
禾赛P40激光雷达在特高压并行线路三维扫描中的作业方式探索
2021-02-19 01:48:44李云奇杜亚明陈昊宇
智能城市 2021年24期
李云奇 杜亚明 陈昊宇
(江苏省测绘工程院,江苏南京 210013)
随着科技不断发展进步,无人机搭载三维激光雷达扫描设备丰富了架空线路运检手段,可以采集大量的基础点云数据,为通道数字化提供数据支撑。目前,激光雷达主要分为机械式激光雷达、半固态式激光雷达以及固态式激光雷达,而不同测程的雷达之间价格差异较大,选取经济合适的雷达是许多项目执行者重点关注的问题。文章针对特高压并行线路通道三维激光扫描,探索禾赛P40雷达在该并行线路中有效的激光扫描作业方案。
1 测区概况
项目测区位于江苏淮安境内,主要为丘陵地形,地势高差较大。测区内包括1 000 kV和800 kV特高压并行线路,两条线路内侧边导线间距约60 m。1 000 kV特高压架设杆塔大部分约100~120 m,800 kV杆塔高度大部分为60~80 m。
测区并行线路示意图如图1所示。
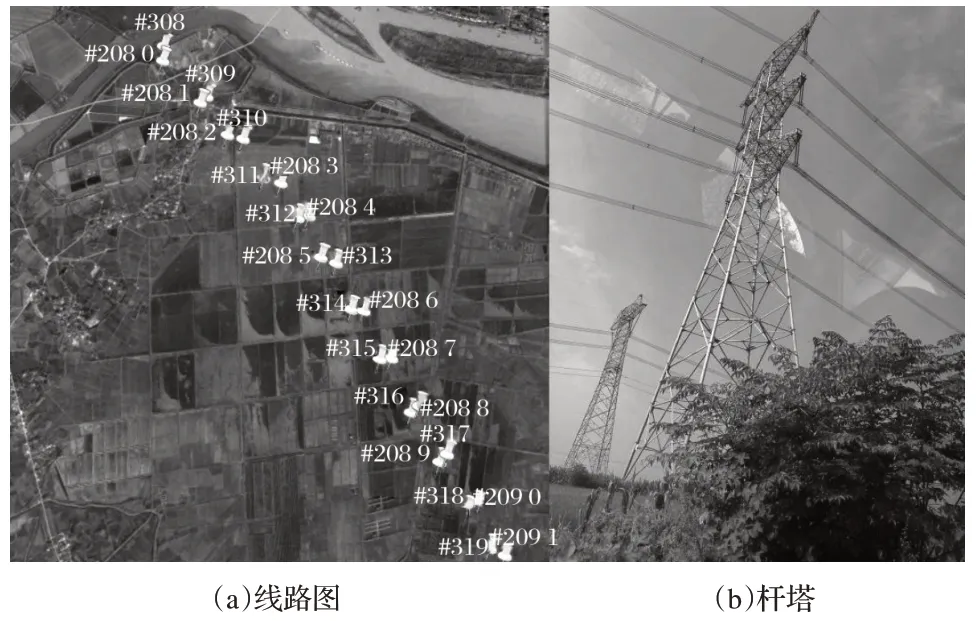
图1 测区并行线路示意图
2 硬件设备及后处理软件介绍
本次测试使用的飞行平台为飞马D300多旋翼无人机,在飞机前端加配了图传设备,便于空中实时监视航路情况。激光设备为禾赛Pandar40P的40线激光雷达,无人机激光扫描系统单架次实际最大飞行时间约22 min,数据后处理主要为飞机轨迹解算和雷达数据解算,分别在IE软件和飞马无人机管家中实施。
无人机激光扫描系统如图2所示。Pandar40P性能参数如表1所示。

图2 无人机激光扫描系统
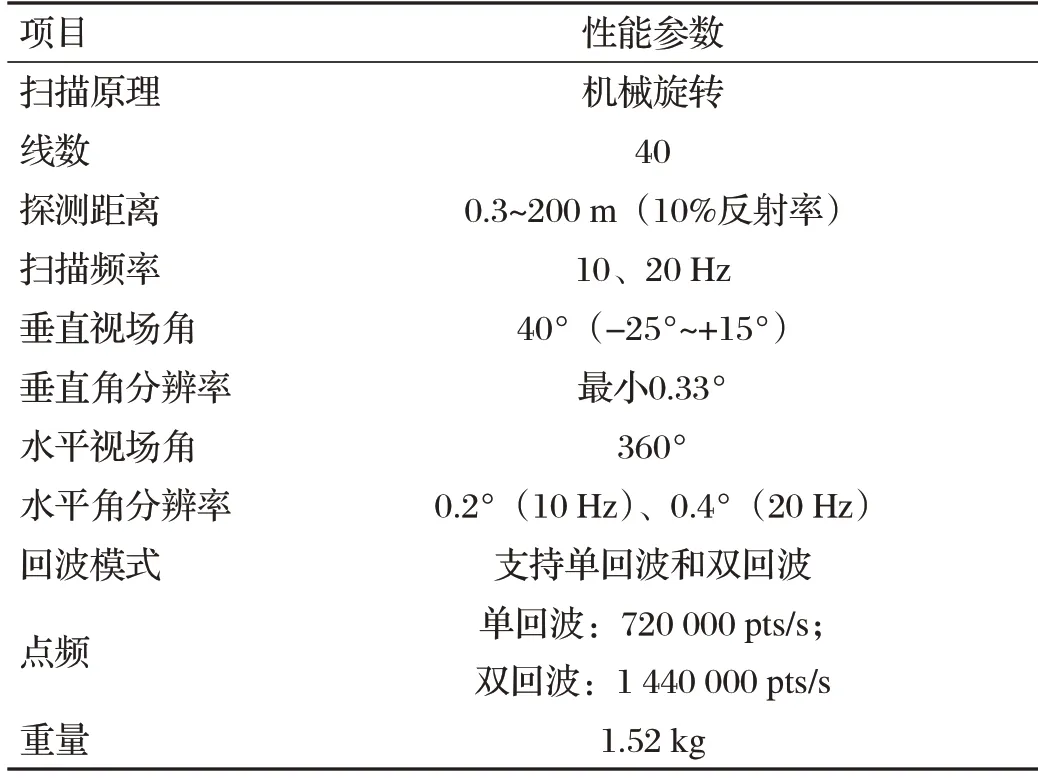
表1 Pandar40P性能参数
3 作业方案分析
为了保证作业过程中特高压输电线路的安全,所有飞行严禁在输电线路上方和两条并行线路内侧进行,无人机距离输电线塔顶和边导线两侧各需要保持15 m以上的安全距离。
为了有效获取两并行线路有效的激光点云,1 000 kV塔杆高度普遍比800 kV塔杆高一些,方案在1 000 kV塔杆中应用的扫描效果较好时,可以保证800 kV的效果理论上也没有问题。
(1)方案一。
针对800 kV和1 000 kV的并行线路,目标为仅获取1 000 kV单线路点云数据,设计方案为边导线两侧各20 m,距塔顶高20 m,飞行速度为5 m/s的自主飞行方式。
1 000 kV塔杆点云(方案一)如图3所示。
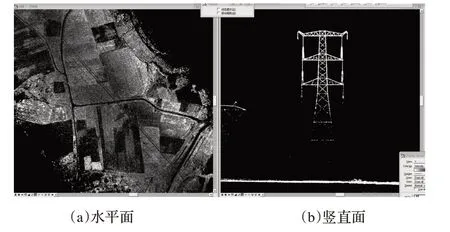
图3 1 000 kV塔杆点云(方案一)
由图3可知,1 000 kV塔杆的中下部明显未获得有效点云数据,不能满足要求。
(2)方案二。
针对800 kV和1 000 kV的并行线路,仅获取1 000 kV单线路的点云数据。在方案一的基础上,降低高度,飞行高约80 m,距离边导线20 m,飞行速度为5 m/s的方式加密采集点云数据。
1 000 KV塔杆点云(方案二)如图4所示。
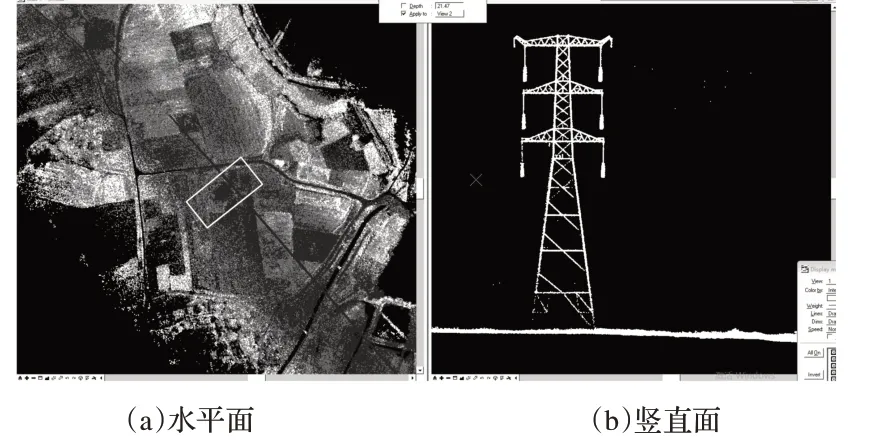
图4 1 000 KV塔杆点云(方案二)
由图4可知,与方案一相比,方案二成果中,1 000 kV塔杆的中部改善较明显,但塔杆底部仍未获得有效点云数据,也不能满足要求。
(3)方案三。
针对800 kV和1 000 kV的并行线路,仅获取1 000 kV单线路的点云数据,在方案二的基础上,继续降低高度,飞行高约60~65 m(中相导线与下相导线之间),在塔基位置处增加两点悬停。
1 000 kV塔杆点云(方案三)如图5所示。
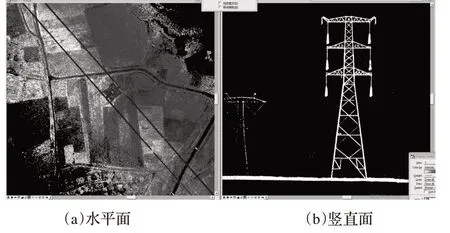
图5 1 000 kV塔杆点云(方案三)
由图5可知,成果中1 000 kV塔杆所有结构均能够扫描清晰,能够满足1 000 kV特高压塔杆的采集要求。按照前面的分析,采用同样的飞行方式应能够有效获取800 kV特高压塔杆的点云数据。故设计了方案四。
(4)方案四。
针对800 kV和1000 kV的并行线路,同时获取800 kV和1 000 kV单线路的点云数据,结合方案三的设计,采用4条航线飞行方式(右侧杆塔为1 000 kV杆塔,左侧为800 kV,红色圆圈和黄色圆圈为飞行位置示意处)。
并行线路飞行如图6所示。800 kV塔杆点云如图7所示。1 000 kV塔杆点云(方案四)如图8所示。
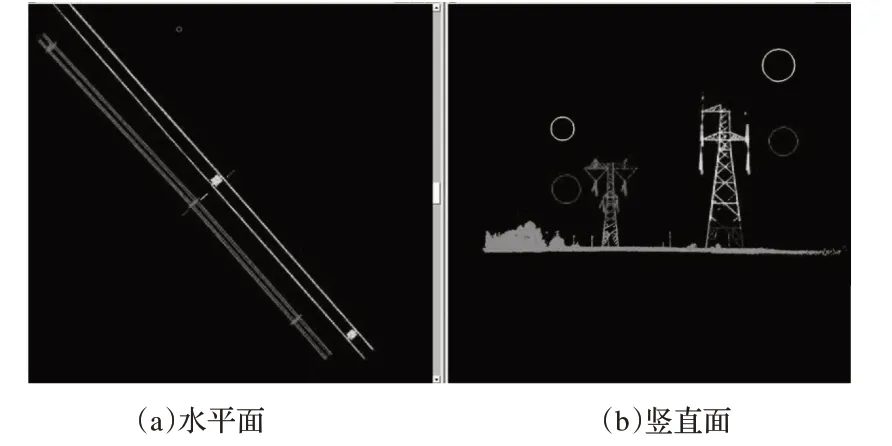
图6 并行线路飞行
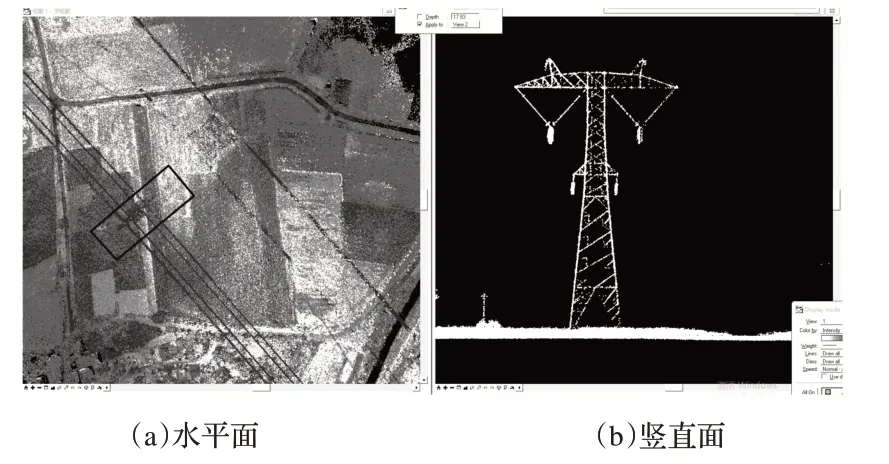
图7 800 kV塔杆点云
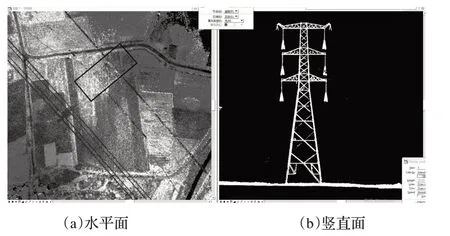
图8 1 000 kV塔杆点云(方案四)
方案四能够有效获取特高压并行线路的点云数据,成果满足要求。
4 结语
本文改进作业方案,在利用现有激光雷达基础上,满足项目成果需求,避免更换大测程激光雷达带来的高额经济负担,节约项目成本,为后续特高压并行线路开展激光扫描探索出了一条有效的作业路径。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
山东煤炭科技(2022年6期)2022-07-14 03:10:40
汽车观察(2021年8期)2021-09-01 10:12:41
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
中国交通信息化(2019年1期)2019-03-26 06:43:46
测绘通报(2018年10期)2018-11-02 10:07:28
电子制作(2018年16期)2018-09-26 03:27:00
电测与仪表(2017年16期)2017-12-19 05:05:54
科技与创新(2014年18期)2014-11-12 21:55:38
