
交叉路口转弯车辆对横穿行人的避撞策略*
2021-02-06 11:34葛如海肖轩洪亮崔义忠
汽车技术 2021年2期
葛如海 肖轩 洪亮 崔义忠
(江苏大学,镇江 212013)
主题词:交叉路口 横穿行人 避撞策略
1 前言
近年来,世界各国的交通事故频率有效降低,尤其是车与车之间的碰撞事故显著减少,美国公路安全保险协会(Insurance Institute for Highway Safety,IIHS)研究发现,当车辆配备前方碰撞预警(Forward Collision Warning,FCW)和自动紧急制动(Autonomous Emergency Braking,AEB)系统时,追尾事故能够减少50%[1]。另一方面,全球弱势道路使用者(行人、两轮车车和三轮车使用者)死亡人数占道路交通事故总死亡人数的54%[2],行人作为其中最弱势的群体,死亡占比达到23%,因此,针对行人以及其他道路弱势群体保护的避撞技术成为下一代汽车主动安全技术的研究热点[3]。
交叉路口转弯车辆与横穿行人碰撞是典型的人车碰撞场景。欧洲开展的PROSPECT(Proactive Safety for Pedestrians and Cyclists)项目对欧洲多国的交通事故数据进行了统计研究,发现该类型事故在所有人车碰撞事故中的占比接近16%[4]。车瑶栎等[5]从中国预碰撞场景数据库中筛选出了450起人车碰撞案例,对7类人车事故场景中的事故环境、事故路段、车辆状况、行人情况进行了统计分析,结果发现汽车左转与行人碰撞时车速较低,而右转与行人发生碰撞时车速较高,造成的行人简明损伤定级标准(Abbreviated Injury Scale,AIS)评分偏高。Yasuhiro Matsui提取出2005~2014年日本交通事故综合分析中心(Institute for Traffic Accident Research and Data Analysis,ITARDA)数据库中的人车碰撞事故,使用统计检验方法计算汽车低速行驶时不同碰撞场景中行人死亡的相对比例,发现交叉路口车辆右转碰撞场景中行人死亡比例明显较高[6]。因此,交叉路口低速转弯车辆避撞研究对减少行人伤亡数量具有积极意义。
胡延平等[7]研究了交叉路口工况下的车对车AEB控制,构建了该工况下的安全距离模型,但此工况中的自车与目标车均为直线行驶,未涉及交叉路口车辆转弯的情况。为了提高交叉路口车辆转弯时对行人的保护程度,本文首先建立转弯车辆与横穿行人的位置关系模型,然后提出行人运动参数获取方法,建立时间指标对危险行人目标进行判断,最后提出该场景下的制动安全距离模型,综合时间和距离指标进行避撞决策。
2 行人目标跟踪
2.1 转弯车辆-行人位置关系
假设车辆在转弯前已经完成减速操作,且在转弯过程中保持匀速行驶,采用近距离毫米波雷达获取行人运动信息,雷达坐标原点与车辆质心重合。转弯车辆与行人的位置关系如图1所示,其中P点为行人位置。

图1 转弯车辆与行人的位置关系
图1中,BM为汽车的转弯行驶轨迹,车辆两侧虚线围成区域为转弯行驶区域。转弯轨迹为以O为圆心、R为半径的圆弧,结合车辆基本参数和速度信号可得:

式中,K为汽车的稳定性系数;vego为车辆行驶速度;l为车辆轴距;δ为转向角。
目标与车辆构成的圆周角α为:

式中,a为车辆质心到车辆前端的距离;ρr和θ分别为雷达坐标系中目标的距离和角度。
目标与转弯车辆的横向距离y与PM的长度相等,根据余弦定理,有:

目标与转弯车辆的纵向距离x与角α对应的圆弧BM长度相等:

将目标速度进行旋转变换,得到目标相对于转弯车辆的纵向和横向速度vx和vy:

式中,vxr、vyr分别为雷达坐标系中目标的纵向、横向速度。
2.2 目标轨迹预测
汽车检测到行人目标后,需要对目标运动轨迹进行预测,以实现对目标的实时跟踪。本文假设行人目标的横、纵向速度在预测时间内保持恒定[8],建立预测方程:

式中,x(k+p)|k、vx(k+p)|k、y(k+p)|k、vy(k+p)|k分别为预测步长时间p内行人相对于转弯车辆的纵向距离、纵向速度、横向距离、横向速度;t为单步采样时间;k为当前采样时刻。
3 避撞策略设计
3.1 危险行人目标判断
根据目标的运动信息建立目标进入时间(Time to Enter,TTE),目标离开时间(Time to Disappear,TTD),避撞剩余时间(Time to Collision,TTC)3 个评价指标[9],用于判断探测到的周围物体是否存在危险目标。
目标进入时间指目标保持当前移动状态进入车辆转弯区域的时间。当目标处于车辆转弯区域内时,进入时间为0;当目标在车辆转弯区域之外且保持静止时,进入时间为无穷大。目标进入时间tTTE的计算公式为:
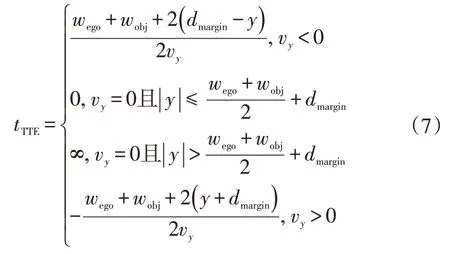
式中,wego为车辆的宽度;wobj为目标的宽度;dmargin为车辆与目标应保持的最小安全距离。
目标离开时间是指目标保持当前运动状态离开车辆转弯区域的时间。根据定义可知:当目标与车辆没有横向相对运动时,离开时间为无穷大;当目标朝向车辆预测区域运动时,离开时间为正值。目标离开时间tTTD的计算公式为:


式中,ax为目标相对于转弯车辆的纵向加速度,当目标为行人时,取ax=0。
根据2.2 节方法获取周围目标的运动信息,综合车辆状态信息,将所需参数带入式(7)~式(9)中,计算各目标对应的进入时间、离开时间、避撞剩余时间。通过比较3个参数得到目标危险信号(Object Threat,OT),目标危险信号kOT的取值为:

3.2 主动制动安全距离模型
采用基于安全距离的方法,对驾驶员预警及主动制动操作进行安全评估。在交叉路口汽车转弯场景中,行人与汽车的相对运动比较复杂,因此将其分解为纵向运动和横向运动,然后求解制动安全距离。
汽车面对纯纵向运动目标的安全距离Sbrx为[10]:

式中,ts为制动系统反应时间;amax为车辆最大减速度。
自车面对横向运动目标的制动过程如图2所示,主动制动的目的是延长汽车到预计碰撞点的时间,即四边形OABC与五边形OADEF面积相等,避让过程需保证目标安全通过汽车预测行驶区域,但车速不一定降为0。
图2 中,t0为车辆匀速行驶的时间,tb为车辆以最大减速度amax匀减速运动的时间,可得车辆的制动距离为:

其中,有:


图2 自车面对横向运动目标的制动过程
面向横向运动目标的制动安全距离Sbry为:
目前,诸暨市基本上实现了“调解进机关、调解进学校、调解进厂矿、调解进社区、调解进乡村、调解进市场”,“哪里有矛盾,哪里就有调解组织;哪里发生纠纷,哪里就有调解工作”以及 “专业矛盾专家调”。2017年,全市人民调解组织共受理矛盾纠纷16 823件,调处成功率达到97.7%。

式中,Δt=tTTD-tTTC。
式(14)中,当且仅当式(15)成立时,Sbry有意义:

通过式(11)和式(15)可得根据行人纵向运动和横向运动计算的安全距离Sbrx和Sbry。当面对横穿运动的行人目标时,主动制动安全距离Sbr取其中的较小值:

驾驶员预警的目的是提供危险警告使驾驶员采取操作,因此驾驶员预警距离Sw应大于主动制动距离:

式中,tr为驾驶员反应时间。
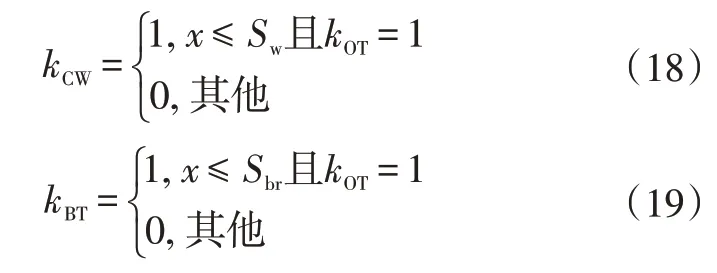
建立与预警及制动安全评估有关的信号,碰撞预警信号(Collision Warning,CW)kCW和主动制动信号(Brake Threat,BT)kBT:
3.3 避撞决策逻辑
建立避撞决策逻辑如图3 所示。为兼顾安全性与驾驶舒适性,系统优先对驾驶员进行干预,首先通过声、光、振动等方式对驾驶员进行预警,当驾驶员未采取操作时且主动制动信号触发时,采取主动制动操作。
4 避撞策略仿真验证
参考文献[11]的事故研究结果,提取4个典型场景,基于PreScan软件完成转弯车辆与行人碰撞仿真场景建模,如图4所示,4种典型场景的具体仿真参数如表1所示。
选取Audi A8车型作为仿真车辆,采用独立传感器(Technology Independent Sensor,TIS)获取行人信息,仿真及避撞策略中的参数如表2所示。
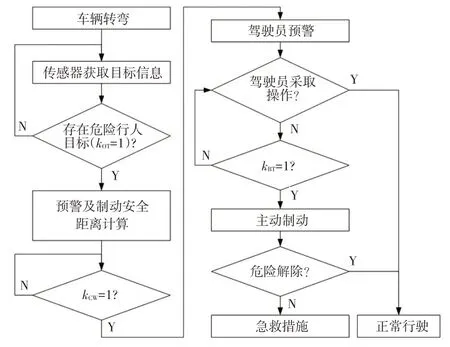
图3 避撞决策逻辑

图4 转弯车辆与行人碰撞仿真场景

表1 4种典型场景仿真具体参数

表2 仿真及避撞策略中的参数
在MATLAB 中建立第2 节中的避撞策略,分别对4种典型场景进行仿真。
避撞策略在场景1 中的仿真结果如图5 所示,在t=6 s 时车辆检测到行人,在t=9.52 s 时,满足目标危险信号触发条件,kOT置1,t=10.51 s 时,满足主动制动触发条件,车辆在转弯时速度出现小幅降低,制动信号触发后,汽车在0.5 s 内制动停车,避免了与行人碰撞。t=10.52 s 之后参数存在突变现象,原因是软件中TIS 与目标距离较近时未检测到有效信号。
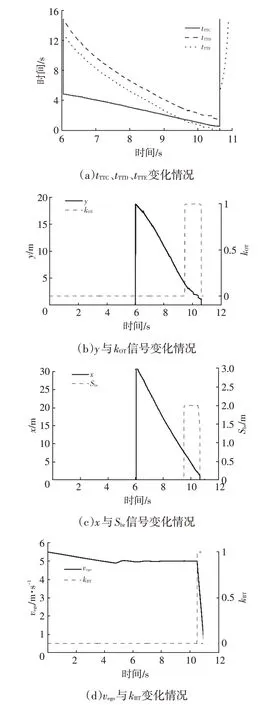
图5 避撞策略在场景1中的仿真结果
场景2、3、4 的x和Sbr信号变化情况如图6~图8 所示。与直行路段相比,汽车进入转弯路段时与行人的相对距离发生了较大变化,采用转弯车辆-行人位置关系模型计算相对距离更加符合实际情况。
按照制定的避撞决策逻辑,行人已安全通过汽车行驶区域时,主动制动解除,场景1和场景4中主动制动解除时车速降为0,场景2 和场景3 中停止制动时车速分别降为12 km/h 和5 km/h,且都避免了碰撞。仿真结果表明,本文策略在4种典型场景中均能达到避撞效果。
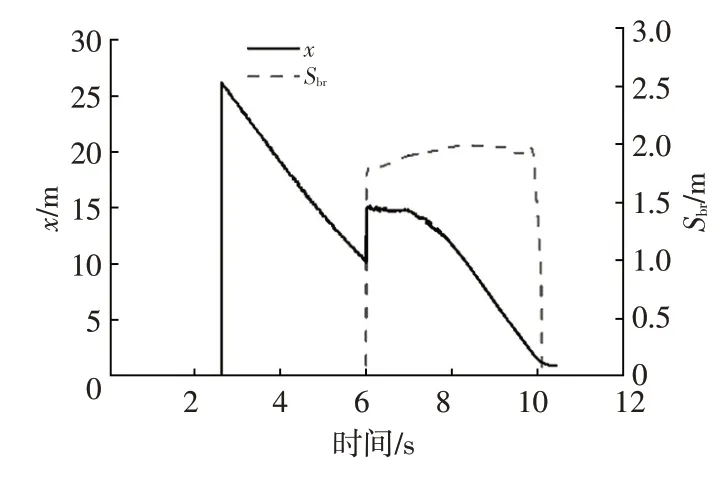
图6 场景2中x与Sbr信号
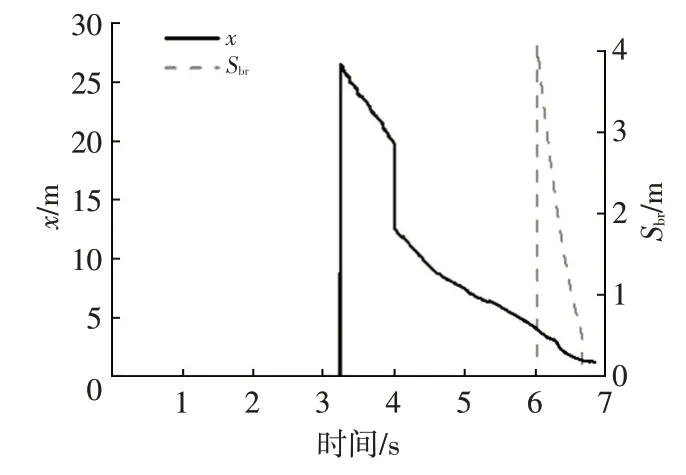
图7 场景3中x与Sbr信号

图8 场景4中x与Sbr信号
5 结束语
本文提出了一种交叉口转弯汽车与横穿行人的避撞策略,通过建立转弯车辆与行人位置关系模型,研究了汽车转弯时行人运动信息的获取方法,提出了基于时间的危险行人目标判断方法,建立了目标进入时间、目标离开时间、避撞剩余时间3个参考指标。将行人相对于车辆的运动分解为纵向运动与横向运动,求得此场景下的制动安全距离,确定了汽车转弯时的避撞策略。利用PreScan软件对4种典型交叉路口转弯车辆与横穿行人冲突场景进行建模,并联合MATLAB 对避撞策略进行了仿真验证,仿真结果表明,本文提出的避撞策略能够有效应对此种人车冲突场景。
猜你喜欢
意林(2021年5期)2021-04-18
价值工程(2019年18期)2019-07-25
扬子江(2019年1期)2019-03-08
思维与智慧·上半月(2018年11期)2018-11-30
世界家苑(2018年6期)2018-07-23
中国房地产业·上旬(2018年3期)2018-05-14
建筑建材装饰(2016年22期)2017-08-14
小天使·一年级语数英综合(2017年6期)2017-06-07
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
