微重力环境模拟作业训练机器人碰撞力反馈控制
2021-02-24 08:48:38肖鑫磊张立勋林凌杰
宇航学报 2021年12期
肖鑫磊,宋 达,李 刚,张立勋,薛 峰,林凌杰
(1. 东北电力大学机械工程学院,吉林 132012; 2. 哈尔滨工程大学机电工程学院,哈尔滨 150001)
0 引 言
近年来,随着空间站及深空探测技术的发展,航天员需要完成更加复杂、繁重的空间任务,为此航天员需要在地面模拟的微重力环境中接受各种任务的操作训练,常驻空间站航天员需要至少2年的培训时间[1-2]。神舟七号的成功发射和中国航天员完美的太空行走标志着我国航天水平已经提升到全新的高度[3-4]。神舟十一号航天员在天宫二号里有序的完成太空中各项实验任务,表明随着我国航天事业的发展,航天员的空间操作任务将会更多[5]。空间站上的微重力环境与地球上的重力环境有很大不同,虽然物体没有重力,但是物体的惯性力依然存在,这将给习惯于重力环境中生活的航天员在空间站上带来一定的操作危险。为此,需要在地面上对航天员进行微重力操作训练使其提前适应空间站上的环境。
航天员完成日常任务中经常产生碰撞力,所以碰撞力反馈训练非常重要。目前,航天员操作训练常用的方法是中性浮力水槽和基于虚拟现实技术(Virtual reality,VR)的视觉沉浸训练[6]。随着VR技术应用逐渐完善,使用数字仿真来构建空间站及内部需要操作的物体进行航天员作业训练,具有成本低、场景更新灵活和训练时间长等优势[7-8]。由于VR技术的这些优势,国内外学者尝试采用VR技术结合力反馈装置实现训练人员的力觉临场感体验。
目前,用于航天员碰撞力反馈训练的装置存在结构复杂、模拟的碰撞力与实际的碰撞力差异大等问题。本文搭建了一种基于柔索并联的微重力环境模拟作业训练机器人,该机器人具备了柔索并联机器人的力反馈大、工作空间大、安全性高等优点[9-16]。同时,用于柔索驱动单元和微重力环境模拟作业训练机器人系统的控制策略存在精度低、实时性差等问题,无法满足航天员碰撞力反馈训练的临场感要求。本文提出了一种基于干扰观测器的柔索驱动单元控制策略和一种机器人系统碰撞力反馈控制策略,并通过仿真和实验验证了这两种控制策略的有效性。
1 结构方案及工作原理
微重力环境模拟作业训练机器人主要用于航天员在模拟的微重力环境中进行操作训练。碰撞力临场感训练是航天员典型的常规操作训练之一。而本文研究的重点为平面构型的微重力环境模拟作业训练机器人,能够将具有三个自由度物体的运动和碰撞力反馈给操作训练的航天员。
1.1 组成
微重力环境模拟作业训练机器人主要是基于柔索驱动并联机构,柔索驱动并联机构是一种由柔索代替传统并联机构的连杆而构成的新型并联机构,具体结构如图1所示。柔索驱动并联机构主要由固定平台、驱动单元、牵引轮、柔索、铰链和末端执行器等部分组成,是一种将驱动元件的力和运动通过柔索传递给末端执行器的并联机构形式[17-20]。
与刚性并联机构对比,柔索驱动并联机构用于微重力环境模拟作业训练具有如下优点:
1)柔索驱动单元安装在固定平台上,没有刚性机械臂占用在机器人空间内部,便于模拟多方向作业训练任务。
2)实现较大位置空间的前提下,多轴姿态控制机构最简单,且运动部件的质量和惯量较工业机器人比较小。
3)操作安全性好,避免工业机器人机械臂运动对训练人员的伤害。此外,训练人员面前没有庞大的机构,训练时心里具有安全感。
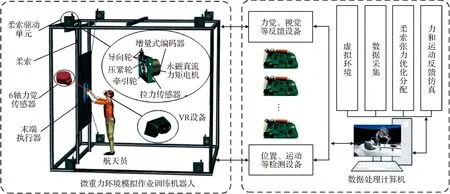
图1 微重力环境模拟作业训练机器人的结构与组成Fig.1 Structure and composition of training robot for microgravity environment simulation
4)模块化的柔索驱动单元为机器人的安装和维修带来方便。针对不同的训练任务,可以灵活的改变机器人构型,实现一机多用。
1.2 工作原理
用于航天员训练的微重力环境模拟作业训练机器人,其工作原理为:航天员通过佩戴VR眼镜使自己沉浸在空间站场景中,并操作微重力环境中的虚拟物体,例如舱门、维修设备、太阳能电板等,虚拟物体与机器人的末端执行器把手相对应,航天员操作所产生的力和力矩由6轴力觉传感器检测后反馈给计算机;计算机按内部控制算法分配力矩给4或8个柔索驱动单元,柔索驱动单元带动柔索产生相应的力并作用于末端执行器,末端执行器上输出与航天员在VR虚拟场景中对应操作虚拟物体的惯性力和位移;航天员在地面上通过佩戴具有空间站内部虚拟场景的VR眼镜,同时手部操作与空间站内部一致的物体,从而进行微重力环境模拟作业训练[21]。
2 碰撞力反馈模型
航天员需要通过微重力环境模拟作业训练机器人来感受虚拟物体的运动特性和力学特性。因此,需要建立微重力环境中虚拟物体的动力学模型,计算虚拟物体的位置、速度和力反馈。
2.1 虚拟物体动力学模型
由于物体在微重力环境中,可以忽略物体的重力,这样虚拟物体二维空间微重力环境中动力学模型为:
(1)
式中:me为虚拟物体质量;aex,aey分别表示虚拟物体在x轴方向和y轴方向的加速度;Je表示虚拟物体转动惯量;θ虚拟物体绕z轴的转动角度;Fhx,Fhy,Mh为虚拟物体受到的操作力和力矩。
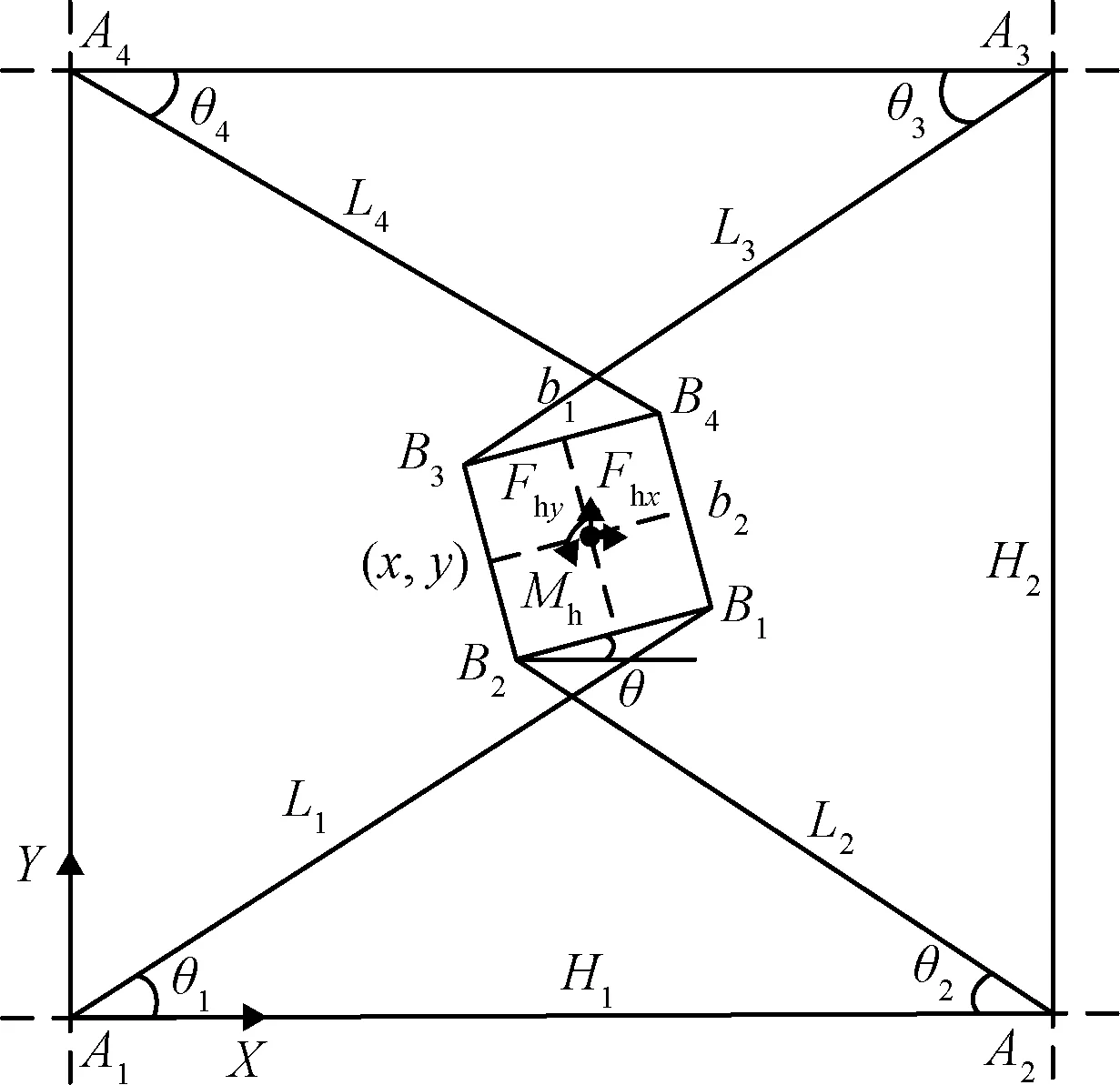
图2 平面构型机器人受力分析Fig.2 Force analysis of planar robot
2.2 末端执行器操作力
末端执行器操作力即虚拟物体产生的碰撞力,末端执行器将虚拟物体产生的碰撞力施加到航天员的手臂上。虚拟物体的碰撞力可以通过计算末端执行上铰接的4根柔索的合力及合力矩求得。平面构型机器人受力分析如图2所示。
假设航天员的操作力及力矩作用于末端执行器的质心点,A1点为坐标原点,H1,H2为固定平台的宽和高,b1,b2为末端执行器的宽和高。根据几何关系:
(2)
式中:α为∠B1B2B4,κ为∠B4B2B1。
末端执行器与柔索铰接点坐标为:
(3)
4根柔索的长度分别为:
(4)
柔索与固定平台的夹角为:
(5)
采用文献[21]提出的平面构型微重力环境模拟作业训练机器人柔索张力分配策略计算柔索张力:
T=P+w+(I-P+P)×0.25λ
(6)
式中:P∈R3×4为结构矩阵;P+为P的广义逆矩阵;I∈R4×4为单位矩阵;w为外力与力矩矩阵;λ为变柔索张力的系数。
末端执行器受到的柔索作用力的合力及合力矩,即操作力为:
(7)
式中:mo为末端执行器质量;aox,aoy分别表示末端执行器在x轴方向和y轴方向的加速度;Jo表示末端执行器转动惯量;θ末端执行器绕z轴的转动角度;Fh,Mh为航天员的操作力和力矩。
2.3 虚拟环境模型
本文重点分析微重力环境模拟作业训练机器人受到力是均匀分布在虚拟物体表面的。因此,采用的环境模型主要有弹簧属性虚拟环境模型、阻尼属性虚拟环境模型和质量属性虚拟环境模型三种。
虚拟环境模型需要计算虚拟物体与其发生碰撞时的力和力矩,设定航天员操作力作用于虚拟物体质心点,虚拟物体为长方体,各端面与虚拟环境接触,虚拟环境的反作用力均匀分布在各端面上。为使虚拟物体碰撞后与被碰撞物体保持一段时间,所以选择典型弹簧属性虚拟环境模型,二维空间虚拟环境模型为:
(8)
(9)
式中:Fsx,Fsy分别为x轴方向和y轴方向虚拟环境产生的碰撞力,x和y轴方向的碰撞位置可以根据需要设定。K为虚拟环境的刚度,B为虚拟环境的阻尼,通过设定不同方向上不同虚拟环境刚度和不同虚拟环境阻尼来改变虚拟环境产生的碰撞力大小。
2.4 人与虚拟环境交互模型
基于微重力环境模拟作业训练机器人的人与虚拟环境交互模型如图3所示。

图3 人与虚拟环境交互模型Fig.3 The model of human and virtual environment interaction
虚拟物体产生的碰撞力及位移与机器人反馈给训练人员的力及位移关系为:
(10)
式中:Fb=Fh为交互力;Xh为输入位移;Xe为虚拟物体的位移;Go为末端执行器重力;kb为比例系数。
虚拟物体与虚拟环境间的作用力为:
(11)
式中:me为虚拟物体质量;aex,aey分别表示虚拟物体在x轴方向和y轴方向的加速度。从而计算出反馈给训练人员的交互力Fb。
3 控制策略及仿真分析
3.1 柔索驱动单元数学模型
微重力环境模拟作业训练机器人采用4个相同的柔索驱动单元在固定平台上对称放置。单个柔索驱动单元的模型如图4所示。
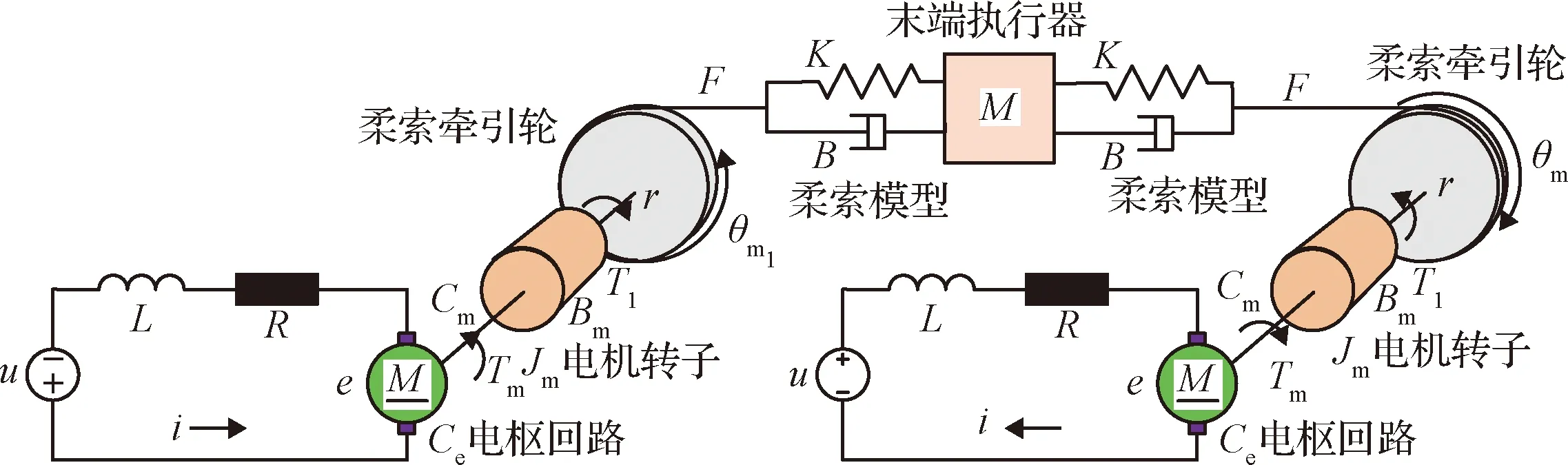
图4 柔索驱动单元模型Fig.4 Model of the cable driven unit
图4中,Tm表示电机驱动力矩;Jm表示力矩电机转子及柔索驱动单元牵引轮的等效转动惯量;Bm表示传动机构等效粘滞摩擦系数;Tl表示负载力矩;θm是柔索牵引轮转角;Cm表示电机力矩常数;Ce表示电机反电动势常数。由机电系统力矩平衡式[22]:
(12)
直流力矩电机电枢回路式为:
(13)
式中:u表示直流力矩电机电枢电压;L是电机电枢回路的电感;R是电机电枢回路的电阻;e是电机反电动势;i是电机电枢电流。
(14)
依据文献[21]的研究,柔索驱动单元通过柔索将力传递给末端执行器,由于柔索长度较短及运动过程中振动频率相对较低,将末端执行器与柔索简化成一个集中模型,即等效成“质量弹簧阻尼”模型,可以列出模型的平衡式为:
(15)
式中:B表示柔索的阻尼系数;M表示末端执行器质量;K表示柔索刚度系数;E0是柔索末端的位移;E是柔索驱动单元牵引轮线位移。
将式(12)~(15)进行拉氏变换并与力矩电机和电流的关系式联立,可以得到柔索驱动单元开环时加载系统的方框图,如图5所示。
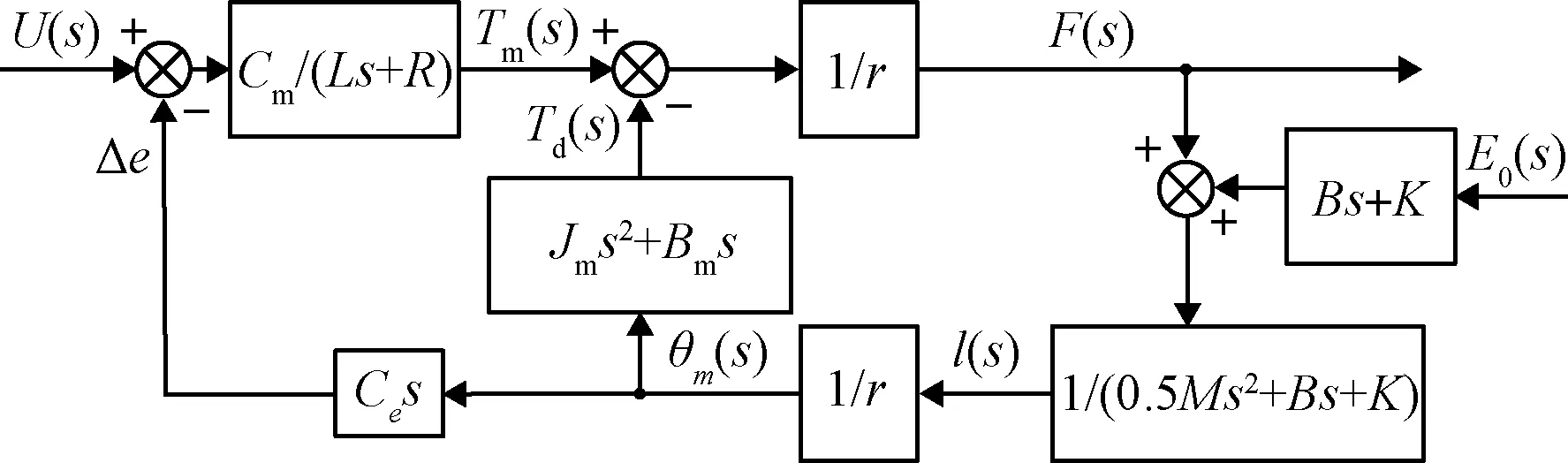
图5 柔索驱动单元加载系统方块图Fig.5 The block diagram of the loading system of the cable driven unit
由图5可以得到柔索驱动单元的数学模型为:
(16)
式中:Gp(s)为前向通道传递函数;Ge(s)为多余力通道传递函数。由梅逊公式推导可知:
(17)
(18)
式中:Je表示柔索驱动单元的等效转动惯量;Be表示柔索驱动单元的等效粘滞摩擦系数。
由于柔索驱动单元工作时一些参数受工作时间长短、柔索长度变化等因素影响,因此模型不唯一。当不考虑参数变化时,柔索驱动单元模型称为标称模型,根据文献[22]进行的电机粘滞摩擦系数实验、柔索刚度特性实验等确定的柔索驱动单元各标称参数值见表1。

表1 柔索驱动单元伺服系统标称参数表[22]Table 1 Nominal parameter table of the cable driven unit servo system
从式(17)柔索驱动单元的前向通道传递函数可判断该系统是0型系统,为了改善系统的稳态精度需要提高系统类型,因此采用PI控制器,这样系统变为I型系统,使系统的稳态性能得到提高。前馈控制和局部反馈控制可以提升系统对指令信号的跟踪能力,在PI控制器的基础上提出一种具有前馈控制和局部反馈控制的复合控制策略,该策略可以控制柔索驱动单元降低多余力对加载精度的影响,其结构如图6所示。
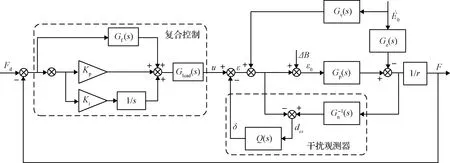
图6 柔索驱动单元控制策略结构图Fig.6 The control strategy structure of CDU
考虑到干扰观测器具有计算量小、实时性好、不需要增加传感器等优势,采用干扰观测器做内环控制补偿由于摩擦和力矩波动等带来的干扰多余力、速度补偿消除加载对象运动带来的多余力;采用外环控制实现系统性能指标要求。其复合控制结合干扰观测器的控制策略如图6所示。
其中,复合控制器中的Gf(s)为前馈矫正环节,Glead(s)为局部反馈矫正环节;ΔB为力矩波动;Gn(s)为名义模型;Q(s)为低通滤波器,根据柔索驱动单元数学模型,采用分子为一阶,分母为三阶的滤波器为:
(19)
式中:τ是平衡干扰观测器抑制测量噪声能力及抗干扰能力的参数。
3.2 碰撞力反馈控制策略
根据第2节的理论分析,提出微重力环境模拟作业训练机器人系统碰撞力反馈控制策略,如图7所示。
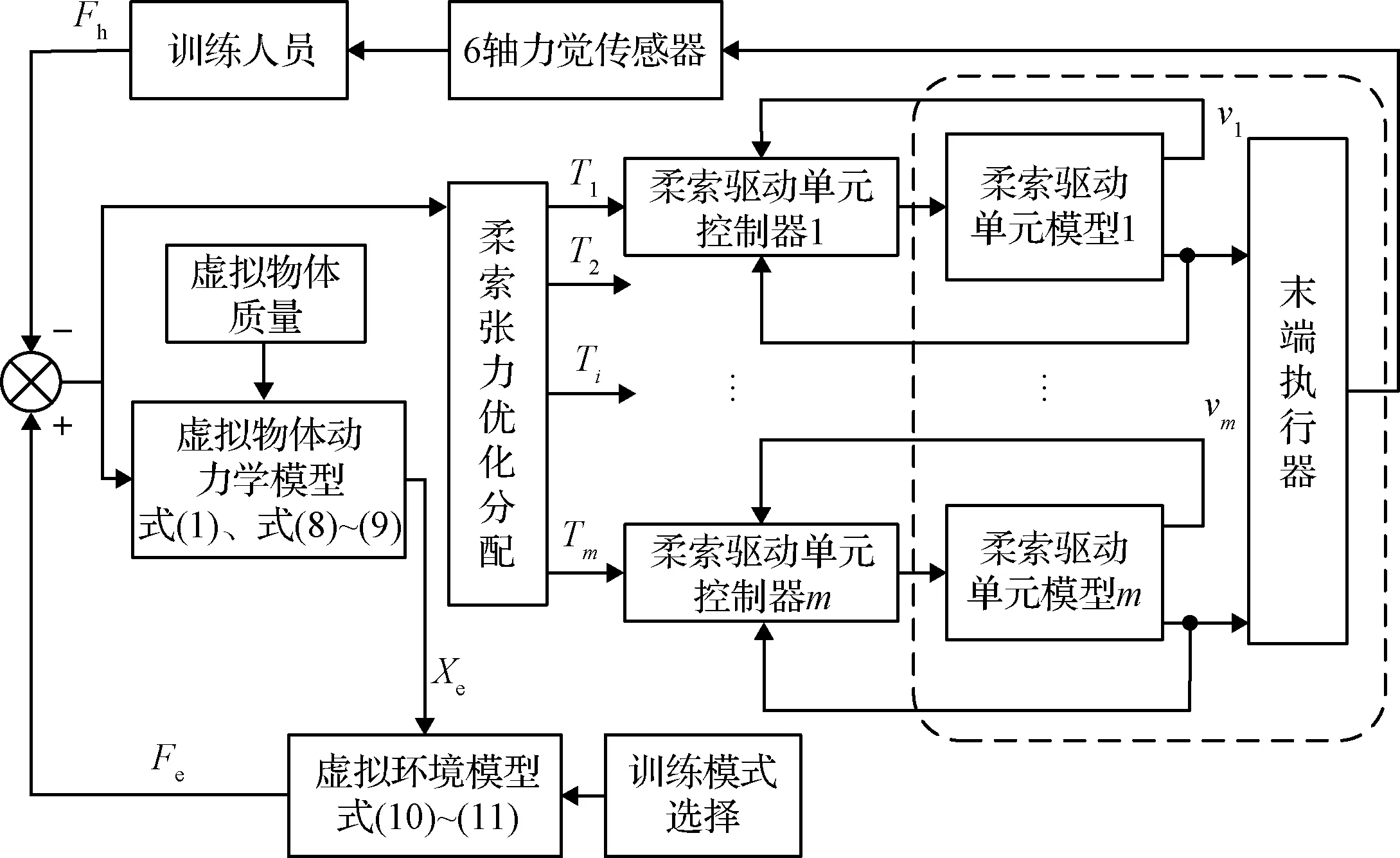
图7 机器人系统碰撞力反馈控制策略Fig.7 The collision force feedback control of robot system
微重力环境模拟作业训练机器人的控制原理为:选定需要训练的任务模式,航天员推动末端执行器上的把手,6轴力觉传感器检测航天员手臂上的力Fh,虚拟物体动力学模型确定虚拟物体产生的位移,根据选择的训练模式计算出相应的虚拟力Fe;将合力进行柔索张力优化分配,确定各个柔索驱动单元需要分配的力Ti;柔索驱动单元控制器控制各个柔索的张力来带动末端执行器运动,末端执行器与虚拟物体运动具有对应的比例关系,柔索张力在末端执行器上产生的合力及力矩即为虚拟环境的交互力Fb;柔索驱动单元的编码器实时检测柔索的长度,从而控制末端执行器的位移;机器人的各种工作模式工作空间都在确定的力螺旋可行工作空间之内,不允许超过确定的工作空间,保证机器人工作时不失控。
确定每根柔索张力后,采用3.1节提出的复合控制结合干扰观测器的柔索驱动单元控制策略对每根柔索的张力准确控制。
3.3 仿真校验
为了验证虚拟物体动力学模型、虚拟环境模型、人与虚拟环境交互模型的准确性,机器人系统碰撞力反馈控制策略的合理性,本节对系统控制策略进行仿真分析,为下一节人机交互实验做理论准备。
当选择机器人的训练模式为碰撞模式时,虚拟环境中需要设定碰撞位置。设定虚拟物体质量为20 kg和80 kg,使虚拟物体以0.06 m/s速度与设定在y轴正方向120 mm处的虚拟墙发生碰撞,碰撞力的大小根据训练要求更改,分别设定虚拟环境的刚度K=100 N/m、K=1000 N/m、K=10000 N/m,虚拟环境的阻尼B=20 N/(m·s-1)、B=30 N/(m·s-1)、B=40 N/(m·s-1)。当虚拟物体质量为20 kg,虚拟环境的刚度和阻尼变化时,机器人末端执行器输出力及运动情况如图8所示。
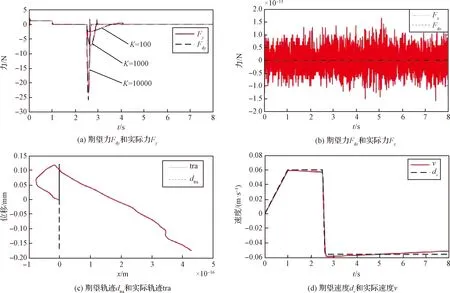
图8 机器人模拟物体碰撞时受力和运动分析Fig.8 Force and motion analysis when robot simulate collision of object
从图8(a)~(d)中可以看出,虚拟环境刚度增加时,虚拟物体与虚拟环境的碰撞时间缩短,碰撞力增大;无论虚拟环境刚度和阻尼如何变化,碰撞力在x轴方向几乎为0,虚拟物体运动的期望轨迹与实际轨迹、期望速度与实际速度基本一致,从而验证了虚拟环境模型的正确性。
当虚拟物体质量为80 kg、虚拟环境刚度K=10000 N/m、阻尼B=40 N/(m·s-1)时柔索张力情况如图9所示。
从图9中可以看出,机器人采用对称布局且末端执行器沿着y轴方向发生碰撞时,柔索1、2的受力情况基本一致,柔索3、4的受力情况基本一致。图9(a)和(b)可以看出当末端执行器加载和卸载瞬间柔索驱动单元产生的超调量大于碰撞时的超调量,但是柔索驱动单元的期望张力和实际张力变化基本一致。证明了柔索驱动单元的控制策略用于二维空间虚拟环境模型的有效性。
不同参数变化对碰撞力和碰撞时间的影响见表2。从表2的仿真分析结果可以看出,随着虚拟物体质量的增加,碰撞力增大,碰撞时间增多,主要是由于虚拟物体质量增加时,惯性力增加;随着虚拟环境刚度增加,碰撞力增大,碰撞时间变短;随着虚拟环境阻尼增大,碰撞力变小,虚拟环境刚度较小时碰撞时间增加,刚度较大时碰撞时间基本不变。可以证明,将平面构型微重力环境模拟作业训练机器人用于模拟不同质量虚拟物体与虚拟微重力环境发生碰撞时碰撞仿真模型的正确性。
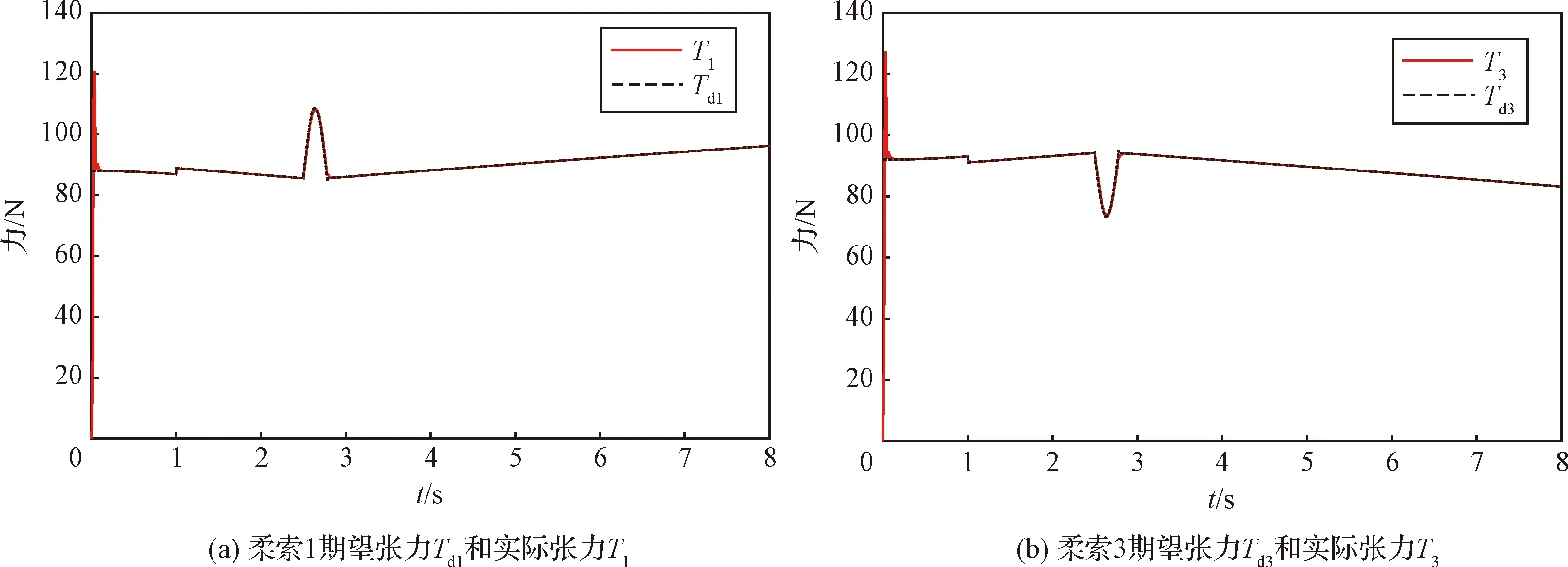
图9 物体碰撞时柔索张力变化Fig.9 Variation of cable tension when objects collide
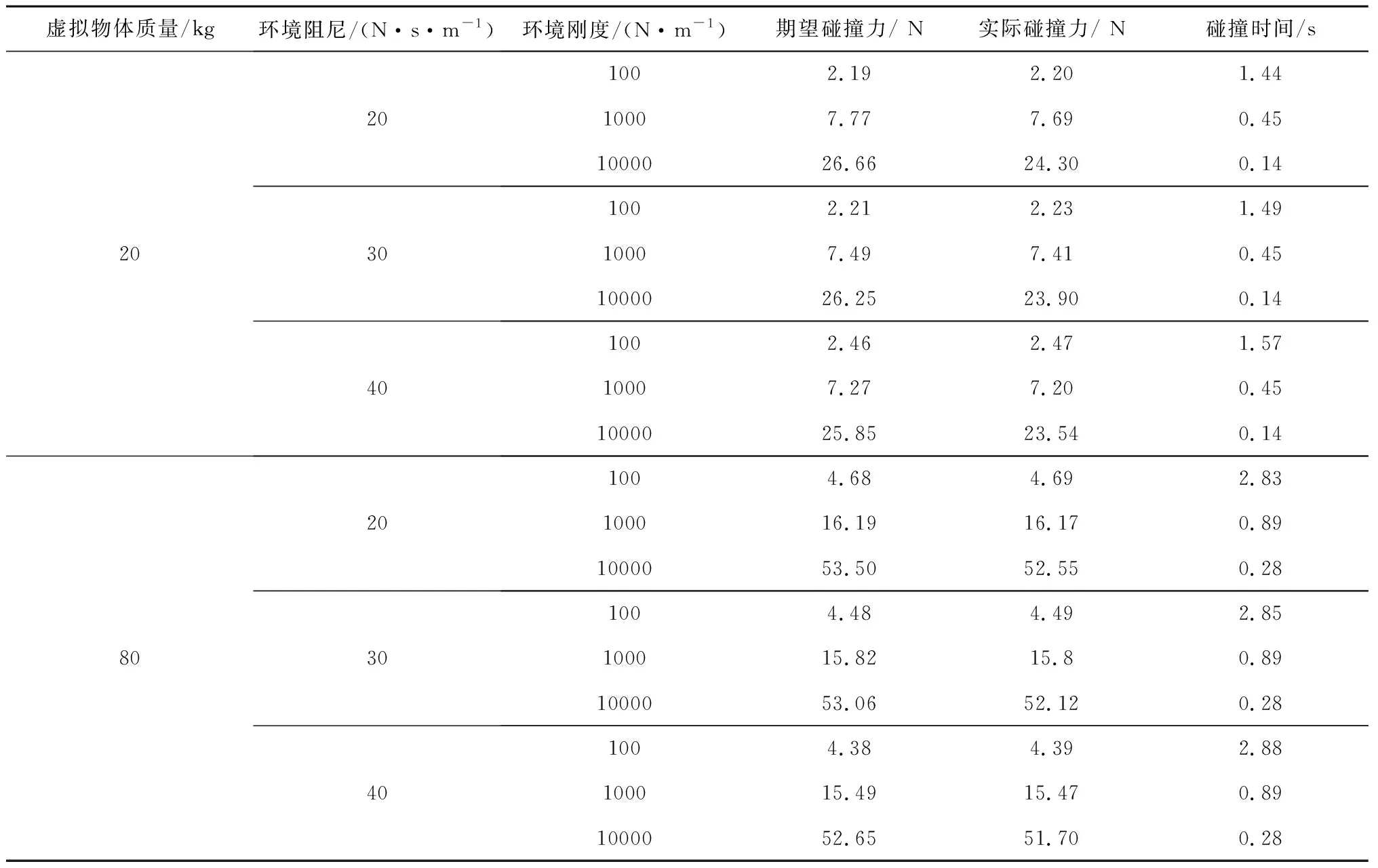
表2 不同参数变化对碰撞力和碰撞时间的影响Table 2 Effect of different parameters on collision force and collision time
4 实 验
4.1 柔索驱动单元控制实验
为了进一步验证结合干扰观测器的复合控制策略对提升主动加载精度的有效性,通过如图10所示的实验平台进行实验验证。
利用复合控制器控制柔索驱动单元,确定控制器参数Gf(s)=3,Kp=2,Ki=150,Glead(s)=(2.96×10-6s2+1.2×10-2s+1)/ (1.0×10-6s2+1.8×10-3s+1),τ=0.001,给定柔索预紧力为30 N,幅值为10 N的正弦力主动加载。正弦信号的频率1.0 Hz来观察期望加载力与实际加载力的跟踪情况。分别采用复合控制策略和结合干扰观测器的复合控制策略对柔索驱动单元进行主动加载,实验效果如图11和图12所示。
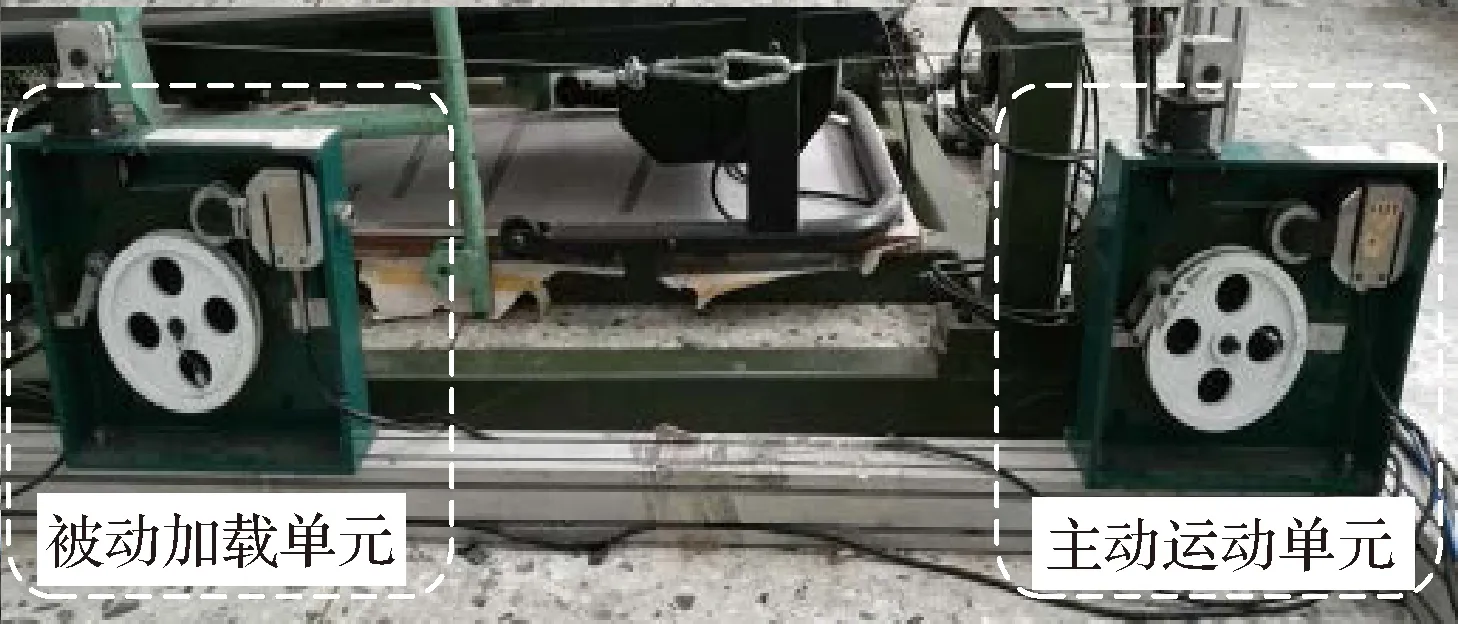
图10 柔索驱动单元主被动加载实验平台Fig.10 The experimental platform of active and passive loading
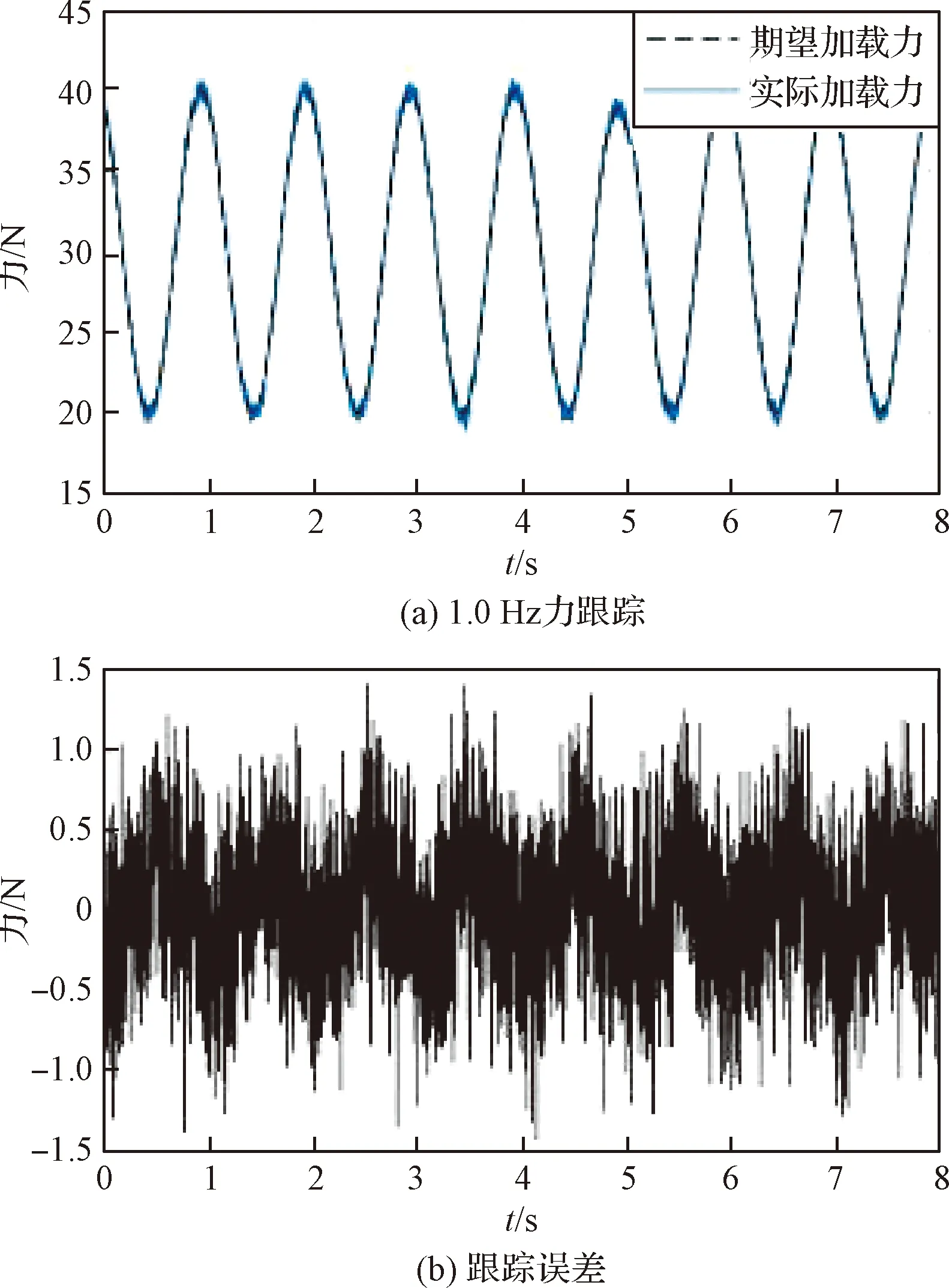
图11 复合控制策略主动加载力Fig.11 Compound control active loading
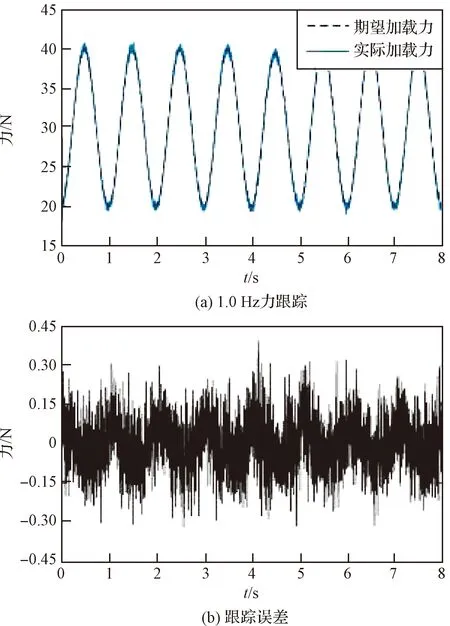
图12 结合干扰观测器的复合控制策略主动加载力Fig.12 Compound control active loading combined with disturbance observer
从图11中可以看出,当只采用复合控制策略时,给定的信号频率为1.0 Hz,最大跟踪误差值约为1.4 N,加载精度为86%。从图12中可以看出,当采用结合干扰观测器的复合控制策略时,最大跟踪误差约为0.3 N,加载精度为97%。所以,复合控制与干扰观测器结合可以提升柔索驱动单元主动加载的加载精度。
通过实验进一步验证复合控制与干扰观测器结合的控制策略对提升被动加载控制精度的有效性。首先,图10中,一个柔索驱动单元可以控制v0幅值为0.1 m/s,频率为0.25 Hz、0.5 Hz、0.75 Hz、1.0 Hz的主动正弦运动,另一个柔索驱动单元给定恒定力25 N。分别采用复合控制策略和结合干扰观测器的复合控制策略对柔索驱动单元进行被动加载,实验效果如图13和图14所示。
实验结果可以看出有干扰观测器的复合控制策略系统多余力比无干扰观测器的复合控制策略系统多余力明显降低,说明干扰观测器在被动加载时起到明显作用。统计实际系统多余力消除率,结果见表3。
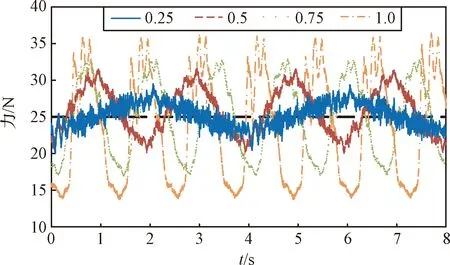
图13 复合控制器被动加载力Fig.13 Compound control passive loading
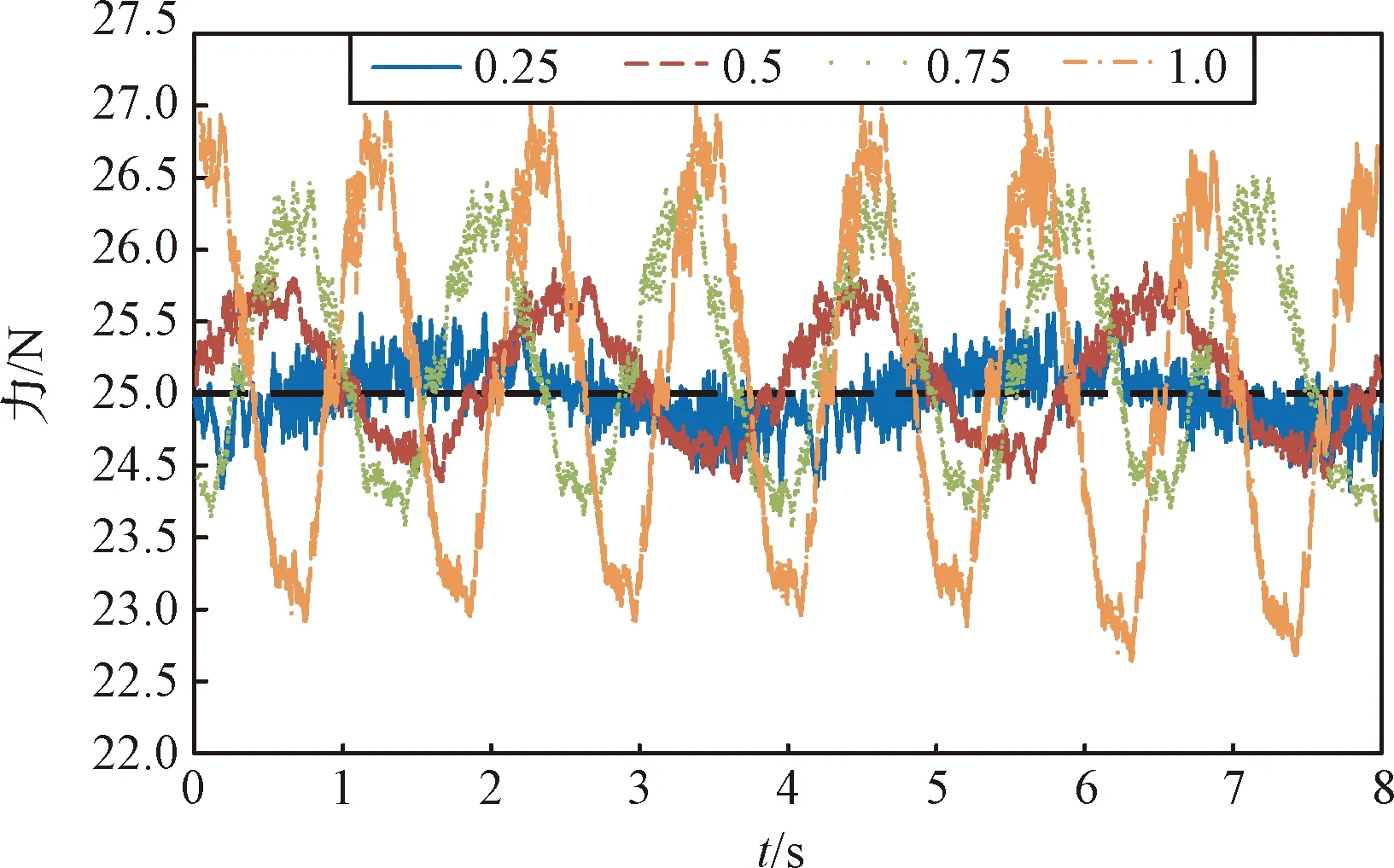
图14 结合干扰观测器的复合控制策略被动加载力Fig.14 Compound control passive loading combined with disturbance observer
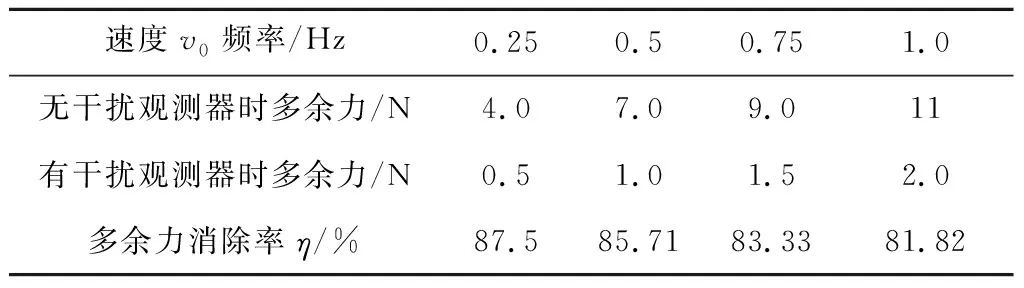
表3 柔索驱动单元被动加载复合控制实验结果Table 3 Experimental result of the hybrid control for passive loading
根据微重力环境模拟作业训练机器人的主要用途可知,柔索驱动单元既有主动加载情况又有被动加载情况。因此,采用有干扰观测器的复合控制策略对提升机器人整体系统的加载精度更具优势。
4.2 机器人系统碰撞力反馈控制实验
平面构型微重力环境模拟作业训练机器人可以用于航天员进行2个坐标轴方向上的物体推送、收回碰撞实验,1个坐标轴方向上的扭转实验,实验平台如图15所示。该实验平台由4个柔索驱动单元、6轴力觉传感器、放大器和光滑平板等部分组成。光滑平板摩擦力非常小,末端执行器质量轻,因此末端执行器与光滑平板的摩擦力可以忽略。控制柔索驱动单元模拟不同虚拟物体质量,使航天员训练环境与真实微重力环境中的感受接近。此实验的目的是检验柔索驱动单元控制策略和微重力环境模拟作业训练机器人系统碰撞力反馈控制策略的有效性。
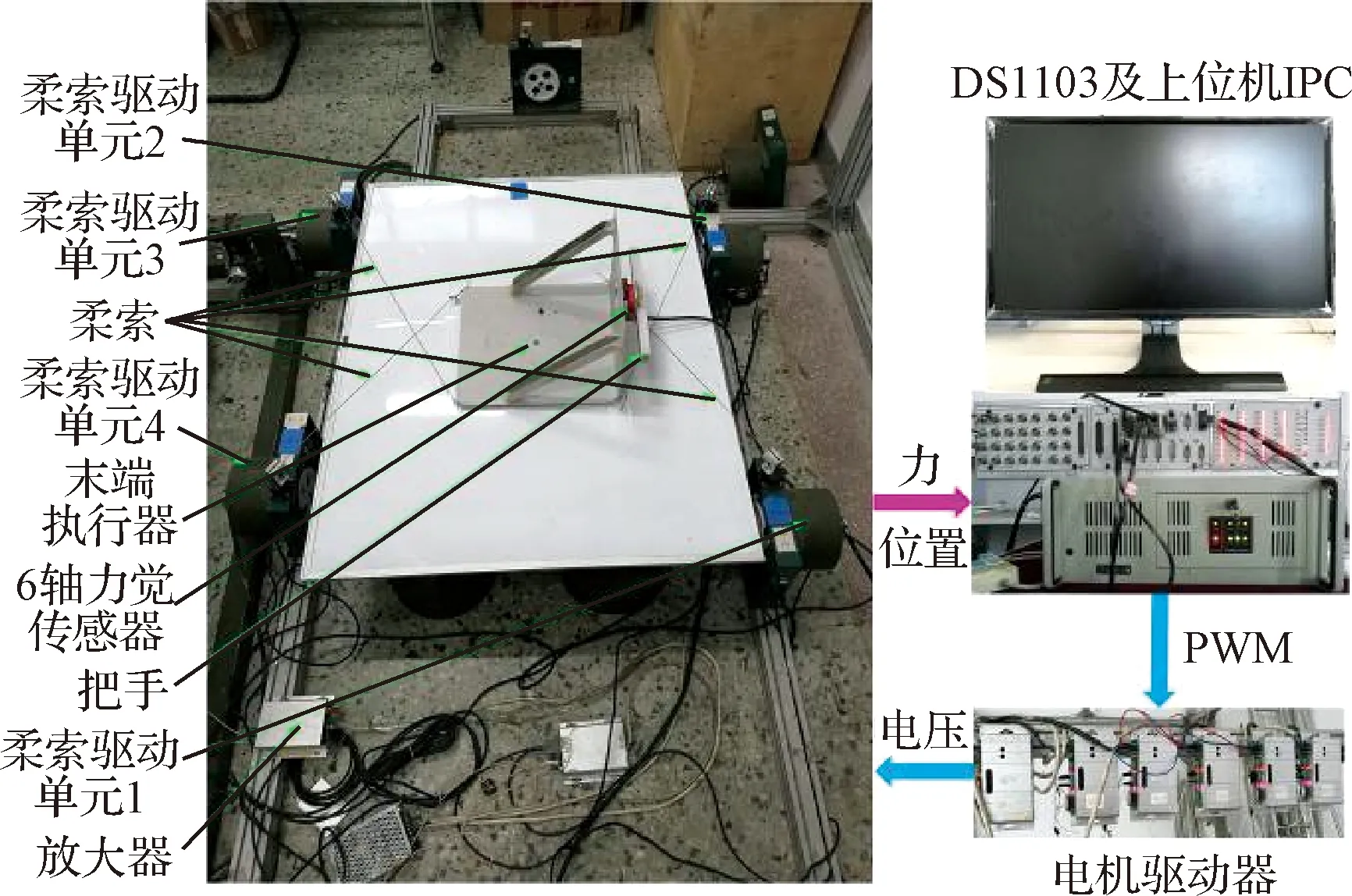
图15 平面构型机器人模拟微重力环境实验平台Fig.15 Experimental platform of planar robot simulating microgravity environment
使用图15所示的平面构型机器人模拟微重力环境实验平台模拟微重力环境中物体碰撞实验,实验时选择碰撞模式,当滑块运动到距离起始点230 mm处会与虚拟环境产生碰撞。
实验时设定虚拟环境的刚度K=10000 N/m,阻尼B=40 N/(m·s-1),当质量分别为20 kg和 80 kg 时,虚拟物体碰撞实验结果如图16和图17所示。
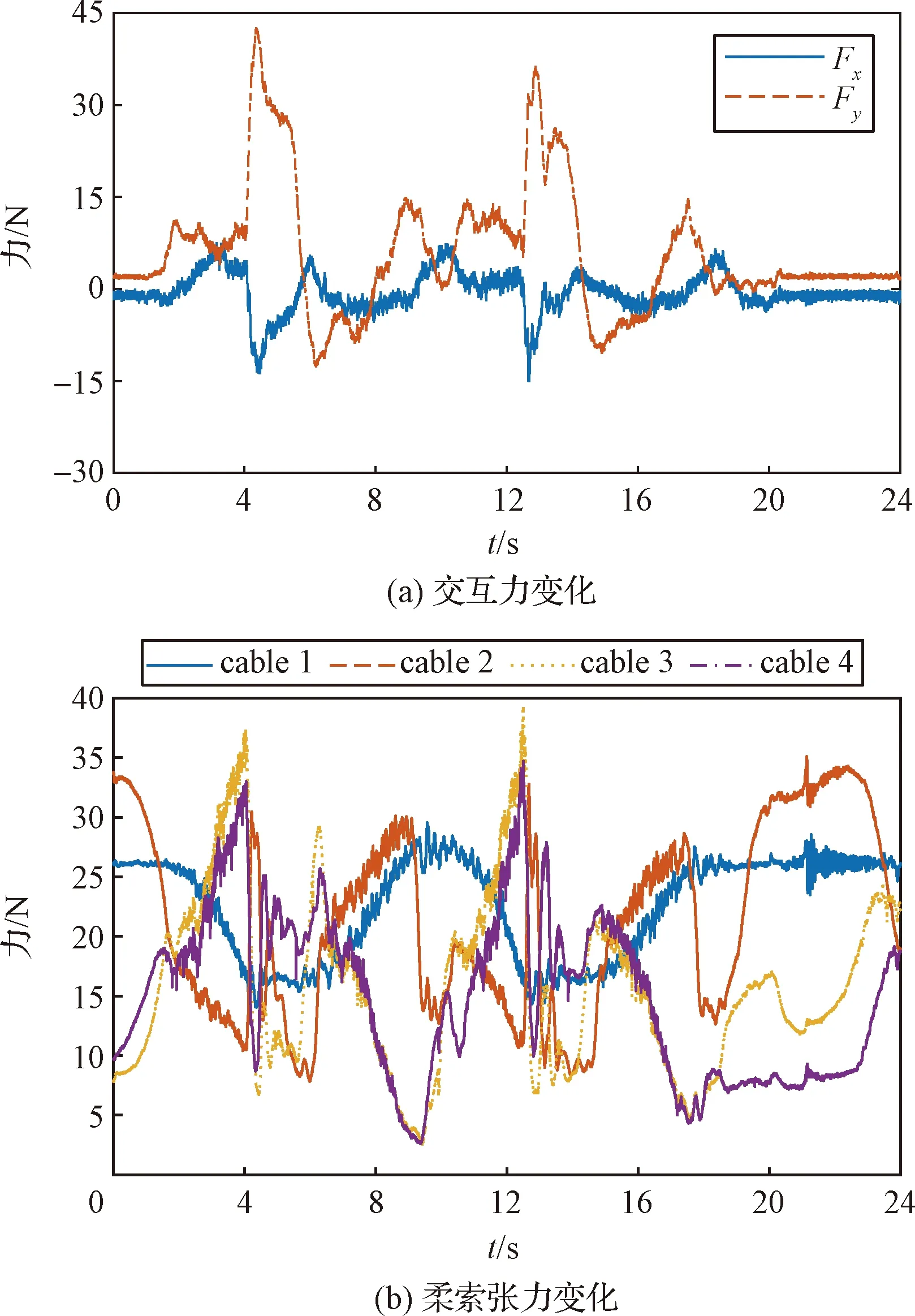
图16 20 kg虚拟物体碰撞时力学特性Fig.16 Mechanical characteristics of virtual object with 20 kg in collision
当虚拟物体质量设定为20 kg时,每次碰撞时手臂的运动速度平均约为0.08 m/s。从图16(a)可以看出,手臂推送20 kg虚拟物体发生碰撞时,手臂感受到约28 N的交互力。从图16(b)可以看出,每根柔索的张力变化连续,且每根柔索的张力均大于2.5 N。
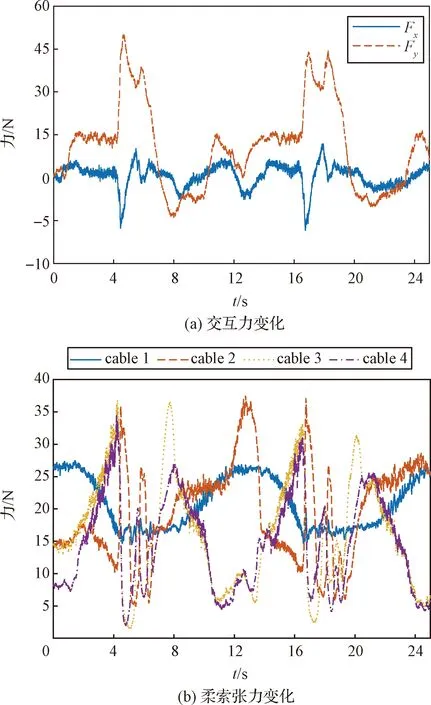
图17 80 kg虚拟物体碰撞时力学特性Fig.17 Mechanical characteristics of virtual object with 80 kg in collision
当虚拟物体质量设定为80 kg时,每次碰撞时手臂的运动速度平均约为0.06 m/s。从图17(a)可以看出,手臂感受到y轴方向约38 N交互碰撞力。从图17(b)可以看出,每根柔索的张力变化连续,且每根柔索的张力均大于2 N。
图16和图17的实验结果可以看出,碰撞力与仿真结果近似,产生误差主要是由于人体手部阻尼大于仿真设定的阻尼和手部操作过程中碰撞时间变长,说明手部操作实验结果与真实微重力环境中操作结果接近。此外,将结合干扰观测器的控制策略和碰撞力反馈控制策略用于微重力环境模拟作业训练机器人,模拟微重力环境中物体的运动,物体速度降低约0.02 m/s,但是碰撞力有所增加,碰撞过程中每根柔索的张力变化连续,进一步说明柔索驱动单元的控制策略和碰撞力反馈控制策略有效。
综上所述,平面构型的微重力环境模拟作业训练机器人随着设定的虚拟物体质量增加,完成碰撞操作的时间延长,手臂所能感受到的物体运动速度降低、交互力幅度变化加大,这是由于微重力环境中物体质量越大,惯性力越大,导致航天员控制物体难度变大。因此,可以说明平面构型微重力环境模拟作业训练机器人模拟微重力环境中物体碰撞运动特性和力学特性与真实微重力环境中的情况基本一致。
5 结 论
本文对平面构型微重力环境模拟作业训练机器人模拟的虚拟物体碰撞力反馈控制展开了研究,构建了碰撞力反馈模型、提出了柔索驱动单元控制策略和机器人系统碰撞力反馈控制策略。首先,通过Matlab/Simulink仿真验证了碰撞力模型、柔索驱动单元控制策略和机器人系统控制策略的正确性。其次,通过实验验证了基于干扰观测器的柔索驱动单元复合控制策略将柔索驱动单元主动控制精度提升11%,被动控制多余力消除率达到81.82%。最后,通过实验验证了微重力环境模拟作业训练机器人碰撞力反馈控制策略的正确性,增强了航天员训练时碰撞力临场感体验。
猜你喜欢
包装工程(2023年16期)2023-08-25 11:32:42
军事文摘(2023年4期)2023-03-22 08:44:26
军事文摘(2022年8期)2022-05-25 13:29:16
载人航天(2021年5期)2021-11-20 06:04:34
广东教育·职教版(2021年7期)2021-08-23 04:20:50
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:14
军事文摘(2019年18期)2019-09-25 08:08:58
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
计算机测量与控制(2017年6期)2017-07-01 16:23:22