基于无人机工作模式选择的无线传感器网络数据传输
2021-02-24 13:04陈思光
南京邮电大学学报(自然科学版) 2021年6期
孙 颖,陈思光,2
1.南京邮电大学江苏省宽带无线通信和物联网重点实验室,江苏 南京 210003
2.南京邮电大学江苏省通信与网络技术工程研究中心,江苏 南京 210003
尽管第五代(5G)地面网络的密集部署能够满足热点地区物联网应用的需求,但在偏远地区、海洋和极地地区高效、低成本的无线覆盖方案却很少[1]。第六代(6G)通信是在现有的5G地面网络基础上,建设一个集低轨卫星和多种空中平台于一体、应用人工智能和大数据技术的空天地一体化信息网,以满足世界各地对万物互联的需求[2]。
无人机作为一种空中物联网设备,具有与低轨卫星和地面网络许多不同的特点。无人机具有更低的路径损耗,并且在悬停模式下按需部署的特点对于物联网中的无线传输非常有利。在现有5G网络基础上部署蜂窝物联网是物联网目前的发展方向之一[3]。然而,蜂窝物联网对地面基础设施的过度依赖不利于物联网在偏远地区和灾区的部署。相比之下,无人机具有快速响应、远程操作和可控的灵活性,可以在没有地面基础设施的情况下快速部署物联网[4],并且无人机具有空中优势,可以获得更好的视距链路,有利于充分靠近物联网设备发送信息。因此,无人机可以快速满足各种业务需求,例如为热点、灾害和偏远地区以及军事行动提供数据卸载、无线覆盖、通信中继和边缘计算。
无线传感器网络通常由大量低成本的传感器节点组成,这些节点通常由有限的能源(如电池)供电,电池耗尽后很难再充电[5]。因此,高效节能的感知和通信技术对于延长无线传感器网络的生命周期至关重要。在无线传感器网络中,无人机作为地面传感器节点的数据采集器受到人们的关注。通过利用其灵活性,无人机能够感知传感器节点并且仅当足够接近传感器节点时才收集数据。因此,将无人机作为无线传感器网络的中继缩短了传感器节点之间相互通信的链路距离,节省了传感器节点的传输能量[6]。
近年来,无人机通信被广泛研究应用于无线传感器网络以解决传感器节点能量有限问题,无人机可作为空中基站支持特定区域的地面用户[7-9]。无人机作为空中基站,可以将无人机放置在某一固定位置下作为空中中继节点,以提高地面节点之间的通信性能。目前针对无人机作为空中基站的研究主要集中在无人机部署及布局优化上。文献[7]提供了一种分析方法来优化无人机的高度,以便为地面用户提供最大的覆盖范围。类似地,通过固定高度,文献[8]对无人机的水平位置进行了优化,以最小化覆盖给定地面用户组所需的无人机地面基站的数量。在三维(3D)空间中,为了最大化可覆盖的用户数量,文献[9]研究了一个无人机支持的小单元布局优化问题。文献[7-9]均单独或联合优化无人机的高度和水平位置,用以满足不同的服务质量(Quality of Service,QoS)要求。除无人机部署以及布局优化外,更大程度利用无人机在无线传感器网络中的高机动性,可以充分发挥无人机与地面通信的潜力[10-12]。尽管无人机具有许多潜在的特点,但是由于其机载能量有限,仍然面临着节能无人机部署的挑战。基于轨迹优化,文献[10]研究了使用多天线的吞吐量优化,文献[11]研究了使用无人机的系统吞吐量最大化。在文献[12]中,无人机被用作移动中继,将独立的数据传输到不同的用户组,基于遗传算法对不同用户群的访问序列进行了数据量和中继轨迹的优化。现实情况下单个无人机往往不能满足复杂任务的需要,这可能会妨碍其大规模应用,并且以上研究并未考虑无人机的节能部署。文献[13]组建一个合作的无人机小组来提高效率,通过引入能源效率解决无人机能量有限问题,提出了一种基于能量效率通信的无人机覆盖的无线传感器网络部署模型。
基于以上研究,可以发现传统的基于无人机通信的无线传感器网络研究大多固定在无人机某一固定工作模式方面。文献[14]分别在无人机两种工作模式下研究了最佳无人机位置,而没有进行无人机工作模式的比较和选择。无人机作为空中基站向地面用户提供无线覆盖的部署可分为两类:静态无人机以及巡航无人机。静态无人机由于距离地面用户较远,吞吐量性能受到一定的限制,但静态无人机被固定在某一点不需要机械飞行,所以与巡航模式下的无人机相比能耗较低。巡航无人机通过飞行显著缩短了无人机与地面用户的距离,提供了更好的视距链路,从而提高了吞吐量,但是能量消耗也随之增加。无人机有限的能量是无人机通信中最关键的挑战之一;除了传统的通信相关能量外,无人机还需要额外的能量来维持高空飞行。
基于上述挑战,为了适应时刻变化的无线环境,突破无线传感器能量限制对无线传感器网络性能限制的瓶颈问题,实现无人机对工作模式进行自适应选择,本文研究无人机作为无线传感器网络中继,综合考虑无人机的吞吐量以及能耗,最大化无人机经济效率,提出一种自适应的无人机工作模式选择方案。主要贡献总结如下:
(1)研究了基于无人机覆盖的无线传感器网络,无人机协同传感器节点通信,基于此构建最大化无人机经济效率,从而对无人机工作模式进行选择的问题。其中,经济效率由无人机吞吐量以及能耗组成,通过联合优化无人机吞吐量以及能耗对无人机工作模式进行选择。
(2)建立了基于视距以及非视距通信链路的信道模型,在地面有多个传感器节点的情况下,通过优化静态模式下无人机坐标,来对无人机吞吐量进行优化。考虑无人机功率以及工作周期的时间划分对无人机能耗的影响并对无人机参数进行设计。由于最大化无人机吞吐量与最小化无人机能耗是相悖的,经济效率是从效益和成本角度对吞吐量⁃能耗进行评价的指标,从而采用经济效率(Economy Efficiency,ECE)作为权衡吞吐量以及能耗的通用指标来进行无人机工作模式的选择。
(3)针对综合考虑无人机吞吐量、能耗以及最大化经济效率的优化问题,提出基于状态转移的无人机工作模式选择算法。该算法首先通过求解最优的无人机静态模式的吞吐量和能耗以及无人机巡航模式的吞吐量和能耗,以经济效率作为衡量标准,实现无人机经济效率的最大化,从而实现对无人机工作模式的选择。
1 本文模型
本文研究基于无人机覆盖的无线传感器网络系统,该系统由源传感器节点和目标传感器节点组成,并辅以无人机作为移动中继。通过优化静态模式下无人机吞吐量以及巡航模式下无人机能耗,研究无人机经济效率最大化问题。根据无人机工作过程中的移动情况将无人机与地面传感器协作通信的工作模式分为以下两种:静态模式和巡航模式。
1.1 系统模型
无人机保持悬停的静态状态与地面传感器协作通信如图1所示。在笛卡尔坐标系下以传感器节点1为原点,传感器节点1与传感器节点2连线为x轴,三传感器节点所在平面为xoy平面,垂直于xoy平面的方向为z轴。传感器节点2以及传感器节点3坐标分别为:(x2,0,0)、(x3,y3,0)。 设无人机坐标为(xu,yu,zu),(xu,yu,0) 为无人机xoy在平面的投影坐标。无人机与传感器节点i的距离可以表示为

式中i∈ {1,2,3}。
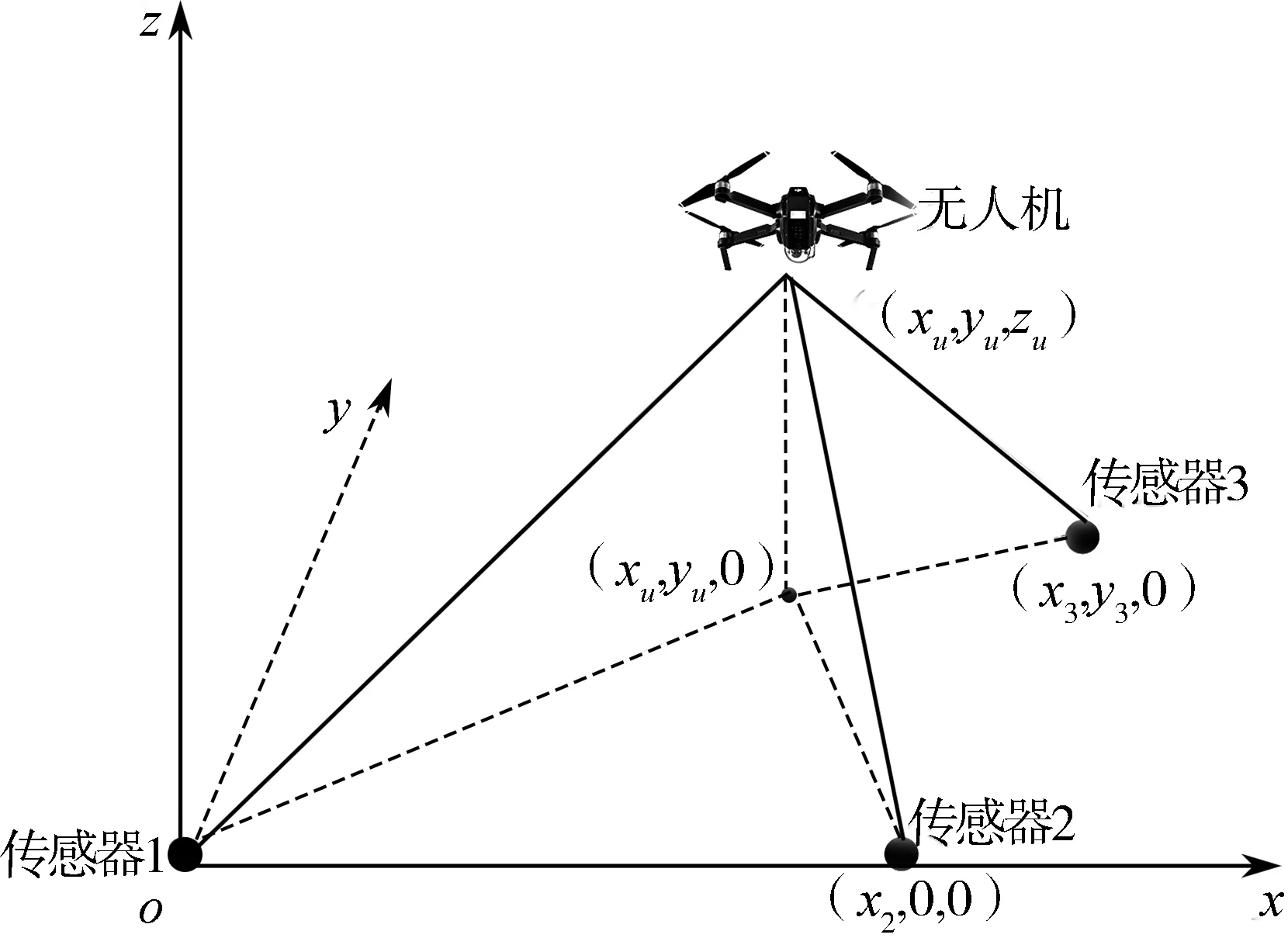
图1 静态模式下无人机与地面传感器协作通信
与静态模式相比,巡航模式有助于实现更好的空对地通道,从而提高系统吞吐量,但是飞行将消耗更多无人机能量。巡航模式下无人机与传感器网络节点协作通信如图2所示。
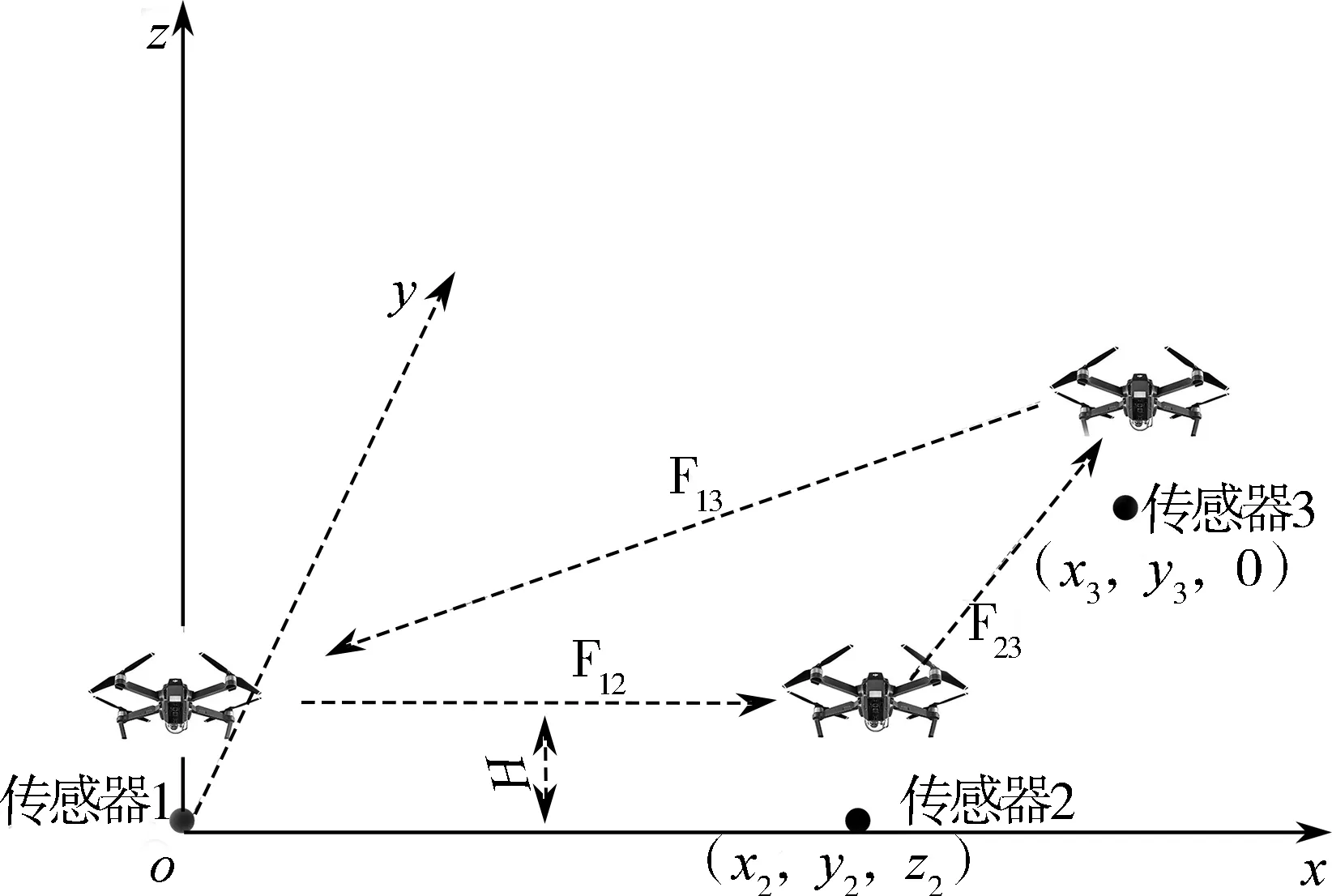
图2 巡航模式下无人机与地面传感器协作通信
假设无人机初始状态在传感器节点1处,传感器节点2与传感器节点3进行通信,无人机将从传感器节点1飞行到距离传感器节点2垂直高度为H处感知传感器节点2的信息,然后飞行到距离传感器节点3垂直距离H处将信息发送给传感器节点3。无人机、传感器节点1、传感器节点2以及传感器节点3坐标与静态模式下相同。
1.2 信道模型
本文研究基于视距和非视距通信链路的信道模型。根据文献[15]的相关理论,无人机与传感器节点之间存在视距链路的概率表示为



式中,fc为载波频率,di为无人机与传感器节点之间的距离,c为光速,α为路径损耗指数。无人机与传感器节点的非视距路径损失模型可以表示为

式中,η为非视距链路的衰减系数。
由于不能通过已知无人机与传感器通信路径是视距路径或非视距路径来确定其路径损失,所以根据式(2)~(5),无人机与传感器之间的平均路径损耗可以表示为

传感器节点的平均信道增益与式(6)相反,信道增益可以表示为

根据式(1)~(7),将香农定理应用于定义吞吐量。静态模式下Pu为无人机的发送功率,σ2为加性高斯白噪声功率,则无人机在静态工作模式下的吞吐量可以表示为
巡航模式下无人机系统的吞吐量可以表示为
1.3 无人机系统工作参数
静态模式下无人机吞吐量更大程度上取决于无人机距离各传感器节点之和的大小,距离越小,吞吐量越高。要使得吞吐量最高,即
静态无人机被固定在相当于中等山区所需的最低高度zu=100 m处,则最佳无人机坐标的横纵坐标可以表示为式(11)和(12)。
静态模式下构建无人机工作周期的帧结构如图3所示,包括:采集传感器节点1数据、转发传感器1数据以及传输数据采集指令。无人机作为传感器网络中继,服务3个传感器节点。其中两个传感器节点有数据转发需求,那么无人机将首先采集源传感器节点1的数据,然后转发此传感器节点数据给目标传感器节点2。在无人机作为中继进行工作时,同时需要向传感器节点3发送数据采集的指令,此过程即无人机向传感器节点3传输数据过程。假设无人机采集数据时间为ts,转发以及传输数据时间分别为tf、tt,T为无人机的一个工作周期。由于无人机转发的数据是无人机在时间ts内采集的数据,那么无人机转发数据的时间与采集数据的时间相等,即ts=tf。 那么无人机工作过程中一个周期内传输数据的时间可以表示为tt=T-2ts。
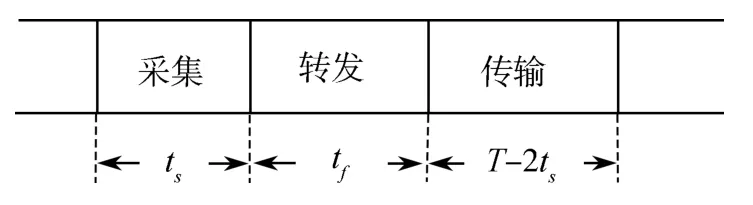
图3 静态模式下无人机工作周期帧结构
那么静态模式下无人机的能量消耗可以表示为

式中,Ps为无人机感知数据的功率,Pf为无人机转发数据的功率,Pt为无人机传输数据的功率。
对巡航模式下无人机工作周期的帧结构进行设计如图4所示。其中t1为无人机经过F12飞行需要花费的时间,t2为无人机经过F23飞行需要花费的时间,t3为无人机经过F13飞行返回初始节点需要花费的时间。与构建静态模式工作周期的时间框架相比,巡航模式的帧结构增加了飞行的时间。
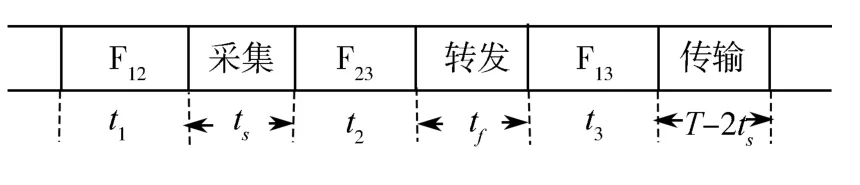
图4 巡航模式下无人机工作周期帧结构
巡航模式下无人机的能耗主要有通信产生的能耗Ec以及飞行产生的能耗Ef。 首先考虑无人机匀速直线飞行的能耗,假设无人机以速度vu匀速飞行,单位时间内无人机飞行能耗为Eslf,传感器i与传感器j的距离可以表示为

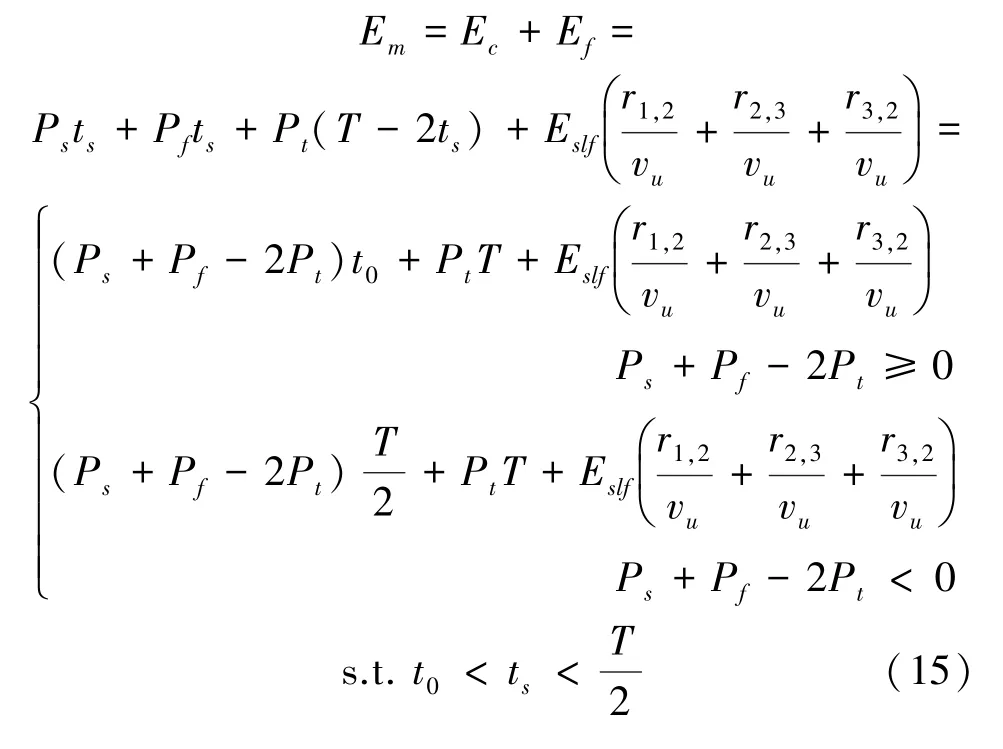
由以上分析,考虑到无人机巡航模式下通信产生的能耗以及飞行产生的能耗,巡航模式下无人机能量消耗可以表示为式(15),其中t0由无人机采集传感器数据的大小决定。
1.4 经济效率
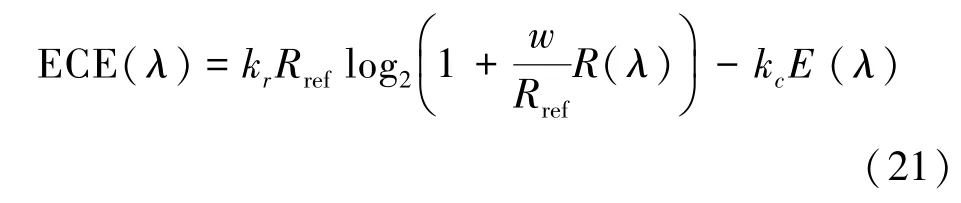
本文通过联合优化无人机吞吐量以及能耗最大程度提高无人机的经济效率。首先,根据Zhang提出的相关理论[16],ECE作为一个通用的度量,它考虑了容量和功耗,是一个衡量无人机吞吐量以及能耗的很好性能指标,可以充分体现无人机吞吐量以及能耗的特点,适用于本文提出的场景以及方案。因此,本文采用ECE作为吞吐量以及能耗性能度量的补充度量,在吞吐量和能耗之间提供一个良好的权衡。
ECE衡量系统的盈利能力,等于收入减去所提供服务的实际成本。将kr和kc分别表示为每比特的收入和每焦耳的能源成本,Rref为数据速率,R表示无人机系统吞吐量,E表示无人机系统所消耗的能量,ECE的定义如下

2 基于状态转移的无人机工作模式选择算法
吞吐量以及能耗是衡量无人机通信的两大重要指标。静态模式下的无人机由于距离传感器节点较远,对吞吐量性能造成一定的限制,但是静态无人机被固定在某一点不需要飞行,所以相较于巡航模式下的无人机通信能耗较低。巡航模式下的无人机通过飞行提升了无人机通信的吞吐量,但也消耗了更多的能量。本文的优化目标为最大化无人机系统的经济效率来对无人机静态工作模式以及巡航工作模式进行选择,即通过优化静态无人机坐标最大化吞吐量以及通过设计无人机工作周期对巡航无人机能耗进行优化来实现。
针对以上优化问题,由图5描述基于状态转移的无人机通信的工作模式切换。设状态空间I={s,m},其中s代表无人机静态模式,m代表无人机巡航模式。设无人机从静态模式到巡航模式下的转移概率为pm=λ,那么巡航模式到静态模式转移下的概率ps=1-λ。
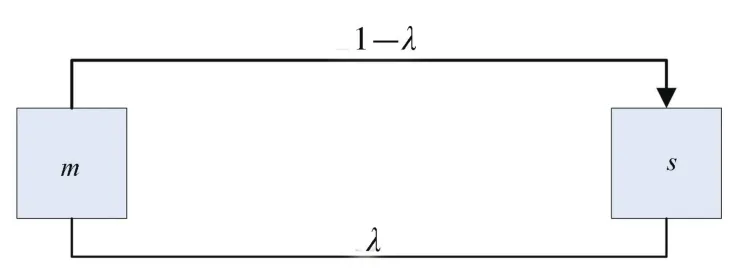
图5 状态转移模型
综合考虑无人机工作模式以及其能量是否充足,将无人机工作模式进一步划分为:“s.s”、“s.l”、“m.s”、“m.l”4 种工作模式。 其中“s.s”表示无人机能量充足的静态工作模式,“s.l”表示无人机能量不充足的静态工作模式,“m.s”表示无人机能量充足的巡航工作模式,“m.l”表示无人机能量不充足的巡航工作模式。巡航无人机通过飞行提升无人机通信的吞吐量,但也消耗了更多的能量。虽然无人机具有高机动性的优势,但是由于其能量有限,仍然面临着无人机节能部署的挑战。考虑到静态无人机不需要飞行从而能量消耗较低,并且在无人机能量充足的情况下,考虑让无人机处于巡航模式下飞行以便能够获得更高的吞吐量性能,所以未将能量充足的静态工作模式考虑在内。当无人机能量低于预定义的阈值Φ时,无人机的工作模式将切换为低电量模式,将无人机电量由充足转为不充足的转移概率记为p,那么无人机能量由不充足转为充足的状态转移概率为1-p。λ(1-p)为无人机能量不充足的静态工作模式转移到能量充足的巡航模式的转移概率,为能量充足的巡航工作模式转移到能量不充足的静态工作模式的转移概率,图6描述了无人机工作模式的状态转移。
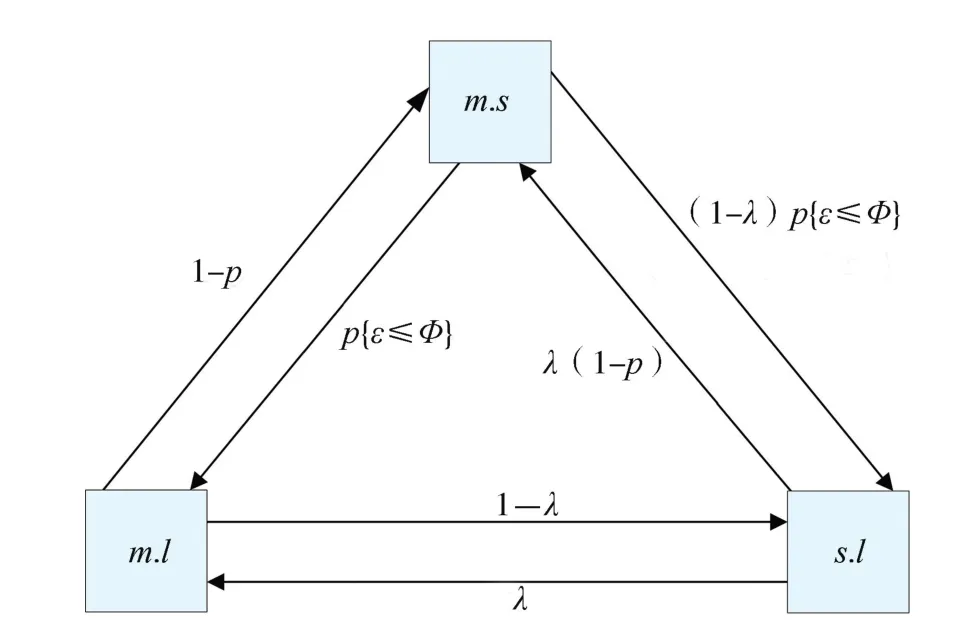
图6 无人机工作模式切换状态转移图
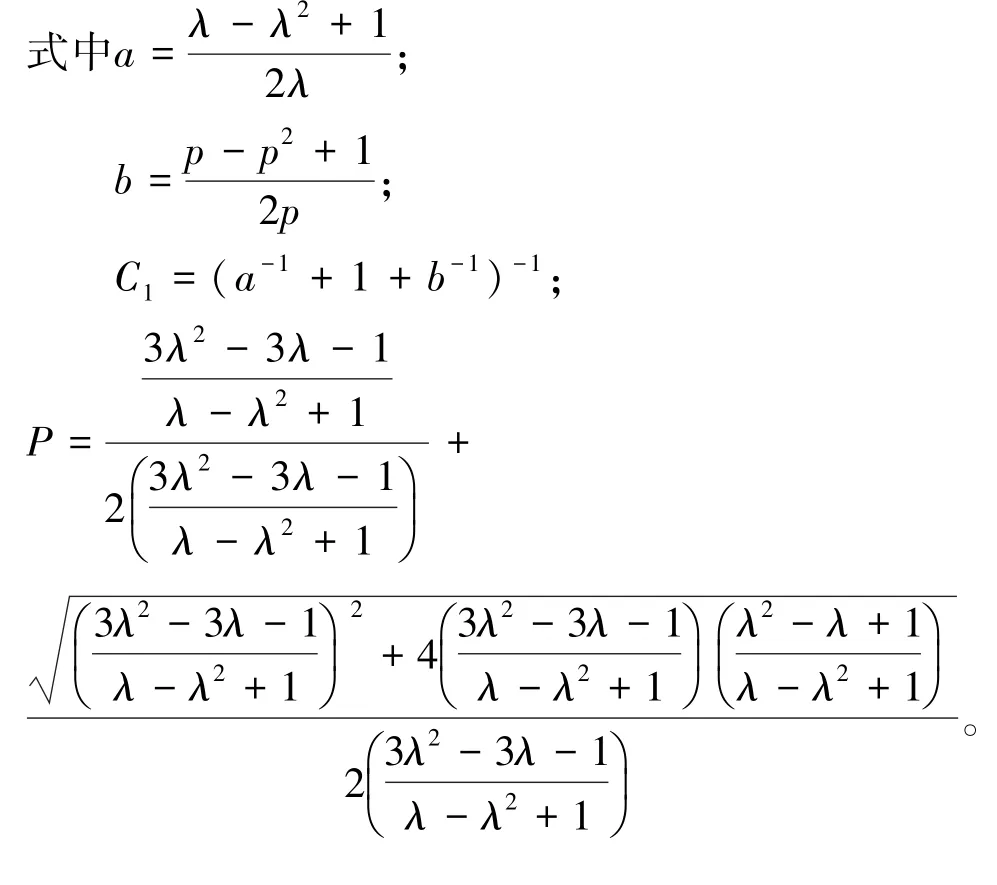
控制上述系统的归一化方程为
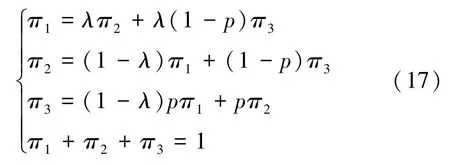
式中,πi表示处于状态i的平稳概率,对上述方程进行求解,即当无人机处于能量不充足的静态模式、能量不充足的巡航模式以及能量充足的巡航模式下的概率为

对于无人机与传感器网络协同通信,同时考虑静态模式以及巡航模式下的吞吐量和能耗,系统总吞吐量可以表示为

系统总能耗可以表示为

系统的经济效率可以表示为
为了更好地理解本文所提求解方法的思想与内涵,算法1将上述求解过程进行了总结。
算法1基于状态转移的无人机工作模式选择算法
3 仿真及结果分析
3.1 仿真参数设置
根据文献[16]以及[17]相关参数设置,将本文仿真中的参数具体设置如下。首先,对于静态无人机吞吐量函数中涉及的参数进行设置:无人机载频fc=3000 MHz,光速c=3×108m/s,非视距路径衰减系数η =21,取决于环境的常数ψ =4.88,β=0.49。 通信带宽为B=1 MHz,假设传感器节点的噪声功率谱密度为N0=-110 dBm/Hz,那么相应的噪声功率σ2=N0B=-110 dBm。 无人机发射功率Pu=10 dBm,无人机进行匀速飞行速度为v=30 km/h,无人机与传感器节点通信的时间周期T=200 s。 无人机感知数据的功率为Ps=4 W,转发数据的功率为Pf=4 W,传输数据的功率Pt=5 W,单位时间的能量消耗Eslf=11.044 W/s。 将每比特的收入设置为每焦耳的能源成本设置为
3.2 结果分析
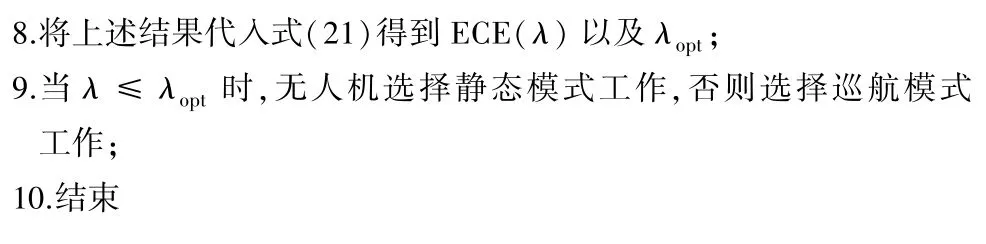
本节将从无人机系统吞吐量性能、无人机能耗以及无人机经济效率等方面来验证所提方案。首先,在考虑视距以及非视距通信链路设计信道模型的基础上,研究了在路径损耗指数α=2,3,4时的吞吐量性能随距离的变化,如图7所示。
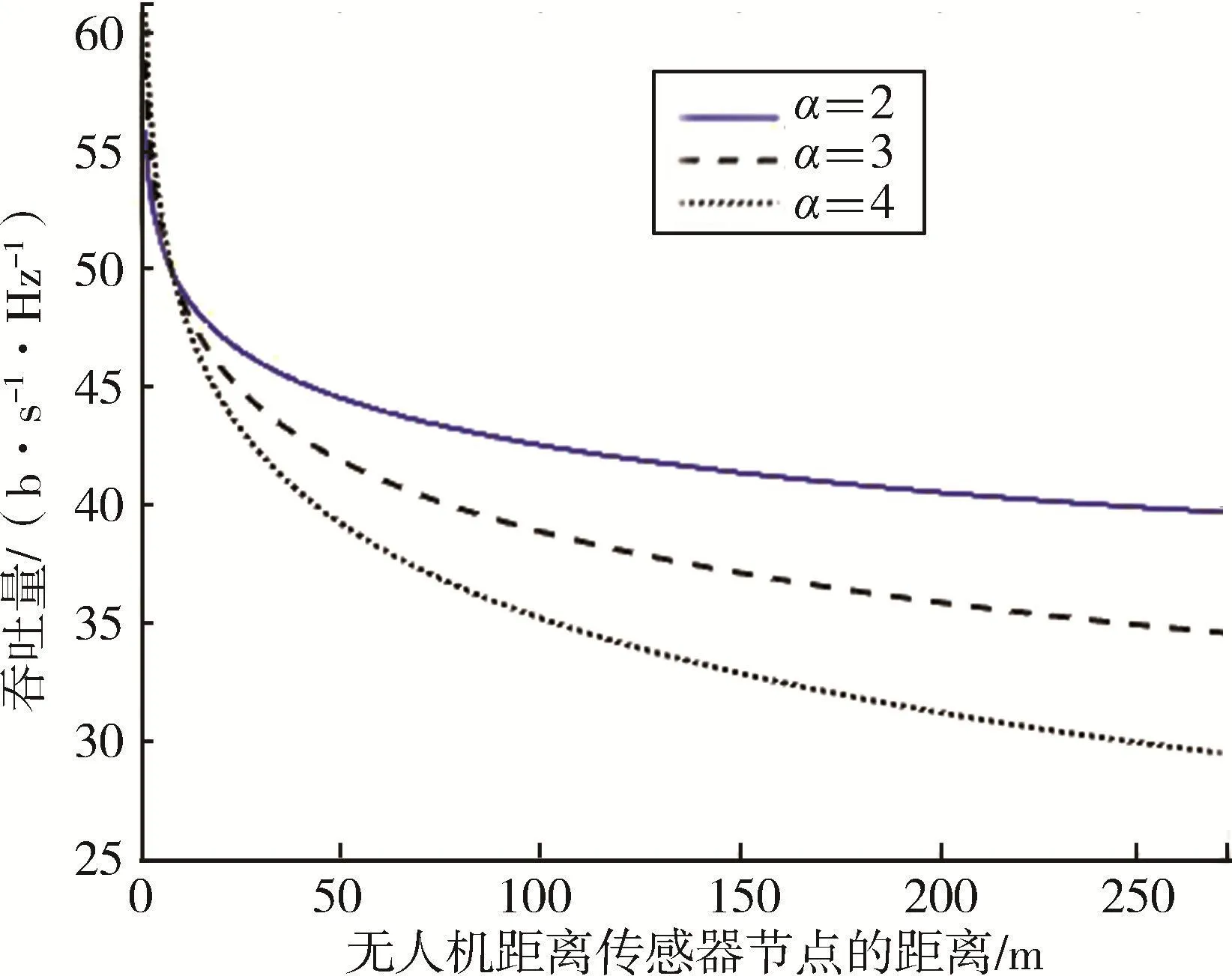
图7 吞吐量随无人机与传感器节点距离的变化情况
从图7可以发现,吞吐量性能随着距离的增加而降低,在无人机与传感器节点距离较小时,路径损耗指数对吞吐量影响可以忽略不计,在无人机距离传感器节点大于8 m时,路径损耗指数的大小对无人机吞吐量的影响越来越大,路径损耗指数α=2时无人机吞吐量性能最高。路径损耗指数α=4时无人机吞吐量性能最低,在后续仿真实验中设置路径损耗指数α=2。
给出传感器节点 2坐标为(300,0,0),传感器节点3坐标为(200,150,0)。那么静态模式下无人机最佳坐标为(191.64,81.52,100),静态无人机协同传感器网络通信的吞吐量Rs=123.09 b/s/Hz,根据式(13)计算得出能量消耗Es=880W。 巡航无人机协同传感器网络通信的吞吐量Rm=127.58 b/s/Hz,根据式(15) 计算得出能量消耗Em=1 570.41 W。 利用上述吞吐量以及能耗的计算可以进一步得出图8和图9。
图8描述了静态无人机、巡航无人机以及本文所提方案的无人机系统吞吐量随λ的变化关系。正如预期的那样,随着λ的增大,无人机越来越倾向于以巡航模式进行工作,在巡航模式下由于更靠近传感器节点,吞吐量随之增加。另外,无人机由于机械飞行会消耗更多能量,能耗也随之增加。
图8 不同方案无人机系统吞吐量对比图
综合考虑无人机的吞吐量以及能耗,将两者的比值定义为无人机能量效率(Energy Efficiency,EE)。图9描述了巡航无人机、本文所提方案以及静态无人机的能量效率随着λ的变化情况。从图中曲线走势可以看出,无人机能量效率随着λ增加而增加。当即无人机在静态模式下工作;当λ=1时,即无人机在巡航模式下工作。
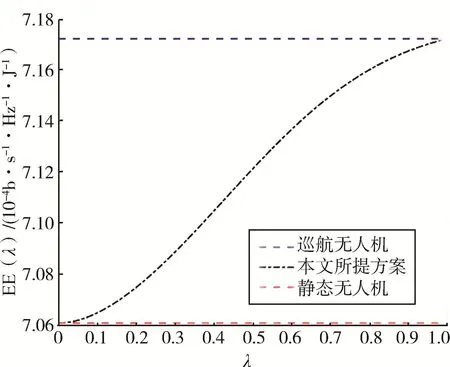
图9 不同方案无人机能量效率对比图
图10描述了不同的kr和不同的kc对无人机系统经济效率的影响。从图中曲线可以看出,当kr=时,无人机系统获得更高的经济效率。
此外,较大的收入(较大的kr)和较小的消耗(较大的kc)会导致较高的经济效率。当kr变大或者kc变小时,经济效率最高点会向左移动,即在单位比特收益较大或单位焦耳能耗较小的情况下,更倾向于追求吞吐量以实现经济效率的最大化。无人机经济效率在一开始时增大,然后减小,中间存在使得无人机经济效率最大的最佳的λopt。 即当λ≤λopt时,无人机选择静态模式进行工作;当λ>λopt时,无人机选择巡航模式进行工作。当λ=0时,无人机处于静态模式下工作,λ=1时,无人机处于巡航模式下工作。与无人机传统的静态工作模式以及巡航工作模式相比,基于状态转移的无人机工作模式选择算法在经济效率方面可获得更高的性能提升。
4 结束语
为了适应不断变化的无线环境,解决传感器能量有限以及突破其能量限制对无线传感器网络性能限制的瓶颈问题,本文研究基于无人机覆盖的无线传感器网络,通过对无人机系统工作参数进行设计,联合优化了无人机吞吐量以及能耗,规划了一个最大化无人机经济效率的优化问题。基于上述问题,综合考虑无人机能量,将无人机工作模式进一步划分和选择,提出基于状态转移的无人机工作模式选择算法。仿真结果证明,本方案能够最大化无人机经济效率,得到最优λopt,基于此实现无人机工作模式的自适应选择,并且与其他两种传统工作模式相比,本文所提方案在经济效率方面有较大提升。下一步将考虑更加复杂的网络环境,并将网络安全以及隐私保护[18]纳入其中,使本文场景更贴近无人机实际应用场景,进一步提升无人机系统的安全与经济效率。
猜你喜欢
昆钢科技(2022年2期)2022-07-08
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
成都体育学院学报(2021年1期)2021-07-16
建材发展导向(2021年23期)2021-03-08
阅读(低年级)(2019年4期)2019-05-20
华人时刊(2018年15期)2018-11-10
集装箱化(2017年4期)2017-05-17
集装箱化(2016年11期)2017-03-29
集装箱化(2016年12期)2017-03-20