
基于世界机器人大赛轮式机器人登台方式的研究与实现
2021-02-10 11:40:18张永清刘航天柳源平
河北建筑工程学院学报 2021年3期
张永清 刘航天 董 帅 柳源平
(河北建筑工程学院,河北 张家口 075000)
0 引 言
随着人们对机器人产品兴趣的不断提高,世界机器人大赛也得到更多人的关注.其中标准组轮式机器人对抗赛是一种趣味性和竞技性都很强的比赛.比赛开始后机器人首先要自主登上擂台,之后比赛双方的机器人在擂台上自主寻敌进行搏击,倘若一方的机器人自己冲下擂台或者被对方攻击掉台,则机器人必须在规定的时间内进行自主登台方可继续比赛.因此机器人自主登台方式的设计至关重要,其直接决定着比赛能否顺利进行的关键所在.本文主要研究了标准轮式机器人如何准确识别擂台位置以及机器人的登台方式,并着重对各种登台方式的原理和特点进行具体的分析和说明.
1 机器人登台方式的设计
1.1 利用机械臂实现登台
利用机械臂结构来实现机器人的自主登台(如图1),其最大的特点是在机器人的前后都布置上相同结构的机械臂,当机器人在台下的时候,机械臂呈收起状态,机器人首先通过传感器确定擂台的位置,然后正对擂台将前部的机械臂搭放在擂台边缘,以机械臂为支撑把机器人抬起,电机驱动轮子前进致使机器人前半部分登上擂台,之后将前机械臂收起并放下后机械臂,同样通过机械臂的支撑作用将机器人的后轮抬起,电机驱动机器人向前运动直至机器人全部上台,所有机械臂全部收起机器人呈攻击状态.
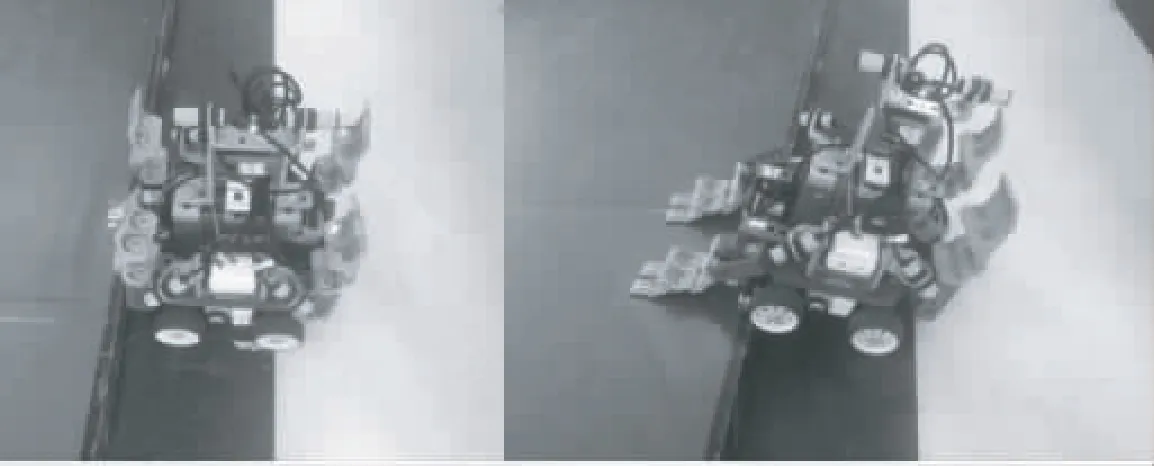
图1 利用机械臂登台
这种利用机械臂来实现登台的方式主要的优点就是登台过程稳定,机器人在整个登台的过程中不会出现猛烈的撞击和震动,对机器人内部的结构没有冲击,不会因为登台而造成内部结构的损坏.同时,该登台方式也存在一些不足,主要有以下几点:
(1)结构复杂,需要在机器人前后安装两套机械臂;
(2)机械臂不能代替推铲作为武器,降低了机器人的攻击性能;
(3)上台过程较为繁琐,耗时较长.
因此,若要采用机械臂来登台,则机械臂的机构要尽可能设计的简单灵活,机器人的底盘重心尽可能低,以增加机器人的整体稳定性.机器人的登台程序设计不能太过繁琐,否则机器人无法在比赛要求的时间内登台,直接导致扣分.
1.2 利用后斜坡机构实现登台
利用后斜坡机构进行登台(如图2),不需要设计许多机械臂,故其结构要相对简单许多.在机器人的前部设计攻击用的推铲,在机器人的后部设计登台用的后斜坡机构.机器人在刚启动或是掉下擂台之后,同样先由传感器识别擂台的位置,确定好擂台位置之后,机器人运动至背对擂台的状态,然后电机驱动车轮加速向后运动,通过后侧斜坡的导向作用使机器人冲上擂台,以达到机器人自主登台的目的.
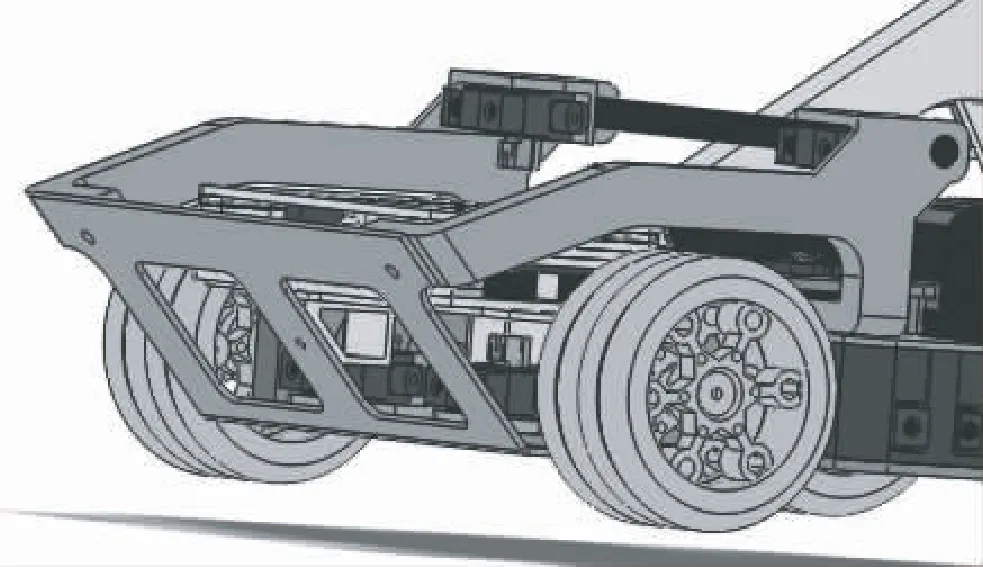
图2 利用后斜坡机构登台
显然,这种利用后斜坡登台的方式和利用机械臂登台相比要更简单更快捷一些.没有繁琐的结构和步骤,直接对准擂台边缘加速冲上擂台,耗时更短,实用性更强.但通过实际试验发现,这样结构同样具有缺点,主要如下:
(1)对后斜坡和地面之间角度的设计要求很高,角度太大或太小都直接影响实际登台的效果;
(2)登台时机器人的移动速度很快,在和擂台撞击瞬间对机器人整体结构造成很大冲击.
若要利用后斜坡来登台,则需要确保机器人整体结构十分稳定,尤其是内部电路要有足够的稳定性,否则因为登台而造成其他故障,结果将得不偿失.最后就是要对后斜坡与地面之间的角度设计进行仔细研究.根据比赛要求可知,比赛用擂台的高度为60 mm,通过设计一系列角度梯度值来进行实验,根据实际试验的登台效果可以得出当后斜坡与地面夹角在30~40°之间时,机器人登台的稳定性更好,登台过程更加迅速流畅.
在解决处理好上述问题之后,这种利用后斜坡登台的设计将极大提高机器人的实际比赛中的整体表现效果.机器人的结构将更加简洁,登台速度更快更稳,攻击力也将得到一定提高.
1.3 利用辅助支撑弧实现登台
在机器人前方两侧增加两个辅助支撑弧(如图3),当机器人在擂台下或在擂台上巡敌攻击时辅助支撑弧呈收起状态,只有当机器人处在擂台下需要进行登台时,由电机驱动辅助支撑弧做整周的圆周运动,与此同时机器人加速向前运动,整个机器人呈飞跃式状态,通过辅助支撑弧的作用使机器人实现登台的目的.

图3 利用支撑弧进行登台
这种利用辅助支撑弧实现登台的设计,虽然没有前面两种应用较多,但其结构简单可以给机器人的其他主要部位设计留出充足空间,而且登台迅速,耗时短也很好的符合比赛的要求.
通过观察图3的设计可以看出,采用辅助支撑弧进行登台其结构非常简单,不管是与机械臂还是与后斜坡机构相比,该设计都要更加灵活简单.其完成登台动作的过程同样非常迅速,能很好地在比赛规定时间内完成任务.除此之外,在保证稳定迅速地实现登台动作的同时,该结构由于十分简单,并且给底盘等其他结构的设计留出了很大空间.在车轮设计方面,采用两个大号车轮和地面接触面积更大,抓地效果更好,极大提高了机器人自身稳定性.降低了在比赛过程中被敌人推下擂台的风险.
2 机器人的自主识别与准确定位
对于机器人的自主登台来说选择什么样的登台方式十分重要,但同样还有一个十分关键的问题值得注意,那就是机器人的自主识别与准确定位.显然,机器人要想登台就必须对自身位置状况和擂台具体位置做出准确的判断.这就要求机器人本身能够准确识别比赛环境,快速确定自身位置并判断自己是在擂台上还是擂台下.
对于这一问题,可以通过安装多种传感器相配合来实现机器人的自主识别与准确定位.结合比赛要求和实际情况可选用红外测距传感器和灰度传感器来实现此功能.首先要确定机器人自身所处的位置.根据比赛规则介绍可知,比赛擂台的表面颜色是渐变的,最外侧是黑色渐变到中心为白色,根据这一情况我们可选用灰度传感器,因为不同的颜色对光的反射程度不同,其传输到传感器的数值也就不同.故当机器人处在擂台中心时检测的灰度平均值较小,而当机器人处在擂台边缘时检测的灰度平均值较大,以此来实现机器人对自身的准确定位.其次,分别在机器人的底盘和顶部安装四个红外测距传感器,通过各个传感器之间的配合工作,对机器人周围环境做出检测并判断出擂台的位置.由于擂台高度为60 mm,低于后方传感器的高度,因此当后方四个传感器同时接收到信号的时候,表明机器人此时正对擂台,从而确定擂台位置.
3 结 语
本文主要对世界机器人大赛中标准轮式机器人的登台方式做了详细介绍,重点分析了三种不同的机器人登台方案,对每一种方案的优缺点都做了具体说明.三种不同的登台方案基本可以满足机器人在不同位置的需要,实现顺利登台.除此之外,本文还对机器人如何准确识别自身以及擂台的位置做了简要分析.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
河北理科教学研究(2021年3期)2022-01-18 05:34:24
发明与创新(2021年39期)2021-11-05 07:15:28
高技术通讯(2021年3期)2021-06-09 06:57:48
当代陕西(2019年6期)2019-04-17 05:03:50
天津诗人(2017年2期)2017-11-29 01:24:12
自动化学报(2017年5期)2017-05-14 06:20:56
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
光学精密工程(2016年1期)2016-11-07 09:01:59
汽车文摘(2015年11期)2015-12-02 03:02:53
