
酿酒葡萄清土起藤机刮板与防寒土相互作用研究
2021-02-19 05:37杨启志赫明胜施爱平赵晓琪
农业工程学报 2021年22期
杨启志,赫明胜,施 雷,施爱平,赵晓琪
酿酒葡萄清土起藤机刮板与防寒土相互作用研究
杨启志,赫明胜,施 雷,施爱平,赵晓琪
(江苏大学农业工程学院,镇江 212013)
中国西北酿酒葡萄主产区春季的清土起藤作业机械化刚刚开始,针对目前单刮板清土部件作业整机功耗高,清土效率低以及缺乏与防寒土动态作用的理论研究等问题,该研究提出了刮板式清土机的设计理论及方法,并设计了一种双刮板式清土起藤机。首先,根据中国西北葡萄种植地区清土农艺要求,确定刮板的数量及外形尺寸,然后通过理论分析大刮板的受力,确定影响其工作阻力的主要因素,并通过EDEM离散元仿真,对设计的具有不同曲面形式、切削角及倾斜角的刮板进行土壤离散颗粒群与机械刮板相互作用仿真,分析刮板壅土情况和土壤颗粒群的流动规律,然后设计三因素三水平的正交试验,以壅土量为评价指标获得刮板的最佳工作参数,并进行了台架试验验证。结果表明当刮板曲面为抛物线、切削角为55°、倾斜角为60°时,刮板壅土量最少为43.2 kg,清土效果较佳,与仿真结果一致;加工一台双刮板式物理样机并进行了田间试验,与传统单刮板式清土起藤机进行对比试验,结果表明双刮板式清土起藤机的清土率为75.03%,比传统单刮板清土起藤机提高了27.2个百分点,新研制的刮板相对传统刮板壅土量降低了38.74%。研究结果可为后续研制葡萄藤清土起藤机提供技术参考和理论依据。
农业机械;试验;刮板;双刮板清土起藤机;EDEM;壅土量
0 引 言
中国葡萄的栽植面积跃居于世界第二位,并成为了世界第一葡萄产量大国,位于中国宁夏地区的贺兰山东麓就处于世界葡萄种植的“黄金地带”。然而由于这些地区地理环境特殊,冬季气候寒冷干燥,为了防止葡萄藤冻伤和风干,目前主要采取了冬季埋藤和春季起藤的保护措施[1]。这使得中国西北地区的酿酒葡萄产区种植环节较为复杂,尤其是春季清土起藤环节,造成了酿酒葡萄种植产业生产成本直线上升。目前冬季覆土埋藤已基本实现机械化,然而春季清土起藤仍以人工为主,机械化程度较低[2-3],葡萄园内常见的机械清土方式为单刮板式清土,土壤壅土现象严重,增加了后续人工起藤的难度,起藤作业质量的好坏将会直接影响葡萄藤的发芽率和产果率。
因地理位置原因,国外并没有相关清土机的研究。目前,国内已有农机企业公司研制清土起藤机,如宁夏智源与宁夏大学研制了葡萄起藤自动除土机,其通过上、侧刮板配合清土[4],但是存在壅土现象严重等问题,现在葡萄园内大规模投入使用的单刮板式清土起藤机[5],其只依据农场主经验改进的,没有真正的理论设计过程,缺乏土壤颗粒群与刮板机械结构相互作用机理的研究,会导致在实际应用过程中出现壅土、清土率效率低、后续人工清土量大等问题。中国农业大学王文斌[6]设计了一种采用螺旋旋耕式的清土机,作业时机器将土壤打碎并运到垄间,并通过液压系统进行避障,但是由于整机外形尺寸过大,不易操作;中国农业机械化科学研究院刘芳建等[7]设计了一种可自动回缩的清土机,作业时通过刮土板对土壤清除,并配合搅龙将土壤输送到行间,但该机器存在整机结构设计复杂,制作成本高等问题。因此,为了加快清土起藤装备的发展,减少工作阻力和提高清土效率,有必要对刮板式清土机与防寒土的相互作用进行分析,探索刮板阻力的变化规律以及土壤的动态流动过程,形成清土起藤机械的设计理论,为系列化研究刮板式清土起藤机械打下基础。
众所周知,西北地区土壤干燥,沙性大,是典型农业工程领域的离散颗粒群,其动力学问题以及与机械结构件的动态相互作用问题一直是研究的难点。近年来,随着计算技术的发展,离散元分析法及其仿真软件EDEM已广泛应用于农业机械和采矿机械等领域。如中国农业大学马帅等[8]基于EDEM仿真研究了葡萄藤埋土的叶轮旋转式单边清土机;郑侃等[9]运用EDEM仿真与正交试验结合的方式研究反旋深松联合作业耕整机作业质量的影响因素。
因此本文根据西北宁夏地区酿酒葡萄生产作业模式,基于EDEM的土壤颗粒与刮板相互作用的研究,提出了刮板的设计理论及方法,并试制了一台双刮板式清土起藤机,拟解决传统刮板壅土严重、清土效率低等问题,为刮板式清土起藤机的设计及田间作业提供参考依据。
1 双刮板式清土起藤机设计
1.1 清土起藤机农艺要求
通过实地测量宁夏地区酿酒葡萄埋藤土垄的形状,发现土垄的横截面呈梯形,如图1a所示。土垄上宽为70~80 cm,底宽为140~150 cm,高度为60~70 cm,葡萄藤上部覆土高度为10~20 cm。宁夏地区葡萄种植的规格两行间距2为3.5~4 m,立柱间距1为7.8~8 m,葡萄藤区域宽1为40 cm,刮板单侧入土的最大深度1为50~55 cm,刮板的倾斜角为刮板与机架在前进方向形成的安装角度,如图1b所示。工作时,大量侧边覆土被大刮板刮除,并向行间输送。
1.2 整机结构及工作原理
作业时,根据葡萄园内清土起藤的农艺要求,单刮板清土后,有部分土垄塌落,用多层刮板清土,清土效果更好,但工作阻力增大,功耗变大,结构更复杂。综合考虑葡萄园间节能、清土效率及结构要求,本文选择一个大刮板,一个小刮板的双刮板来相互配合清土。大刮板为清土主部件,首先对土垄刮动,部分覆土会塌落,形成残留覆土,小刮板会对这部分剩余覆土进行清除。双刮板式清土起藤机主要由机架、双刮板部件、三点悬挂架等组成,整机结构如图2所示。双刮板式清土起藤机通过拖拉机牵引,并通过三点悬挂架进行整体的抬升与下降。大刮板横向伸缩装置固定在机架下方,可以调节大刮板横向清土宽度。大刮板安装在伸缩装置的一端,清除大部分覆土。小刮板伸缩装置安装在机架侧后方,可以调节横向清土宽度,其主要技术参数如表1所示。
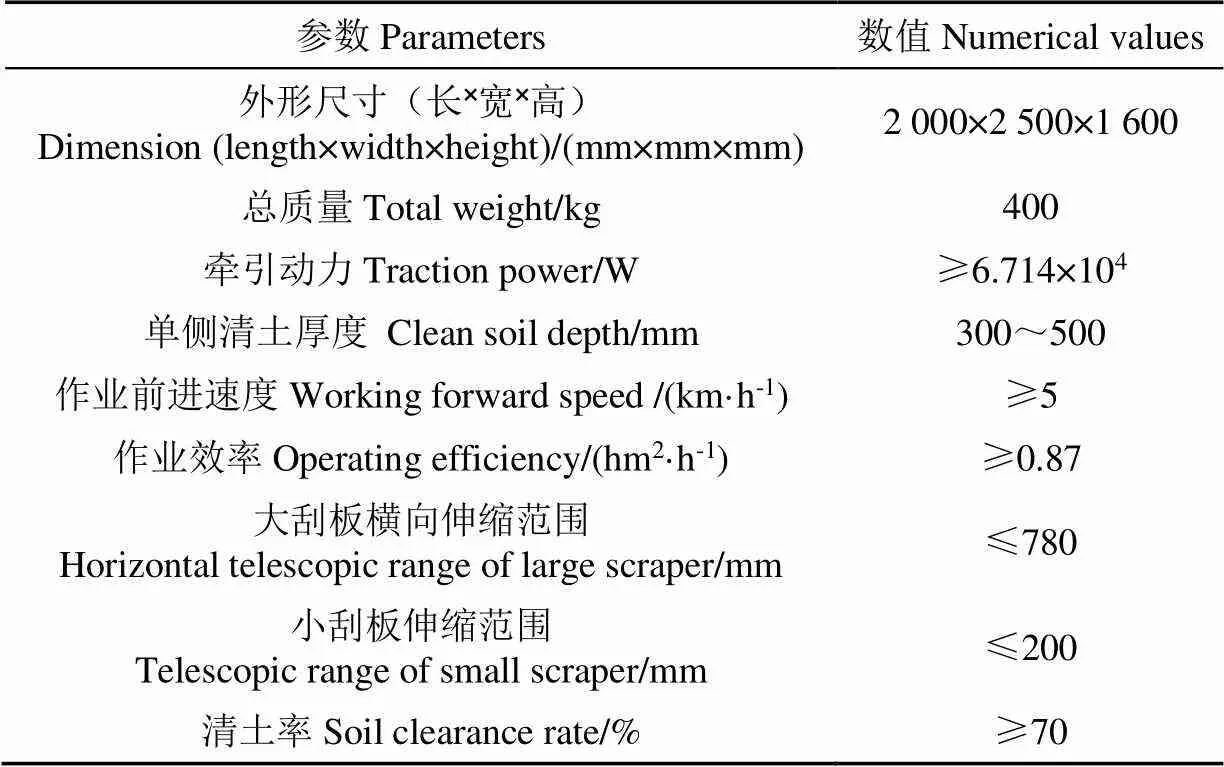
表1 双刮板式清土机主要技术参数
1.3 刮板分析及结构设计
1.3.1 刮板设计
根据农艺要求,在作业过程中刮板不能存在壅土严重的现象。刮板设计主要集中在刮板与土壤相互作用的研究,目前常见的刮板曲面准线有直线、圆弧线、抛物线、渐开线等几种形式[10-11]。当刮板曲面是直线时,准线曲率恒为零,土壤流动性很差,壅土严重。后续将通过试验和仿真结合的方法验证圆弧线,抛物线以及渐开线等不同曲面形式的刮板对于壅土量的影响。
根据葡萄藤土垄的尺寸及田间作业要求,设计大刮板高度=600 mm,小刮板高度为300 mm,在这一高度下清理的覆土理论上不会翻过刮板上方。为了将覆土运送到行间,设计大刮板长度为1 400 mm,小刮板不需将土壤输送到行间,设计长度为600 mm。曲面厚度和曲面的圆弧半径一般由实际工作的经验获得。切削角是指刮板铲尖与水平面的夹角,对刮板铲土性能的影响较大,依据参考文献[12-14],通常取50°~60°。前翻角指土壤在刮板表面不断堆积并向前翻起的角度,一般取65°~75°。在刮土板的剖面内,以铲尖为坐标原点,铲尖与上顶点竖直方向上的连线为轴,刮板底部为轴,垂直于、轴的方向为轴。大刮板与小刮板设计方式相同,只是高度与长度等尺寸有所不同,故本文以大刮板为例进行分析,其结构参数如图3所示。
1.3.2 刮土板触土曲面参数方程建立
根据上述分析,选取刮板曲面准线为圆弧线、抛物线以及渐开线3种参数方程建立数学模型,其曲面的参数方程如表2所示。
如图4a为圆弧形刮土板在不同切削角下的准线示意图,结果表明不同切削角刮土板准线形式相差较大,曲线弧度有较大的差距,圆弧半径不同。在切削角相同时,不同形式的准线相差较大,以50°切削角为例,作3种类型曲线图的图像,如图4b所示,后续需要对不同刮板的曲面进行分析。
1.3.3 触土曲面的准线曲率
不同曲率的刮板将会对土壤的流动性起着至关重要的作用,因此通过曲率反映曲线的不同变化,曲率的表达式为
根据式(1)计算,得到9种刮土板的曲率变化规律。当曲线的准线形式相同时,随着切削角的增大,曲线的曲率值逐渐减小,切削角为50°时曲率最大,切削角为60°时最小。

表2 刮板曲面的参数方程
注:为函数自变量。
Note:is the function argument.
1.3.4 刮板工作阻力分析
以机器的前进方向为轴,本文以大刮板为例,大刮板的受力示意图所图5所示,因西北宁夏地区土质以沙壤土为主,并无大石块,残根等杂物,故在实际工作过程中,切削刃处阻力较小[17-18],在后续分析过程中忽略其阻力带来的影响。
由刮板的受力图5可知


由于宁夏地区冬季寒冷干燥,防寒土含水率极低,故忽略土壤在刮土板上产生的粘结力,因此刮板工作时所受的阻力为

根据上述分析可知,刮板所受的工作阻力主要来自于土壤的法向压力,当土壤流动性差时,刮板壅土严重,法向压力会随之增大,土壤在刮板表面的流动性与刮板的曲面形式、曲率以及刮板的倾斜角有关,因此本文基于EDEM模拟刮板的清土试验,比较刮板在不同曲面形式、切削角以及刮板倾角下的清土效果,在保证清土效果的前提下找到较优的参数组合,降低整机的功耗。
2 刮板清土过程离散元模型及结果
为了获得正常工况下刮板的受力情况,本文采用EDEM软件[19-20]对刮板式起藤机的清土过程进行模拟,找到影响刮板壅土量的最优参数组合。
2.1 土垄离散元模型
本研究主要针对宁夏地区葡萄园种植基地的土壤,该种植地区土壤质地为沙土,呈松散状,土壤粘性小,经过整个冬天的沉积以及春季土垄底部的返潮,葡萄藤外表不同深度土层的防寒土有着不同的本征参数,只有通过土壤试验,才能测得不同层深土壤的本征参数,其工作量较大。为了获取西北地区不同土层的防寒土以及与接触部件(Q235钢)的离散元仿真参数,构建相对准确的EDEM仿真模型,减少试验测量的工作量,将防寒土简化分为3层,选用Hertz-Mindlin(no slip)作为接触模型,采用堆积角试验和直剪试验,并结合Plackett-Burman方法确定显著因素、最陡爬坡试验缩小范围、Box-Behnken响应面分析法确定回归方程,逐步确定不同层土壤颗粒间的弹性恢复系数、滚动摩擦因数和静摩擦因数;通过土壤滑落试验和二因素通用旋转中心组合仿真试验获得不同土层土壤颗粒与刮板之间的弹性恢复系数、静摩擦因数和滚动摩擦因数的值,具体数值如表3所示。
在EDEM仿真过程中,如果建立的土壤模型非常大,将会导致庞大的颗粒数量,加大了仿真计算难度[21-23]。因此将土垄模型和刮板模型等比例缩小一倍,重点观察不同类型的刮板壅土情况。通过对不同深度土垄的粒径进行测量,确定不同层土壤的粒径形状,经过冬天刮板式埋藤,底层土壤含水率相对于上层土壤高,土壤间会有粘结现象,所以底层土壤采用块状三球体形状,中间层土壤采用双球体形状,顶层土壤则是由砂粒土和部分土块组成,通过测量其比例,采用单球体和三球体混合,其中单球体数量占顶层土壤70%,三球体数量占30%,土壤粒径为5 mm,Hertz-Mindlin(no slip)为接触模型。最终生成的总颗粒数为400 000个,生成的梯形土垄模型的尺寸为2 000 mm×600 mm×300 mm×300 mm(长×下底宽×上顶宽×高)。
2.2 仿真试验方案设计
根据上文分析,通过Solidworks软件对3种不同曲面类别,不同切削角的刮板建模,然后转换成STEP格式导入到EDEM中。仿真试验以刮板曲面形式()、切削角()以及倾斜角()为影响因素,并添加了一列空白列作为误差列,以壅土量()为评价指标。刮板在工作时,土壤在刮板前方不断流动,一部分土壤会从刮板一侧流出,另一部分土壤会堆积在刮板前方,当达到最大值时,刮板前方的土壤将不会发生变化,其数值称之为壅土量。结合上述对于刮板的分析,将刮板曲面形式分为圆弧、抛物线及渐开线,切削角在50°~60°之间取值,如表4所示。刮板的作用为推土以及使土壤更好的流动。倾斜角过大,刮板的推土量将会大幅度降低,倾斜角过小土壤的流动性较差,壅土现象严重,根据在葡萄园内对不同清土起藤机调研,发现其倾斜角均在30°~60°。因此选取本文的倾斜角为30°~60°。通过三因素三水平的正交试验[24-27],以最小壅土量为试验目标,确定刮板的最优参数组合。

表4 试验因素水平
2.3 仿真过程
设置刮板前进速度为1 m/s,刮板横向入土深度为300 mm,刮板材料为Q235钢。仿真试验时长为10 s,其中0~7 s为土垄模型建立时间,7~10 s为刮土作业时间,仿真过程如图6所示。当刮板前进时,土壤不断在刮板上流动,一部分土壤从刮板一侧流出,另一部分土壤会堆积在刮板前方,形成壅土。
2.4 正交仿真试验与结果分析
对不同曲面形式,倾斜角以及切削角的刮板进行单因素分析,以壅土量为评价指标。在EDEM后处理模块中设置质量检测区域,尺寸为长700 mm×宽300 mm×高300 mm,该尺寸为等比例缩小后刮板的长度和高度,在7.82 s时,刮板前方的土壤质量不在发生变化,测出稳定阶段壅土的质量。
2.4.1 单因素分析
1)不同曲面形式以及不同切削角
抛物线型刮板壅土量明显小于圆弧和渐开线刮板。当土壤在圆弧型刮板表面流动时,土壤所受的法向压力指向圆心,土壤向中心聚集不易松散,导致壅土量大。而抛物线型刮板的曲率半径不断变化,土壤在其表面流动时所受法向压力也不断变化(大小和方向),因此土壤间容易产生滑移,使土壤流动性提高,壅土量减小。同一类型刮板曲面形式,在55°切削角作用下的壅土量最少,60°切削角壅土量最大。当刮板的切削角比较小时,刮板对土壤主要是切削运动,推力作用不明显,土壤流动性差;而当刮板的切削角比较大时,刮板主要起推土作用,切削作用减弱,土壤不断挤压,导致壅土明显。
保持倾斜角60°不变,研究不同曲面形式和切削角对壅土量的影响,不同参数下的刮板壅土量如图7所示。由图中数据表明,55°切削角和抛物线组合的刮板,壅土量最小,即在作业过程中受到的阻力最小,土壤刮板表面流动性好。
2)不同倾斜角
以圆弧型刮板、切削角为55°时为例,保证入土深度不变,确保每次试验的刮土量相同,只改变刮板的倾斜角。选取稳定阶段进行对比,如图8所示。随着刮板倾斜角的增大,土壤在刮板表面流动性增强,刮板前部的壅土量减小,因此,初步确定倾斜角应该为60°。
2.4.2 仿真结果及其显著性分析
试验结果见表5。根据极差分析,影响刮板壅土量的3个因素主次顺序为:刮板曲面形式、切削角、倾斜角,其最优搭配为:抛物线型刮板、切削角为55°、倾斜角为60°,此时壅土量为39.87 kg。
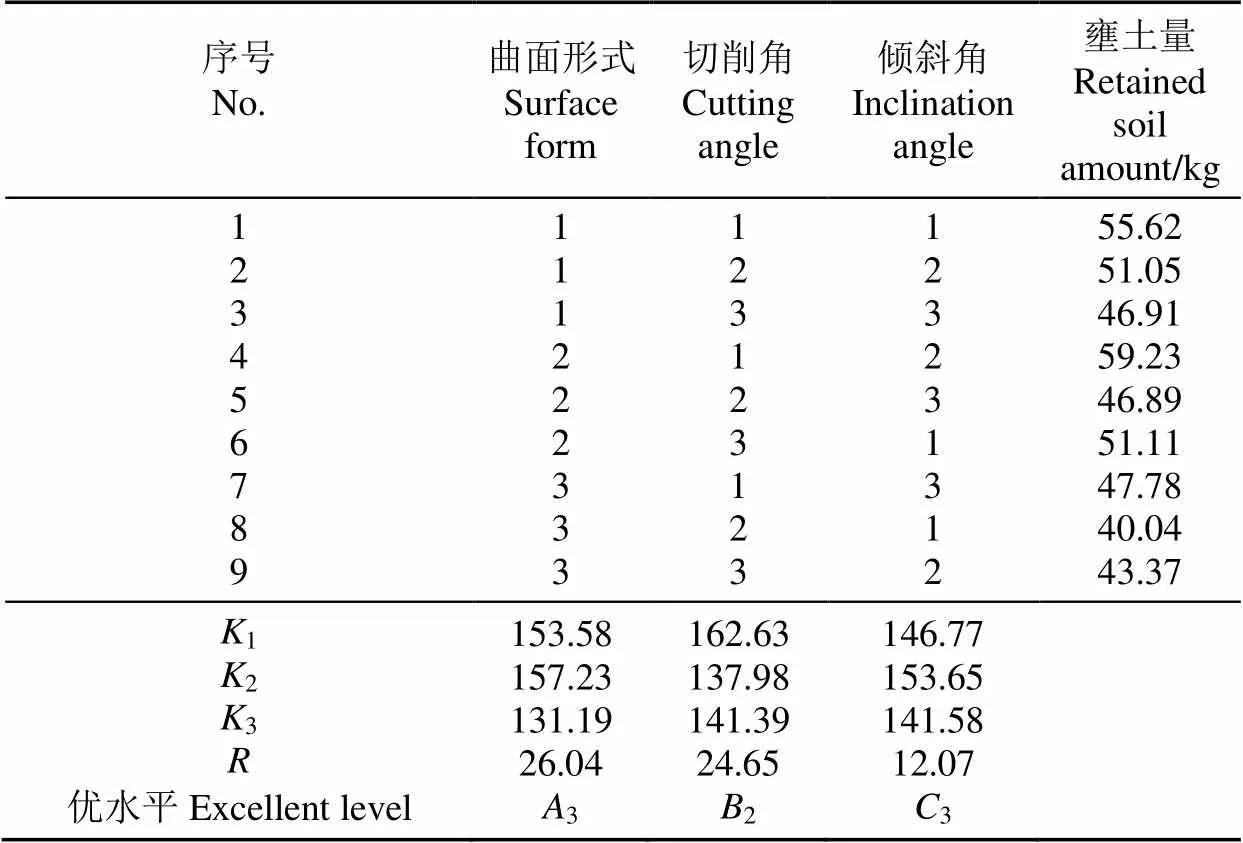
表5 刮板模型正交试验分析结果
注:1表示“1”水平所对应的试验指标的数值之和;2表示“2”水平所对应的试验指标的数值之和;3表示“3”水平所对应的试验指标的数值之和;为极差。
Note:1represents the sum of the values of the test indicators corresponding to the “1” level;2represents the sum of the values of the test indicators corresponding to the “2” level;3represents the sum of the values of the test indicators corresponding to the “3” level;is the range.
通过SPSS软件进行方差分析,由表6方差分析可知,曲面形式与切削角对壅土量的影响显著,决定系数2=0.988,调整决定系数2=0.951,表明模型可信。其中曲面形式的作用最显著,其次是切削角,方差分析结果与极差分析基本一致。
表6 方差分析
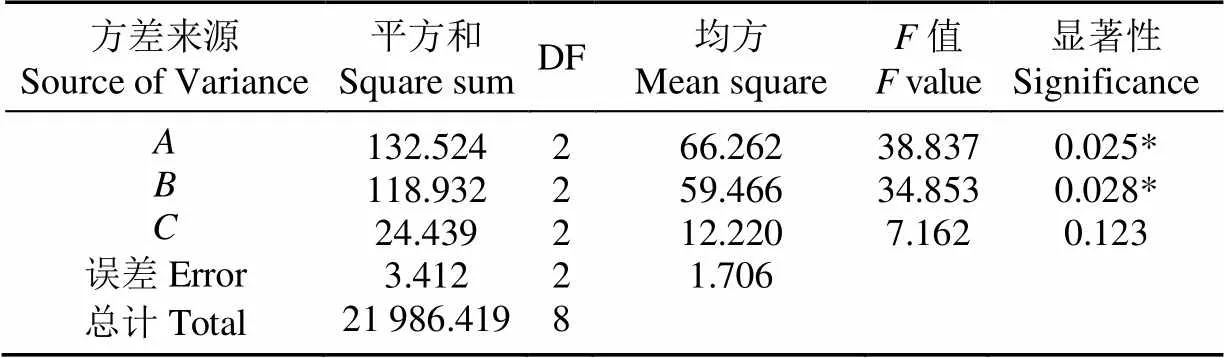
Tab.6 Variance analysis
注:*为显著标志(<0.05)。
Note: * is a significant sign (<0.05).
3 样机试制与试验
3.1 台架试验
刮板清土台架试验是通过对比不同刮板的壅土量,分析不同因素对刮板壅土的影响,获取各个因素的最优值,同时检验仿真试验结果是否正确。
3.1.1 试验材料
台架试验在江苏大学耒耜大楼农机测试实验室里完成,先在室内堆起长4 m,下宽60 cm,上宽30 cm,高30 cm的土垄,其中底层土壤深度为10 cm,中间层土壤深度为10 cm,上层土壤深度10 cm。土壤类型为沙壤土,通过松土、晾晒、洒水以及压实等操作,使不同土壤层的含水率、密度等主要参数与葡萄园内防寒土条件一致,并通过设置尺寸线,保证每次试验土垄的尺寸。将刮板安装在台架车上,台架车由电动车牵引前进,通过控制电动车调速把手改变前进速度,采用视频采集系统对土壤运动的动态过程进行数据收集,主要设备包括i-SPEED TR高速相机、BOLING摄像灯、计算机等,现场试验布置情况如图9a所示,在试验中,对稳定刮土前端的壅土进行称量,如图9b所示。
3.1.2 不同因素对壅土的影响
由仿真分析,依次对影响刮板的壅土量三个因素进行单因素分析,试验结果如表7所示。
以圆弧型刮板为例,保持前进速度1 m/s、切削角55°及入土深度不变。随着刮板倾斜角的增大,刮板前部的壅土量减小,刮板输送到侧边的土壤量随着倾斜角的增大而增加。因此,最佳倾斜角应该设置为60°。
曲面形式的改变对刮板前部土壤的流动性有很大影响,因此以切削角55°、倾斜角60°和前进速度1 m/s为不变因素,研究不同曲面形式对壅土的影响。抛物线型刮板壅土量明显小于圆弧和渐开线刮板。
切削角是影响土壤在刮板表面流动的重要因素。以圆弧型刮板为例,在不同切削角条件下,刮板前部壅土情况。控制前进速度1m/s和倾斜角45°不变,只改变切削角。当刮板的切削角比较小时,刮板主要是切削运动,推力作用不明显,土壤流动性差;而当刮板的切削角较大时,刮板主要产生推土作用,切削作用减弱,导致壅土明显。
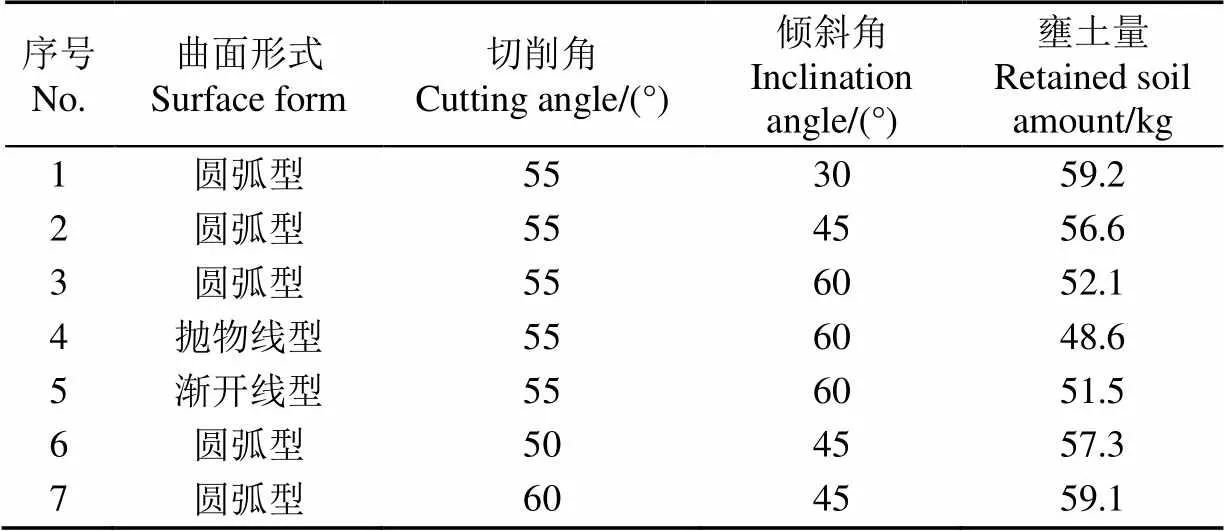
表7 不同因素刮板前方的壅土量
根据上述台架单因素试验结果,选取曲线形式为抛物线型刮板、切削角为55°、倾斜角为60°的刮板进行试验。土壤壅土量随着刮板前进而不断增加,当达到峰值时壅土量将不再变化,过量的土壤从刮板侧面流出,此时壅土量为43.2 kg,离散元仿真结果(壅土量为39.87 kg)与台架试验结果的相对误差为7.7%,与仿真结果基本一致。
3.2 样机田间试验
田间试验分别于2020年4月11日及2021年3月27日在宁夏吴忠市红寺堡酒庄进行,试验设备主要包括雷沃1104型拖拉机、酿酒葡萄双刮板式清土起藤机、卷尺、钢尺、彩旗等。试验地土壤为沙壤土,单行长度120 m,两行间距4 m,两立柱间距8 m,葡萄藤土垄截面上宽为400~600 mm、下宽为1 000~1 200 mm、总高为500~600 mm,葡萄藤上方埋土厚度100~200 mm,葡萄藤位于土垄中心两侧各200 mm,试验时,采用最优参数值,保持前进速度恒定,刮板曲面为抛物线,切削角为55°,刮板倾斜角为60°,进行双刮板式清土起藤机与单刮板清土起藤机的清土性能对比试验。
3.2.1 试验方法与评价标准
选取2行土垄分别作为双刮板和单刮板清土起藤机的清土对象,每行随机选取9个测量点,用彩旗记录每个点的位置,测量每处土垄在清土前后的上宽、下宽及高度等尺寸,并计算土垄横截面积。参照宁夏机械工程学会发布的《接触式葡萄藤清土机团体标准》,以双侧清土率≥50%对清土起藤机性能进行分析评价。清土率即清土前后土垄横截面积减小比例:
式中1表示清土前土垄横截面积,m2;2表示清土后土垄横截面积,m2。
3.2.2 试验结果与分析
双刮板式清土起藤机田间试验如图10a所示。田间情况如图10b所示,试验前,调整大刮板伸缩机构使大刮板入土深度为20 cm。双刮板式清土起藤机的清土效果如图10c所示,清土前土垄横截面为梯形,使用双刮板式清土起藤机清土后,覆土塌落明显,土垄横截面呈三角形。单刮板清土起藤机清土效果如图10d所示,土垄塌落较少,整体依旧呈梯形形状,剩余覆土较多。
清土作业前后,用卷尺测量标记点的土垄尺寸,分别计算该点清土前后的横截面积,结果如表8所示。由表可知,双刮板式清土起藤机平均清土率为75.03%,比单刮板清土起藤机的47.83%提高了27.2个百分点,可以满足评价指标。使用双刮板清土起藤机处理过的土垄的尺寸更小,剩余覆土少,清土率更高,减轻了后续人工起藤的工作量。
在实际作业中,由于存在植物的根茎以及葡萄藤的枝芽,直接测量其前进阻力会有较大的困难,故通过测量刮板前方的壅土量判断其所受阻力的大小。所以选取5垄进行试验,并在最后测量大刮板前方的壅土量,并取平均值,大刮板前方的壅土量为91.42 kg。为了保证试验的准确性,在选取的5条土垄的另一侧通过葡萄园内的传统刮板试验,并测量传统刮板壅土量为149.33 kg,优化的刮板壅土量降低了38.74%,土壤在刮板前方的流动性较好,壅土量大幅度减少,整机所受的前进阻力小。
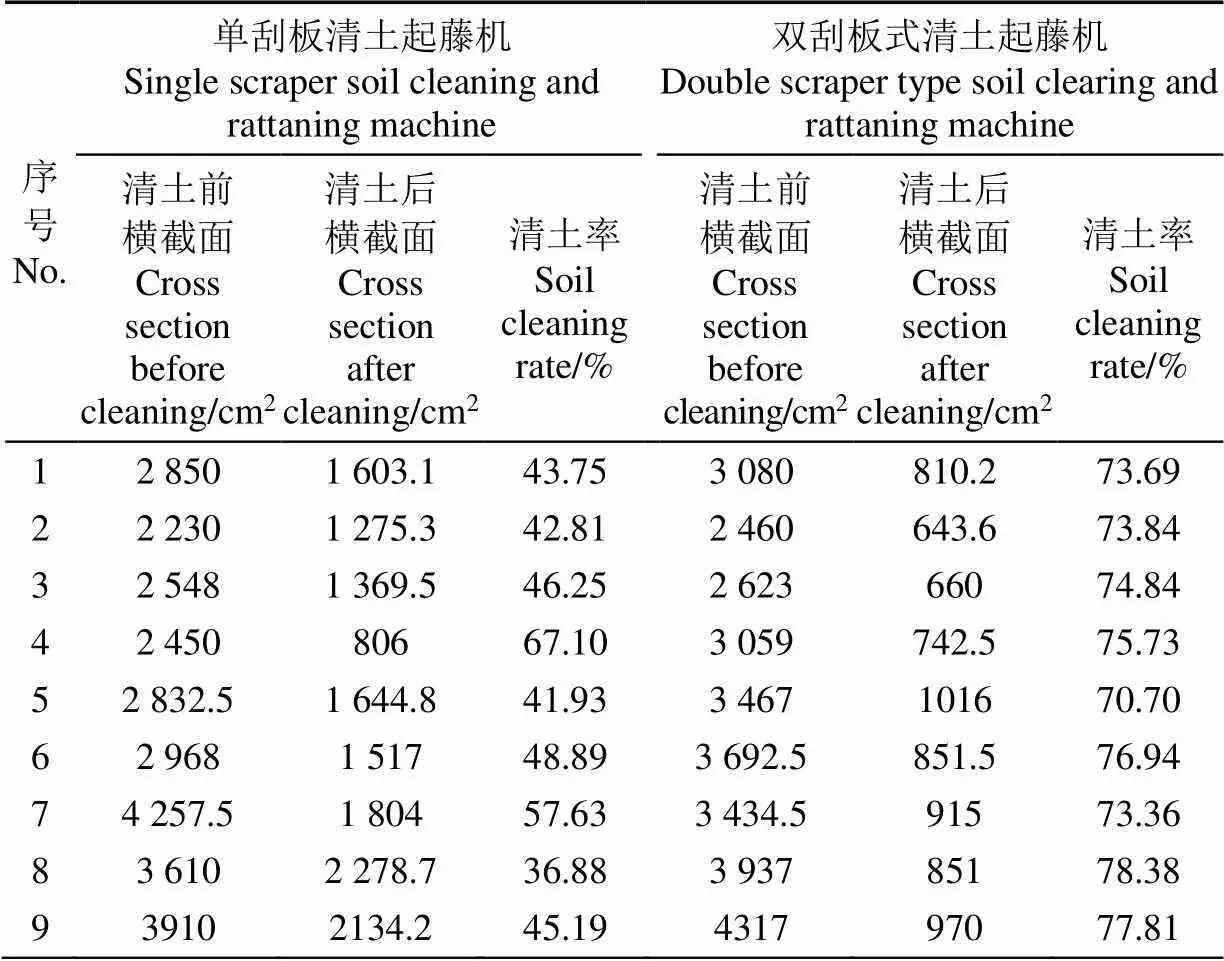
表8 清土性能试验结果
4 结 论
1)基于当前葡萄园内大规模使用的单刮板式清土起藤机缺乏刮土部件与土壤颗粒群相互动态作用的理论研究,存在土壤在刮板表面流动性差,壅土严重,清土效率低等问题,提出了一种双刮板式清土起藤机总体设计要求,理论分析刮板在工作时的受力情况,得到影响刮板壅土量的主要因素分别为刮板曲面形式、切削角及倾斜角;
2)基于EDEM的离散元仿真,以刮板曲面形式、切削角及倾斜角为试验因素,壅土量为评价指标,结果表明刮板曲面形式对壅土量的影响最为显著,当刮板曲面为抛物线、切削角为55°、倾斜角为60°时壅土量最少,并通过台架试验进行单因素分析,壅土量为43.2 kg。离散元仿真结果(壅土量为39.87 kg)与台架试验结果的相对误差为7.7%,与仿真结果基本一致。
3)试制了一台酿酒葡萄双刮板式清土起藤机样机,并将其与单刮板式清土起藤机进行清土率对比试验,试验结果表明针对宁夏地区清土作业要求,双刮板清土机清土率为75.03%,比传统单刮板清土机的47.83%提高了27.2个百分点,且大刮板相对于传统刮板在田间的壅土量减少38.74%。
[1] 马帅,徐丽明,牛丛,等. 分层交错式葡萄防寒土弧形清土叶轮的设计与试验[J]. 农业工程学报,2021,37(10):1-9.
Ma Shuai, Xu Liming, Niu Cong, et al. A facile arc impeller with layered-staggered structure to clean cold-proof soil on grapes[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(10): 1-9. (in Chinese with English abstract)
[2] 袁全春,徐丽明,马帅,等. 我国北方葡萄冬季埋土和春季清土作业的机械化现状与思考[J]. 中外葡萄与葡萄酒,2017(6):66-67.
Yuan Quanchun, Xu Liming, Ma Shuai, et al. The status quo and thinking of the mechanization of winter burial and spring soil clearing operations for grapes in northern my country[J]. Chinese and Foreign Grapes and Wine, 2017(6): 66-67. (in Chinese with English abstract)
[3] Wang Y J, Li Y S, Wang X Q, et al. The effect of climate change on the climatic regionalization of wine grapes in Northeast of China[J]. IOP Conference Series: Earth and Environmental Science, 2020, 559(1): 012008.
[4] 陈智,万平,杨术明,等. 葡萄藤起藤自动除土机[P]. CN205755312U. [2018-02-02].
[5] 张阿珊. 银川市葡萄酒产业发展存在的问题及对策[J]. 现代农业科技,2020(16):229, 239.
[6] 王文斌. 葡萄清土开沟机设计研究[D]. 北京:中国农业大学,2015.
Wang Wenbin. Research and Design of Grape Vines Gigger[D]. Beijing: China Agricultural University, 2015. (in Chinese with English abstract)
[7] 刘芳建,刘忠军,王锦江,等. 自动避障葡萄藤扒土机的设计与试验研究[J]. 农机化研究,2018,40(4):87-90.
Liu Fangjian, Liu Zhongjun, Wang Jinjiang, et al. Design and experimental study of automatic obstacle-avoid digging machine for grape vine[J]. Journal of Agricultural Mechanization Research, 2018(4): 87-90. (in Chinese with English abstract)
[8] 马帅,徐丽明,邢洁洁,等. 叶轮旋转式葡萄藤埋土单边清除机研制[J]. 农业工程学报,2018,34(23):1-10.
Ma Shuai, Xu Liming, Xing Jiejie, et al. Development of an impeller-rotating vine buried soil unilateral removal machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 1-10. (in Chinese with English abstract)
[9] 郑侃,何进,李洪文,等. 反旋深松联合作业耕整机设计与试验[J]. 农业机械学报,2017,48(8):61-71.
Zheng Kan, He Jin, Li Hongwen, et al. Design and experiment of combined tillage implement of reverse-rotary and subsoiling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 61-71. (in Chinese with English abstract)
[10] 郭志军,杜干,李忠利,等. 触土曲面形式对推土板减阻性能影响的正交试验[J]. 农业机械学报,2015,46(7):372-378.
Guo Zhijun, Du Gan, Li Zhongli, et al. Orthogonal test of the influence of the form of contacting soil surface on the drag reduction performance of bulldozing board[J]. Transactions of the Chinese Society of Agricultural Machinery, 2015, 46(7): 372-378. (in Chinese with English abstract)
[11] 杜干. 推土板宏观触土曲面减粘降阻性能试验研究[D]. 洛阳:河南科技大学,2011.
Du Gan. Experiment Research on Adhesion-reducing and Resistance-decreasing Properties of Macroscopic Soil-engaging Surfaces for Bulldozing Plates[D]. Luoyang: Henan University of Science and Technology, 2011. (in Chinese with English abstract)
[12] 杨晋生. 铲土运输机械设计[M]. 北京:机械工业出版社,1981:115-117.
[13] 曾德超. 机械土壤动力学[M]. 北京:北京科学技术出版社,1995:189-804.
[14] Godwin R J. A review of the effect of implement geometry on soil failure and implement forces[J]. Soil & Tillage Research, 2007, 97(2): 331-340.
[15] 张阳. 推土板工作过程中土壤应力波动行为研究[D]. 洛阳:河南科技大学,2015.
Zhang Yang. Research on the Stress Fluctuation Behavior of Soil in the Working Process of Bulldozing Plates[D]. Luoyang: Henan University of Science and Technology, 2015. (in Chinese with English abstract)
[16] 贾得顺. 仿生推土板准线变曲率规律及其减阻性能研究[D]. 洛阳:河南科技大学,2019.
Jia Deshun. Research on the Variable Curvature Law of Directrix and Drag Reduction of Bionic Bulldozing Plates[D]. Luoyang: Henan University of Science and Technology, 2019. (in Chinese with English abstract)
[17] 孙一源,高行方,余登苑. 农业土壤力学[M]. 北京:中国农业出版社,1985.
[18] 吉尔(W. R. Gill),(美)范德伯奇(G. E. VandenBerg)译;耕作和牵引土壤动力学翻译组编. 耕作和牵引土壤动力学[M]. 北京:中国农业机械出版社,1983
[19] 马帅,徐丽明,袁全春,等. 自动避障式葡萄藤防寒土清土机研制[J]. 农业工程学报,2020,36(7):1-10.
Ma Shuai, Xu Liming, Yuan Quanchun, et al. Development of an automatic obstacle-avoidance-type vine anti-cold soil cleaner[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(7): 1-10. (in Chinese with English abstract)
[20] 樊昱. 基于离散元法的马铃薯挖掘机理研究及仿生铲设计[D]. 沈阳:沈阳农业大学,2020.
Fan Yu. Research on Potato Digging Mechanism Based on Discrete Element Method and Design of Bionic Shovel[D]. Shenyang: Shenyang Agricultural University, 2020. (in Chinese with English abstract)
[21] 石林榕,赵武云,孙伟. 基于离散元的西北旱区农田土壤颗粒接触模型和参数标定[J]. 农业工程学报,2017,33(21):181-187.
Shi Linrong, Zhao Wuyun, Sun Wei. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 181-187. (in Chinese with English abstract)
[22] 朴顺南,张青松,刘宏博,等. 基于 EDEM 的双翼式深松铲设计与仿真试验[J]. 广东农业科学,2014(16):182-186.
Piao Shunnan, Zhang Qingsong, Liu Hongbo, et al. Design and simulation experiment on double-wings deep-shovel based on EDEM[J]. Guangdong Agricultural Sciences, 2014(16): 182-186. (in Chinese with English abstract)
[23] 王燕. 基于离散元法的深松铲结构与松土效果研究[D]. 长春:吉林农业大学,2014.
Wang Yan. Simulation Analysis of Structure and Effect of the Subsoiler Based on DEM[D]. Changchun: Jilin Agricultural University, 2014. (in Chinese with English abstract)
[24] 吕金庆,尚琴琴,杨颖,等. 马铃薯杀秧机设计与优化[J]. 农业机械学报,2016,47(5):106-114.
Lv Jinqing, Shang Qinqin, Yang Ying, et a1. Design optimization and experiment on potato haulm cutter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 106-114. (in Chinese with English abstract)
[25] 李超,邢洁洁,徐丽明,等. 柔性梳脱式酿酒葡萄脱粒机构设计与试验[J]. 农业工程学报,2015,31(6):290-296.
Li Chao, Xing Jiejie, Xu Liming, et al. Design and experiment of wine grape threshing mechanism with flexible combing striping monomer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 290-296. (in Chinese with English abstract)
[26] 王云霞,张东兴,杨丽,等. 液压激振源自激振动深松机深松单体设计与试验[J]. 农业工程学报,2018,34(11):40-48.
Wang Yunxia, Zhang Dongxing, Yang Li, et al. Design and experiment of hydraulically self-excited vibration subsoiler[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 40-48. (in Chinese with English abstract)
[27] 李俊伟,佟金,胡斌,等. 不同含水率黏重黑土与触土部件互作的离散元仿真参数标定[J]. 农业工程学报,2019,35(6):130-140.
Li Junwei, Tong Jin, Hu Bin, et al. Calibration of parameters of interaction between clayey black soil with different moisture content and soil-engaging component in northeast China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(6): 130-140. (in Chinese with English abstract)
Interaction between the scraper of the wine grape cleaning machine and the anti-cold soil
Yang Qizhi, He Mingsheng, Shi Lei, Shi Aiping, Zhao Xiaoqi
(212013)
Fully automatic soil cleaning and retaining operation in spring have been emerging in the wine grape-producing areas in northwest China. However, some challenges have still remained on the current single scraper soil cleaning components, such as the high power consumption of the whole machine during the operation, and the low soil cleaning efficiency. In this study, a novel double-scraper type soil cleaning machine was developed to explore the dynamic interaction with cold soil during operation in the grape-growing regions of Northwest China. The number and dimensions of the scrapers were also determined. Specifically, the overall dimensions of the machine were 2 000 mm×2 500 mm×1 600 mm (length×width×height), among which the height of the large scraper was 600 mm, the length was 1 400 mm, the height of the small scraper was 300 mm, the length was 600 mm, and the single-side soil cleaning depth of the whole machine was 300-500 mm. After that, a theoretical analysis was made to determine the force of the large scraper and its influencing factors of working resistance. An EDEM software was utilized to simulate the interaction between the discrete soil particle groups and the mechanical properties in the different scrapers with various curved surfaces, cutting angles, and inclination angles. As such, a relationship was obtained for the back soil condition of the scraper and the flow law of the soil particle groups. Then, a three-factor and three-level orthogonal test was designed to obtain the best working parameters of the scraper with the amount of back soil as the evaluation index. A single-factor analysis and a bench test were also conducted to verify the simulation. The results showed that the primary and secondary factors were the scraper surface profile, the cutting and inclination angle, in terms of the amount of back soil of the scraper. Furthermore, the best scraping performance was achieved, where the scraper curved surface was in the parabolic profile, the cutting angle was 55°, and the inclination angle was 60°, and the least amount backed soil was 43.2 kg, indicating a better consistence with the simulation. A double-scraper physical prototype was also fabricated. A comparison test was then performed on the traditional single-scraper soil cleaning and retaining machine. The test results showed that the soil removal rate of the double-scraper soil cleaning rattan lifter was 75.03 %, which was 27.2 percentage points higher than the traditional single-scraper cleaning machine (47.83 %). In response to the requirements of soil cleaning operations in Northwest China, the back soil volume of the newly developed scraper was 91.42 kg, which was 38.74 % lower than that of the traditional one in the field. The findings can provide a strong theoretical reference for the subsequent development of a scraper-type soil cleaning machine.
agricultural machinery; test; scraper; double-scraper cleaning machine; EDEM; retained soil volume
杨启志,赫明胜,施雷,等. 酿酒葡萄清土起藤机刮板与防寒土相互作用研究[J]. 农业工程学报,2021,37(22):21-30.doi:10.11975/j.issn.1002-6819.2021.22.003 http://www.tcsae.org
Yang Qizhi, He Mingsheng, Shi Lei, et al. Interaction between the scraper of the wine grape cleaning machine and the anti-cold soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(22): 21-30. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.22.003 http://www.tcsae.org
2021-07-11
2021-10-28
国家科技重大专项子课题(2019YFD1002502、2019YFD1002505);国家自然基金项目(51675239);宁夏重点研发计划重大项目(2018BBF02020);江苏省高校自然基金重点项目(19KJA430018);镇江市重点研发计划(现代农业)(NY2019015)
杨启志,博士,教授,博士生导师。研究方向为农业机器人、移栽种植、田间管理机械等。Email:yangqz@ujs.edu.cn
10.11975/j.issn.1002-6819.2021.22.003
S220.1
A
1002-6819(2021)-22-0021-10
猜你喜欢
煤炭工程(2022年8期)2022-08-24
大电机技术(2022年3期)2022-08-06
建材发展导向(2021年6期)2021-06-09
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
E动时尚·科学工程技术(2019年11期)2019-09-10
数学大世界(2018年16期)2018-07-30
卷宗(2017年16期)2017-08-30
中国科技纵横(2015年14期)2015-10-31
中学理科·综合版(2008年9期)2008-10-15
