面向智能船舶的雾天图像去雾方法*
2021-03-05 00:47唐云鸢徐海祥
武汉理工大学学报(交通科学与工程版) 2021年1期
唐云鸢 冯 辉 徐海祥
(武汉理工大学交通学院1) 武汉 430063) (高性能船舶技术教育部重点实验室2) 武汉 430063)
0 引 言
航行环境智能感知与分析作为智能航行的关键技术之一,通过目标检测、目标识别以及目标跟踪使智能船舶实现自主航行与避障[1-2].智能船舶通过视觉成像系统获取的周边环境信息对近景进行监视,主要由可见光摄像头组成.因恶劣天候因素的影响,海上常常伴有海雾出现.摄像头拍摄出的景物受到悬浮颗粒的散射作用,可见度与对比度发生大幅度降低,严重影响了智能船舶视觉系统的性能.提高雾气环境下所获图像的清晰度是智能船舶实现智能感知周边目标与障碍物等技术手段的重要前提.
单幅图像去雾方法包括基于图像增强的方法和基于物理模型的方法[3].Land等[4]提出了视网膜皮层理论(Retinex理论).此类方法未考虑雾的形成原理以及对图像影响的物理学基础,从而导致恢复出的图像部分信息缺失,或因过度处理而产生失真的现象.随后几年基于物理模型的方法逐渐成为研究主流.Tan[5]基于大气光的颜色与亮度相互独立的假设,提出基于马尔科夫随机场的去雾方法.Fattal[6]假设物体对光的反射率与其表面光强照度不相关推算透射率,但该方法需要足够的物理色彩信息,不适用于浓雾场景.He等[7]提出了基于暗通道的先验算法,但该方法对不满足暗通道先验理论的明亮区域的恢复结果会出现明显的图像失真.文献[8]提出用引导滤波算法代替Soft Matting算法对传输图进行优化,极大的减少了运算时间.然而已有的去雾算法普遍应用于陆地场景如城市道路监控,针对海雾这种特殊场景的较为少见.
为此,文中提出适用于海雾环境下考虑组合权重的暗亮通道先验协同去雾方法,并对结果进行了仿真实验对比分析.优化大气模型的物理结构;通过暗亮通道原理预估透射率与大气光值;通过快速引导滤波算法优化透射率,并针对失效区域适当校正透射率;通过改进后的大气物理模型恢复清晰图像.
1 雾天图像的物理模型
在雾天环境下,由于悬浮颗粒致使大气透明度影响了光学传感器的探测距离和成像质量.Narasimhan等[9-11]给出了大气散射物理模型:
I(x)=J(x)t(x)+A[1-t(x)]
(1)
式中:I(x)为含雾图像;J(x)为无雾图像;t(x)为透射率;A为大气光值.假设大气是均匀的,则透射率可为
t(x)=e-βd(x)
式中:β为大气散射系数;d为景深.
文献[7]在对有雾图像进行去雾处理时,假设图像中各个像素点的大气光值相同,并通过选取图像中最亮的像素点的强度作为全局大气光值进行去雾处理.然而通过观察有雾图像,能够发现不同区域具有不同的大气光值,即全局大气光值的假设并不合理,见图1.因此,为了充分考虑图像不同区域大气光值的影响,本文将全局大气光值A用每个像素点的大气光值A(x)代替.于是,改进的大气散射模型为
I(x)=J(x)t(x)+A(x)[1-t(x)]
(2)

图1 不同区域不同的大气光强度
2 考虑组合权重的暗亮通道去雾方法
由于海上图像具有大面积天空等不符合暗通道先验原理的部分,故恢复出的图像经常会有部分区域发生失真和过度处理.因此,本文提出了一种适用于海雾环境下考虑组合权重的暗亮通道先验协同去雾方法,流程见图2.
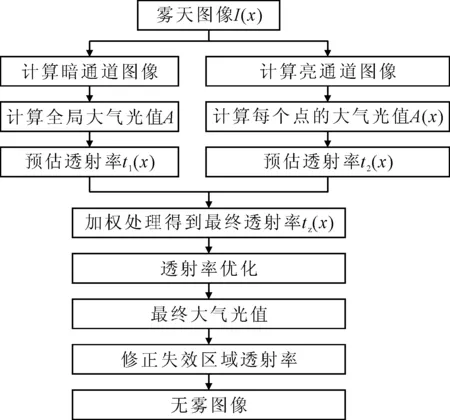
图2 雾天图像去雾算法流程图
2.1 暗通道和亮通道介绍
在绝大多数的非天空区域中,有一些像素点总会存在至少有一个颜色通道的值是非常小的数甚至几乎为零.该结论即为暗通道原理.其表达式为
(3)
式中:Jc为图像J的某一个颜色通道;c为通道的颜色(r,g,b);Ω(x)为窗口区域.根据暗通道原理,在不存在大面积明亮区域的清晰图像中,Jdark约等于零,即
Jdark(x)=0
(4)
类似的,对于任意图像I,其亮通道表达式为
(5)
式中:Ic(y)为图像I的某个颜色通道.
对式(2)进行最大值运算可得:


(6)
亮通道先验原理依赖于以下假设:在图像中的局部范围内,总会存在某个像素点的颜色通道反射率接近100%[12].由于光照在图像中大部分区域是均匀传播的,因此这个像素点的像素值,近似于这个局部区域的光照强度:
Jlight(x)→Alight(x)
(7)
结合式(5)~(7),能够得到:
(8)
2.2 估计透射率
根据A是全局大气光值的假设,基于暗通道原理,将式(1)的等式两边取颜色通道最小,即:

(9)
对上式进行最小运算,并同时除以A可得:
(10)
将式(3)~(4)带入式(10)中,可得介质透射率为
(11)
通常会在式(11)中添加一个常数参数ω(0<ω<1)以保证去雾后的图像不会因过度处理而丢失真实感:
(12)
根据改进的大气散射物理模型式(2)与亮通道先验原理式(8),将式(12)改写为
(13)
为了使去雾算法更加适合于海上环境,本文对透射率的计算进行了改进.文献[13]将200张光照充足图片的亮通道图像的直方图进行了归一化,发现亮通道值只要集中在灰度255处.考虑到海上环境常常是以海天作为背景,并结合暗通道图像的常值化属性,可以认为海上有雾图像的亮通道图像在光照充足的情况下趋近于最大灰度级,即:
(14)
结合式(4)、式(6)、式(9)和式(14)可得:

同样引入一个常数参数ω(0<ω<1):

(15)
将式(13)与式(15)得到的透射率进行加权计算得到最终的透射率.
tz(x)=γt1(x)+θt2(x)
2.3 大气光值的估计

式中:A(x)与Ac分别为亮通道与暗通道计算的大气光;α,β为权重系数.考虑到海上图像大面积为天空海水等不满足暗通道原理的区域,因此将亮通道获取的大气光值设置为较大权重,暗通道获取的大气光值设置为较小权重,并满足α+β≤1.
文献[9]通过在暗通道图像中找到像素值最大的像素点坐标,并在雾天图像中的同一位置选取该点的像素值作为全局大气光值.为了尽可能减少因图像中的白色区域影响而造成大气光值选取的偏差,通过选择暗通道图像中前0.1%像素并将它们的平均值作为Ac.
2.4 优化透射率
引导滤波是通过引导图像指导滤波过程,平滑并保留输入图像细节特征的一种基于局部线性模型的边缘保持算法.快速引导滤波[14]做出的改进是,对输入图像和引导图像进行降采样,利用降采样得到的图像计算局部线性系数,再根据升采样系数得到最终的输出图像.相较于引导滤波,快速引导滤波的运算量大大减小,大幅度的降低了运算时间而且不会引入明显的失真.快速引导滤波包含的主要参数有输入图像p、引导图像I及输出图像q.文献[8]认为输出图像和引导图像间存在如下线性关系:
qi=akIi+bk∀i∈ωk
(16)
式中:q为输出图像;I为引导图像;ωk为半径为r的窗口;ak,bk为当窗口中心位于k时该线性函数的不变系数.
快速引导滤波算法通过将无约束图像复原的方法转化为求最优化问题,并采用最小二乘法拟合式(16)求取系数ak,bk.其代价函数为
式中:正则化参数ε用来防止ak过大.式(17)可以通过以下方法解出:
(18)

2.5 失效区域的处理
海上图像去雾相较于陆上去雾,其背景多为大面积的海天等景物强度接近大气光强的场景,这恰恰是暗通道先验原理通常发生失效的区域.针对失效区域的上述特点,通过大气光的估计来减弱失效区域对透射率估计的干扰,使其能够自然地处理含天空等明亮区域的有雾图像,从而得到理想的去雾效果.
在对图像进行去雾处理之前,引入参数K对原始图像进行失效区域的划分.通过设置阈值的限定来调整暗通道先验原理失效区域的透射率:
(19)


(20)

2.6 还原清晰图像
3 仿真结果与分析
3.1 合成图像去雾结果对比
图3~5为有雾图像及各算法的去雾结果.能够看出经各算法处理后的图像质量都有明显提高.由于海上有雾图像多是以海天为背景,场景信息较少且不满足暗通道先验原理,故多数陆地去雾算法所恢复出的图像经常出现色彩失真等现象.经文献[7]算法、文献[13]算法和文献[14]算法处理后的图片普遍存在亮度较暗的情况,且在天空区域的还原上均存在不同程度的偏差.尽管文献[15]算法去雾后保留了一部分亮度,但在天空区域的处理依旧不尽如人意,可以看到图3中天空的云层由于处理过当而产生了色偏现象,且远景的山脉恢复的也不够清晰;在对图4进行去雾处理后整幅图像的色彩恢复的过于艳丽,导致去雾后的图像缺乏足够的真实度;在图5中同样对于天空区域处理的不够细致,能够看到有晕轮伪影的效应出现.而经本文提出的算法进行去雾后的图像,在亮度和对比度上实现了平衡,不仅目标物体的轮廓信息都更加清晰,背景里的山、港口以及空中的云层均得到了不错的增强效果,色彩上也更自然真实,层次感也更强.
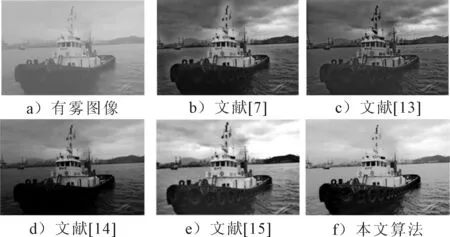
图3 有雾图像及各算法的去雾结果

图4 有雾图像及各算法的去雾结果
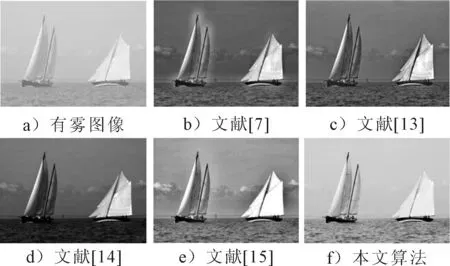
图5 有雾图像及各算法的去雾结果
客观评价指标是模拟人类视觉系统的感知机制来衡量图像质量,本文主要采用峰值信噪比(PSNR)、结构相似性(SSIM)以及去雾时间进行定量评价,结果见表1.其中,PSNR通常是衡量图像失真的指标,峰值信噪比越大,图像失真越少.SSIM用于描述复原图像与原始图像之间的结构相似程度,值越大越好.

表1 采用不同算法去雾后定量评价指标
由表1可知,经本文算法处理后图像的PSNR与SSIM两个指标均好于其他算法,这也符合对去雾后图像的主观视觉感受,也验证了评价指标的准确性.在算法处理的时间方面,所提出的算法不具备优势,但也有着不错的运算效率,在可接受的范围内.
3.2 真实海雾图像去雾结果
通过一组海上有雾图像的仿真实验,将现有算法及本文提出的算法的去雾性能进行比较,实验结果见图6~9.

图6 有雾图像及各算法的去雾结果

图7 有雾图像及各算法的去雾结果
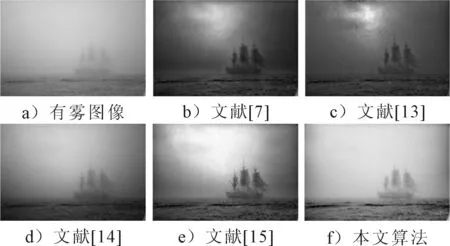
图8 有雾图像及各算法的去雾结果
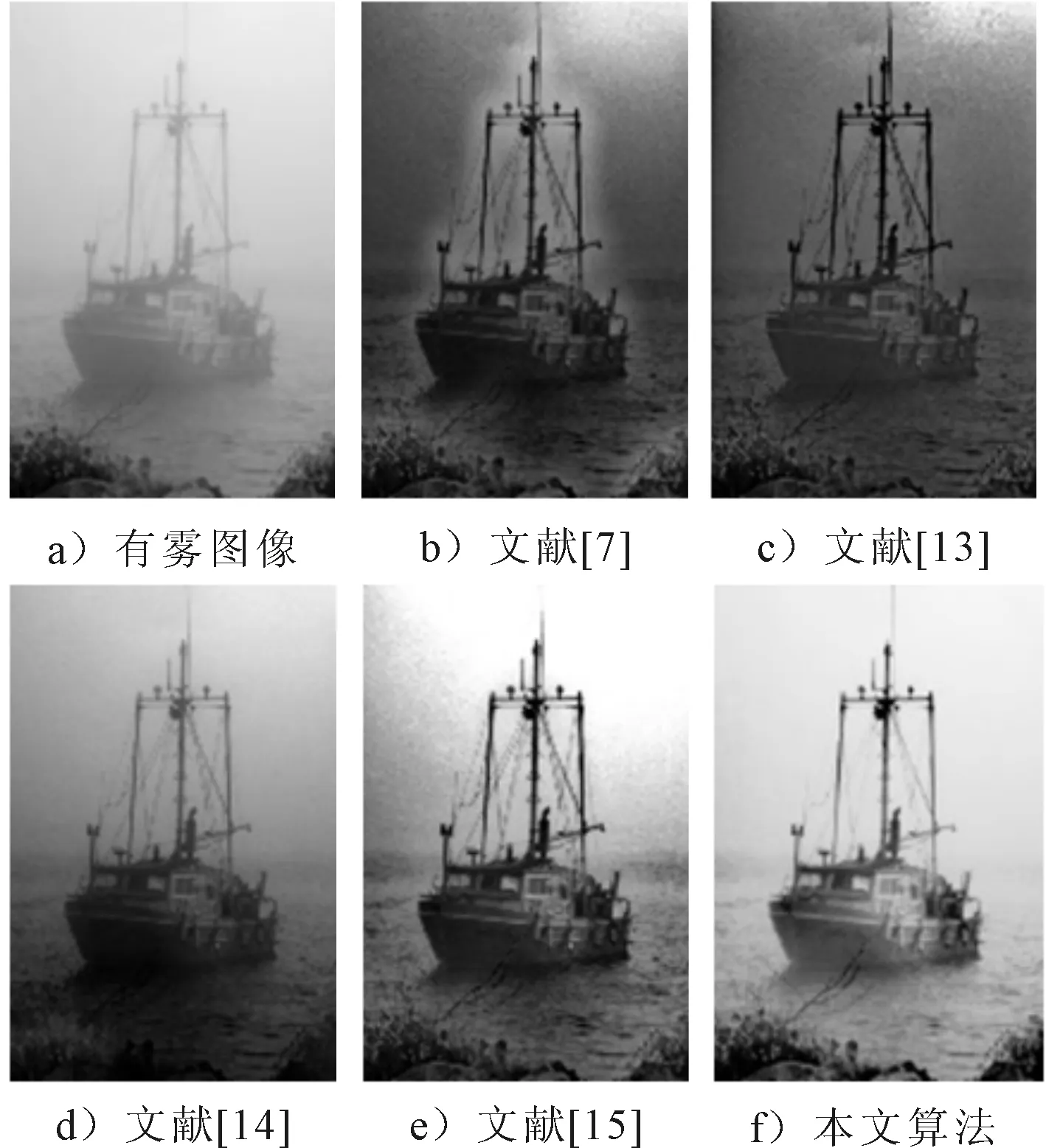
图9 有雾图像及各算法的去雾结果
与针对合成有雾图像得出的结论相类似,文献[7]算法、文献[13]算法和文献[14]算法在去雾后图像的亮度方面依旧存在着过暗的情况,虽然在一定程度上去除了一些雾气的遮蔽效果,但整体可视性过低,不能很好的实现去雾的目的.文献[15]算法的表现要好上一些,图像整体的能见度与对比度都有部分提升,但在图6~7和图9中对于天空上方的处理则显得不够细腻,有些像素点甚至出现了大于255的情况,导致天空区域颜色转变的不够平滑;在图8中,处理后的图像不仅亮度偏暗,且在色彩还原度上出现了一定程度的偏差,使得图像整体效果有所折扣.经本文方法处理后的图像,天空区域的色彩纯正,海面目标轮廓清晰,相较之下拥有最佳的视觉效果经本文算法去雾后的图像在水面以及天空区域均未出现大面积的色彩失真及过饱和处理,视觉效果相对更好,在色调上基本实现了一致.
4 结 束 语
针对海上恶劣的天气环境影响,本文提出了适用于海雾环境下的暗亮双通道协同去雾算法.首先根据暗通道和亮通道先验原理,分别估计出透射率和大气光值,使用快速引导滤波对透射率进行优化,根据阈值判断是否进行透射率失效修正,而后通过大气物理散射模型还原出清晰的图像,最后通过仿真实验对各算法的去雾效果进行对比,并采用PSNR、SSIM等客观指标评价图像质量,验证了本文算法对海上图像去雾的有效性和可靠性,为雾天情况下的智能船舶航行提供了更安全的保证.下一步的研究可以将图像去雾算法拓展为实时的视频图像去雾,并在保证复原图像质量的同时提高运算效率.
猜你喜欢
社会科学战线(2022年1期)2022-02-16
客联(2021年9期)2021-11-07
现代电子技术(2021年1期)2021-01-17
海外文摘·艺术(2020年22期)2020-11-18
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年6期)2018-09-04
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
计算技术与自动化(2017年1期)2017-05-08
岁月(2016年5期)2016-08-13