油动变距无人机齿轮箱系统动力学分析
2021-02-28 06:49广东电网能源发展有限公司广东电网有限责任公司张宝星吴伟智
电子世界 2021年22期
广东电网能源发展有限公司 广东电网有限责任公司 杨 先 张宝星 吴伟智 曾 志 秦 理
动力传动系统是油动旋翼变距无人机的关键动部件之一,其作用是将发动机的功率和转速按一定的比例传送到旋翼和所需的附件上。动力传动系统的好坏,将直接决定油动旋翼机的性能和可靠性。针对油动变距无人机在飞行中遇到的风载荷多变以及不稳定性,为提升油动变距无人机中齿轮箱的可靠性和安全性,采用有限元方法,基于Ansys workbench对齿轮箱中齿轮的动力学进行了分析与研究。
飞行器从起飞、航行到降落的过程中,将涉及到不同的载荷。一是永久载荷,例如飞行器的机架重量载荷,在不对飞行器机架进行改装时,机架的质量将不会发生变化。二是可变载荷,飞行器可变载荷的变化幅度较大,主要取决于飞行器载重物体的重量。三是偶然载荷,飞行器在空中飞行时,会遇到不同的风载荷工况,存在不确定性。一般而言,齿轮箱在油动变距无人机的工作环境下较为恶劣,其设计也更为复杂。如果齿轮箱的设计在结构上存在接触不合理,极有可能导致螺旋桨的旋转变距和发动机产生共振,导致产品的损坏,从而影响飞行器的飞行性能以及飞行安全。弧齿锥齿轮是目前应用最为广泛的轴相交运动机械构件,弧齿锥齿轮的耐化学和防腐蚀性强,具有传动平稳、噪音低、重量轻、减震性能好、高负荷承载能力强和可靠性高的优点。在油动变距无人机的齿轮箱系统中,弧齿锥齿轮副是齿轮箱中最重要的零部件,其常常要应对不同风荷载的影响,以及发动机不同转速带来的变化,因此需要保证弧齿锥齿轮具有较高的机械强度;同时,还要保证齿轮副啮合之间的动态应力符合要求,防止油动变距无人机在空中飞行时,齿轮副发生磨损和错位等损坏而导致的不稳定因素,将影响油动变距无人机的安全降落。使用有限元方法对弧齿锥齿轮进行动态特性分析,对提高齿轮啮合传动的连续性和可靠性具有重要的意义。
本文作者基于Ansys Workbench对油动变距无人机齿轮箱中弧齿锥齿轮进行动力学仿真分析,得到齿轮在动态啮合过程中的受力情况,为实际模型提供参考。
1 弧齿锥齿轮有限元模型的构建
1.1 弧齿锥齿轮三维模型的的建立
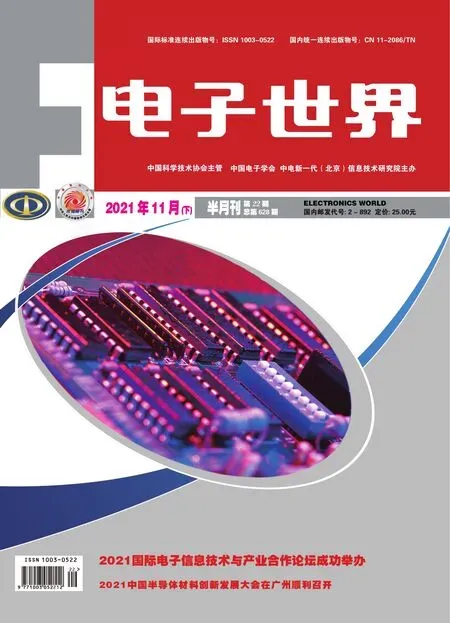
油动变距无人机齿轮箱采用的是弧齿锥齿轮传动,在Solid-Works软件中建立弧齿锥齿轮的三维模型,其详细参数如表1所示。
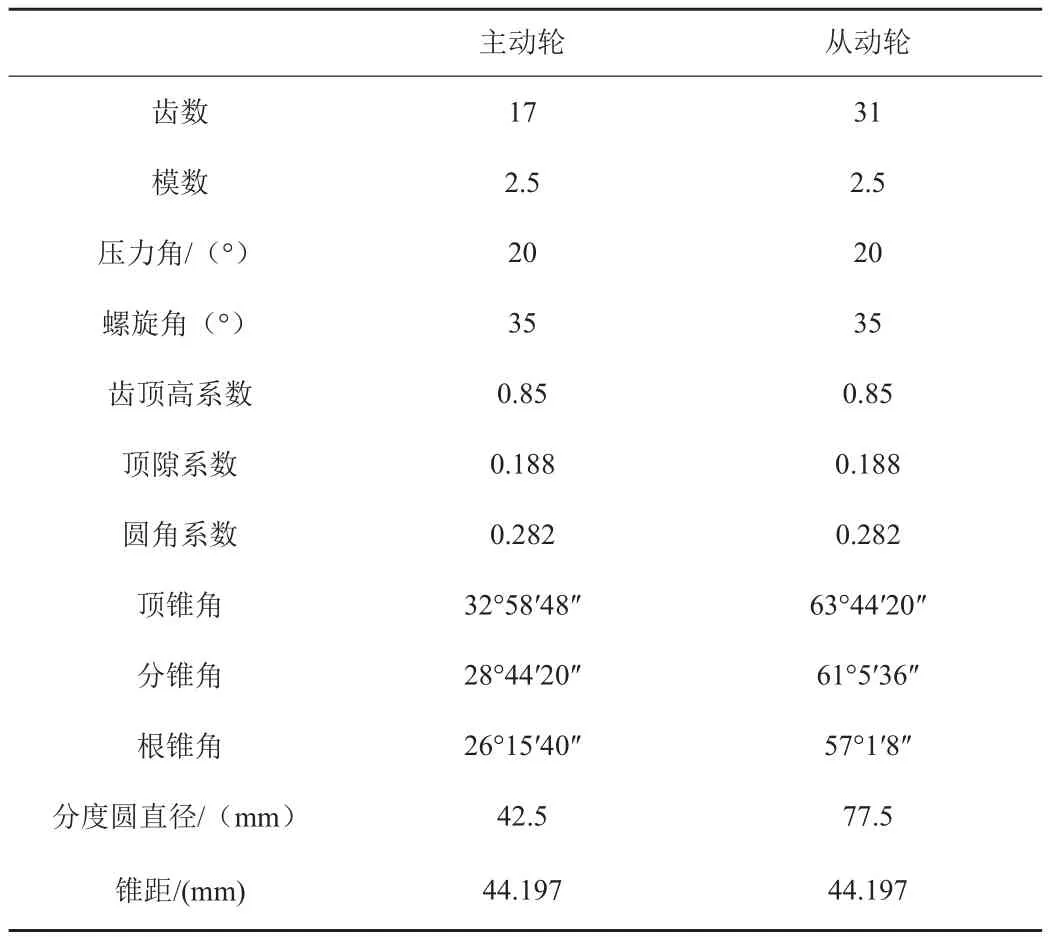
表1 弧齿锥齿轮参数
对某型飞行器齿轮箱的弧齿锥齿轮副进行三维建模,并完成模型整体的装配,主动轮如图1所示,从动轮如图2所示。为了简化计算,在此只取齿轮箱里面的齿轮副,其装配体装配图如图3所示。

图1 主动轮弧齿锥齿轮(小齿轮)
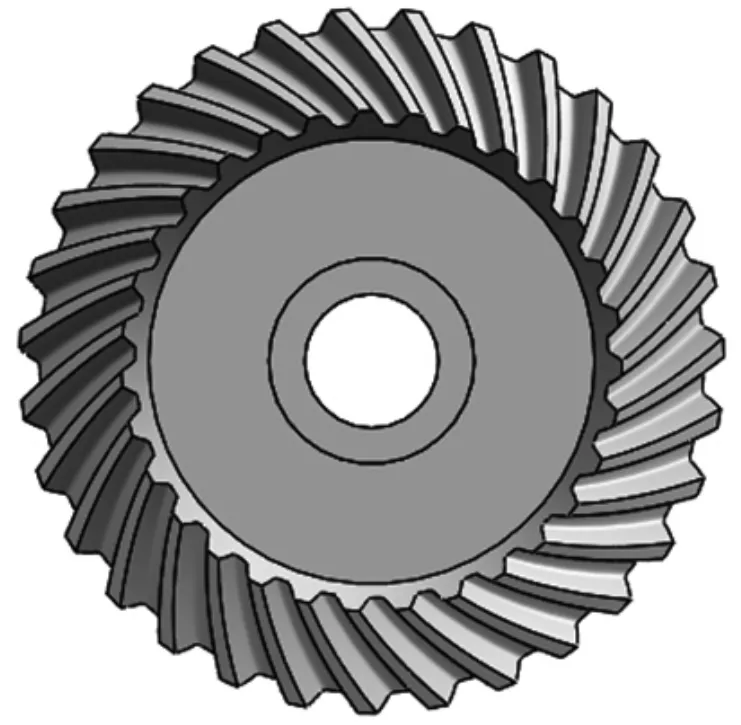
图2 从动轮弧齿锥齿轮(大齿轮)
图3 装配图
1.2 有限元模型的建立
为了计算简便,对主动轮和从动轮去除对结构影响不大的圆角。根据模型尺寸大小,采用1.5mm网格划分,为了使接触分析更加精确,对接触区域面的网格进行细化,并采用0.6mm网格划分,使用solid187单元,共划分300408个单元和470788个节点。划分完成后的网格模型如图4所示。
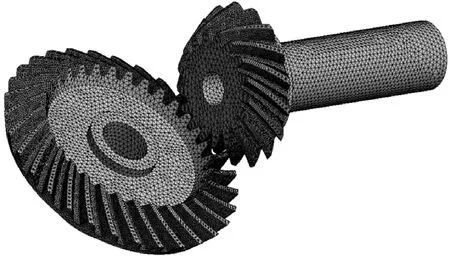
图4 弧齿锥齿轮副有限元网格模型
2 弧齿锥齿轮静力学分析
将弧齿锥齿轮三维模型导入Ansys Workbench中,对弧齿锥齿轮进行静力分析。齿轮副采用面接触方式,其中主动轮为目标面,从动轮为接触面。摩擦参数为0.1,并对齿轮副模型赋予材料属性。弧齿锥齿轮副材料为42CrMoA合金结构钢,材料参数如表2所示。

表2 材料参数
扭矩跟发动机的功率以及转速有关,其转换的公式为:
式(1)中,T为扭矩,P为功率,n为转速。发动机转速为6000r/min,功率取最大功率值,为14.9kw,发动机输出的扭矩为23.7N.m,经过1:3.2转速比后,主动轮的转速为1875r/min,输入的扭矩为75.84N.m,在经过1:1.8的二级弧齿锥齿轮减速,则从动轮的输出扭矩为151.68N.m。
设置相关的链接关系,并求解。由图5和图6,弧齿锥齿轮的最大等效应力为410.88MPa,齿轮的接触应力小于42CrMoA合金结构钢的许用应力值,为930Mpa,结果表明,齿轮副系统满足静强度设计要求。

图5 弧齿锥齿轮静力分析1
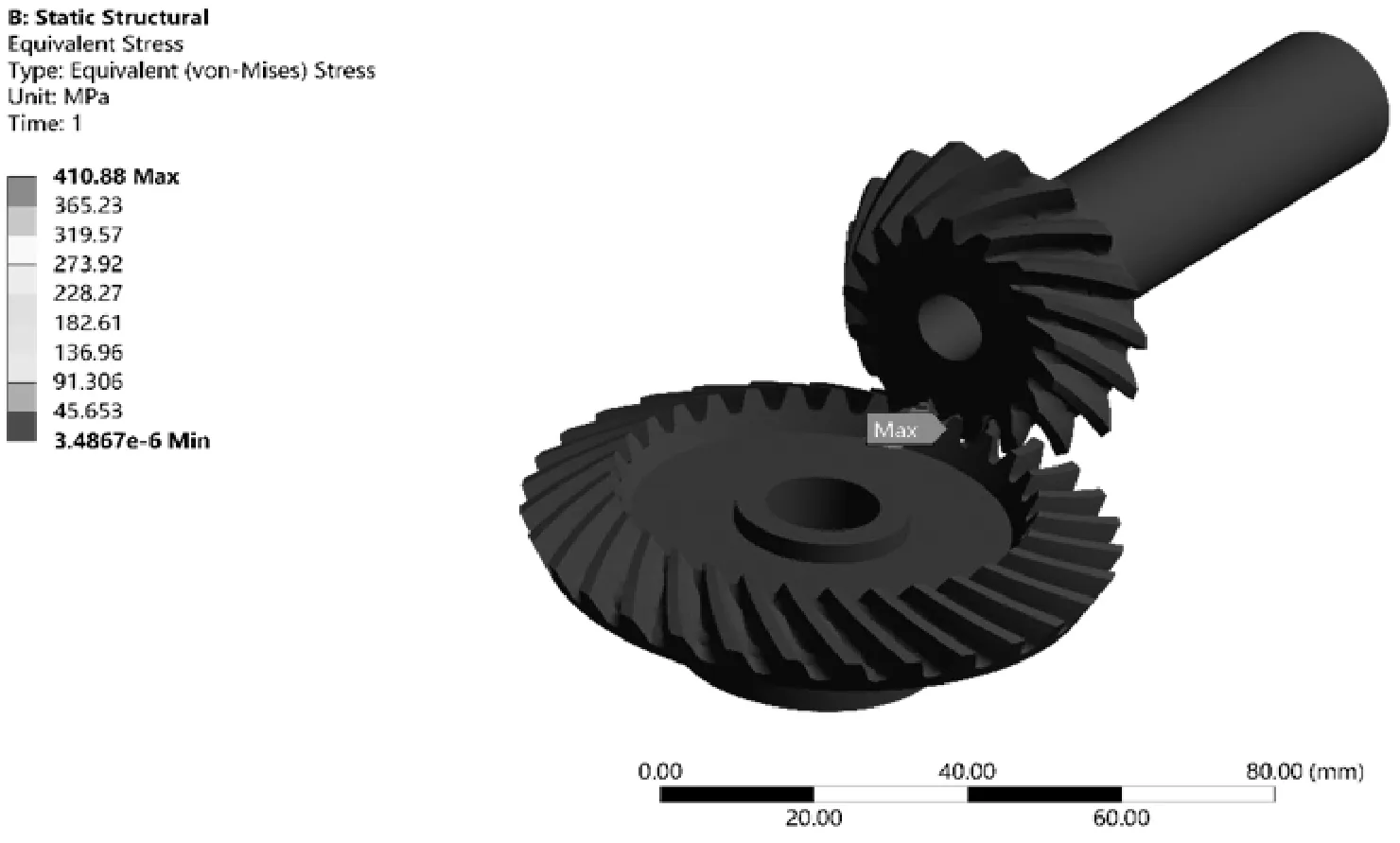
图6 弧齿锥齿轮静力分析2
3 弧齿锥齿轮瞬态动力学分析
动力学分析不同于静力学分析,前者具有时变性,且需要考虑惯性力,后者只有一个单一的解。动力学是用来确定惯性(质量效应)和阻尼引起重要作用时结构或构件动力学特性的技术。动力学分析主要有模态分析、谐响应分析、瞬态动力学分析、谱分析等。
本文基于Ansys Workbench有限元分析软件,对弧齿锥齿轮系统进行动力学分析。并通过有限元软件,对弧齿锥齿轮分析过程中的应力大小进行提取。设置小齿轮为主动轮,摩擦系数设置为0.1,主动轮转速设置为1875r/min。从动轮扭矩设置为151.68N.m,分析出齿轮在运动过程当中的啮合应力情况,如图7所示,为某一时刻的弧齿锥齿轮等效应力云图。如图8所示,为弧齿锥齿轮的应力时变曲线。通过对齿轮的各个时刻应力云图进行分析,弧齿锥齿轮的应力最大值在831.74MPa,满足设计930MPa强度要求。
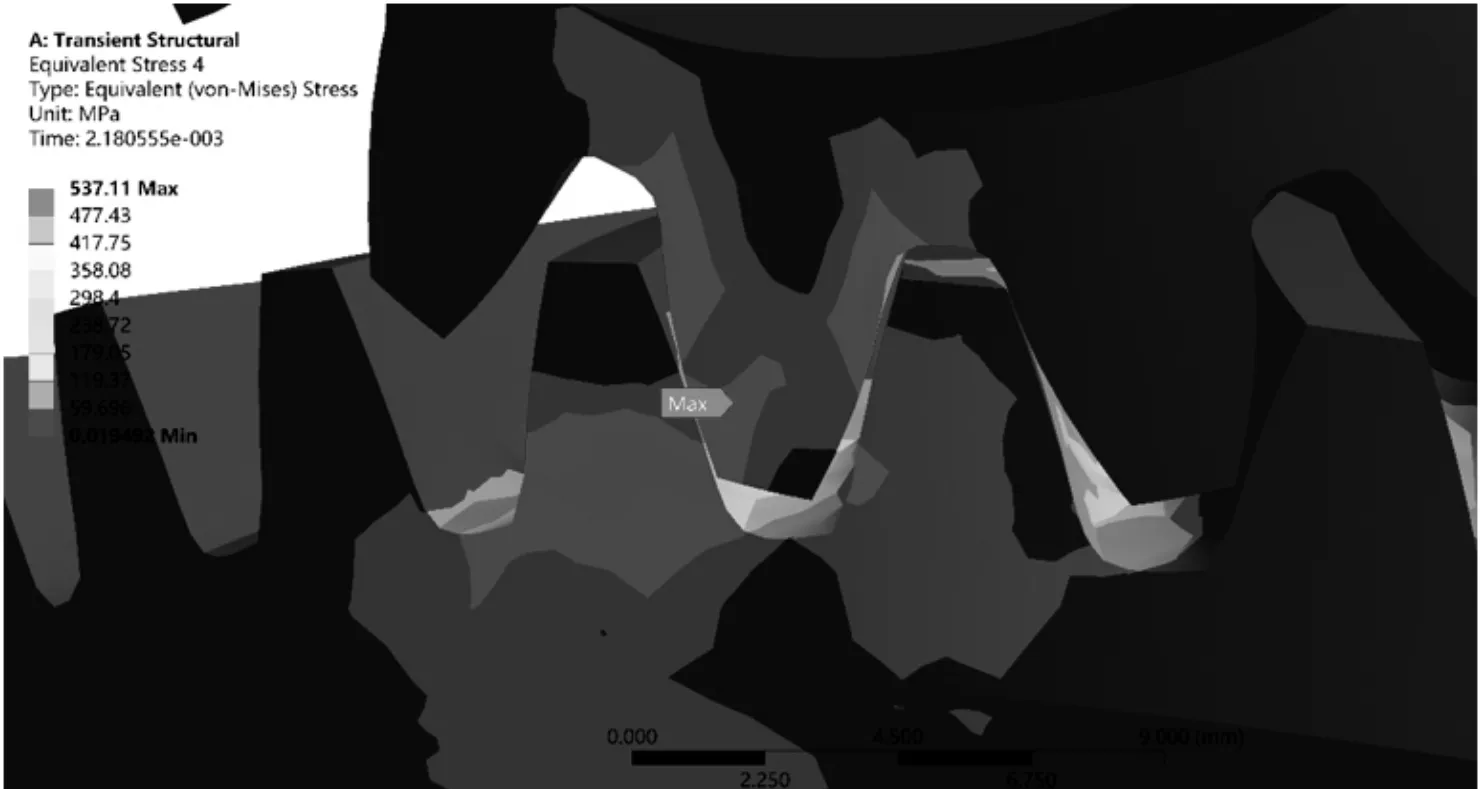
图7 弧齿锥齿轮瞬态动力学分析
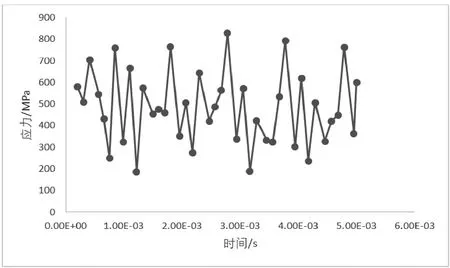
图8 弧齿锥齿轮时变曲线图
结语:建立了齿轮箱中弧齿锥齿轮副的完整齿轮系统的动态分析模型,应用有限元数值分析方法,对弧齿锥齿轮系统进行了静力学分析和动力学分析,结果表明,油动变距无人机齿轮箱中的弧齿锥齿轮副满足结构强度要求,为油动变距无人机设计提供了一定的理论参考依据,同时为油动变距无人机齿轮箱的优化设计提供了参考。
猜你喜欢
橡塑技术与装备(2021年17期)2021-09-04
绿色科技(2019年22期)2019-12-30
高考·上(2019年1期)2019-09-10
制造技术与机床(2019年8期)2019-09-03
振动与冲击(2019年3期)2019-02-21
山东冶金(2018年5期)2018-11-22
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年6期)2016-11-07
西南交通大学学报(2016年6期)2016-05-04
制造技术与机床(2015年10期)2015-04-09