基于衰减因子的分布式卫星高精度编队导航技术
2021-02-12 02:19:38张重阳
现代导航 2021年6期
黄 普,杜 凯,曹 静,张重阳
基于衰减因子的分布式卫星高精度编队导航技术
黄 普1,2,杜 凯2,曹 静2,张重阳2
(1 宇航动力学国家重点实验室,西安 710043;2 西安卫星测控中心,西安 710043)
针对分布式卫星长时间高精度编队导航问题,提出了一种基于衰减因子的自适应编队导航算法。首先,建立基于e/i矢量的编队卫星相对运动方程,其次,完成星间相对位置与相对轨道根数的转换,最后,引入自适应衰减因子,增加系统稳定性,完成高精度相对导航估计。仿真数据表明,该方法能克服模型线性化的误差,比传统的CW导航算法具有更高的构型确定精度,并且能实现长时间稳定的编队导航。
编队导航;衰减因子;相对运动; 相对轨道根数
0 引言
随着卫星技术的发展,具有协同工作的分布式编队卫星[1-2]越来越多。InSAR卫星系统[3]正是其中之一,通过编队构型,SAR天线和卫星可以有效结合,实现各种单星难以完成的功能,包括高分辨率SAR成像、地面机动目标指示等。为更好地实现这些功能,卫星相对运动的导航技术就成为研究重点。
目前对于编队相对运动导航技术的研究,主要从状态方程开展,传统的方法是基于位置速度建立CW方程[4-6]或Hill方程,但该方法存在多种假设,不满足假设条件下存在较大误差。相关学者为了提高性能,增加了摄动条件[7-8]分析,但相对摄动力的计算复杂,很难实际应用。另外一些学者提出建立相对轨道根数动力学模型[9-10],如文献[11-12]提出了一种基于e/i(偏心率/倾角)矢量的相对运动模型,该模型以绝对轨道要素为参数,推导两星相对运动,描述更加简单清楚。同时,由该模型衍生的编队构型参数可更好地用于编队控制策略计算。因此,针对该模型的相对导航算法[13]具有重要的应用前景。然而,国内外基于相对轨道根数的滤波方法研究较少,通常是直接采用UKF方法建立滤波器,对星载计算机的计算能力和长时间编队飞行过程带来的滤波发散问题均未考虑。
本文针对分布式卫星长时间高精度编队导航问题,对相对轨道动力学方程进行简化,建立了线性状态方程和观测方程,采用基于衰减因子的自适应卡尔曼滤波方法,完成导航相对估计。仿真数据比较了传统CW滤波方法与该方法,结果表明,该方法能长期稳定运行,比CW滤波方法具有更好的精度和稳定性。
1 基于e/i矢量的相对运动
1.1 相对轨道拟平根数
为方便描述编队飞行器间的相对运动,假设目标航天器为,伴随航天器为,可建立相对轨道拟平根数如式(1)所示:



根据相对轨道拟平根数建立的编队构型参数如式(5)所示:
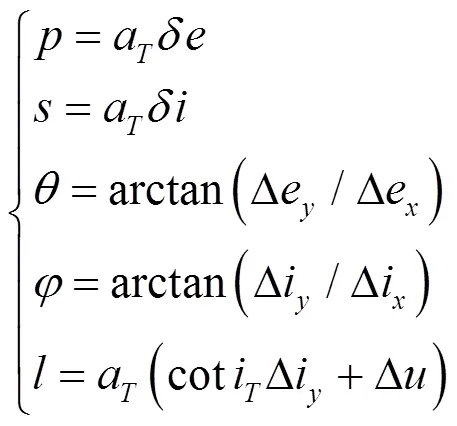
式中,为编队构型参数;为相对轨道投影到xoy平面中椭圆的半短轴;为相对轨道投影到xoz平面在z方向的最大长度;为卫星在纬度幅角为0时,xoy平面内与-x方向的夹角;为相对轨道倾角矢量的相位角;为椭圆中心距离主星的航迹向距离。这里oxyz采用相对坐标系,原点定义在主星质心,x方向为矢径方向;y方向沿速度方向;z方向为轨道面法线方向。其物理意义如图1~图2所示。

图2 编队构型在xoz平面投影
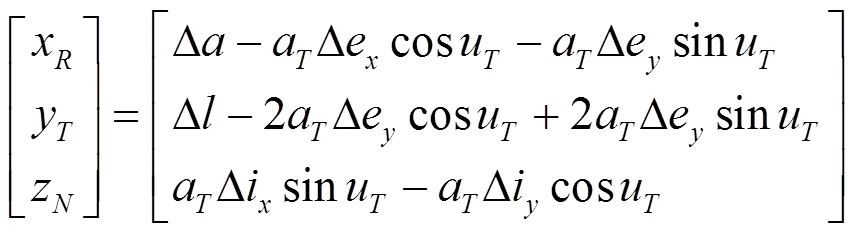
1.2 基于相对拟平根数的状态方程
编队飞行导航的关键在于建立状态方程和观测方程,基于相对拟平根数的状态方程式如式(6)所示:


2 导航滤波器观测方程

3 基于衰减因子的自适应滤波算法
传统的卡尔曼滤波算法要求已知噪声方差,而噪声的统计特性很难准确把握,此时,就无法建立高精度的数学模型,在长时间的运行中,可能导致滤波发散。即使建立了正确的模型,实际中仍会存在不确定性因素,影响滤波效果,需要对噪声统计进行实时估计。考虑到编队飞行的长时间运行特性,需要在统计中减弱历史数据的影响,增强新数据的影响,这就是基于衰减因子的自适应滤波算法。
首先建立标准卡尔曼滤波器,其流程如式(9)~式(13)所示:





式(9)通过式(6)积分获得。为了降低历史数据的影响,可在一步预测方差中增加衰减因子,将式(10)调整为式(14):







同时,为了确保系统状态方程矩阵的对称性和非负定性,有效提高系统工程应用中的稳定性,引入“Joshef form”更新方程,将式(13)调整为:

4 实验与应用

图3 编队构型平面投影
设置相对测量数据为高精度差分GPS数据,测量精度设置为0.1 m,目标星与追随星的面质比设置偏差10%。主星的初始轨道平根数为:
在滤波过程中,考虑到实际情况中差分GNSS数据可能出现中断情况,仿真测试对测量数据中断情况进行测试,并将滤波结果与传统的CW方程滤波结果进行比较。
4.1 相对测量数据始终可用
按照仿真条件分别采用CW滤波器和本文提出的滤波器进行计算,相对导航确定误差结果如图4所示。基于相对轨道要素的滤波方法构型参数确定精度高于基于相对位置速度的方法。

4.2 相对测量数据连续中断
按照工程实际,设置相对测量数据间歇性中断,平均为1小时中断10分钟,同样采用两种滤波器进行计算,得到的结果如图5所示。
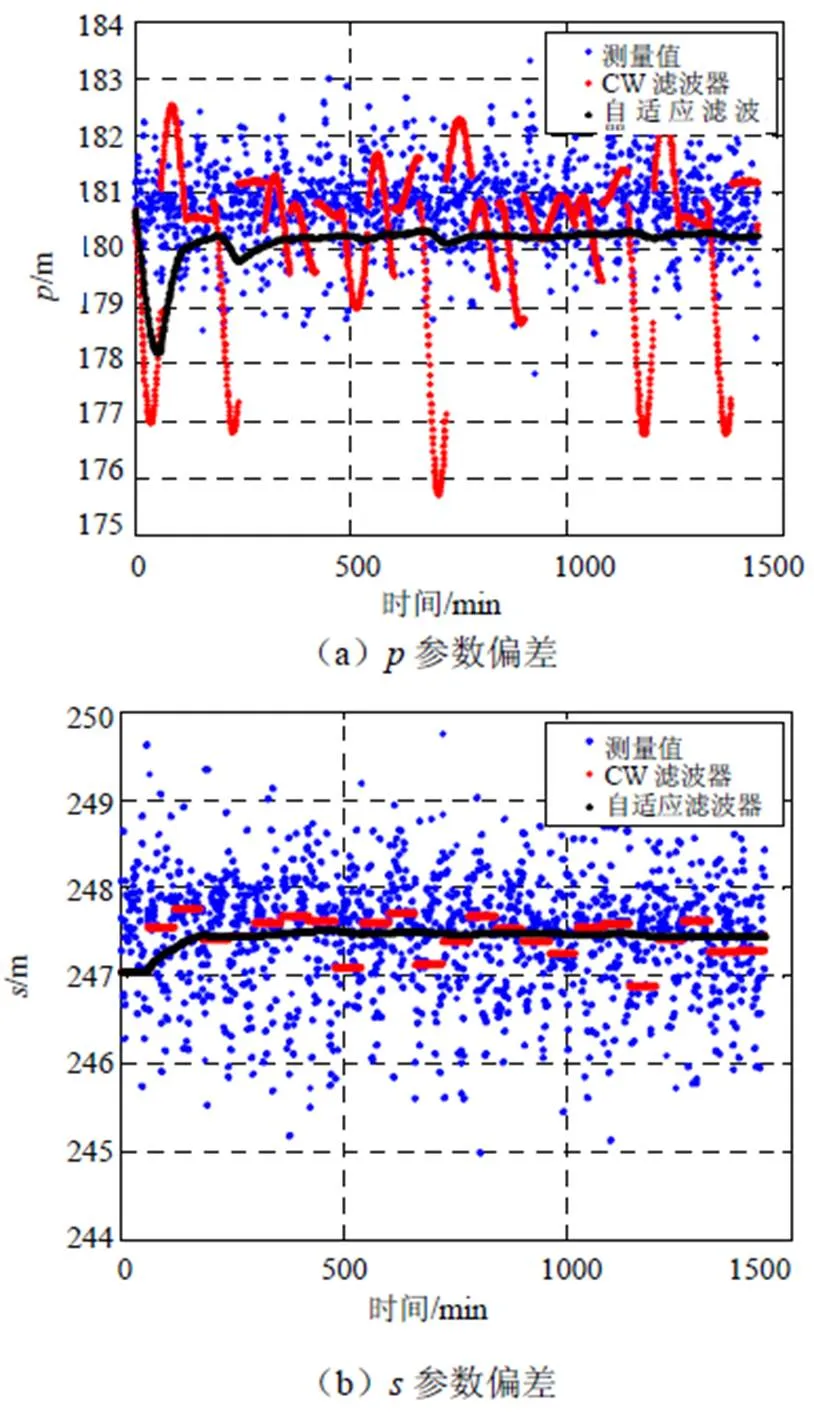
由两种仿真测试可知,基于相对轨道根数的自适应滤波器具有更好的精度和稳定性,特别是在数据中断的情况下,能保持很好的导航性能,具有工程应用价值。
5 结束语
本文采用带衰减因子的自适应相对轨道根数导航算法,适用于目前广泛应用的分布式编队卫星构型确认,相比于传统的基于位置速度的滤波方法,能有效降低相对位置速度与构型参数转换间的系统误差。同时,基于相对轨道根数的动力学模型也能更加稳定地进行构型预报,使得较长时间无观测数据的情况下,滤波不会发散。仿真结果验证了该算法的有效性,对近距离分布式编队飞行任务具有较好的应用价值。
[1] 林来兴. 分布式小卫星系统的技术发展与应用前景[J].航天器工程,2010,19(1):60-66.
[2] 曾国强,张育林. 编队飞行队形设计一般化方法[J]. 中国空间科学技术,2003(1):24-28.
[3] 邵凯,张厚喆,秦显平,等. 分布式InSAR编队卫星精密绝对和相对轨道确定[J]. 测绘学报,2021,50(5):580-588.
[4] 黄普,钱山,谢鑫,等. 基于强跟踪器的机动航天器相对动态定位算法[J]. 系统工程与电子技术,2015,37(5):1140-1145.
[5] 楚瑞. EKF/UKF在编队飞行卫星GPS相对导航中的应用[J]. 空间控制技术与应用,2008(5):57-60.
[6] 涂佳,谷德峰,吴翊,等. 基于星载双频GPS的长基线卫星编队高精度快速星间相对定位[J]. 系统工程与电子技术,2011,33(8):1850-1855.
[7] 杨维廉. 基于轨道摄动解的卫星编队飞行[J]. 宇航学报,2008(4):1166-1171.
[8] ALFRIEND K T, HANSPETER S, DONG-WOO G. Gravitational perturbation, nonlinearity and circular orbit assumption effects on formation [C]//AAS Guidance and Control Conference.Breckenridge USA, Feb 2000: 8-13.
[9] 刘付成,完备,杜耀珂,等. 近地轨道编队飞行卫星构形保持控制方法研究[J]. 上海航天,2014,31(4):6-10.
[10] Simone D’Amico. Autonomous formation flying in Low Earth Orbit [D]. Munich, Germany: Technische Universiteit Delft, 2010.
[11] Amico S D, Gill E, Montenbruck O. Relative orbit control design for the PRISMA formation flying mission [C]// Proceedings of the Conference of AIAA Guidance, Navigation and Control. Washingtong D. C.: AIAA, 2006.
[12] GILL E, MONTENBRUCK O, AMICO S D. Autonomous formation flying for the PRISMA mission[J]. Journal of Spacecraft and Rockets, 2006, 44(3):671-681.
[13] 杨盛庆,杜耀珂,贾艳胜,等. 基于约化相对轨道拟平根数的长期稳定高精度卫星编队导航技术[J]. 空间控制技术与应用,2017,43(1):30-35.
High-Precision Formation Navigation Technology of Distributed Satellites Based on Attenuation Factor
HUANG Pu, DU Kai, CAO Jing, ZHANG Chongyang
An adaptive formation navigation algorithm based on attenuation factor is proposed for long-term high-precision formation navigation of distributed satellites. Firstly, the relative motion equation of formation satellites is established based on e/i vector. Secondly, the conversion between inter-satellite relative position and the relative orbital elements is completed. Finally, the adaptive attenuation factor is introduced to increase the stability of the system and complete the high-precision relative navigation estimation. The simulation data shows that this method can overcome the linearization error of the model, has higher configuration determination accuracy than the traditional CW navigation algorithm, and can achieve long-term stable formation navigation.
Formation Navigation; Attenuation Factor; Relative Motion; Relative Orbital Elements
TN967
A
1674-7976-(2021)-06-399-06
2021-09-26。
黄普(1982.01—),陕西韩城人,硕士研究生,副研究员,主要研究方向为导航、制导与控制。
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
中国棉花(2022年2期)2022-11-23 20:02:04
数学小灵通(1-2年级)(2022年11期)2022-11-21 01:51:48
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
数学大王·低年级(2018年3期)2018-03-27 07:44:22
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
测绘科学与工程(2016年6期)2016-04-17 06:51:22
海军航空大学学报(2015年4期)2015-02-27 13:45:56
航天返回与遥感(2014年4期)2014-07-31 17:47:47