
弧焊机器人系统及焊接示教编程技术
2021-02-10 12:37高党寻周冰科姚启明徐江波
设备管理与维修 2021年23期
高党寻,周冰科,姚启明,徐江波
(清华大学基础工业训练中心,北京 100084)
0 引言
焊接作为工业制造中的“钢铁裁缝”,是工业生产中非常重要的加工手段,焊接质量的好坏对产品质量起着决定性的作用,同时由于焊接烟尘、弧光、金属飞溅的存在,焊接的工作环境又非常恶劣。随着先进制造技术的发展,实现焊接产品制造的自动化、柔性化与智能化已经成为必然趋势,采用机器人焊接已经成为焊接技术自动化的主要标志[1]。
机器人从20 世纪60 年代诞生至今经历了示教再现阶段、离线编程阶段和自主编程阶段。因技术尚未成熟,目前在国内外生产中应用的机器人系统多数处于示教再现编程阶段。工业机器人的示教主要有2 种方式:①在线示教。由技术人员引导,控制机器人运动,记录机器人作业的程序点并插入所需的机器人命令来完成程序的编写;②离线示教。操作者不对实际作业的机器人直接进行示教,而是在离线编程系统中进行编程或在模拟环境中进行仿真,生成示教程序,通过PC 机间接对机器人控制柜进行示教。以直接示教来探讨示教编程方法。
以清华大学基础工业训练中心材料成型实验室现有的KUKA-KR 5 arc 6 自由度弧焊机器人为研究对象,通过对直线轨迹、圆弧轨迹及其各自附加摆动功能示教编程方法的探讨,尝试实现板—板对接的机器人焊接试验,旨在培养学生的实践动手能力和机器人驾驭能力。拓宽学生对焊接技术在机械化自动化方面的了解以及对数字化制造的认知。
1 KUKA-KR 5 arc 弧焊机器人示教编程
1.1 弧焊机器人示教系统组成
弧焊机器人示教系统主要是由机器人主体、机器人控制柜、示教面板、数字焊机、焊枪、送丝机构、焊丝盘架、焊枪防撞系统、控制电缆组成的整体,此外,还包括外部装置电气控制、工作台、工装夹具、扩展设备,如外部轴(变位机、直线移动机构)等。弧焊机器人示教系统如图1 所示。

图1 弧焊机器人示教系统组成
除了以单台机器人为主构成的焊接系统外,还采用多机器人协作的方式组成焊接工作站或机器人焊接生产线[2],清华大学弧焊机器人实验室就采用双机器人与单轴变位机协同组成双机器人工作站如图2 所示。

图2 双机器人弧焊工作站
1.2 机器人示教系统及示教内容
KUKA-KR 5 arc 机器人的示教编程主要是在示教器(smart-PAD)上进行。KUKA-KR 5 arc 机器人示教器在同行业中最先采用Windows XPe V3.0.0 操作系统和可视性好的大屏幕彩色液晶显示器,使用移动键实现简单操作(图3)。机器人示教器各种功能键说明见表1。

表1 机器人示教器各种功能键说明

图3 SmartPAD
弧焊机器人运动轨迹的示教主要是确认点的属性,即采用PTP、LIN、CIRC 等方式示教各段运动轨迹的首末端点,而端点之间的连续运动轨迹控制(CP)由机器人控制柜产生。机器人示教编程内容包括:新建文件、选择坐标系、移动机器人、插入运动动作(PTP、LIN、CIRC 等)、添加焊接指令、收弧指令、选择示教速度、设置合理焊接参数(焊接电流、电压、焊接速度)和保护气体流量,最后要进行手动慢速运行(T1 模式)检查程序[3]。确保程序正确无误后,方可进行引弧施焊。
2 弧焊机器人典型轨迹示教
作为KUKA-KR 5 arc 机器人主要实现直线轨迹、圆弧轨迹、直线摆动轨迹和圆弧摆动轨迹4 种类型焊接功能。其他任何复杂的焊接轨迹都可拆分为这4 种基本形式。
2.1 线性(LIN)轨迹示教
对于线性运动,机器人坐标轴按照TCP 或工件参考点沿直线移动到终点的方法来控制。
如果机器人以规定的速度沿着一个精确的路径到一个点,则使用线性运动。完成直线运动焊缝的焊接仅需2 个属性点,即焊接起始点和焊接结束点,完成非直线运动焊缝时最需要插入焊接维持点。以图4 所示运动轨迹为例,阐述线性运动示教编程时需要注意的要点。

图4 直线轨迹
示教和编程直线P2→P3→P4→P5→P6,P3→P4→P5 线段设为焊接区间。焊接机器人起始位置(HONE)设为P1 点。
示教P1→P2 点:机器人HOME(P1)点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P2 点后确定参数,即设定机器人从P1 到P2 为“PTP”运动形式。
示教P2→P3 点:机器人P2 点,点击【菜单】“动作”,选择“LIN”;将机器人移动到P3 点后确定参数,即设定机器人从P2到P3 为“LIN”运动形式。
示教P3→P4→P5 点:机器人P3 点,点击【菜单】“指令”,选择“ARCON”,运动形式为“LIN”,即P3 点为焊接起始点,设置焊接速度1.00 m/min,并完成焊接电流、焊接电压的设置。将机器人移动到P4 点,点击【菜单】“指令”,选择“ARCSWICH”并确定参数,即P4 点为焊接维持点,将机器人移动到P5 点,点击【菜单】“指令”,选择“ARCOFF”并确定参数,即P5 点为焊接结束点。
示教P5→P6 点:机器人P5 点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P6 点后确定参数,即设定机器人从P5到P6 为“PTP”运动形式;示教程序如下:

注:程序内P 点数字为了与图中一致便于读者好理解,可能与实际编写时有差别。
2.2 CIRC 轨迹示教
示教、编程直线和圆弧组合P2→P3→P4→P5→P6,如图5所示。P3→P4→P5 圆弧段设为焊接区间。焊接机器人起始位置设为P1 点。

图5 圆弧轨迹
示教P1→P2 点:机器人HOME(P1)点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P2 点后确定参数,即设定机器人从P1 到P2 为“PTP”运动形式。
示教P2→P3 点:机器人P2 点,点击【菜单】“动作”,选择“LIN”;将机器人移动到P3 点后确定参数,即设定机器人从P2到P3 为“LIN”运动形式。
示教P3→P4→P5 点:机器人P3 点,点击【菜单】“指令”,选择“ARCON”,运行形式为“CIRC”即P3 点为焊接起始点,设置焊接速度1.00 m/min,并完成焊接电流、焊接电压的设置。将机器人移动到P4 点,点击【菜单】“辅助点坐标”,即P4 点为圆弧维持点,将机器人移动到P5 点,点击【菜单】“目标点坐标”,即P5点为圆弧目标点,并确定参数,然后点击【菜单】“指令”选择“ARCOFF”并确定参数,即P5 点也为焊接结束点。
示教P5→P6 点:机器人P5 点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P6 点后确定参数,即设定机器人从P5到P6 为“PTP”运动形式;示教程序如下:

注:程序内P 点数字为了与图中一致便于读者好理解,可能与实际编写时有差别。
2.3 摆动轨迹示教
为了能够有效控制焊接热输入及提高焊接效率,需要配合使用焊枪摆动功能。摆动方式有:Spiral(螺旋形)、Trapezoid(梯形)、Triangle(三角形)、UnsymetricTrapezoid(不对称梯形)等类型。摆动轨迹示教如图6 所示,“三角形”摆动模式如图7所示。

图6 摆动轨迹示教
直线摆动示教用“LIN+摆动模式”,圆弧摆动用“CIRC+摆动模式”,对图7 给出的运动轨迹进行示教来说明摆动功能示教的关键。以“三角形”摆动模式为例。
焊接机器人起始位置设为P1 点,图7 中,P2→P3→P4→P5四点构成直线摆动轨迹,其中P2 为焊接起始点,P3、P4左右距离为摆动长度,P3、P4上下距离的为摆动偏转。P5→P6→P7→P8→P9 五点构成圆弧摆动轨迹,P5 为圆弧焊接起始点也是焊接维持点,P6、P7 左右距离为摆动长度,P6、P7 上下距离的为摆动偏转,P8 为圆弧焊接辅助点,P9 为圆弧焊接目标点也是焊接结束点。P1、P10 为空走点。
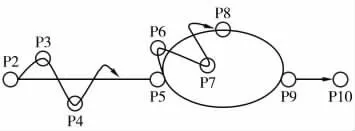
图7 “三角形”摆动模式
示教P1→P2 点:机器人HOME(P1)点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P2 点后确定参数,即设定机器人从P1 到P2 为“PTP”运动形式。
示教P2→P5 点:机器人P2 点,点击【菜单】“指令”,选择“ARCON”,运动形式为“LIN”,然后点击【WDAT2?】在摆动菜单选择“三角形”,输入合适的“长度”、“偏转”参数,设置焊接速度1.00 m/min,并完成焊接电流、焊接电压的设置,将机器人移动到P5 点后确定参数,即设定机器人从P2 到P5 为“LIN+三角形摆动”运动形式。
示教P5→P9 点:机器人P5 点,点击【菜单】“指令”,选择“ARCSWICH”,运行形式为“CIRC”,然后点击【WDAT3?】在摆动菜单选择“三角形”,输入合适的“长度”、“偏转”参数,即P5 点为焊接起始点,将机器人移动到P8 点,点击【菜单】“辅助点坐标”,即P8 点为圆弧辅助点,将机器人移动到P9 点,点击【菜单】“目标点坐标”,即P9 点为圆弧目标点,并确定参数,然后点击【菜单】“指令”选择“ARCOFF”并确定参数,即P9 点也为焊接结束点。
示教P9→P10 点:机器人P9 点,点击【菜单】“动作”,选择“PTP”;将机器人移动到P10 点后确定参数,即设定机器人从P9到P10 为“PTP”运动形式;示教程序如下:

注:程序内P 点数字为了与图中一致便于读者好理解,可能与实际编写时有差别。
3 结语
随着先进制造技术的发展,实现焊接产品制造的自动化、柔性化与智能化已经成为必然趋势,采用机器人焊接已经成为焊接技术自动化的主要标志。当今市场迫切需求能娴熟驾驭机器人的技术人才,以KUKA-KR 5 arc 6 自由度弧焊机器人为例,介绍和讨论弧焊机器人示教系统的组成,归纳总结焊接在线示教编程的内容与流程,分析直线、圆弧、直线摆动和圆弧摆动4种典型运动轨迹的弧焊机器人焊接示教编程要领,并对该程序各指令的功能逐一进行详细的分析和介绍。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
建材发展导向(2022年4期)2022-03-16
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
科学技术创新(2020年6期)2020-04-18
疯狂英语·新悦读(2020年1期)2020-02-20
建材发展导向(2019年11期)2019-08-24
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
美食堂(2017年1期)2017-01-13
鸭绿江(2013年10期)2013-03-11
