
基于惯性测量系统的轨道几何形位测量机械
2021-02-28 09:34:58
现代城市轨道交通 2021年2期
奥地利System7 railsupport GmbH公司(以下简称“System7公司”)将轨道几何形位惯性测量系统集成到其生产的通用捣固机4.0中,用于在捣固作业过程中进行轨道几何形位参数测量。该公司在奥地利联邦铁路公司(ÖBB)所辖线路网络中选取了一条符合关于轨道高低、轨向标准偏差规定的试验线路对该系统进行测试。ÖBB的专业技术人员参与此次测试,并由第三方评估机构检查该系统的重复性和再现性。各次行车试验所测得的结果无重大偏差,均未超出限值,从而证明安装在通用捣固机4.0上的惯性测量系统适用于对轨道进行验收测量。
1 背景
对于轨道建设和维护作业,在完成后必须对其是否符合合同规定(执行质量和执行数量)进行检查,即验收检查。欧洲统一遵循的轨道基础设施工程验收测量标准为《铁路设施-轨道-工程验收-第1部分:有砟轨道作业》(EN 13231-1-2013)。
由于大多数轨道作业都会对轨道几何形位产生直接影响,因此在将轨道重新投入常规运营之前,必须对其几何形位进行验收测量,包括轨向、高低、水平、三角坑、轨距等参数。测量精度对于铁路运输的安全性、舒适性及轨道几何形位的可持续性至关重要。这项任务由轨道检测车或轨道施工与维护机械承担。其中,轨道检测车应符合《铁路设施-轨道-轨道几何质量-第2部分:测量系统-轨道检测车》(EN 13848-2-2006)的规定,轨道施工与维护机械应符合《铁路设施-轨道-轨道几何质量-第3部分:测量系统-轨道施工与维护机械》(EN 13848-3-2009)的规定。
为此,System7公司开发了新型通用捣固机4.0(属于轨道施工与维护机械),其创新点是装配了轨道几何形位惯性测量系统,以便在作业过程中对轨道进行验收测量。该机械已获得《铁路设施-轨道-轨道施工与维护机械-第2部分:工作技术要求》(EN 14033-2-2008)所规定的技术操作许可证,并满足标准EN 13848-3-2009规定的精度要求。为确保在施工过程中获得可靠的测量结果,System7公司必须对其进行重复性和再现性相关的测试。
2 试验线路和试验实施要求
试验线路的几何形位必须符合EN 13848-3-2009的规定,具体如表1所示。

表1 EN 13848-3-2009对于测试线路几何形位的要求
试验行车时,试验机械必须以极低的速度(1 km/h)在最短500 m的线路区段上往返多次。为避免长时间的线路锁闭,试验机械还应该能够在试验点附近折返。为此,System7公司经过大量研究,最终决定在林茨(Linz)地区的ÖBB线路区段上进行试验行车,如图1所示。

图1 选择的试验区段(红色圆圈内区域)和折返区域(绿色三角)
在捣固作业前,ÖBB首先通过比较轨道几何形位实际值与目标值确定轨道几何形位校正数据,此过程称为预测量,由ÖBB的iGleisgeometrie中央数据库实施。该数据库存储了轨道几何形位的目标值、参考值、测量值等数据,可对由不同测量系统和轨道施工机械生成的测量数据与目标值进行比较。然后,应检查所有线路参数是否符合标准的规定,以确保捣固机能够根据校正数据塑造规定的轨道几何形位。在随后的捣固过程中,捣固机将轨道几何形位测量数据传输到iGleisgeometrie中央数据库,以便进一步存储和分析。在ÖBB专家进行最终的质量检查后,验收完成。所有捣固作业的情况及质量(即实际值与目标值的偏差)都可以通过这种方式检测和记录。
3 惯性测量系统
目前,安装在轨道施工和维护机械中的测量系统通常使用物理摆测量轨道水平,使用单弦测量系统测量轨向和高低。单弦测量系统可测量出轨道在尺寸、形状和位置上的变化。其由前后2辆张拉小车及中间1辆测量小车组成,小车之间连接测量钢弦,钢弦长度通常为10 m,由中间测量小车分为5 m:5 m(对称弦)或者4 m:6 m(非对称弦)的2段。中间测量小车安装电位计传感器,用于扫描钢弦位置。根据钢弦的纵向高度和测得的水平,可计算出轨道的高低。利用曲线正矢计算公式可计算出钢弦在曲线处与钢轨的距离:

式(1)中,a为钢弦较短部分的长度;b为钢弦较长部分的长度;R为线路曲线半径;f为曲线正矢。
单弦测量系统在实际使用时存在以下缺点。
(1)用物理摆测量轨道水平会使测量速度受到限制。车辆快速运行时产生的离心力会使物理摆偏斜,从而导致测量结果失真。为保证物理摆测量结果具有足够的精度,必须将测量速度控制在3 km/h左右。
(2)单弦测量系统的测量结果会因为轨道不平顺波长不同而有差异(轨道维护作业验收涉及的轨道不平顺波长为3~25 m,Dl波段)。上述现象可利用传递函数描述。图2中的传递函数分别展示了对称弦和非对称弦测出的轨道不平顺强度增强和相位偏移。对称弦在不同的轨道不平顺波长情况下均未测出相位偏移。但其测出的不平顺增强数值为0~2.0,0在不平顺波长为5 m时测得,2.0在10 m时测得。

图2 对称弦和非对称弦传递函数
采用System7公司生产的、安装有惯性测量系统的通用捣固机4.0可将测量速度提升到最高30 km/h。惯性测量系统由3台光纤陀螺仪(FOG)和3台精密测斜仪组成,可精确测量目标波长范围内的轨道几何形位偏差。在开机后,该系统首先利用短暂的初始化过程(2~3 min)确定重心轴(z轴)的位置,并通过陀螺仪测量确定北向(x轴),从而得出与该2轴正交的y轴;随后用10 s的时间进行自动校准。加速度计与惯性测量系统配合使用可测量立体角。
为精确确定在特定轨道不平顺波长范围内(波长为25~70 m的D1波段或D2波段)的实际轨道缺陷,该系统会对测量数据进行滤波,并通过对曲线长度进行简单积分计算出线路的空间曲线。该空间曲线在xy平面上的投影可生成线路平面图,而在yz平面上的投影可生成线路纵断面图。以往通过钢弦测量出的曲线正矢和轨道高低便可由线路平面图和纵断面图计算得出。
该系统具有2对轮对,左侧轮对固定在车架上,右侧轮对设计为可旋转,并采用1台高分辨率的绝对值编码器测量旋转角度。这样可以使捣固机适应轨道的三角坑缺陷。导航系统位于捣固机控制台的中间。为使捣固机能够自如地在轨道上运行,其必须具有5个自由度,即3个旋转自由度和2个位移自由度。旋转自由度对应方向角、倾斜角和超高角,位移自由度对应捣固机的垂直行程和横向位移,如图3所示。旋转通过万向球接头实现,横向位移通过水平线性滑块实现,垂直运动则由导向柱实现。
为使捣固机车轮能够精确沿着曲线外侧钢轨滚动,通过横向力气缸对车轮施加压力,使其紧贴钢轨。捣固机的垂直气缸会同时施加向下的压力,以确保捣固机不脱轨。为保证捣固机的功能正常,必须满足以下2个条件。
(1)防滑移条件:水平力必须大于摩擦力。

(2)防脱轨条件:垂向力必须能够防止车轮轮缘爬上轨面。

式(2)~式(3)中,Y为横向力;Q为车轮支承力;μ为轮轨摩擦系数;m为捣固机质量;g为重力加速度;FV为垂向力;FH为水平力。
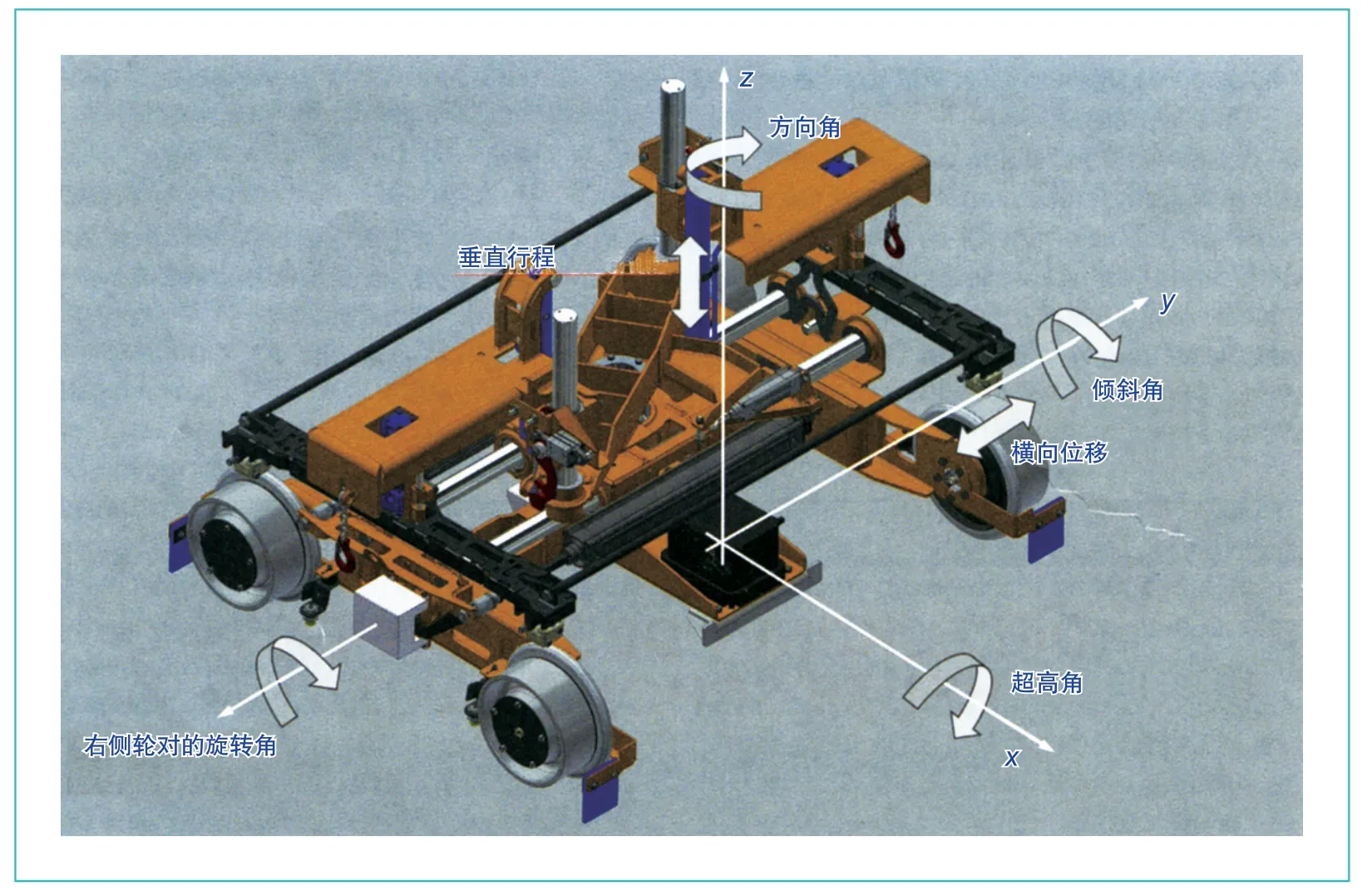
图3 通用捣固机4.0的自由度和坐标轴示意图
为使捣固机能够在轨道上安全运行,System7公司对横向力气缸和垂直气缸分别进行设计,以确保捣固机在不同摩擦力下仍能满足上述条件。
4 试验验证
EN 13848-3-2009中介绍了安装在轨道施工与维护机械上测量系统的评估方法,其核心要求是验证轨道几何形位测量参数的重复性和再现性。重复性是指在同一轨道区段中、相同测量条件(速度、测量方向、环境条件等)下进行的2次连续测量所得相同参数之间的一致性程度。再现性是指在上述条件发生变化的情况下2次连续测量所得相同参数之间的一致性程度。在该标准的附录C中为重复性和再现性2种比较方案分别规定了不同的极限值。测量参数包括高低、轨向、轨距、水平、三角坑。
在对捣固机进行校准后,必须在同一线路区段上进行多次行车测量,并对其测量结果进行比较验证。在EN 13848-3-2009第6节中介绍了现场行车测试要求。由于捣固机不是轨道几何形位检测车,因此与EN 13848-2-2006相比,其所需的试验行车次数更少。标准EN 13848-3-2009中的表2规定了试验行车的具体要求,包括最低速度、最高速度、行驶方向和车辆朝向;表3根据对于重复性和再现性的不同要求,对所需的比较进行了定义,并针对试验线路的特殊要求进行了说明。试验行车测量结果的统计分析以差分分布为基础,其前提为测量数据信息的精确同步。测量应以不超过0.5 m的相等间隔进行,具体间隔距离根据线路情况而定。由于车轮会出现打滑的情况,因此实际间隔可能会稍有偏差。
图4展示了2次试验行车测得的相同参数(超高)绝对量的总体分布情况。由图可知,差值几乎没有漂移,且明显低于极限值。这证明安装在捣固机中的惯性测量系统符合标准的规定。

图4 超高偏差分析
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
空间科学学报(2020年6期)2020-07-21 05:37:04
空间科学学报(2020年6期)2020-01-08 16:50:22
环球时报(2019-12-05)2019-12-05 05:13:15
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
汽车与安全(2016年5期)2016-12-01 05:22:12
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
