
基于某种装卸机械的三支点全向驱动系统设计
2021-02-14 11:38:09谢义朋李志鹏傅金根
科技信息·学术版 2021年6期
谢义朋?李志鹏?傅金根
摘要:对一种基于某种装卸机械的三点布置的全向驱动系统进行原理设计、技术指标计算,分析了采用三点布置的优点以及必要性,三支点全向驱动系统具有移动灵活、操作方便、行走所需空间小、结构紧凑等特点。同时通过关键技术指标的计算为关键部件的选型提供了理论依据。
关键词:三点布置;驱动;全向;设计
随着我国经济社会的快速发展,现代化仓储技术和智能设备也迎来了高速发展,各类自动化设备几乎遍及了现代仓库的各个角落,近年来,更是有各类货物装卸设备逐步出现在仓库月台之上,此类设备通常作业的区域为狭小运载工具内部以及拥挤的月台空间,由此此类设备灵活性越来越重要,配备能够灵活运动,结构紧凑的万向行走驱动系统已经成为了此类装卸设备发展的必然选择。
1 国内全向驱动系统技术
目前,为满足设备的全向移动,国内货物装卸设备主要采用的是四轮布置的全向驱动系统,行走轮采用四个45°麦克纳姆轮,平行镜像布置,或者是四个90°全向轮十字布置。45°麦克纳姆轮是一种可以实现全方位运动的万向轮,主要由轮毂以及围绕在周边的辊子组成,轮毂轴心与辊子轴心通常呈45°夹角。全向轮由一个轮盘和固定在轮盘外周围的辊子组成,轮盘轴心同辊子轴心垂直。四轮驱动的方式通常对于四轮的平面性要求较高,需要悬挂安装,而采用悬挂通常又会带来底盘刚度不足、耗费电机资源、占用空间增大、结构复杂等问题。
2 主要结构
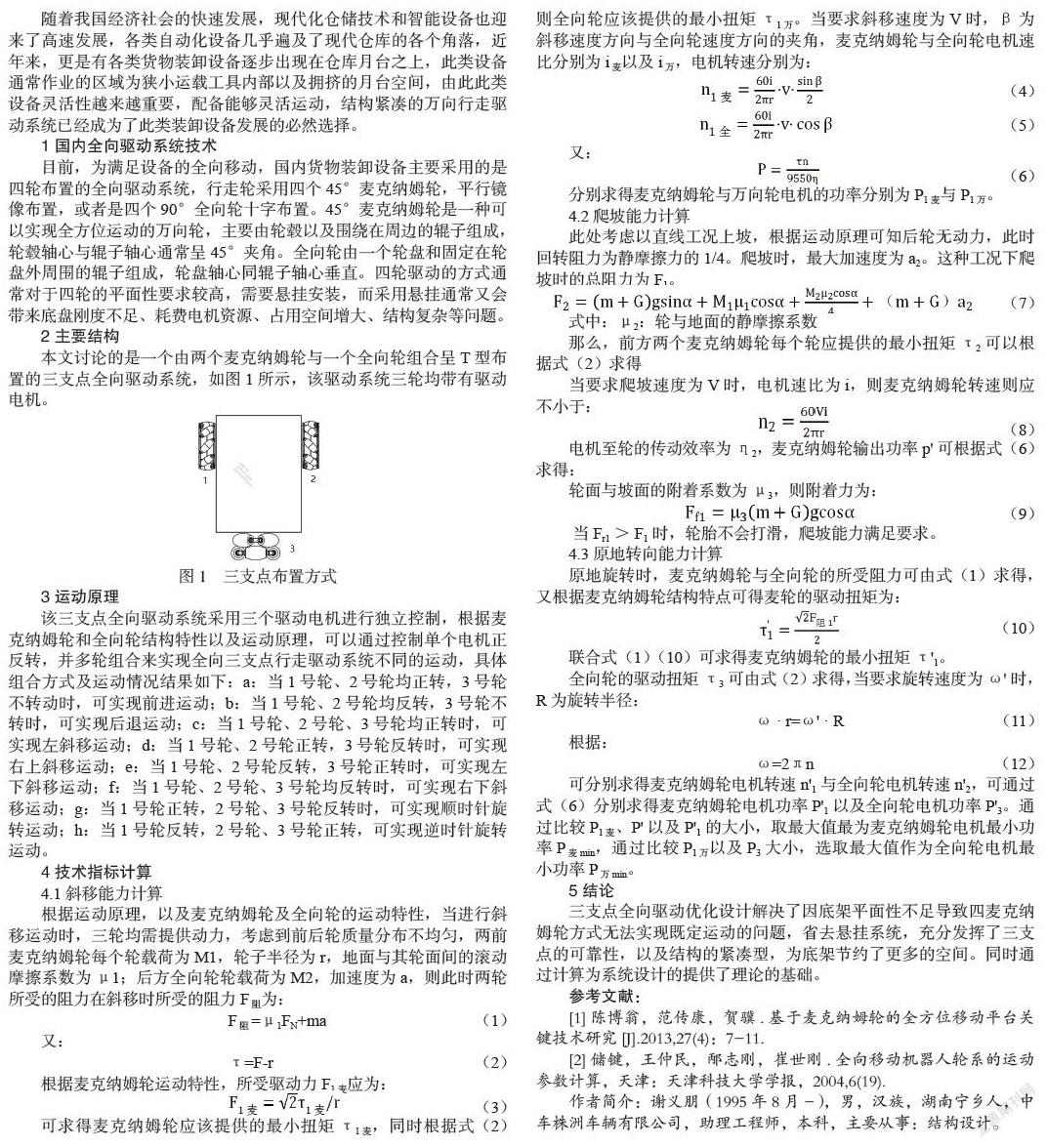
本文讨论的是一个由两个麦克纳姆轮与一个全向轮组合呈T型布置的三支点全向驱动系统,如圖1所示,该驱动系统三轮均带有驱动电机。
3 运动原理
该三支点全向驱动系统采用三个驱动电机进行独立控制,根据麦克纳姆轮和全向轮结构特性以及运动原理,可以通过控制单个电机正反转,并多轮组合来实现全向三支点行走驱动系统不同的运动,具体组合方式及运动情况结果如下:a:当1号轮、2号轮均正转,3号轮不转动时,可实现前进运动;b:当1号轮、2号轮均反转,3号轮不转时,可实现后退运动;c:当1号轮、2号轮、3号轮均正转时,可实现左斜移运动;d:当1号轮、2号轮正转,3号轮反转时,可实现右上斜移运动;e:当1号轮、2号轮反转,3号轮正转时,可实现左下斜移运动;f:当1号轮、2号轮、3号轮均反转时,可实现右下斜移运动;g:当1号轮正转,2号轮、3号轮反转时,可实现顺时针旋转运动;h:当1号轮反转,2号轮、3号轮正转,可实现逆时针旋转运动。
4 技术指标计算
4.1斜移能力计算
根据运动原理,以及麦克纳姆轮及全向轮的运动特性,当进行斜移运动时,三轮均需提供动力,考虑到前后轮质量分布不均匀,两前麦克纳姆轮每个轮载荷为M1,轮子半径为r,地面与其轮面间的滚动摩擦系数为μ1;后方全向轮轮载荷为M2,加速度为a,则此时两轮所受的阻力在斜移时所受的阻力F阻为:
F阻=μ1FN+ma(1)
又:
τ=F-r(2)
根据麦克纳姆轮运动特性,所受驱动力F1麦应为:
(3)
可求得麦克纳姆轮应该提供的最小扭矩τ1麦,同时根据式(2)则全向轮应该提供的最小扭矩τ1万。当要求斜移速度为V时,β为斜移速度方向与全向轮速度方向的夹角,麦克纳姆轮与全向轮电机速比分别为i麦以及i万,电机转速分别为:
(4)
(5)
又:
(6)
分别求得麦克纳姆轮与万向轮电机的功率分别为P1麦与P1万。
4.2 爬坡能力计算
此处考虑以直线工况上坡,根据运动原理可知后轮无动力,此时回转阻力为静摩擦力的1/4。爬坡时,最大加速度为a2。这种工况下爬坡时的总阻力为F1。
(7)
式中:μ2:轮与地面的静摩擦系数
那么,前方两个麦克纳姆轮每个轮应提供的最小扭矩τ2可以根据式(2)求得
当要求爬坡速度为V时,电机速比为i,则麦克纳姆轮转速则应不小于:
(8)
电机至轮的传动效率为η2,麦克纳姆轮输出功率p'可根据式(6)求得:
轮面与坡面的附着系数为μ3,则附着力为:
(9)
当Fr1>F1时,轮胎不会打滑,爬坡能力满足要求。
4.3 原地转向能力计算
原地旋转时,麦克纳姆轮与全向轮的所受阻力可由式(1)求得,又根据麦克纳姆轮结构特点可得麦轮的驱动扭矩为:
(10)
联合式(1)(10)可求得麦克纳姆轮的最小扭矩τ'1。
全向轮的驱动扭矩τ3可由式(2)求得,当要求旋转速度为ω'时,R为旋转半径:
ω·r=ω'·R(11)
根据:
ω=2πn(12)
可分别求得麦克纳姆轮电机转速n'1与全向轮电机转速n'2,可通过式(6)分别求得麦克纳姆轮电机功率P'1以及全向轮电机功率P'3。通过比较P1麦、P'以及P'1的大小,取最大值最为麦克纳姆轮电机最小功率P麦min,通过比较P1万以及P3大小,选取最大值作为全向轮电机最小功率P万min。
5 结论
三支点全向驱动优化设计解决了因底架平面性不足导致四麦克纳姆轮方式无法实现既定运动的问题,省去悬挂系统,充分发挥了三支点的可靠性,以及结构的紧凑型,为底架节约了更多的空间。同时通过计算为系统设计的提供了理论的基础。
参考文献:
[1]陈博翁,范传康,贺骥.基于麦克纳姆轮的全方位移动平台关键技术研究[J].2013,27(4):7-11.
[2]储键,王仲民,邴志刚,崔世刚.全向移动机器人轮系的运动参数计算,天津:天津科技大学学报,2004,6(19).
作者简介:谢义朋(1995年8月-),男,汉族,湖南宁乡人,中车株洲车辆有限公司,助理工程师,本科,主要从事:结构设计。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
高技术通讯(2021年7期)2021-08-30 08:36:52
现代信息科技(2021年21期)2021-05-07 02:54:12
房地产导刊(2020年11期)2020-12-28 01:32:30
家庭影院技术(2020年8期)2020-09-11 06:45:22
福建质量管理(2019年18期)2019-10-14 03:56:20
铁道通信信号(2019年4期)2019-10-10 03:42:56
艺术启蒙(2018年7期)2018-08-23 09:14:18
海峡姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
