基于改进总变差正则化算法的金属缺陷三维重建方法
2021-02-28 04:00:32张静薇
天津工业大学学报 2021年1期
王 琦 ,张静薇 ,李 坤
(1.天津工业大学 电子与信息工程学院,天津 300387;2.天津工业大学 天津市光电检测技术与系统重点实验室,天津 300387)
无损检测技术(non-destructive testing technology,NDT)是指在不破坏和不影响被测对象各方面性能的前提下,利用声,光、电、磁等物理信号,对检测样品的表面凹坑、划痕及内部结构等缺陷进行检测,从而获得检测样品的相关测量数据,判断检测对象是否合格[1]。
金属材料产品广泛运用于国民经济的各个行业,随着我国经济的快速发展,对金属材料的需求日益增加。然而在金属零件加工和生产过程中,不可避免地出现各种不同类型的缺陷,在使用过程中存在极大的安全隐患。常用的金属零件无损检测方法有超声波检测、射线检测、磁粉检测和涡流检测[2-6]。超声波检测具有穿透能力强和灵敏度高的优点,但该方法需要涂抹耦合剂,不适用于在线检测。射线检测使用的射线为X射线,具有很强的穿透性,且不受材料形状和结构的影响,因此可以得到高精度的测量结果。但是由于X射线会对人体造成伤害,具有很大的安全隐患。磁粉检测可以表现出特定的缺陷特征,但该方法操作复杂且仅适合于铁磁性材料,只能检测表面和近表面的缺陷。涡流检测是一种电磁技术,具有非接触、检测速度快、灵敏度高等优点。涡流检测的传感器由一个或两个线圈组成,仅能获取检测线圈附近的检测信息,可获取到的检测信息有限,且涡流检测技术常用于检测表面缺陷。由于需要检测金属零件表面和内部的缺陷,以上方法均不能满足检测要求。因此,迫切需要提出一种新的实时在线无损检测技术。
电磁层析成像(electromagnetic tomography,EMT)是一种基于电磁感应原理的技术,具有传感器灵活、成像实时、可视化等优点,适用于金属零件缺陷检测。使用由多个线圈构成的传感器测量被测对象的信息,利用图像重建算法处理这些信息,进而重现出被测对象内部电导率或磁导率分布。EMT图像重建是典型的逆问题,具有严重的不适定性和病态性[7],为解决这一问题,传统的成像算法中常采用基于2范数的正则化算法,获得的解在一定程度上会对重建图像产生平滑效果。针对所研究的金属缺陷具有稀疏性分布的特点[8],本文采用一种改进的总变差正则化(Total Variation,TV)算法,它既能保留图像的边界信息,又能通过稀疏表示舍弃含有噪声的数据。此外,现有的EMT技术主要针对表面缺陷的二维图像重建,而对内部和表面缺陷的三维图像重建研究较少,内部缺陷检测是工业领域的要求和挑战之一。因此,本文对金属零件缺陷的三维图像重建进行了研究。
本文利用EMT方法实现了金属零件表面和内部缺陷的三维成像,使用TV正则化算法对缺陷图像进行三维重建,通过仿真和实验评估了所提出算法的性能,并与Tikhonov正则化算法和L1正则化算法进行了比较。
1 基于EMT的缺陷检测系统
1.1 实验系统构建
本文实验中所使用的基于金属缺陷检测的EMT系统由信号源模块、传感器、数据采集系统、多路选通模块和上位机5部分组成[9-11],其结构图如图1所示。EMT测量系统工作过程如下:信号源产生特定幅值频率的正弦信号作为激励信号,通过多路选通模块将激励信号施加在传感器线圈上,被测物场中的测量线圈产生感应电压,高速采集模块将采集到的感应电压信号传送到上位机,上位机利用图像重建算法对被测物场内信息进行图像重建。根据图1结构图搭建的用于金属缺陷检测的EMT系统如图2所示,其各个功能模块与图1是一一对应的。
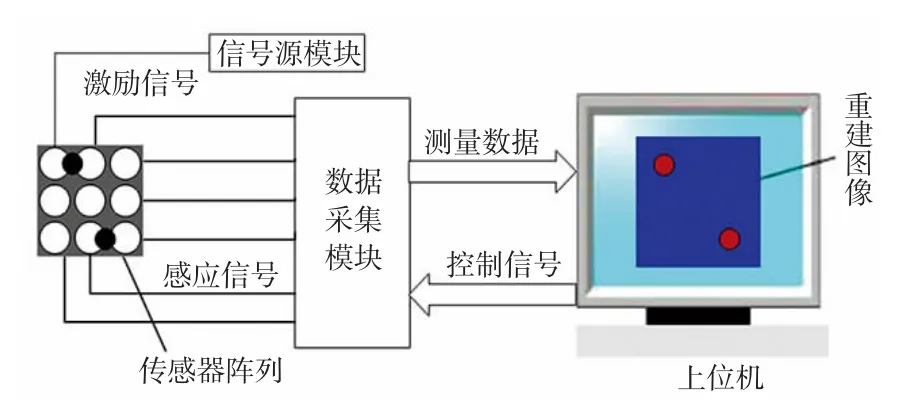
图1 用于金属缺陷检测的EMT系统结构图Fig.1 Structure of EMT system for metal defect detection
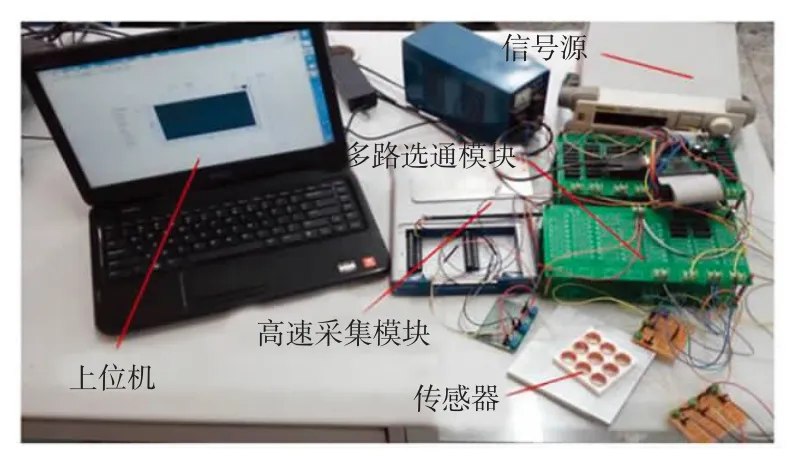
图2 实验EMT测量系统Fig.2 Experimental EMT measurement system
本实验中所有的算法都是使用MATLAB软件在Intel(R)Core(TM)i7的PC机上实现的,CPU主频为3.4 GHz,内存为4 GB;高速采集模块的型号为DG1022U;信号源模块的型号为EX3005。
平面传感器阵列由9个线圈组成,线圈呈3×3矩阵排列,如图3所示。与传统6线圈组成的“O”型传感器相比,不仅克服了敏感场中心灵敏度分布不均匀的问题,并且线圈个数增多,可以获得更多的测量数据,成像效果更好。9个线圈固定在一个非导磁塑料正方形盘上,边长60 mm,厚度10 mm。各线圈由线径为0.3 mm铜线绕制而成,匝数为100匝,高10 mm,内径12 mm,外径17 mm,线圈之间的间距为3 mm,对传感器进行标号,分别为1~9号线圈。
矩阵式分布传感器采用单线圈激励模式,其测量模式如下:在检测过程中,传感器其中一个线圈被选择作为激励线圈,注入交流激励信号,其他8个线圈作为接收线圈,接收感应电压信号,之后更换激励线圈,这个过程一直持续到所有9个线圈都被激励完毕,因此可获得9×8=72个独立电压测量值。传感器在测量时,可获得传感器测量范围内的电导率分布情况。由于缺陷的主要成分为空气,与金属的电导率差别较大,因此可以通过电导率分布判断该区域内缺陷分布情况。

图3 矩阵式分布传感器实物图Fig.3 Physical photos of matrix distribution sensor
在测量时,首先把无缺陷待测金属放在图2中的传感器下方,传感器提离高度为3 mm,测量得到空场数据,使用相同的方法测量有缺陷待测金属得到物场数据。使用物场数据减去空场数据得到数据差值,利用数据差值和图像重建算法得到缺陷分布图像。
1.2 EMT的物理模型
EMT的数学问题包括正问题和逆问题[12-13]。EMT正问题的实质是求解一个时谐涡流场问题,描述为:

式中:Vij是第i个线圈作为激励线圈时被检测线圈j的感应电压;C为物体空间的横截面积;F为感应场分布函数;σ为电导率;μ为磁导率。
EMT系统的物理模型可由Maxwell方程组得到
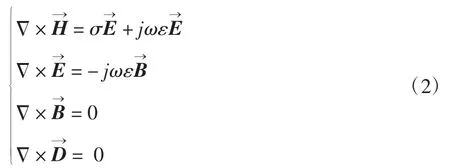
在媒质为各向同性的条件下,其对应的特性方程为:

定义矢量磁位满足

根据偏微分方程,由方程(2)、(3)、(4) 可构建EMT正问题模型

边界条件为


正问题的结果将用于计算感应线圈中的感应电压,以及逆问题所需的Jacobian矩阵。根据灵敏度矩阵公式,如果激励线圈中的总电流为I0,则感应电压对电导率变化的灵敏度为


在EMT的三维重建图像中必须考虑趋肤效应的影响[14]。在线圈中通入交流电流时,线圈周围会产生磁场,存在于线圈周围的导体近表面会产生涡流。涡流能够到达的检测深度与激励信号的频率有关。根据趋肤效应理论,随着激励频率的降低,检测深度逐渐变大。
本文采用线性逆问题解决三维重建问题,假设正问题具有线性形式

式中:ΔV∈Rm×l为感应电压的变化;S∈Rm×n×l为灵敏度矩阵;Δσ∈Rn×l为元素中电导率的变化;m为测量电压数;l为对应于不同检测深度的图像层数;n为每个层的像素数。
2 EMT的图像重建
EMT的图像重建是利用检测得到的感应电压值,通过图像重建算法重现出被测对象内部电导率和磁导率的分布图像。由于独立测量的边界电压数据的数目远小于电导率分布的数目,且容易受到外界环境噪声的干扰;式(8)中的灵敏度矩阵通常不是方阵,也不是满秩矩阵,导致EMT图像重建具有严重的不适定性和病态性,在求解过程中常采用正则化方法。
2.1 Tikhonov正则化算法
目前在电学成像领域使用最广泛的正则化方法是Tikhonov正则化算法。在Tikhonov正则化算法中,我们将不适定逆问题转化为适定极小化问题[15-16],并将最小化目标函数定义如下

式中:‖g‖2代表2范数,第一项为数据项,第二项为正则化项;L代表正则化矩阵;α代表正则化参数。
求解式(9)的导数,并令导数等于0的方式求取极值点,假设L为单位矩阵I,则可以得到式(10):

定义

所以式(11)可以变形得到式(12)

通过选择合适的正则化参数,Tikhonov正则化算法可以获得稳定的解和精确的图像重建结果。然而Tikhonov正则化算法通过在原函数的基础上增加2范数作为惩罚项,这种方法通常会使重建图像过渡平滑。对于具有稀疏性和不连续性分布特点的金属缺陷,图像重构的边缘信息丧失严重,造成图像边界模糊,图像重建的精确度不高。
2.2 改进的总变差正则化算法
TV正则化使用不连续函数解决逆问题。将总变差函数引入到EMT图像重建中[17-18]

式中:区域S为重建图像区域。
选取重建图像的灰度值G为变量,为解决变差函数可能出现的不可微的情况,采用更稳定的泛函来逼近TV(G)在空间中的情况,即

将总变差函数与正则化算法相结合,与Tikhonov正则化算法的目标函数(9)类比,将其中的第2项正则化项换成αTVβ(G),这样就得到了TV正则化目标函数
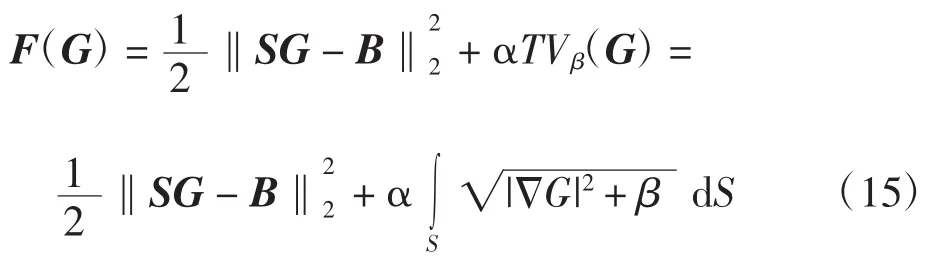
式中:α代表正则化参数;β代表光滑参数。
在实际的计算中,为方便求解通常把目标函数转化成离散的形式,则式(15)转化为

式中:L为对应的灰度方阵特性的稀疏矩阵;‖LiG‖为对应不同区域的灰度方差。
为求解式(16),本文采用Newton-Raphson算法求解目标函数极小化,求得目标函数的梯度值为

式中

目标函数的Hessian矩阵为

则基于TV正则化的Newton-Raphson迭代算法如下

算法流程图如图4所示。算法在达到最大迭代次数或第k次迭代的相对容差ek满足ek=‖Gk+1-Gk‖2≤ε时停止,其中ε为预定义的相对容差。

图4 TV正则化算法的流程图Fig.4 Flow chart of TV regularization algorithm
3 仿真结果
在本节中,为证明TV正则化算法的优越性,构建不同缺陷仿真模型,并与现有的Tikhonov正则化算法和L1正则化算法的重构结果进行了比较。
3.1 仿真模型的建立
为了验证TV正则化算法的有效性,本文在COMSOL Multiphysics环境中对EMT系统进行仿真实验。根据第1节设计的EMT系统,构建矩阵式分布传感器仿真模型如图5所示,采用单线圈激励方式,对表面和内部缺陷进行了仿真对比实验。本文中使用的待测对象是方形铝板,大小为60 mm×60 mm×10 mm。设置背景(铝)的电导率为3.774 7×107S/m,空气的电导率为1 S/m。根据各线圈磁场强度的不均匀性和测量系统的噪声等级,在仿真中加入±1%的高斯噪声,用来模拟真实环境中的噪声。EMT系统的典型噪声等级对应的信噪比约为40 dB,噪声的方差是0。
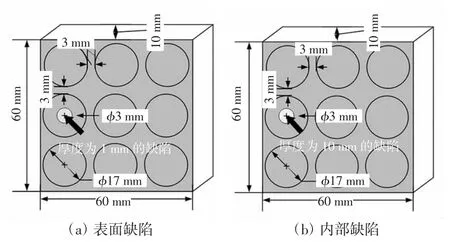
图5 矩阵式分布传感器仿真模型Fig.5 Simulation model of matrix distributed sensor
3.2 基于TV正则化算法的二维仿真结果
为了验证算法的有效性,使用Tikhonov正则化、L1正则化和TV正则化这3种算法对6种缺陷模型的表面进行二维图像重建,本实验采用10 kHz的交流激励频率,重建结果如图6所示。
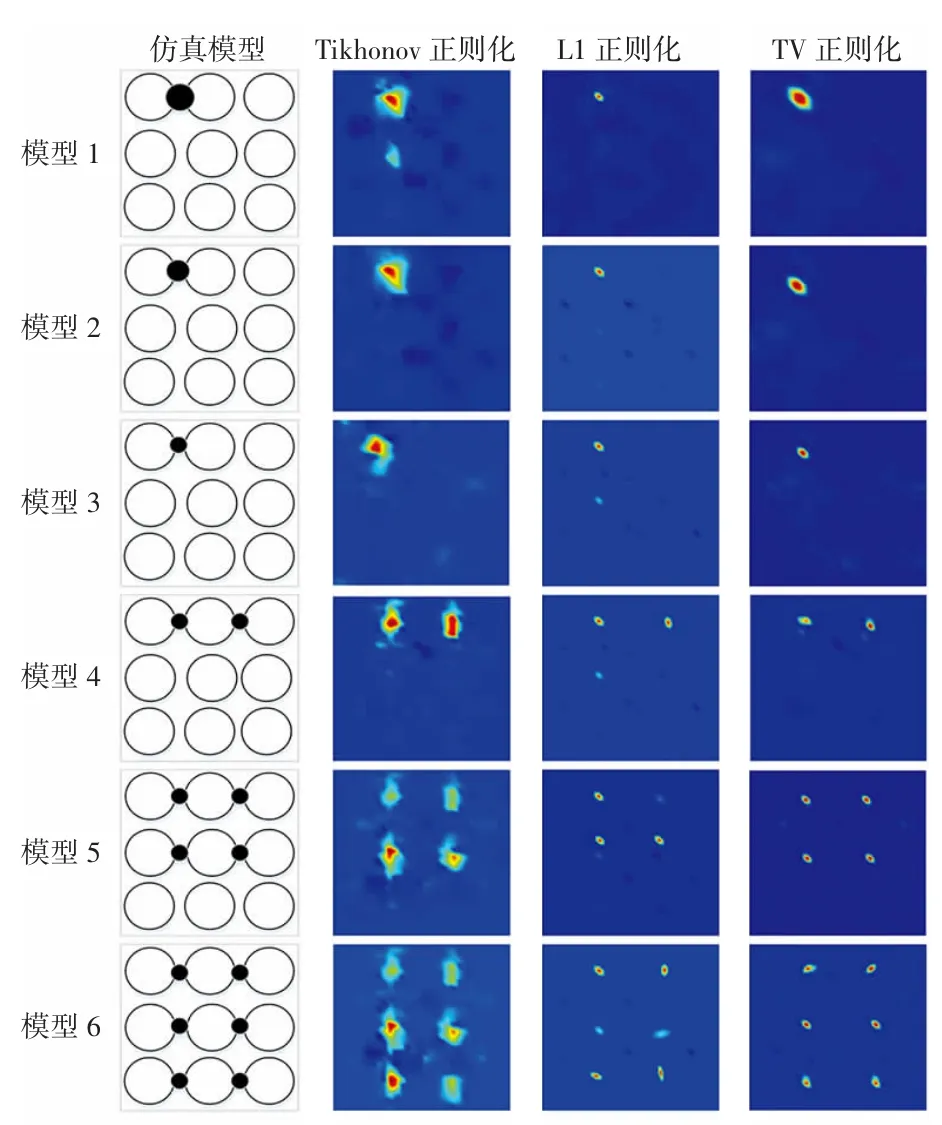
图6 6种缺陷模型的重建结果Fig.6 Reconstruction results of six defect models
图6中第1列为仿真模型,构建了6种不同尺寸、位置和缺陷个数的缺陷模型,编号为模型1~6,模型1~3的缺陷直径分别为5 mm、4 mm和3 mm,模型4~6的缺陷直径均为3 mm,所有缺陷深度均为1 mm。第2、3、4列分别对应的是Tikhonov正则化、L1正则化和TV正则化算法的重建结果。
在重建图像中,红色部分是具有缺陷的低电导率区域,蓝色部分是没有缺陷的高电导率区域,绿色部分是由噪声和算法引入的伪影。从图6可以看出,3种算法均能对缺陷的位置和数量实现重建。其中Tikhonov正则化算法的成像效果最差,伪影最严重;当缺陷的尺寸逐渐减小时,相较于另外2种算法,TV正则化算法在缺陷尺寸变化过程中的重建图像效果最好。
为了定量评价算法的性能,通过电导率分布和重构图像得到相对误差(relative error,RE)来衡量成像精度,定义如下

式中:σ*为重构电导率分布;σ为真实电导率分布。
表1为6种缺陷模重建图像的RE值。

表1 6种缺陷模型重建图像的RE值Tab.1 RE values of reconstructed images of six defect models
从表1可以看出,单个缺陷重建图像的质量要优于多个缺陷重建图像的质量。采用TV正则化算法重建的图像具有最小的RE值,与另外2种算法相比图像重建效果更好。每种缺陷模式采用3种算法图像重建的时间如表2所示。

表2 6种缺陷模型的图像重建时间Tab.2 Reconstructed image time of six defect models s
从表2可以看出,TV正则化算法运行速度最快,Tikhonov正则化算法的速度略慢于TV正则化算法,L1正则化算法需要更多的迭代次数,因此是最慢的。
3.3 基于TV正则化算法的三维仿真结果
采用TV正则化算法对铝板内部缺陷模型进行三维图像重建,所有缺陷均为直径3mm、深度10 mm的圆柱体。根据趋肤效应,可以通过选择激励频率检测不同的深度,然后通过三维插值重建出三维EMT图像[19-20]。
为了测试激励频率在不同检测深度下的灵敏度,选取100 Hz、1 kHz、10 kHz激励频率重建不同检测深度的缺陷图像(如图7所示),从而获得不同激励频率下的最佳检测深度。
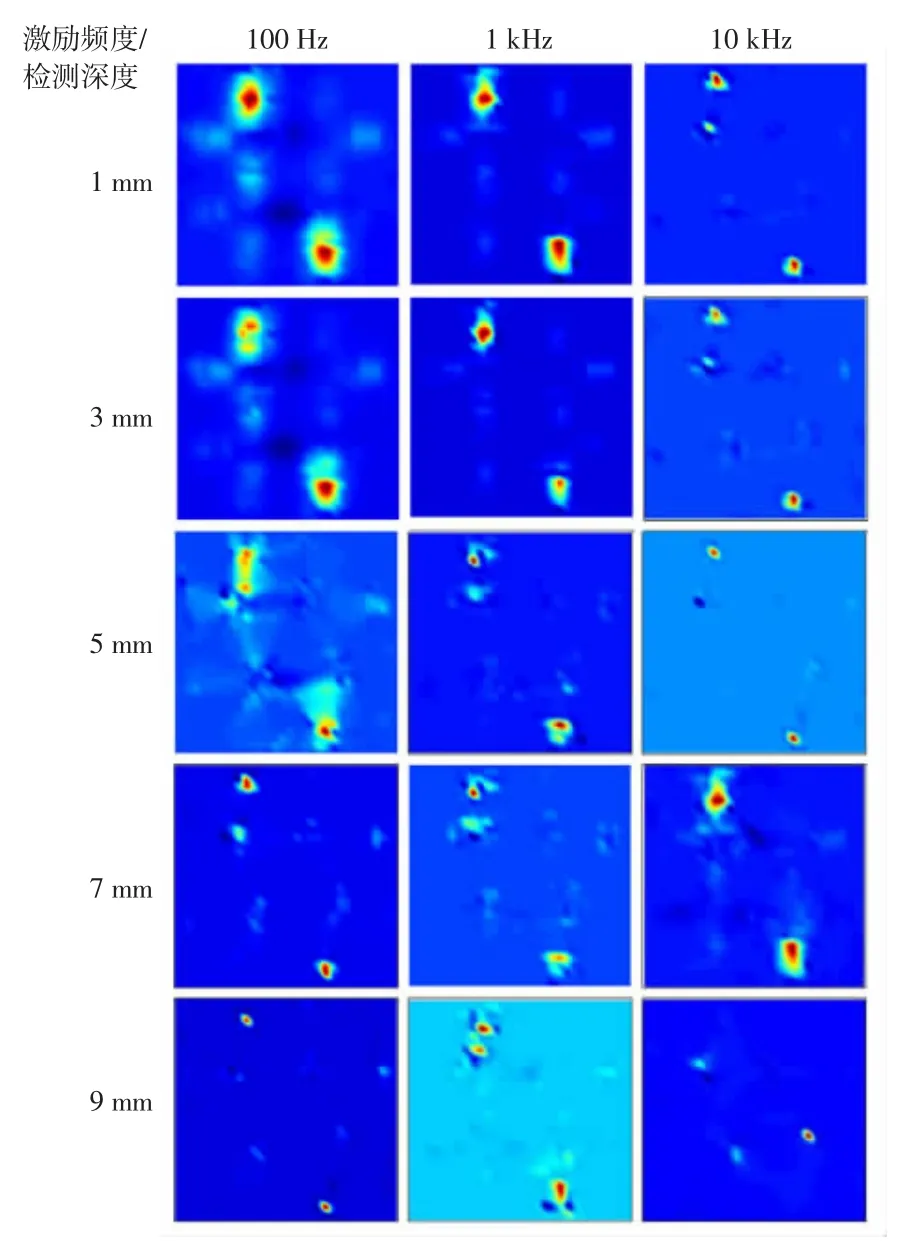
图7 不同检测深度与激励频率的关系Fig.7 Relationship between different detection depths and excitation frequencies
从图7可以看出,高频和低频激励信号均可以检测深度为1 mm的缺陷,但使用高频激励信号重建的图像更接近缺陷的真实形状。对于深度小于5 mm的内部缺陷,低频激励信号不仅可以获取缺陷的分布信息,还可以获得缺陷的形状信息。而随着检测深度的增加,最佳激励频率降低。例如,当缺陷深度为9 mm时,高频激励信号无法检测到缺陷。根据仿真结果,本文选取检测深度为1 mm、5 mm和9 mm的二维图像序列进行三维图像重建。3个检测深度对应的最佳激励频率分别为100 Hz、1 kHz和10 kHz。
为了验证TV正则化算法在三维图像重建中的优越性,构建了缺陷数目为2、4、6的缺陷仿真模型,3种算法图像重建得到的内部缺陷二维图像序列和三维重建图像如图8所示。
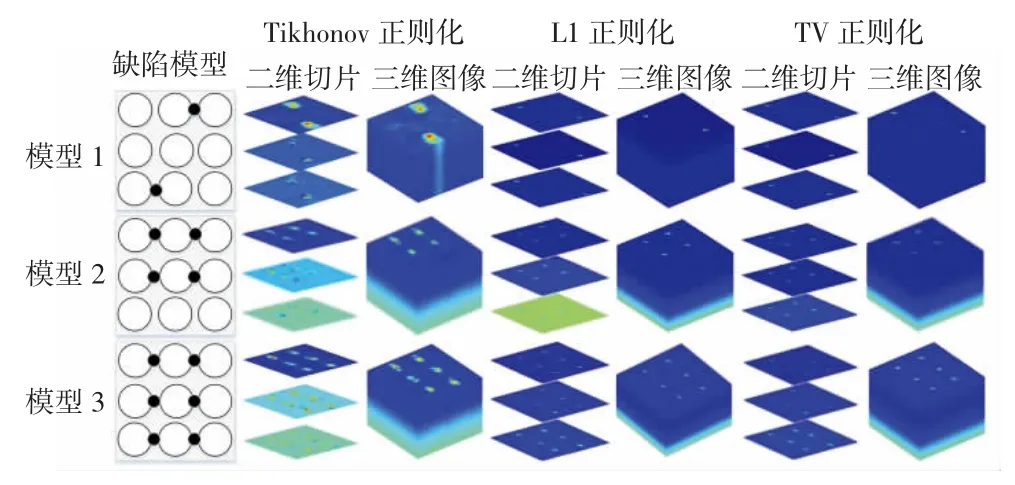
图8 3种缺陷模型三维/二维重建结果Fig.8 3D/2D reconstruction results of three defect models
利用与二维重建图像相似的误差分析方法,对三维重建图像进行定量评价。对三维重建图像的每个图像层分别计算RE值,然后取其平均值RE3D,定义如下
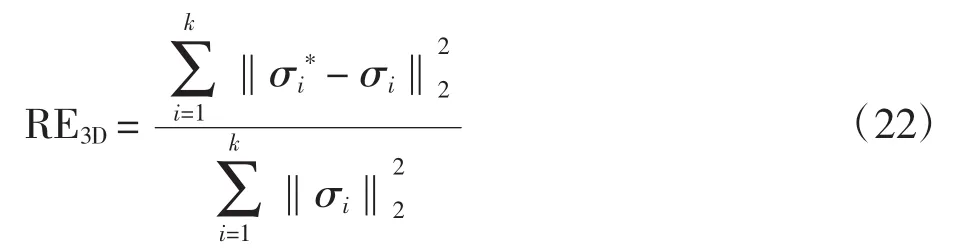
式中:i=1,2,3,…,k为不同图像层的图像;k 为图像层总数。
图8中第1列为缺陷模型,其余6列为使用Tikhonov正则化、L1正则化和TV正则化3种算法得到的二维图像序列和三维重建图像。从图8可以看出,3种算法均可以检测出缺陷的数量和近似位置。表3为内部缺陷的三维图像重建的RE值。

表3 3种缺陷模型三维重建图像的RE值Tab.3 RE values of 3D reconstructed images of three defect models
由表3可以看出,在三维重建图像中,L1正则化算法和TV正则化算法的成像质量优于Tikhonov正则化算法。此外,与L1正则化算法相比,TV正则化算法具有更好的图像重建效果。
4 实验结果
为了进一步验证TV正则化算法在EMT重建图像方面的有效性和可行性,进行了真实实验。
本节使用第1节中9线圈矩阵式分布传感器,待测对象是边长60 mm,厚度10 mm的方形铝板,在铝板上分别构建1个、2个、4个缺陷。在EMT系统中分别加入100 Hz、1 kHz、10 kHz的交流激励频率,得到不同深度的重建图像,从而得到三维重建图像,如图9所示。表4为铝板内部缺陷的三维重建图像的RE值。
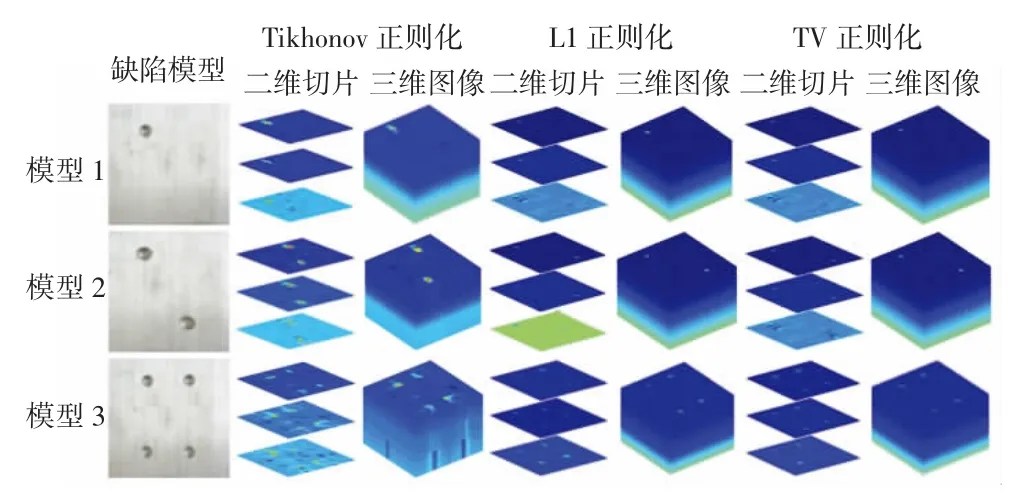
图9 真实实验三维/二维重建图像Fig.9 3D/2D reconstructed images from real experiments
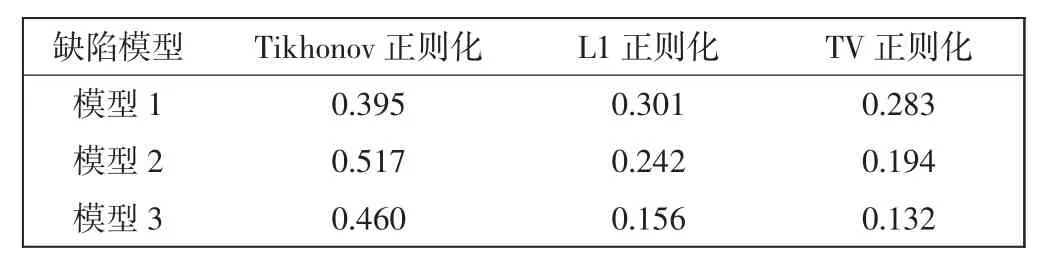
表4 真实实验三维/二维重建图像的RE值Tab.4 RE values of 3D/2D reconstructed images of real experiments
图9第1列为有缺陷铝板,其余6列为使用Tikhonov正则化、L1正则化和TV正则化3种算法得到的二维图像序列和三维重建图像。从图9可以看出,采用TV正则化算法重建的三维图像最接近缺陷的真实分布。在实际测量中,由于存在系统误差和随机误差,使得测量数据与上述数值结果存在差异。因此,在表4中得到的误差大于在表3中得到的误差。
5 结论
本文根据EMT系统图像重建的基本原理,针对金属缺陷的稀疏性分布特点,提出了一种改进的TV正则化算法对金属缺陷图像进行重建。利用COMSOL Multiphysics构建仿真模型,使用TV正则化算法对不同个数、位置的缺陷模型进行仿真和实验,并与Tikhonov正则化算法、L1正则化算法的重建图像和相对误差进行了对比。仿真和实验结果均表明,使用改进的TV正则化算法重建的结果与目标缺陷原型最接近,成像效果最好,具有更小的相对误差,可低至0.1左右。讨论了激励频率
与检测深度的关系,为三维图像重建提供了依据。由此证明了EMT系统具有对表面和次表面缺陷非侵入性检测的潜力。本文仅证明了利用EMT进行金属缺陷三维图像重建的可行性,为了进一步提高重建图像的成像效果,在今后的工作中,将通过扫频实验重点研究具有更多二维图像层的三维缺陷成像。
猜你喜欢
软件(2020年3期)2020-04-20 00:56:34
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:44
数学杂志(2018年5期)2018-09-19 08:13:48
浙江工业大学学报(2017年5期)2018-01-22 02:03:40
现代园艺(2017年23期)2018-01-18 06:57:46
光学精密工程(2016年6期)2016-11-07 09:07:56
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
中国医疗美容(2015年1期)2015-07-12 10:05:59
数学年刊A辑(中文版)(2014年5期)2014-11-01 05:43:38
技术与教育(2014年2期)2014-04-18 09:21:33