桥电路的方波激励最为常用。
根据笔者的实际经验,常规磁通门采用方波电压激励即可。除了激励电路简单外,随着信号处理技术的进步,奇数谐波引入的误差几乎可以忽略不计。对于低功耗(100 mW以内)磁通门来说,在满足灵敏度要求下,低功耗设计的关键是尽量减小激励方波的占空比或采用脉冲波形。实际上,50%占空比的方波在激励过程中,很大部分能量毫无效率,以热量的形式白白浪费掉了。激励频率的稳定性也很重要,建议采用陶瓷谐振器、无源晶振、温补晶振等高稳定性频率源通过分频获得同源的激励频率和对应的二倍解调频率[15-16]。
2.2 全模拟式电路
全模拟式磁通门电路如图4所示,其特点是信号处理与反馈电路均采用模拟电路实现,磁场信号以模拟电压的形式输出。磁通门信号处理电路最常用的结构是单臂相敏检波电路,其中模拟开关 S相当于乘法器,它将二倍解调频率信号与感应线圈输出的二次谐波分量电压信号进行相乘,这样,感应信号中的二次谐波信号被搬移到直流点上。积分电路对直流信号进行积分,输出的电压通过1个电阻构成的反馈电路至补偿线圈,补偿线圈中电流会产生1个与外磁场方向相反的补偿磁场,直至磁芯内部磁场为0。此时,当外场恒定不变时,二次谐波信号的幅度为0,积分电路不再工作,输出电压维持恒定。当外界磁场发生变化时,平衡被打破,直到重新平衡。因此,可以通过积分电路的输出电压计算外界磁场的大小[17]。
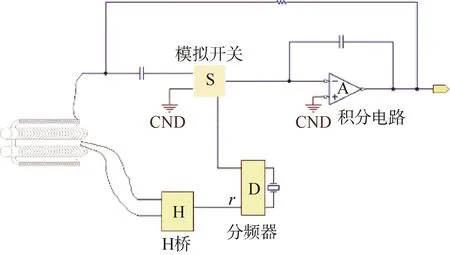
图4 全模拟式磁通门电路Fig.4 Full analog fluxgate circuit
全模拟式磁通门电路结构简单,传感器带宽取决积分时间,可以实现非常快的响应。但是其缺点也很明显:1)输出的模拟电压信号需要配套相应的数采电路才能实现数字化;2)模拟信号链路不可避免的具有温漂,不利于低温漂磁通门的实现,对于长期地磁观测来说,这一点尤其重要。
2.3 全数字式电路
与全模拟式磁通门电路不同,全数字电路在信号处理和反馈电路上全部实现了数字化。磁通门感应线圈输出的电压信号经过简单的隔直和抗混叠滤波处理后,直接进入高速ADC进行数字化,然后在FPGA中进行数字式解调。数字式解调可以采用双臂结构,由查找表构成的DDS输出相位相差90°的正弦与余弦信号,通过数字乘法器与数字化的感应信号相乘,再经过数字低通滤波器得到I和Q分量,进而计算出二次谐波的幅度。反馈电路则采用DAC构成数控双向电流源,不同的反馈算法决定了数字式磁通门的工作方式。常用2种反馈算法:1)实时磁场反馈算法,根据二次谐波的幅值,进行实时反馈,这与模拟电路工作方式类似,适合外界磁场变化较大的应用;2)固定磁场反馈,补偿线圈产生的磁场是固定的,通过补偿到接近外磁场大小即可,数值在几十到几千nT之间,这种方式适合台站类观测,输出的磁场数据由固定的补偿磁场与变化的磁场2部组成[18-20]。
全数字化电路优势明显。首先,数字式解调比模拟式解调具有更高的信噪比,有利于降低噪声。其次,一旦数字化,整个信号处理链路不再受温度等外界环境参数的影响,有利于低温漂磁通门的实现。目前,全数字化电路主要缺点是电路结构相对复杂,功耗较大,由于调制频率通常在几kHz到十几kHz之间,为了减少量化误差,全数字化电路需要高速高精度的ADC才能实现,无疑增加了设计难度和成本。不过,随着电子技术的发展,上述全数字化电路的缺点能够被一一克服。
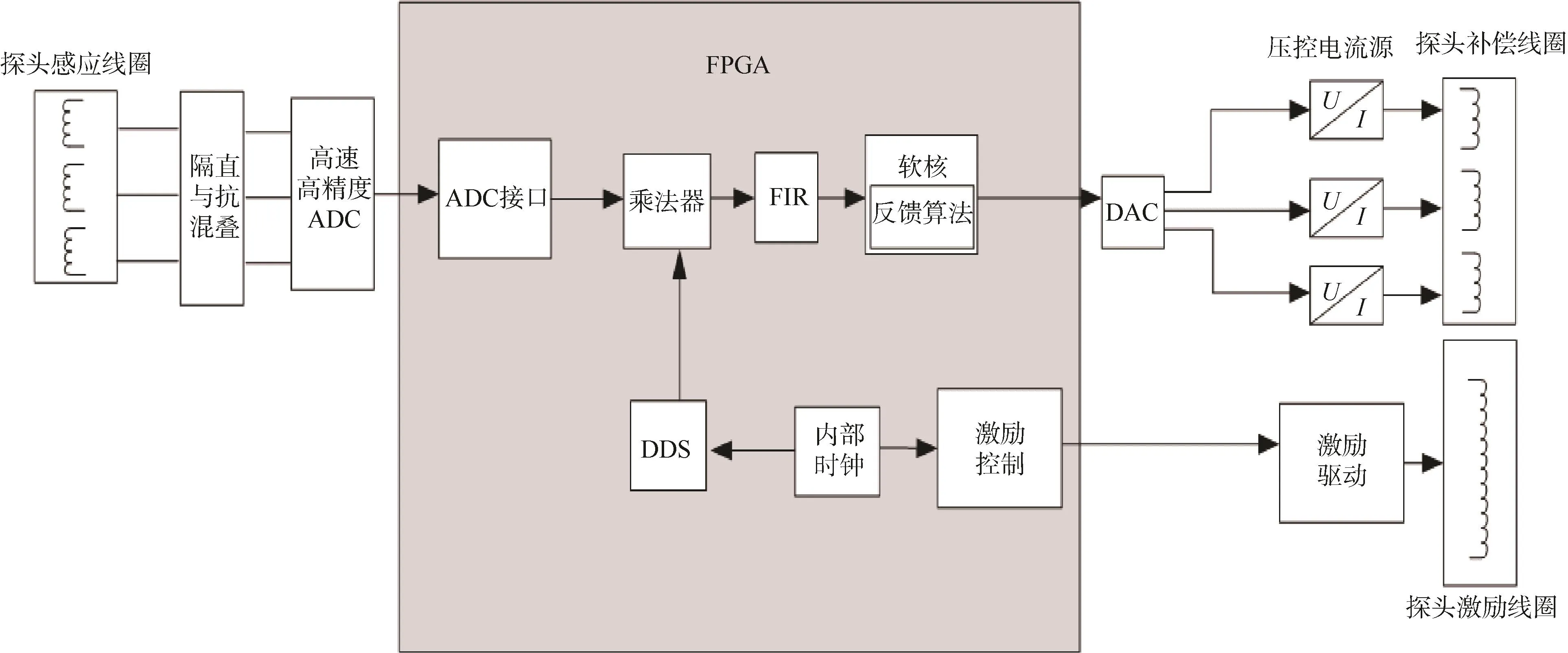
图5 全数字式磁通门电路Fig.5 Full digital fluxgate circuit
2.4 模数混合式电路
模数混合式电路则是取全模拟式电路和全数字式电路之长,舍去二者之短,是一种经济高效的实现方式。其主要特点是采样模拟开关实现乘法操作,使用低速高精度ADC进行数字化,在微处理器内进行数字低通滤波处理,反馈电路则和全数字式电路相同。与全数字式电路相比,关键器件要求降低,使得成本和开发难度也得到降低,对噪声影响较大的低通滤波器仍是数字化的,因此在整体性能上基本没有损失。由此可见,模数混合式电路结构目前是一种比较好的电路结构,性价比高。
2.5 磁通门电路的芯片化
目前TI公司已经推出DVR401、DVR411、DVR421等集成式磁通门传感器芯片,其测量范围约在±8 000 nT,噪声水平在 17 nTrms(0.1~10 Hz),这些指标相比一般磁通门电路来说很差,因此只能应用于电流传感器的设计。适合高精度磁场测量的磁通门处理芯片还未出现,这是非常值得探索和研究的方向,具有一定的挑战性。它要求研究者既要具备磁通门传感器设计的专业知识,也要熟悉集成电路的设计流程[21]。
3 国内外磁通门传感器研究水平
3.1 国外磁通门研究水平
国外对磁通门传感器的研究主要集中在欧美国家,比较著名的有英国的Bartingdon公司。该公司最新研制的Mag13系列磁通门传感器内部集成有温度补偿电路,其灵敏度可以达到4 pT/Hz1/2@1Hz。该公司mag649低功耗磁通门在优良的性能上,功耗可以做到几十mW以内,非常适合海底磁场的观测。乌克兰LEMI公司生产的磁通门性能也非常优良,如Lemi-029磁通门灵敏度水平达到6 pT/Hz1/2@1Hz,用于大地磁场长周期观测的Lemi-424灵敏度水平小于10 pT/Hz1/2@1Hz,温漂小于0.3 nT/℃。美国Billingsley Aerospace & Defense公司生产的TFM100-G2磁通门灵敏度水平可以达到12 pTrms/Hz@1Hz,被广泛用于飞行姿态控制和航磁补偿。TFM100G4-UWH磁通门灵敏度水平可以达到20 pTrms/Hz@1Hz,该型号专门用于水下。
3.2 国内磁通门研究水平
目前国内也有多家单位开展磁通门传感器的研究,国内一些科研机构的研究成果在某些性能指标上已经接近国外产品,具体性能指标如表1所示。

表1 国内主要研制单位情况Table 1 Brief introduction of main domestic R&D units
中国船舶第七一〇研究所在20世纪70年代就开始磁通门传感器的研制,已形成多个系列化的磁通门传感器产品,相关产品已应用于多个型号项目中,当前研制的最新型号 MS3A型磁通门(图 6所示)已达到国际先进水平。

图6 MS3A型低噪声磁通门及探头结构Fig.6 MS3A low-noise fluxgate sensor
尽管国内磁通门研究水平在相关指标上取得了长足的进步,但是我们还是要清醒地意识到国内研究水平同国外仍有不小的差距,主要表现在以下几点:
1)国内的研究大部分是跟跑国外相关产品,自主创新性较差;
2)适合磁通门的高性能磁芯材料的研究与制备基础十分薄弱;
3)在低功耗、数字化方面的工作还有待进一步研究;
4)国产磁通门产品的稳定性、可靠性、便携性等指标还有待市场的检验。
磁通门传感器未来仍具有进一步发展的巨大潜力,预计会有以下几个方面的突破:
1)更高的灵敏度水平。目前已有相关研究,通过采用新材料和新技术取得了亚pT量级的灵敏度,但还未形成成熟的产品。在地磁场范围内,如果突破pT量级的磁通门一旦成熟,可能会对光泵类磁力仪在某些应用上形成巨大挑战,也能开拓新的应用领域,比如脑磁、心磁等医学应用。
2)更低的功耗。目前成熟的低功耗磁通门能够做到几十mW量级,采用新的探头结构和信号处理方式,磁通门的功耗仍有进一步降低的空间,甚至有望突破mW量级。
3)更小的体积。目前玻璃包覆非晶丝和水纺非晶丝能够使得磁芯在非常小的尺寸下保持较高的长径比,非常有利于设计微型磁通门。如果再将微机械加工、电路微组装、芯片化等技术引入,更小的磁通门会离我们越来越近。更小的体积意味着更高的空间分辨率,能够扩展新的应用领域[22]。
4 磁通门传感器在海洋领域的应用
4.1 水下磁性目标探测
海底沉船、海底城市遗址、水下未爆弹等水下磁性目标通常具有区别于周围区域的磁场特征,因此常用磁力仪进行探测。磁通门磁力仪结构便携,可以搭载在潜航器、船只等各种载具上,对水下磁性目标体进行探测。图7展示了美国Woods Hole海洋研究所的ABE无人潜航器搭载的一只三轴磁通门传感器,用于水下磁性目标探测[24-25]。
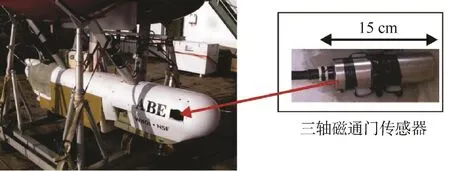
图7 潜航器搭载磁通门传感器Fig.7 Submarine with fluxgate sensor
4.2 海底磁场观测
海底磁场观测是研究海洋地壳和上地幔结构的一项重要的地球物理技术,在没有外部电源和通讯的情况下,要求磁力仪系统能够坚持几个月甚至超过1年的时间。因此,功耗较大的量子类磁力仪,如质子磁力仪、光泵磁力仪等不适合海底磁场长期观测。另一个原因是,此类量子磁力仪大多数具有死区,操作复杂,所以,对于海底磁场观测来说,也只有低功耗磁通门能够满足要求。图8展示的一种微型海底磁场观测系统就是基于低功耗磁通门mag648,它专门投放到海底进行多点和长期观测,用于研究地球内部构造和活动[23]。该系统能够连续观测正交三轴磁场,最大采样频率为5 Hz,精度为0.1 nT。
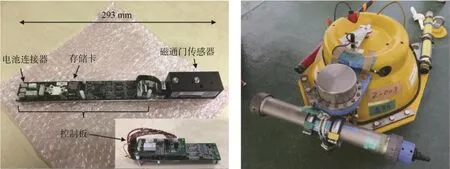
图8 微型海底磁场观测系统Fig.8 Miniature seafloor magnetic field observation system
4.3 重要港口和水道的安防
在港口安防领域,通过布设磁通门阵列来检测目标入侵。DADS是美国海军研究办公室(ONR)和空间与海战系统司令部(SPAWAR)联合研发的未来海军滨海防雷反潜作战研究项目。该系统由14个固定节点及数个移动节点组成,包括2个传感器节点、2个浮标网关节点、10个遥控声呐中继节点,服务器部署在岸基指挥中心。传感器节点根据港口实际情况布设有数量不等的磁通门传感器单元,传感器采集的数据通过网关节点发送至岸基指控中心处理。
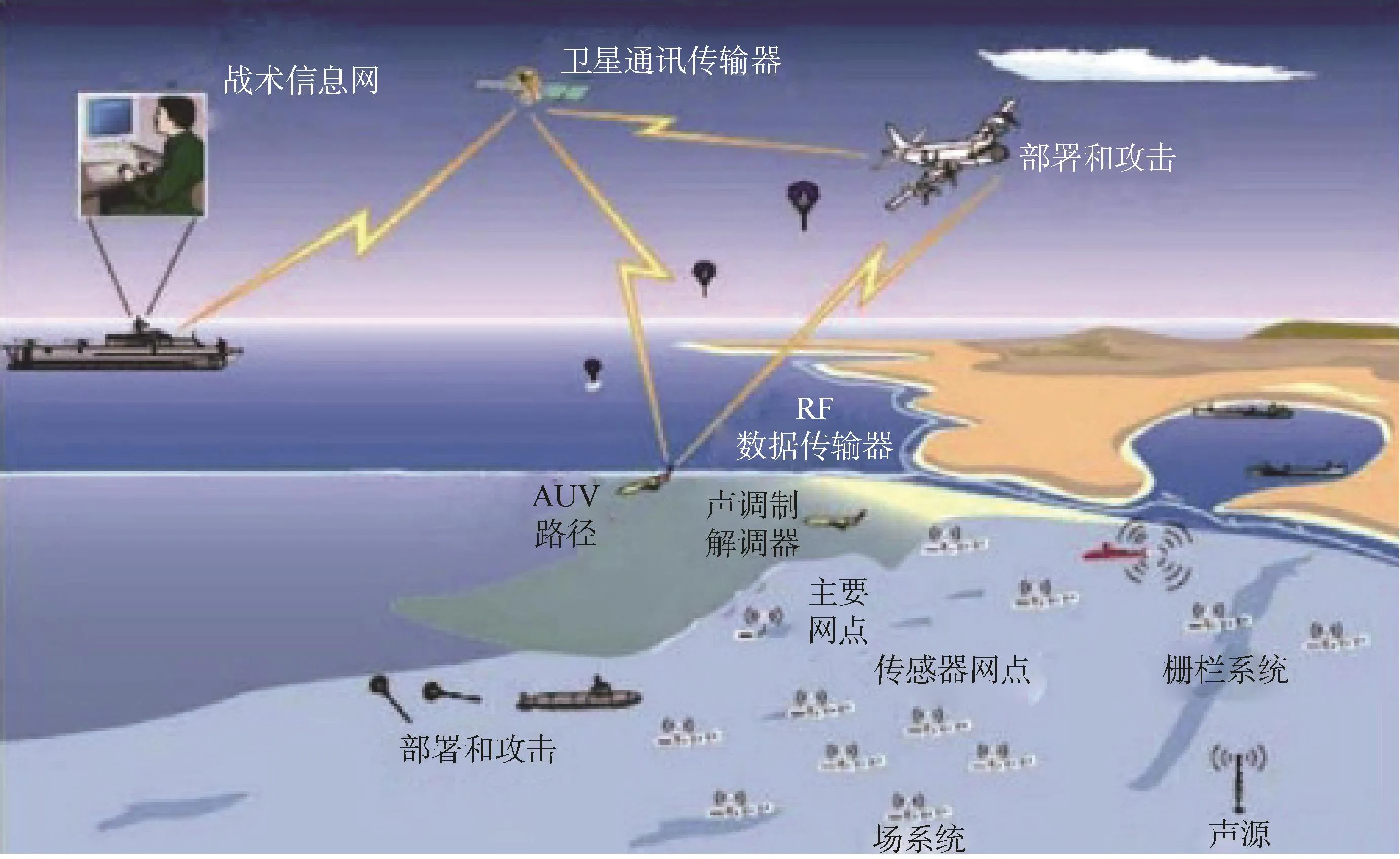
图9 基于磁通门阵列的美国DADS系统架构示意图Fig.9 Schematic diagram of U.S.DADS system based on a fluxgate sensor array
2003年,芬兰海军开始了叫做SURA 的计划,即轻型移动式水下监视系统。TietoSaab系统是一个定制为水下监视目的的磁性网线或近似传感器网络的系统样机。传感器网络由结实的、装备微控制器的磁通门传感器,链接到水下轻型数据总线和电力缆。传感器链以一个水下网络中心为终端,这里装备有全向水听器和DSL 调制解调器,传送测量数据到海岸站点。海洋试验系统样机显示了快速布放的需求,港口入口或狭窄航路监视系统的探测能力满足对传感器链的期待。开发的系统费效比高,所有设备为便携式。理论和实验都显示探测具有非常小的磁背景偏离,虚警率低。此外,传感器间隔能调整,网线能够连到监视装备,形成分层防卫栅格子,提供有限目标追踪能力。

图10 磁通门传感器定制包装在一个小铝容器中Fig.10 Fluxgate sensors tailor-made packaged in a small aluminum container
4.4 水下武器装备
水雷磁引信主要利用舰船磁场的空间特性和时域特性而工作,早在第一次世界大战末期,就出现了利用舰船磁场引爆的非触发磁性水雷。由于磁通门传感器具有磁场矢量测量特性,目前在沉底水雷引信系统中一般都集成有磁通门磁引信,利用三分量磁通门磁引信可探测舰船目标引起的磁场变化。图11为搭载磁引信的美国“破坏者”MK41型沉底水雷。

图11 磁引信用于美国“破坏者”MK41沉底水雷Fig.11 Application of magnetic fuze in U.S.Destructor MK41 bottom mine
4.5 水下磁通信
目前,水下通信主要有水声通信、光通信、电磁通信等手段,其中水声通信可达数千米,但是数据时延大,数据速率低,易受环境影响。光通信传输距离在百米左右,易受光散射和背景光污染,和水声通信一样,通信隐蔽性较差。水下磁通讯是目前水下通信的热点和未来发展方向之一。磁通门传感器体积小,灵敏度高,非常适合做磁信号接收机。
5 结束语
本文对磁通门传感器的探头结构和信号处理电路进行了概述,介绍了国内外的研究进展及其在海洋领域的典型应用。随着磁芯材料和电子学技术的发展,磁通门传感器仍具有进一步发展的巨大潜力。未来,它将向更高的灵敏度、更低的功耗、更小的体积等趋势发展。同时,会开拓更多的应用领域,高性能的磁通门传感器在海洋磁探测领域将得到更广泛的应用。
猜你喜欢
矿业安全与环保(2022年2期)2022-05-20
当代陕西(2022年6期)2022-04-19
北京航空航天大学学报(2021年4期)2021-11-24
舰船科学技术(2021年12期)2021-03-29
华人时刊(2020年13期)2020-09-25
劳动保护(2019年3期)2019-05-16
中学生数理化·高二版(2016年12期)2017-02-28
饮食科学(2016年7期)2016-07-27
Coco薇(2016年1期)2016-01-11
中国实用医药(2016年2期)2016-01-05