
基于ARM的化学发光免疫分析仪控制系统*
2021-03-05 07:15:28张啸天钟道鸿李俊纬
传感器与微系统 2021年2期
张啸天,倪 屹,郭 瑜,钟道鸿,李俊纬
(江南大学 物联网工程学院,江苏 无锡 214122)
0 引 言
化学发光免疫分析(chemiluminescence immunoassay,CLIA)是一种用来检测人体中多种化学成分的临床医学检测分析技术[1]。CLIA可用于药物浓度检测以及肿瘤标志物、激素、抗原、抗体等多种临床项目的检测,具有高精确度、高灵敏度、强特异性等优点,目前已经成为临床免疫检验中的主要方式[2~4]。目前CLIA的研究方向主要体现在两个方面:1)在理论技术方面,增强光源发光效率,提高检测灵敏度,结合生物化学技术,探索新的免疫分析方法;2)优化仪器的检测结构,降低系统误差,缩小体积,提高检测的速度和稳定性。整体趋势是高速化、自动化、智能化、集成化。为了提高仪器的检测稳定性,本文提出了一种基于ARM的化学发光免疫分析仪的控制系统。采用ARM芯片为主控CPU,通过FPGA和STM32实现电机的运动控制算法。具有更低的系统误差和更高的检测稳定性。
1 化学发光免疫分析的原理
化学发光反应是某类物质吸收能量并产生光辐射的现象。化学反应产生足够的化学能被特定物质分子吸收并跃迁至电子激发态,其跃迁回稳定的基态时会辐射出光子。免疫分析依据化学反应发出的荧光光强与待检测物质的含量呈一定地数学关系而实现。以标记方式的不同CLIA分为化学发光标记免疫分析法、化学发光酶免疫分析法、增强发光酶免疫分析法等。系统采用化学发光标记免疫分析法,标记物选用吖啶酯类化合物,发光方式为闪烁型发光,辐射光波长470 nm,发光时间0.4 s。此方法无需外接光源,荧光量子效率高,稳定性好。
2 化学发光免疫分析仪系统
2.1 总体结构
化学发光免疫分析仪的检测系统主要由控制系统、加样系统、光子计数系统三个部分构成。系统结构如图1所示。上位机用于向控制系统发送控制命令,接收运行状态信息和数据处理。控制系统由ARM和电机控制模块组成,负责与上位机的通信,运动任务的调度,精确控制电机的运动参数等。加样系统用于样品注入和传送反应杯。光子计数系统负责发光剂的加注和荧光光子的采集计数。
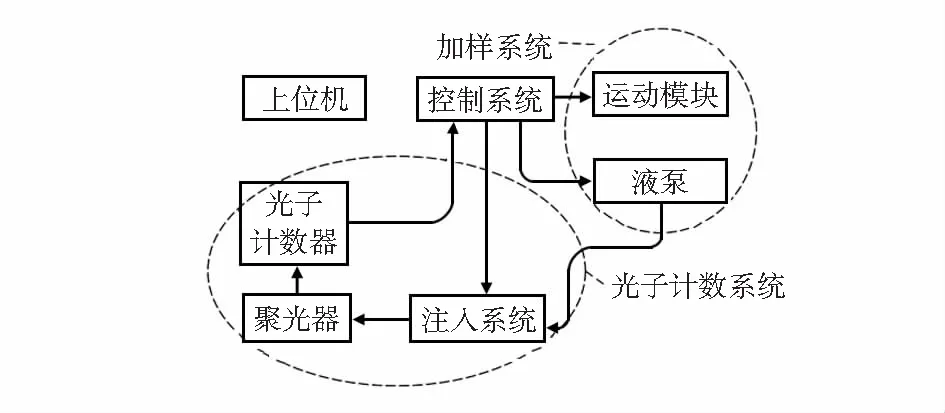
图1 化学发光免疫分析仪系统结构框图
2.2 加样系统
加样系统主要由机械臂和吸液针构成。吸液针通过高精度柱塞泵(精度为0.2 μL)将待测样品定量吸入并注射到反应杯中,由机械臂将反应杯传送至暗室进行发光剂加注与反应光的测量。系统中预置冲洗位,每个加样动作后由隔膜泵输送纯水和清洗液对吸液针进行清洗。为防止输液管内有残余空气影响加样精度,在检测前,每个液泵要预先加注1 min的纯水。
2.3 光子计数系统
光子计数系统由检测暗室、聚光器、光子计数器组成。发光反应的荧光用普通的光电检测方式难以被探测到(光强10-15~10-16W左右),因此必须采用单光子计数法。系统设计了顶部出光式锥型聚光器对反应杯顶部的荧光进行收集,以降低荧光的光强损失。反应杯被送入暗室后加注发光试剂发生发光反应释放出光子。锥型聚光器将光子聚集在光电倍增管(PMT)的阴极窗口,单个光子经多级电场加速倍增后以单光子脉冲的形式被阳极接收,脉冲经放大滤波后由计数器统计光脉冲数量[5~9]。
2.4 光子计数器
光子计数器由PMT、放大器、甄别器、计数器构成。选用的PMT是滨松公司的CR275型,该管型在波长470 nm左右量子效率较高。甄别器基于电压比较器TL3016实现,采用±5 V双电源驱动、锁存端接地。硬件电路如图2所示。
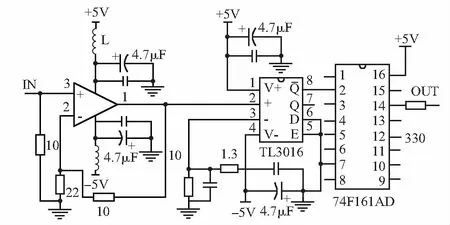
图2 放大甄别器原理图
计数器主要由加法器74HC161和单片机PIC16F917上的16位计数器Time1组成。计数程序使用异步清零法,当MR端输入低电平时清零。使用外部门控信号输入,时钟周期20MHz。由于串行外设模块不是MSSP,要通过软件控制IO口线模拟实现启动和停止。硬件原理如图3所示。
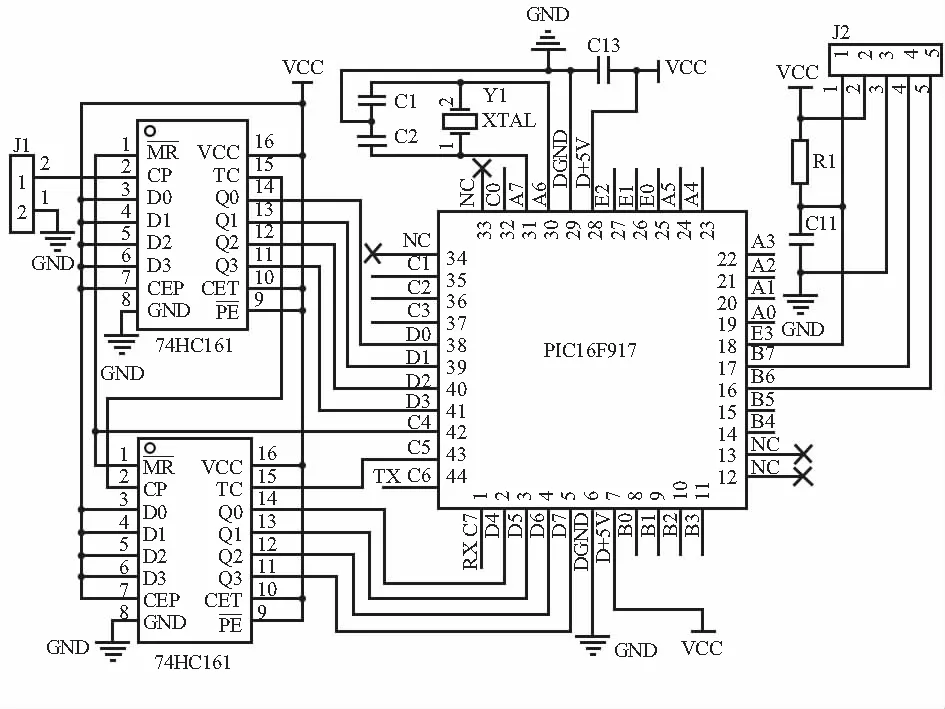
图3 计数器原理图
2.5 控制系统设计
控制系统结构如图4所示。整个系统包括3个模块:基于ARM的主控模块、基于FPGA的步进电机控制模块、基于STM32的伺服电机控制模块。主控CPU是TI公司的AM3352BZCZD80芯片,上位机通过USB转串口与主控模块通信。主控模块分别使用CANopen和CAN总线控制伺服控制器和步进电机控制模块,同时还要用于控制液泵的进样速度。FPGA模块用于设计步进电机的S型运动曲线。采用LATTICE的LCMXO2—7000HC芯片为步进电机提供驱动信号。由于物理距离较短噪声影响低,各步进电机驱动器间采用SPI完成通信。伺服控制器基于STM32F405设计,采用三环控制模式实现机械臂的精确运动。为了实现高稳定性与高速化在通信中省去了繁杂的CRC校验,将CAN总线的负载率控制在40 %,这个负载率下既不会出现丢包也能满足仪器的通信速度需求。
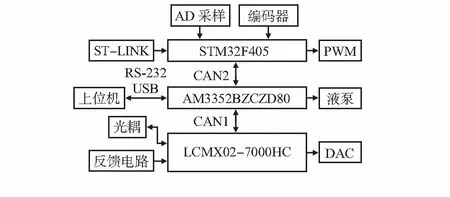
图4 控制系统结构原理图
2.6 运动控制程序设计
伺服控制器和步进电机运动控制模块的程序设计是通过移植μC/OS II操作系统并利用其任务调度功能实现。μC/OS II系统是专为嵌入式应用而设计的,其本身具有很强的移植性。移植过程简单只需要改写os_cpu_a.asm和os_cpu.c等文件即可。运动控制程序用于电机的速度、转向、位置控制及协调多台电机工作。运动控制共5个任务。1)AD检测:对电机运行参数的反馈信号进行采集;2)中断检测:检测是否有控制命令发出;3)错误诊断:对电机位置信息进行采集,没有达到预测值或运动超时则报错并停止运动;4)状态通信:将运动结果上传至主控CPU。在操作系统设计中将中断检测的优先级设定为最高,因为其关系到命令的接收和唤醒其他任务。程序采用高频中断计算延时方式控制电机加减速。控制流程如图5所示。
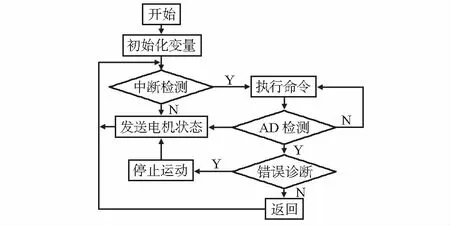
图5 运动控制流程
3 实验测试
对仪器的关键性能参数[10]按照国标进行测试,主要测试项目为线性相关性和批内测试重复性(CV)。测试设备如图6所示。
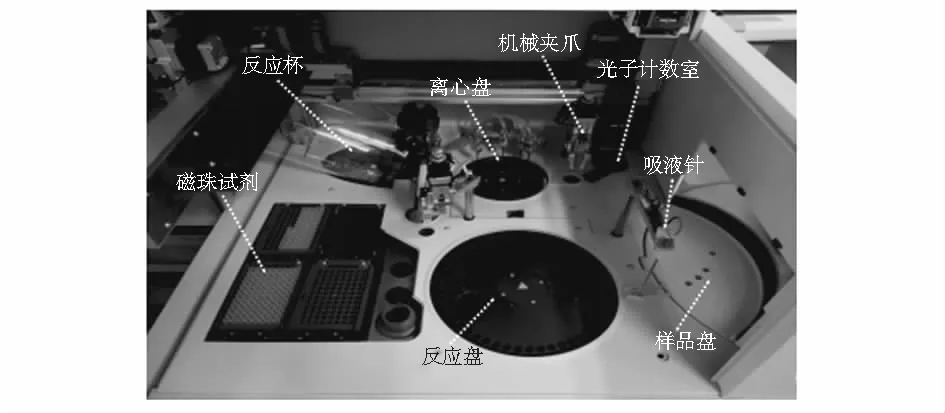
图6 实验测试设备
3.1 线性相关性
将测试专用的高值发光剂用稀释液按一定浓度梯度稀释成6个样品,混合均匀后分别检测相对光子强度(RLU)。每个样品重复测定3次,计算三次样品检测结果的平均值。数据显示仪器线性检测范围达到了103~106数量级。结果如表1所示。
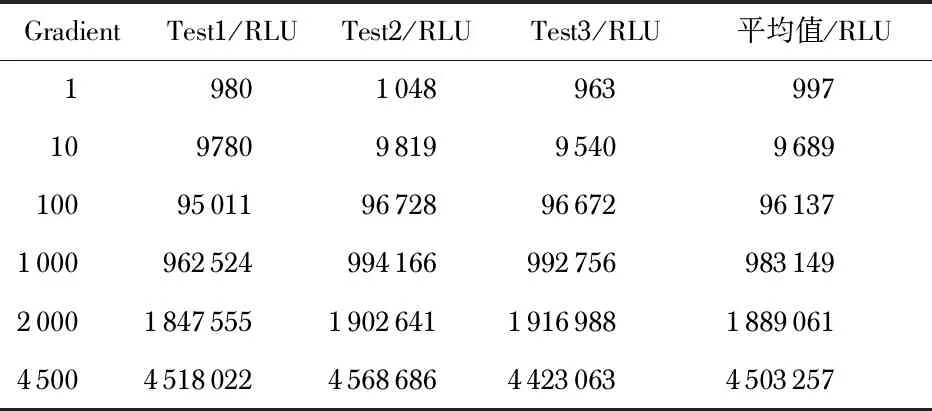
表1 线性度测试数据
用最小二乘法对6组样品进行曲线拟合。拟合曲线图以稀释比例为自变量,以每次检测结果的均值为因变量,得出线性回归方程并导出线性回归的相关系数R2。拟合曲线如图7所示。算得R2=0.999 22高于0.99符合使用标准。

图7 线性度数据拟合曲线图
3.2 批内变异系数对比测试
为验证仪器的检测稳定性,设计了与市场主流分析仪的检测变异系数(CV)对比测试。使用临床测试AFP标准品重复测试20次,并根据式(1)计算出CV值

(1)

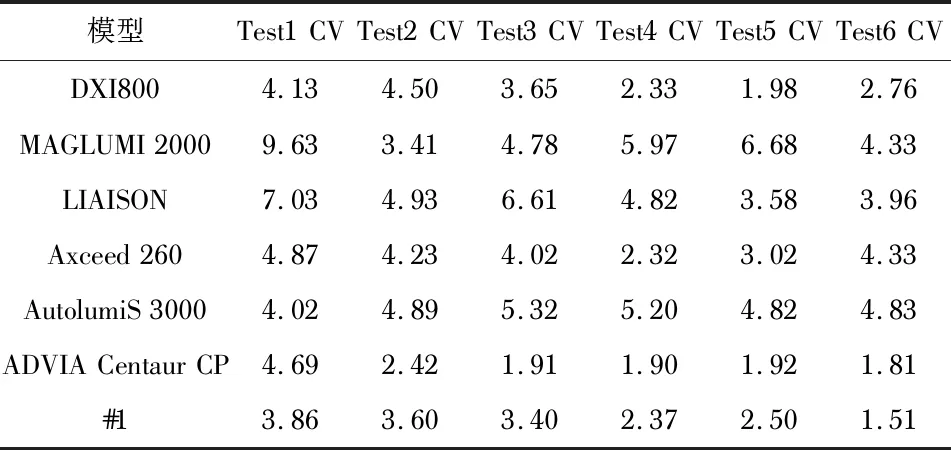
表2 批内变异系数对比测试 %
4 结 论
本文设计了以ARM为核心的控制系统。以ARM为主控芯片,分别通过CAN和CANopen控制FPGA模块和伺服控制模块,通过测试设置了合适的总线负载率。通过FPGA模块和伺服控制器的协同工作实现了电机高速、低噪声、低失步率的运行。系统实现了高稳定性,低系统误差,高响应速度。实验测试表明:在该控制系统下仪器的检测线性相关系数,线性检测范围均达到使用标准。仪器的检测CV降低至1.37 %~3.86 %。检测稳定性,检测速度均能满足使用要求。
猜你喜欢
光子学报(2022年11期)2022-11-26 03:43:44
煤气与热力(2022年2期)2022-03-09 06:29:30
分析测试学报(2015年8期)2016-01-13 06:19:35
分析测试学报(2015年6期)2016-01-13 06:19:02
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:20
湖南师范大学自然科学学报(2015年1期)2015-02-27 14:50:05
现代检验医学杂志(2015年1期)2015-02-06 01:59:24
机械制造与自动化(2014年1期)2014-03-01 04:21:57
原子与分子物理学报(2014年4期)2014-02-28 22:18:47
河南科技(2014年10期)2014-02-27 14:09:30
