
Ka数字波束合成⁃合成孔径雷达顺轨干涉性能分析
2021-03-04 04:10吴思利郑世超曾朝阳孙家正冯利鹏
上海航天 2021年1期
吴思利,王 辉,郑世超,曾朝阳,陈 翔,孙家正,冯利鹏
(上海卫星工程研究所,上海 201109)
0 引言
应用多普勒信息的合成孔径雷达(Synthetic Aperture Radar,SAR)不能直接提供目标速度信息。经过合成孔径成像过程,不具有径向速度的静态目标会在方位向上聚焦到零多普勒位置[1],如果直接利用多普勒分析方法得到速度信息则会极大损失频谱进而降低场景分辨率。作为合成孔径原理的重要应用,顺轨干涉SAR 技术能够利用具有时间差的完整分辨率二维相干数据得到场景图像的多普勒偏移,并进一步提取对应的径向速度,已广泛应用到包括洋流测速、地面动目标检测在内的丰富情景中。顺轨干涉(Along-Track Interferometry,ATI)技术由GOLDSTEIN 和ZEBKER 于1987 年提出,并首次在1989 年完成机载实验[2],此后众多机载系统[3]、航天飞机[4]和卫星进行了ATI 实验或业务运行,获得了优于0.2 m/s 的测速效果。对ATI 的理论分析, ROMEISER 分析并建立了ATI-SAR 结合海洋表面流场的成像机理[5];有 学者[6-9]提出了针对调频连续波ATI 系统的残留相位差估计方法以及斜视情况下的精度分析方法等。
根据波束宽度与天线尺寸的对应关系,单通道SAR 的顺轨干涉无法满足高增益和宽幅同时实现,这一点对于弱散射特性目标和大工作视角格外重要。SUESS 等[10]提出面向高分宽幅(High Resolu⁃tion Wide Swath,HRWS)的距离向多通道数字波束合成⁃扫描接收技术(Digital Beam Forming Scan-on-Receive,DBF-SCORE)可以有效解决这一问题。发射天线的距离向孔径决定了单脉冲下的场景大小,减小天线高度获得大的照射面积,再利用多个接收孔径信号波束合成,获得理想的观测幅宽与信噪比。本文分析了DBF-SAR 在顺轨干涉模式下的工作性能与误差影响,通过指标仿真实验验证了系统对宽幅场景的测速效果,弥补了单通道系统对海洋、河流等弱后向散射场景测速精度不高的缺点。
1 设计思路
Ka 波段SAR 系统,其应用波长较短,与传统SAR 系统相比实现相同的幅宽时只需要较小的天线尺寸,具有高分辨率、小型化、轻型化等特点[11-13]。但是由于Ka 波段系统损耗较高,如果采用传统的单发单收工作方式,为满足系统增益要求就需要非常大的峰值发射功率,这在工程实现上非常困难。要想在Ka 波段获取高性能的实时处理,需要从多通道技术上寻找新的突破。
数字波束形成-扫描接收技术在发射端用一个小尺寸天线照射整个幅宽,如图1 所示,接收端采用多通道接收天线等效获得一个高增益窄波束依快时间沿距离向扫描,可以有效提高系统增益,获得更低的距离模糊、更高的信噪比和更好的辐射分辨率,同时大幅度减小了数据下传量。相比于单发单收系统,基于数字波束合成(Digital Beam Form⁃ing,DBF)的Ka 波段SAR 系统对天线功率密度和硬件的要求降低,有利于降低成本,缩短研发周期,实现小型化。

图1 距离向多通道合成结构Fig.1 Structure of multi-channel DBF in range
忽略慢时间,只考虑快时间t、孔径n接收信号sn(t)、加权系数ωn(t)、接收波束中心方向θ(t)、天线法线方向β、单通道距离向孔径长度d,总的信号为各通道信号之和:

在t时刻(如图2 所示),波束指向α(t)=θ(t)-β。快时间对应的接收波束方向为理论波达角方向:

式中:Re为地球半径;c为光速。
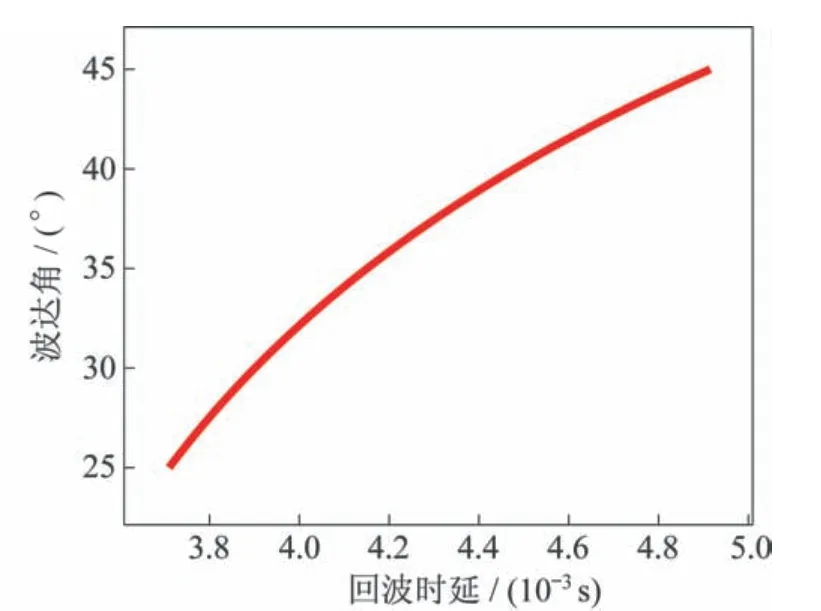
图2 时变波达角Fig.2 Time-variant direction of arrival
弥补不同通道传播历程相位差的加权系数ωn(t)为

式中:λ为波长天线;dn为第n个接收通道相对天线中心的距离,

加权求和就相当于形成一个时变的高增益窄波束在一个脉冲重复周期内扫描整个测绘带,跟踪接收地面回波。通过DBF 过程,理想均衡通道回波信号经过相干累加,而随机噪声期望不变,理论信噪比改善可以达到10 log10N。
在单通道原始回波信噪比为20 dB 下,多通道合成前后接收天线方向图等效示意图如图3 所示,多通道合成与否脉冲压缩信号信噪比改善情况示意图如图4 所示,信噪比改善值接近6 dB,符合理论计算。
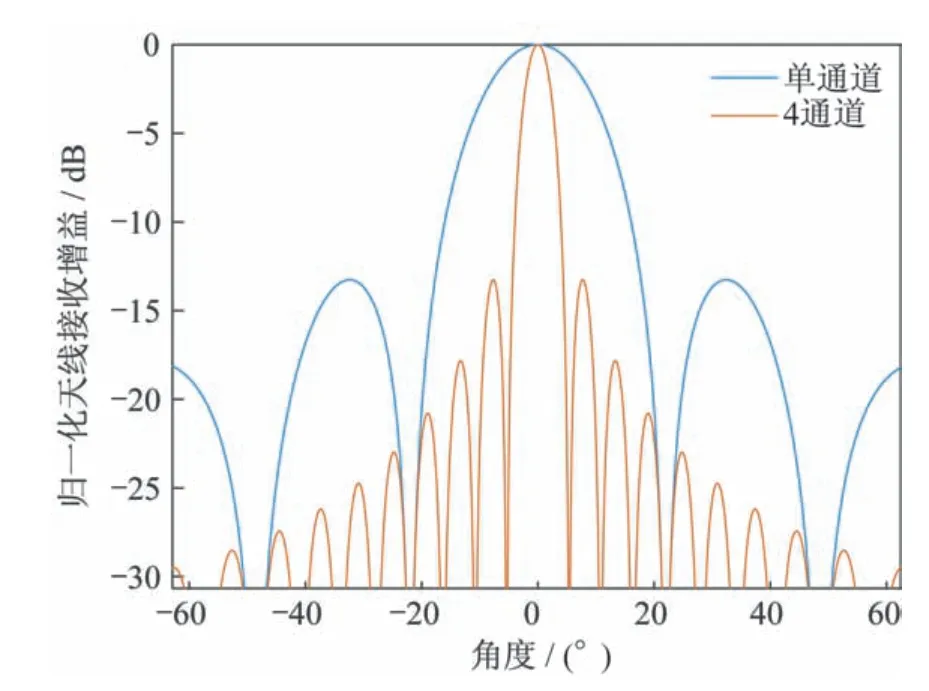
图3 DBF 接收前后增益Fig.3 Receive-gain before and after DBF
2 目标特性分析
如图5 所示,假设雷达平台具有飞行高度H和速度Vp,配备顺轨分布接收天线两组并且相位中心A1和A2间距沿航迹长B,分别在距离向上具有多个接收通道。设定坐标系xyz分别对应顺轨、交轨和高度向。
目标相对雷达位置位于入射角θ、斜距r0处,并具有三向速度(vx,vy,vz),可以得到目标径向速度vr为

在理想情况下,目标由速度带来的干涉相位φv为

ATI 模糊速度是带来2π rad 干涉相位的目标速度:

式中:B为基线长度;Vp为雷达平台运动速度。
系统理论上能不模糊观测的速度范围为-vamb/2 <vr<vamb/2。
对沿航迹干涉性能的主要限制因素进行表述,并量化分析对于DBF-SAR 的影响。干涉流程之前需要分别成像,得到两幅聚焦图像。
1)沿航迹速度。如果速度分量vx大到不匹配方位向参考方程φa,目标就会在方位向上散焦。使用二阶近似,φa为

式中:ta为方位时间。
忽略径向速度分量,目标的相位历程为

则在合成孔径末端的残余相位为

式中:Ta为合成孔径时间,等于。因为飞行载具速度远大于地面目标速度,如在800 km 轨道高度卫星平台运动速度可超过7 000 m/s,存在Vp≫vx。要求φr小于π/2,得到对沿航迹速度约束|vx| ≤。
2)垂直航迹速度。目标的径向速度vr也会引起图像散焦,并且在相位历程上会附加额外的线性项,进而改变多普勒中心频率,引起动目标方位向频谱与杂波的分离。用QDop表示目标方位向频谱的偏移量:

目标带宽只有1-QDop的部分会被处理,所以方位向分辨率会以系数1/(1-QDop)降低,目标单像素的信噪比会以系数(1-QDop)2降低。
3)距离徙动。由于径向速度带来的额外距离徙动也会造成动目标在距离向上散焦,当目标的方位频谱相对于PRF 混叠,相邻脉冲间未补偿的距离徙动量Δρn为
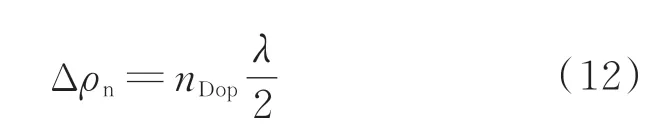
式中:nDop为目标多普勒,相对于处理器多普勒偏移量PRF的整数倍。在合成孔径时间内的总额外距离徙动为

因此,快速目标会难以识别。
3 DBF⁃ATI 性能分析
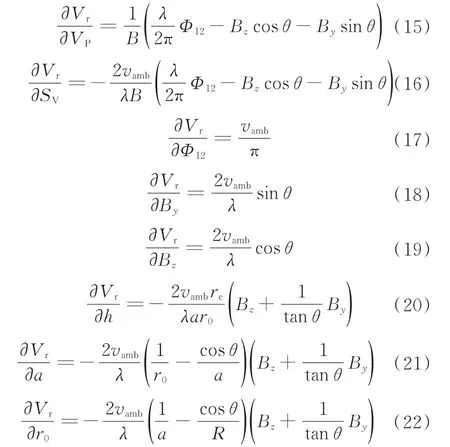
径向测速精度可以通过微分得到误差子项贡献量,其平方和即可表征整体干涉测速能力[14]。定义xyz坐标系下x轴航向的一发多收DBF-ATI 系统,A1和A2表述顺轨两组多通道接收天线且具有沿航向基线B,a为轨道高度H与地球半径之和,θ为对目标点观测下视角。测速精度为
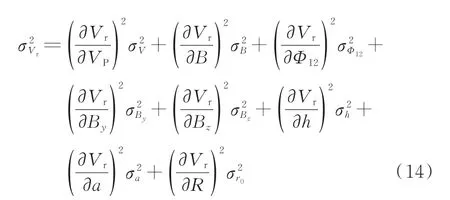
式中:误差源σVP、σB、σΦ12、σBy、σBz、σh、σa、σr0分别为飞行器速度、沿航迹基线长度、干涉相位、基线y轴、基线z轴、观测场景高度、轨道高度以及观测斜距的测量不确定性,各误差贡献因子分别为
在多视数为NL时,干涉相位[15]可以表示为

式 中:s1、s2分别为A1和A2多通道 合成后 单视复信号。
干涉相位标准差是相干系数γ的函数,为

总相干系数可以表述为子相干系数乘积:

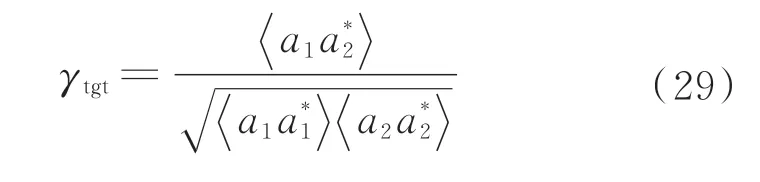
式中:γtgt、γdop、γpro、γasr分别为目标信噪比相干系数、空间相干系数、多普勒相干系数、处理相干系数、模糊相干系数。其中,目标信噪受到距离向多通道影响较大,主要有通道固定相位误差、空间去相干、波束指向误差和波达角误差4 种因素降低信噪比,影响合成信号质量,进而降低顺轨干涉效果。
考虑同场景SAR 顺轨图像组,对应分辨单元图像值a1和a2分别为

式中:s1和s2为目标信号;n1和n2为应噪声分量。并且,具有相差φv,
在理想条件下对两组顺轨接收通道完全一致,n1和n2为独立噪声,则对于该分辨单元的相干系数为
去除非相关交叉项后得到

化简为
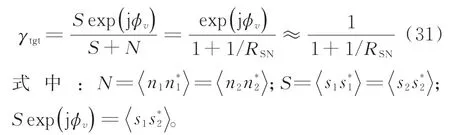
热噪是非相干噪声的主要元素。在实际应用时,多通道合成存在多种误差形式,以及固有的去相干效应主要存在固定相位误差、波达角估计误差以及通道固有空间分布带来的去相干。雷达截面积能够表征观测目标的可探测性,在SAR 常用的观测入射角30°下,水面一类场景的归一化雷达截面积会比陆地场景弱至少30 dB。定义雷达回波中观测目标的雷达截面积为σtgt,雷达系统的等效后向散射系数为σ0,则得到取对数的沿视角目标信噪比为

1)通道固定相位误差。设第n个通道信号回波信号,经过快时间补偿后为不再受回波视角调制:
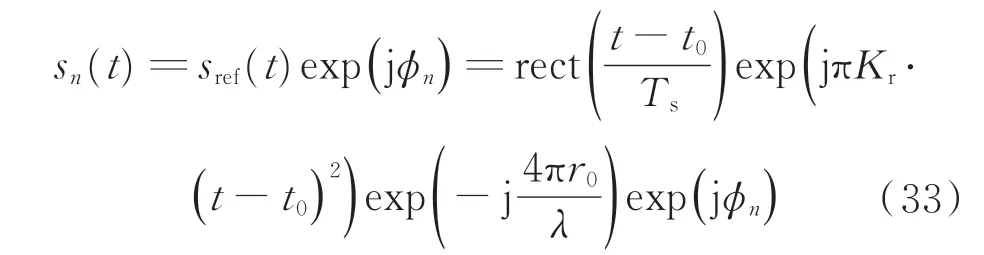
式中:sref(t)为参考通道信号;φn为各通道相对于参考通道的残余固定相位误差;Kr、t0为斜距r0双程时延,则求和就能得到DBF 合成信号为

可以发现,DBF 接收系统的各通道信号存在固定相位误差时,不会直接影响单通道脉冲压缩带来的能量累积,但多通道合成后会在每个对应距离单元形成对消。定义固定相位增益损耗为

2)波达角估计误差。实际在地面具有高度起伏时,通过理想平地地球几何获取波达角,估计具有不可忽略的误差,定义SCORE 法指向的方向为θs(t),真实具有高程h的目标回波方向为θ0,则角估计误差为

式中:t0为回波真实双程时延,造成回波并没有按照理想状态被多通道合成最大增益接收,而是因为地形带来了增益损失;G0为接收天线等效方向图,定义损失量为

如图6 所示,3 000 m 的地形高度误差就能引起近端0.6°以上的波达角估计误差,并相应地引起5 dB 的增益损失。
3)空间去相干。在理想航迹下,通常可以忽略沿航迹干涉系统下空间去相干的影响,但对于多通道系统,由于距离向多通道带来的入射角差异,会造成雷达回波固有的信号差异,降低在空间尺度上的相干性。参考交轨干涉空间去相干系数[16],定义多通道下空间基线增益损失:

式中:ρy为距离分辨率,则通道间最大视角差异δθ约为。
则DBF-SAR 图像信噪比为

4 通道误差影响及仿真分析
系统参数见表1,分析多通道合成对ATI 测速性能影响。
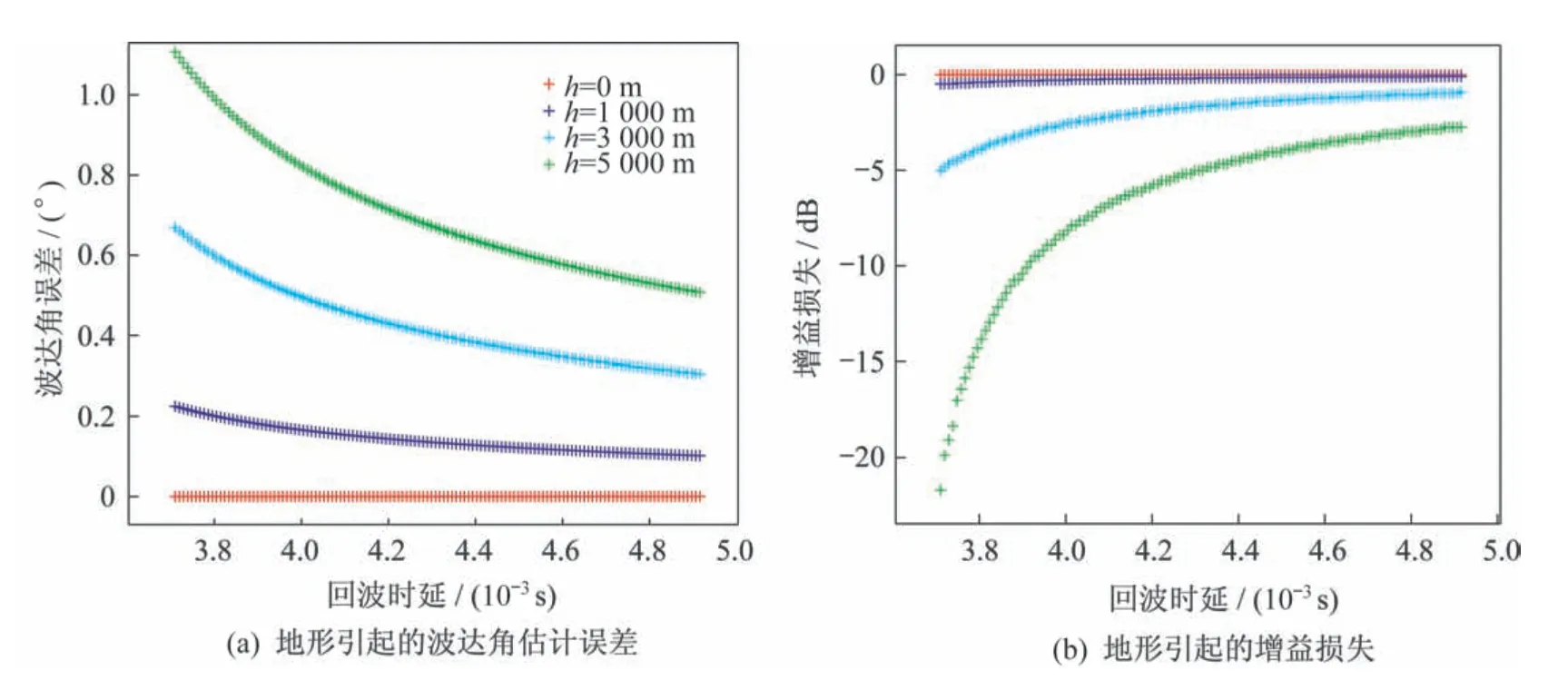
图6 地形对DBF 性能的影响Fig.6 The influence of topography on DBF performance
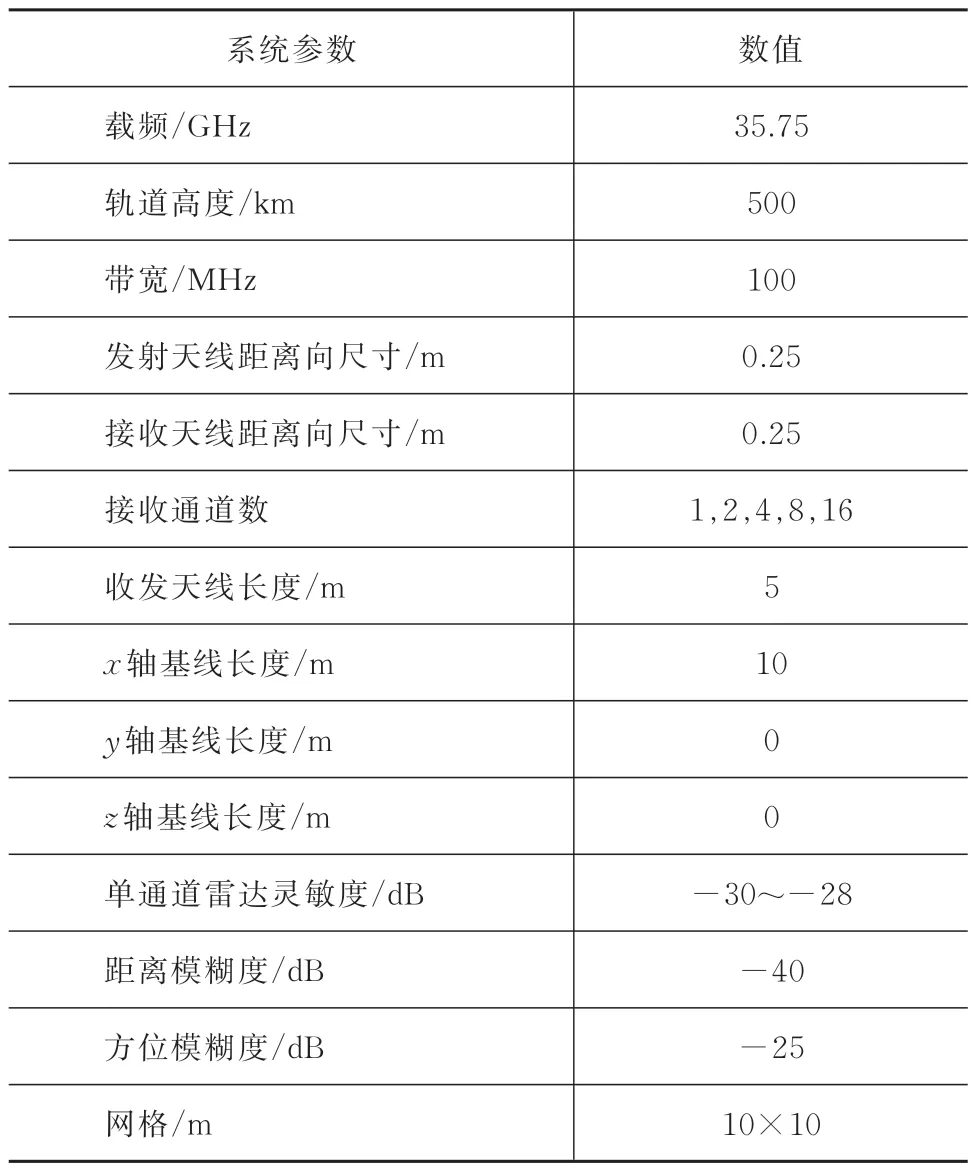
表1 仿真输入Tab.1 Simulation inputs
应用多通道合成后,干涉图像对相干系数能够获得有效的提升。通过图7 的单视仿真结果,可以得到雷达系统单通道数据在目标归一化散射截面积小于-20 dB 时相干系数会低于0.5,而此时四通道系统对应值可以达到0.67。目标归一化散射截面积大于-10 dB 时,多通道相干系数提升极限小于0.1。

图7 通道理想合成后相干系数Fig.7 Correlation coefficient by ideal multi-channels DBF
误差源配置见表2,仿真得到多通道理想情况下的测速性能如图8 所示。在当前误差分配下,可以发现干涉相位误差为主要误差量,单通道地距700 km 处误差源贡献量主要有相位误差贡献0.1 m/s、z轴基线误差贡献 量0.05 m/s、y轴基线误差贡献量0.05 m/s。
理想测速性能如图9 所示。由图9 可见:在地面弱散射场景下,幅宽内单通道近端精度大于0.4 m/s;16 通道合成后,近端精度0.16 m/s 有效改善了分米级精度。强散射场景下,多通道测速精度集中在0.15 m/s 左右。

表2 误差源输入Tab.2 Error source inputs

图8 测速误差贡献量Fig.8 Error contributions to velocity measurement
以不同的地面高程以及通道间最大相位误差15°下进行试验,并考虑空间去相干可以得到如图10所示的多通道合成后ATI 测速精度。可以发现在地距较小时,高程误差会严重影响测速精度,并且可能会出现实际系统性能不如单通道的情况。同理,当通道间相位差过大,如150°时会发生性能不如单通道的情况。
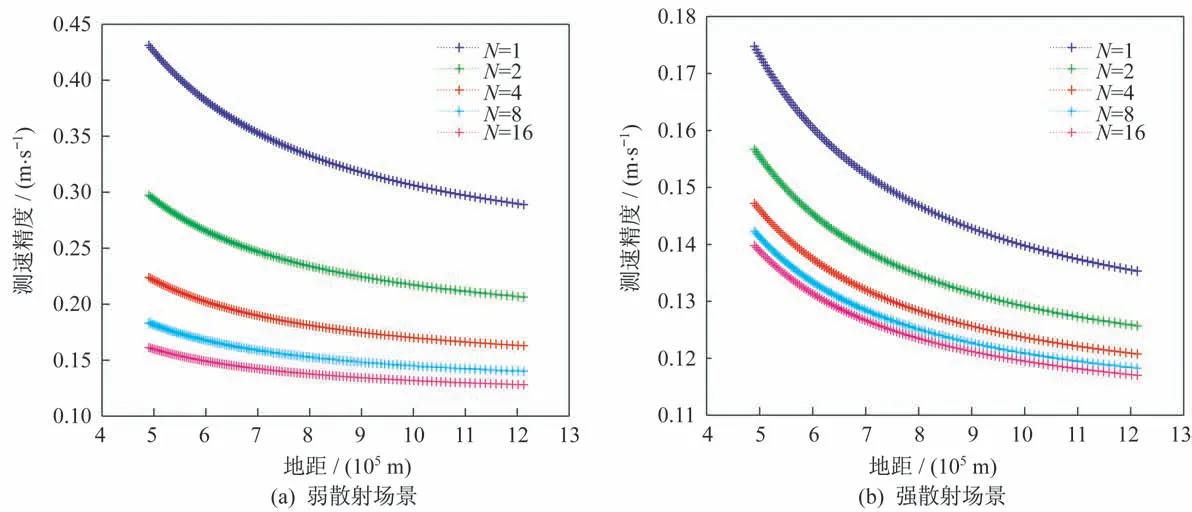
图9 理想测速性能Fig.9 Ideal performance of velocity measurement

图10 非理想情景测速性能Fig.10 Non-ideal performance of velocity measurement
容易得出结论,DBF-SAR 面对弱后向散射场景可以提升系统的干涉测量性能。在具体实现方面,对多通道雷达系统相位误差进行实时或者后处理可以有效提高大多数情况下的系统顺轨干涉性能。同时对于复杂地形环境,有必要进行基于自适应或者基于外部数字高程模型(Digital Elevation Model,DEM)数据的波达角估计,完成高精确度的快时间权校正。
5 结束语
作为顺轨干涉应用的有效提升手段,通过距离向多通道SAR 系统可以改善回波增益,进而改善干涉相位质量,提升测速能力。本文考虑了包括DBF-SCORE 原理、动目标特性以及顺轨干涉精度分析在内的定量分析,并对多通道系统相位一致性、波达角估计以及空间去相干对合成后干涉效能的影响进行了讨论及仿真,为未来高分宽幅ATI 系统提供参考意义。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
现代仪器与医疗(2022年1期)2022-04-19
舰船电子对抗(2021年2期)2021-06-16
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
电子技术与软件工程(2017年23期)2018-01-17
中国科技纵横(2017年15期)2017-09-09
科技传播(2017年2期)2017-04-06
科技视界(2016年11期)2016-05-23
现代电子技术(2015年17期)2015-09-23
