
无人驾驶车辆稳态漂移的无模型自适应控制
2021-02-04 05:26王洪斌左佳铄刘世达
控制理论与应用 2021年1期
王洪斌,左佳铄,刘世达,郑 维,王 力
(1.燕山大学电气工程学院,河北秦皇岛 066000;2.北方工业大学电气与控制工程学院,北京 100144)
1 引言
近年来,互联网技术和无线网络控制技术的快速发展给汽车行业带来了巨大改变.因此,针对汽车进行智能化控制是目前的研究热点,且在自动化控制领域得到了广泛应用.汽车智能化控制的目标是在简化汽车驾驶操作的同时提高汽车行驶过程中安全性.其中,无人驾驶智能化控制是将车载智能控制系统和多传感器进行融合,进而实现车辆自主安全驾驶的新型智能化技术[1].总体来说,无人驾驶过程是多技术融合的控制过程,主要包括计算机视觉、传感器融合、定位、路径规划和轨迹控制5部分.然而,无人驾驶汽车的行驶路线不是一成不变的,行驶过程中会遇到各种各样的复杂情况.综合国内外研究现状来看,无人驾驶车辆要求适应所有环境并在道路条件允许的操控极限下安全运行.此外,在一些特殊场合,无人驾驶汽车需要进行高速行驶,同时在遇到弯道时不能减速,因此要实现高速过弯行驶.为保证高速过弯行驶的安全性,对于非无人驾驶,驾驶员会使用“漂移”技术来完成高速过弯.漂移[2]是一种具有大侧滑角[3]与后轮胎饱和的转弯技术.由于漂移技术对驾驶员的驾驶能力要求非常高,如果操作不当,会发生严重事故.因此,在相同情形下实现无人驾驶车辆漂移控制是非常有意义的.在完成车辆漂移过程的同时,还需要实现无人驾驶安全性和鲁棒性.
针对上述研究,国内外学者已经做了很多工作.其中,文献[4]通过建立四轮后轮驱动车辆模型的横向动力学和驱动/侧偏轮胎联合摩擦模型,推导出了大侧滑角稳态转弯条件.文献[5]建立了四轮后轮驱动模型,在考虑车辆纵向和横向动力学、载荷传递效应和联合运动轮胎摩擦的基础上,验证该方法实现稳态漂移的稳定性.文献[6-7]研究低阶车辆模型下的漂移平衡问题,并进行控制器设计,用以实现汽车的安全漂移过程.另外,文献[8]设计滑模控制器,并使用独立前后轮驱动/制动力矩输入,给出了转向角固定在其稳态值,以实现单轨车辆的漂移平衡.文献[9]利用纵向/横向轮胎摩擦组合模型,引入纵向重量传递效应,推导出单线车辆的稳态转弯条件.文献[10]利用单轨模型横向动力学设计转向控制器来实现漂移平衡,进而基于纵向车辆动力学设计速度控制器,用来将车辆速度调节到期望稳态值.文献[11]通过调节车速、横摆率和侧滑角,使前轮驱动(front-wheel drive,FWD)在漂移状态下保持稳定.文献[12]设计一种开环和闭环混合控制策略,实现了瞬时漂移和转弯轨迹跟踪,并进行仿真和实验验证.文献[13]利用单轨车辆模型,解决后轮驱动(rear-wheel drive,RWD)车辆在平面上恒速、侧滑和曲率半径下实现单稳态的转弯问题,并利用BNP魔术公式和MNC模型对轮胎摩擦力进行估算.
从文献[4-13],可以看出以上针对漂移控制的研究均是在被控车辆模型已知的基础上进行的.由于对无人驾驶车辆的进行动力学建模和动态漂移过程进行动力学建模都是非常复杂的,且模型变量众多,变量之间存在复杂的耦合特性,因此,难以完成精确建模,也就无法实现精确控制.针对上述问题,为解决车辆漂移动力学建模不准确等因素而导致的诸多问题,引入数据驱动的控制方式.数据驱动指控制器设计不使用被控系统的数学模型信息,仅利用被控系统的在线离线I/O数据和经过数据处理得到的信息设计控制器,并在满足一定的假设条件下,证明系统的收敛性、保障系统稳定性和鲁棒性的控制方法[14].20世纪90年代以来,学术界涌现出多种基于数据驱动控制方法,如下:同步摄动随机逼近方法[15]、无模型自适应控制方法[16]、去伪控制方法[17]、迭代反馈整定方法[18]、虚拟参考反馈整定方法[19]和迭代学习控制方法[20]等.随着相应理论的不断发展与完善,上述方法被广泛应用到各个领域.
无模型自适应控制属于数据驱动控制的一种,无模型自适应控制(model-free adaptive control,MFAC)致力于实现一类离散时间非线性被控对象的控制问题[21].从理论研究的角度看,MFAC仅使用受控系统的输入输出数据,直接设计控制器并进行理论分析,并且数据中包含系统全部信息.因为属于无模型控制,所以无需考虑传统的建模过程、未建模动力学和鲁棒性等概念.无模型自适应控制突破了现代控制理论基于模型进行控制器设计的理念,避开了基于动态建模的现代控制理论面临的难题.从实际应用的角度看,使用数据驱动控制的方法研究无人车的漂移控制问题,可以解决无人车控制中的难以精确建模的难点,为无人车研究领域提供了新的研究方向.截止目前,无模型自适应控制方法在理论上已经发展成熟,针对单入单出系统、多入多出系统,都有相应的MFAC控制器的设计方法,并在基于压缩映射原理,在理论上证明了闭环系统的稳定性[16,22].此外,在原有MFAC基础上,MFAC在理论方面针对不同的控制对象与应用条件,还发展出了无模型自适应预测控制、无模型自适应迭代学习控制等方法[14].同时,MFAC方法在部分理论方面,还有待更进一步的发展和研究,包括MFAC鲁棒性完善、对数据库的灵活性应用、对稳定性证明机制的简化研究等.
基于数据驱动的控制方式,本文引入了基于无模型自适应控制的无人驾驶车辆的漂移控制方案,首先通过分析车辆漂移的动态动力学过程,以车辆转向角和后轮胎转速作为控制系统输入,作为实际车辆转向和油门的等效,同时以车辆速度、侧滑角和偏航率作为系统输出控制指标,来衡量无人车运动过程中的实际状态.然后利用动态线性化技术将输入输出系统转化为等价的紧格式数据模型,从而进行无模型自适应控制算法设计,进而设计伪雅可比矩阵估计与重置算法.本文引入的控制方法仅使用无人驾驶车辆运行过程的输入输出数据,不涉及车辆漂移的机体模型信息,对于复杂环境中不同车辆的动态漂移过程具有很强的实际应用价值.
2 车辆漂移动力学分析
漂移是一种转弯技术,漂移过程中,车辆在较大的侧滑角β下稳定在操作极限之外,且车辆转向与转弯方向相反.因此车辆存在一定程度上的横向行驶.侧滑角β表示车辆纵向方向和车辆速度方向之间的角度.轮胎与路面之间的接触面是用来车辆实现加速、减速和转弯的,轮胎在接触面上偏转产生的力在很大程度上决定车辆的运动方向,且力受到轮胎和路面之间摩擦力的限制.当轮胎饱和时且车辆在操作极限下工作时,轮胎和路面产生最大的摩擦力,当车辆转弯时后轮在前轮之前饱和,车辆进行漂移.漂移通常有3个特征:大的侧滑角、反向转向和对后轮施加大的纵向力.其中,大的侧滑角反映车辆指向方向和重心移动方向之间存在大的不匹配;反向转向和对后轮施加大的纵向力用来实现和保持漂移所固有的后轮饱和.分析表明,在漂移平衡时,需对后轮施加较大的纵向力以使后轮摩擦力达到饱和,同时施加纵向力增加车辆的稳态侧滑角,因此纵向控制是实现后轮驱动车辆的核心.需要指出的是,漂移的正确实现需要协调转向和油门输入,即协调控制车辆的转向和纵向输入.
四轮车辆结构图如图1所示.本文使用四轮车辆结构图代替包含非平面和多体动力学的复杂车辆模型来分析车辆漂移的动力学过程.如图1所示,fijk(i=x,y,j=L,R,k=F,R)表示每个轮胎处纵向和横向轮胎力;β表示车辆的侧滑角;V是质心处的车辆速度,δ表示前轮转向角;φ表示车辆的偏航角;lR,lF,wL和wR用于确定每个车轮相对于车辆重量中心C.M.的位置,ajk(j=L,R,k=F,R)为4个轮胎处的非零滑移角,Vjk(j=L,R,k=F,R)为4个轮胎处的速度矢量.
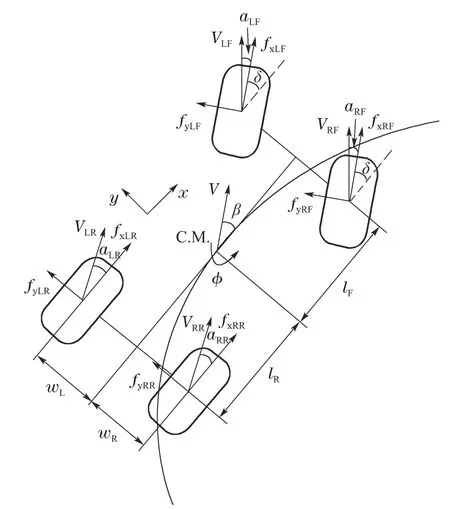
图1 四轮车辆动力学结构Fig.1 Four-wheel vehicle dynamic structure
与典型的转弯相比,带有后轮饱和的漂移转弯属于带较少约束形式的车辆运动.带后轮饱和的漂移转弯有效的将车辆的前进方向与C.M.移动的方向进行分离,而这两个量在转弯过程中是紧密耦合的.从图1中的车身坐标系可以看出,车辆在(x,y)平面上的运动参数由C.M.处的速度矢量V,V与x轴之间的侧滑角β和车辆绕x轴的角速度(偏航率)同时,轮胎与路面的接触面位置的速度矢量对分析车辆漂移运动也很重要,在车辆动力学分析中起着核心作用.轮胎与路面接触面的胎面因偏转产生侧向力,该偏转由轮胎处的非零滑移角引起,与车辆侧滑角相同,轮胎滑移角描述了轮胎指向方向与接触面速度矢量方向之间的不匹配性.前轮滑移角可以通过转向来调整,后轮滑移角随着车辆的运动而变化.轮胎与路面之间的摩擦力随着滑移角的增大而增大,直到达到临界滑移角,轮胎饱和.因此后轮饱和与滑移角在车辆运动过程中的变化有关,即轮胎摩擦力与轮胎滑移率有如下关系:

其中:sijk表示各轮胎在纵向和横向上的滑移率,f(·)表示相关函数关系.根据轮胎纵向和横向上的滑移率可以得出各轮胎总滑移率

根据车辆轮胎滑移率计算式有

其中:i=x,y,j=L,R,k=F,R,Vijk为个轮胎在纵向和横向上的速度矢量,wijk为各轮胎的转速,rjk为各轮胎的半径尺寸.
由式(1)-(3)可得轮胎摩擦力的变化可以通过调节轮胎转速来控制,即通过控制轮胎转速来控制车辆的纵向力输入.
在车辆处于恒定转向和恒速输入的稳态漂移状态时,稳态转弯工况可以表示为恒速、恒侧滑角和恒偏航率,可以表示为如下:

由于车辆的运动方式为后轮驱动和前轮转向,在前轮没有驱动的情况下,前轮可以认定为自由滚动,因此满足以下条件

利用不同的期望后轮转速和前轮转向角,可以计算出稳态条件下所需的控制参数:通过对漂移动力学进行分析,可以确定稳态漂移的控制状态量和控制输入量δ,wLR,wRR.状态量和输入量将被用在下节的控制器设计中,完成对漂移过程的稳态控制.同时,无人驾驶车辆稳态漂移的动态过程可以用一般的多输入多输出非线性离散时间动态系统来描述:
其中:u(k)和y(k)分别表示控制输入和系统输出;f(·)是未知的非线性函数,k表示采样时刻;u1(k),u2(k)和u3(k)分别表示前轮转向角、左后轮转速和右后轮转速;y1(k),y2(k)和y3(k)分别表示车辆速度、侧滑角和偏航率.
3 稳态漂移的无模型自适应控制设计
本节的设计目标是控制无人驾驶车辆实现稳态漂移,以车辆转向和后轮转速为控制输入,使车辆保持在稳定漂移的状态,即使车辆的速度V、侧滑角β和偏航率稳定在稳态值Vss,βss和附近.其中,MFAC控制无人驾驶车辆结构图如图2所示.
3.1 多输入多输出的稳态漂移过程的动态线性化过程
首先,给出被控对象的等效动态线性化数据模型,上述数据模型用于控制器设计.根据式(6),考虑多输入多输出的非线性离散时间系统:

其中:u(k)∈R3是控制输入,y(k)∈R3是控制输出,f(k)∈R3是未知的非线性向量值函数.针对本文研究内容,存在假设如下:
假设1控制函数f(·)关于控制输入u(k)的偏导数是连续的.
假设2该系统满足Lipschitz 条件,即对任意的k和‖∆u(k)0,存在‖∆y(k+1)‖≤b‖∆u(k)‖,其中:
且b是一个正常数.
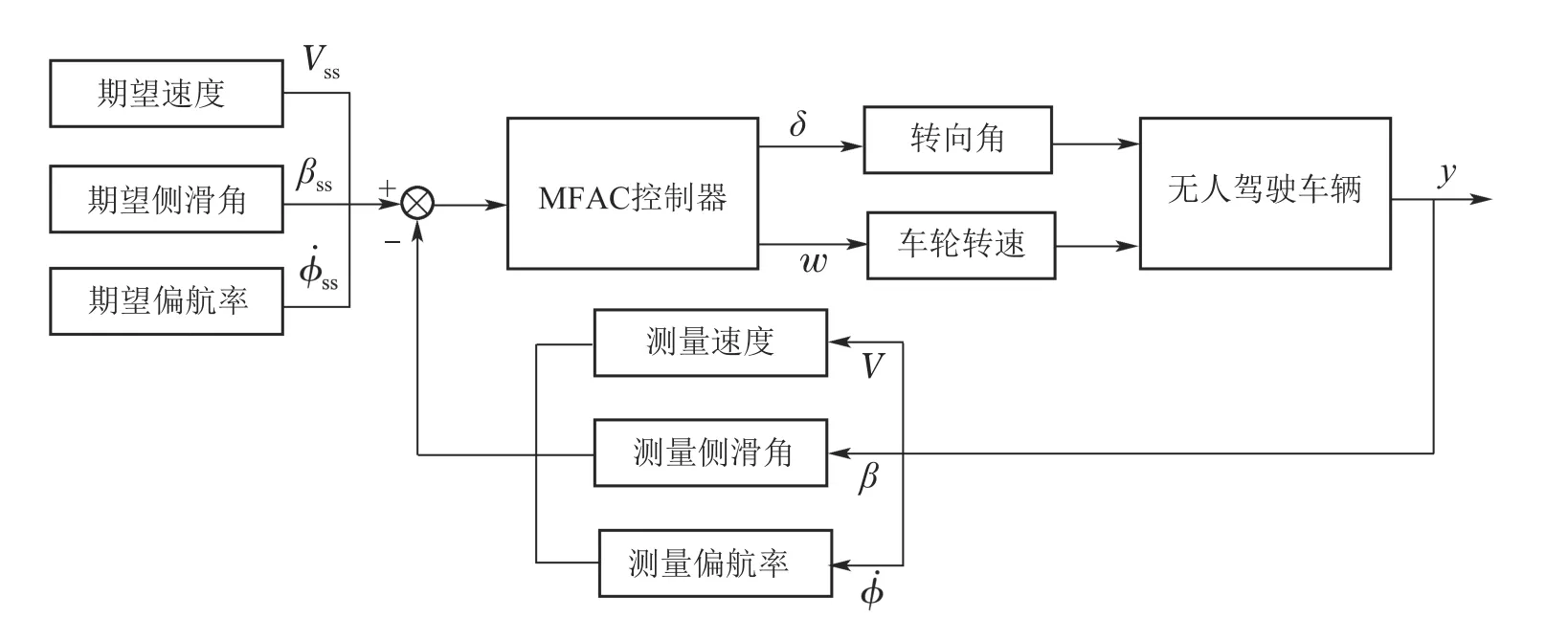
图2 无人驾驶车辆控制系统框图Fig.2 Control system block diagram of unmanned vehicle
注1假设1是一般非线性系统设计的典型条件.假设2对由控制输入的变化驱动的系统输出的变化率施加了上限限制.从“能量”的观点来看,如果控制输入的能量变化在有限的高度,系统内部的能量变化率不可能是无穷大的.即从实际角度看,针对无人驾驶车辆系统的假设1-2是成立的.
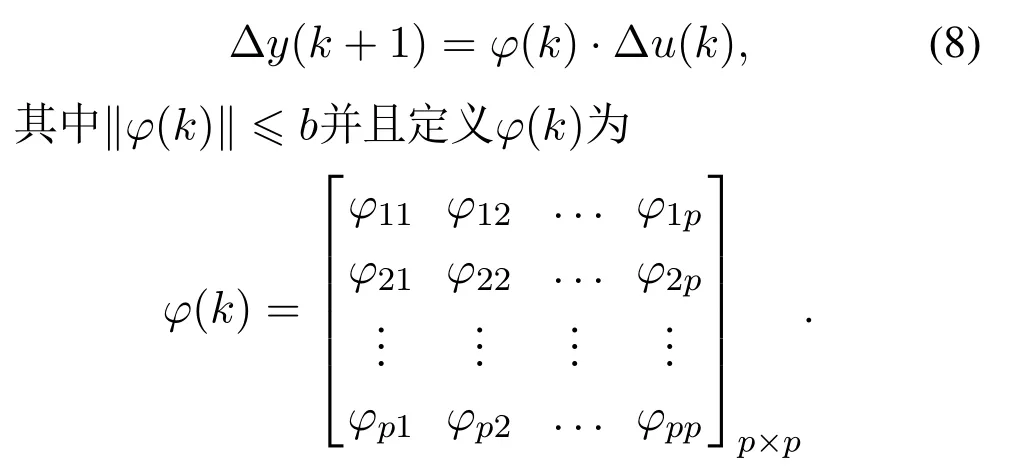
引理1对于满足假设1-2的系统(7),对任意有,必然存在一个伪雅可比矩阵,使得系统(1)可转化为以下的紧格式动态线性化数据模型:
证明见参考文献[16].
注2根据引理1,对每一个固定k,都存在时变的伪雅可比矩阵φ(k),使得非线性系统可以转化为紧格式动态线性化数据模型.从引理1证明过程可以看出,伪雅可比矩阵是存在的且具有严格的数学分析过程,是一种相对准确的、等价的线性化描述.伪雅可比矩阵φ(k)表示了输入量u1(k),u2(k),u3(k)与输出量y1(k),y2(k),y3(k)之间的耦合关系,φij的数值表示了输入输出参数之间耦合关系的紧密性,其中i=1,2,···,p(j=1,2,···,p).因此,伪雅可比矩阵可以满足上述参数之间的限制约束关系.
注3非线性系统的动态线性化,在系统运行当前工作点,与原有非线性系统等价,通过引理1的证明过程可得出相应结论.然而,在实际的控制器设计过程和应用过程中,能够保证动态线性化模型等价的真实伪雅可比矩阵值无法直接求出,而是通过参数估计算法获得的其估计值,因此在使用估计值的情况下,动态线性化模型与原非线性系统之间则并非完全等价,具体参见文献[14].
3.2 控制算法设计
本节根据上一部分提出的紧格式动态线性化数据模型,进行无模型自适应控制方案的设计.紧格式动态线性化数据模型是具有时变伪雅可比矩阵参数向量的线性模型.如果伪雅可比矩阵参数矢量可用,则动态线性化模型可作为被控对象的真实模型,从而可以将所有基于模型的理论结合到控制器设计中.
为了避免过大的控制输入引起的控制系统不稳定以及产生的误差,可以在控制算法中加入可变参数,用来保证控制输入具有较小的变化率,因此引入如下控制输入准则函数:

其中:λ>0是一个可变系数,作为权重因子,用于限制输入量过大的变化;y∗(k+1)是期望输出信号.
将式(8)代入到指标函数(9)中得

对u(k)求导,并令其等于零可得

由于上式控制算法中存在求逆运算,当系统输入输出维数较大时,求逆运算计算量大且耗时长,不利于实际应用.因此类比单输入单输出系统的MFAC控制器的设计过程[22],将其推导思想应用到多输入多输出的情况,设计控制律如下:
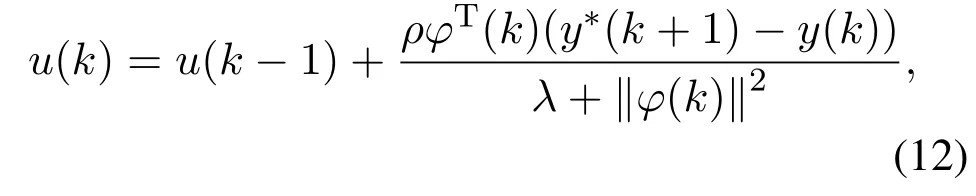
其中ρ ∈(0,1]是一个可变系数表示步长因子,加入步长因子可使控制算法更具一般性.
3.3 伪雅可比矩阵估计
由式(10)可知,设计控制律的关键是得到伪雅可比矩阵的值,但是由于系统模型未知,且伪雅可比矩阵是时变的,精确获得伪雅可比矩阵比较困难,因此采用多输入多输出的紧格式动态线性化数据模型,用以下参数估计准则函数对伪雅可比矩阵进行估计:

其中µ>0是一个可变系数表示权重因子,用于限制伪雅可比矩阵值变化率过大.
引理2(矩阵求逆引理[23].)A,B,C,D是适当的维度的矩阵,如果A,C和DA−1B+C−1的逆存在,那么

根据最优条件,对式(13)求极值,利用矩阵求逆引理对式(14)进行极小化处理,可以得到改进的投影估计算法如下:
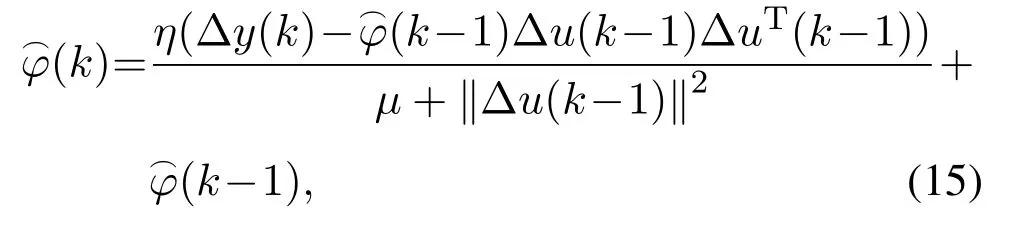
其中η ∈(0,2]是一个可变系数表示步长因子,加入的目的是使该算法具有更强的灵活性和一般性,且
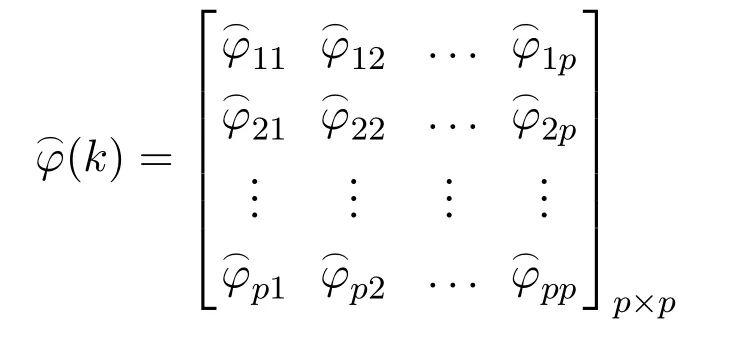
是伪雅可比矩阵的估计值.同时,为了使伪雅可比矩阵估计算法具有更好的对时变参数的跟踪能力,设计以下算法对伪雅可比矩阵进行重置.
注4为防止伪雅可比矩阵可能出现对时变参数、时变结构甚至时变相位的不敏感性,设置上述重置算法.在车辆漂移控制过程中,如果出现车辆硬件传感器传输错误,控制输入量的变化过小而导致控制失效,或者由于漂移过程激烈而导致控制方向发生变化的情况,本文提出的重置算法可以快速对被控系统纠正,将参数重置到初始值,继续更新,完成漂移控制过程.
3.4 控制方案
综合上述的动态线性化过程、控制算法设计和伪雅可比矩阵估计算法,可以得出针对多输入多输出系统的无模型自适应控制方案如下:

注5由式(16)-(17)可知,其自适应性首先主要体现在伪雅可比矩阵针对系统输入输出数据的实时更新,其次是在控制参数实时更新的基础上实现控制律的在线更新,这样可以有效保持整个无人车辆漂移控制系统的稳定性和准确性,进而提高控制系统对周围环境变化的适应性.
注6结合无人驾驶车辆的动态漂移过程,由文中动力学分析可知,无人驾驶车辆是一个非常复杂的控制系统,参数变量众多且参数之间耦合性较强,目前关于车辆漂移的研究是一个相对新颖的方向,现有的关于车辆漂移的控制均是基于模型的复杂控制.由于建模过程中存在许多忽略性假设,因此与实际控制系统相差较多,控制方案不能完全应用于实际系统.本文采取基于数据驱动的MFAC控制算法,由于MFAC算法控制过程不用模型信息,只需系统输入输出数据的优越性,可以为车辆漂移控制问题提供创新的控制方向和解决思路,同时在应用上大大增加了可操作性.
本节完成了MFAC 控制器的设计,将在下节对比PID 算法对控制器进行仿真实验验证.结合控制器设计过程,并与数据驱动PID算法相比较可知,MFAC算法具有较大的优越性.首先,在自适应性上,MFAC 控制器中伪雅可比矩阵根据系统输入输出数据实时更新,进而实现控制律的在线更新;而PID算法并无实时自适应更新,只能以确定的控制参数进行系统控制,自适应性不足.其次,PID算法的控制参数由实验及Z-N整定法进行测定,无稳定性证明;而MFAC算法的控制器设计存在完整的稳定性分析基础,可以较为严谨的证明控制器的正确性和有效性.
4 仿真分析
本小节使用MATLAB软件仿真平台对无人车辆控制系统进行仿真实验,并设计3个仿真方案来验证控制算法.第1个仿真方案为使用PID控制方法与本文设计的无模型自适应控制方法进行对比仿真,证明无模型自适应控制的有效性和优越性.第2个仿真方案为验证无模型自适应控制中控制参数对控制效果的影响,通过在线调整权重因子,证明权重因子对控制系统的影响.第3个仿真方案为对系统施加外部突发扰动,验证无模型自适应控制对扰动的抑制能力.
参考文献[2]中的建模分析过程,可以得到以下关于无人驾驶车辆漂移状态的输入输出关系,其可以表示为多输入多输出的非线性关系
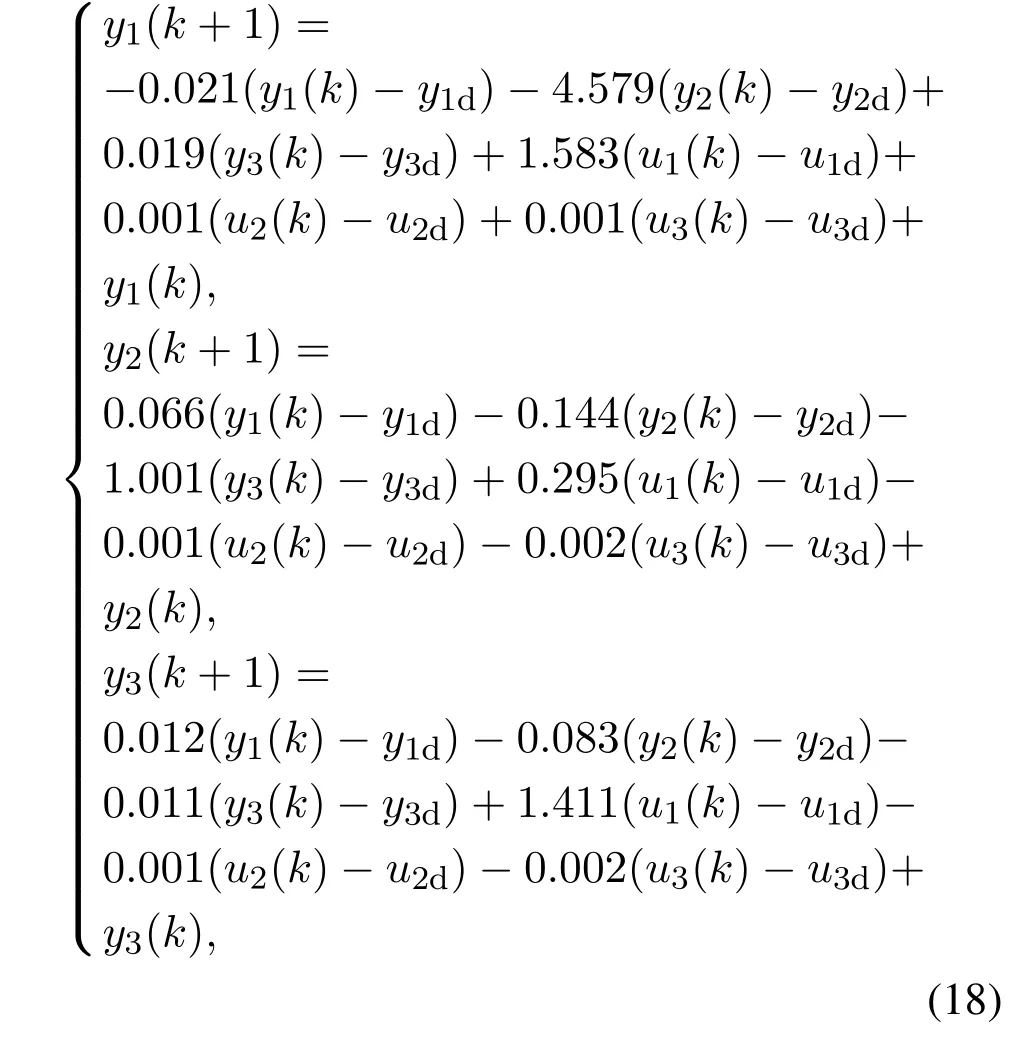
其中yid(i=1,2,3)和uid(i=1,2,3)分别为期望输入输出状态.其中:仿真控制输入参数均是前轮转向角、左后轮转速和右后轮转速,控制输出参数为车辆速度、侧滑角和偏航率;车辆初始状态设置为车辆速度V=6 m/s,侧滑角β=30◦和偏航率=−35(◦)/s.
注7上述描述无人驾驶车辆漂移的多输入多输出关系式,只用于等效获取车辆运行过程中输入输出数据,并不参与控制器设计过程.
4.1 PID控制和MFAC控制仿真对比
仿真中针对PID控制算法,由于系统为多输入多输出系统,故设置3个PID控制器,其PID控制参数采用Z-N整定法进行计算测定,经过大量验证选定控制系数如下表1所示.对于无模型自适应控制算法,式(16)-(17)中的控制系数设定为η=µ=ρ=1,λ=1.5,ε=10−5,伪雅可比矩阵初始值给定为
针对无人车辆系统,分别使用PID算法和无模型自适应控制算法对系统进行在线仿真,仿真曲线分别如图3-4所示.

表1 PID控制器系数Table 1 PID controller coefficient

图3 基于MFAC和PID算法的性能比较Fig.3 Performance comparison between MFAC and PID algorithm
图3(a)表示无人驾驶车辆系统的控制输出车辆速度响应;图3(b)表示无人驾驶车辆系统的侧滑角响应;图3(c)表示无人驾驶车辆系统的偏航率响应.两种控制方式在相同情况下开始运行,由图像曲线和数据可知,在PID控制器的作用下,速度稳定在期望值附近,且波动误差最大约为1.50%;侧滑角在初期时间内稳定在期望值,之后波动误差变大,最大波动误差大约为1.15%;偏航率的最大波动误差为2.37%.由图像曲线和数据可知,在MFAC控制器的作用下,速度、侧滑角和偏航率均稳定在期望值附近,最大波动误差分别为1.33%,0.09%和0.29%.
图4(a)表示无人驾驶车辆系统控制输入前轮转向角响应;图4(b)表示无人驾驶车辆系统左后轮转速响应;图4(c)表示无人驾驶车辆右后轮转速响应.两种控制方式在相同情况下开始运行,由图4中仿真曲线和数据可知,无人驾驶车辆系统在MFAC控制器的作用下控制输入值始终稳定在漂移稳状态;而在PID控制器作用下,控制输入值会有较大的偏差,会导致控制不稳定且破坏系统漂移稳定,使无人车辆不能持续保持在漂移状态.

图4 基于MFAC和PID算法的性能比较Fig.4 Performance comparison between MFAC and PID algorithm
综合仿真图3-4中的仿真结果,可看出在MFAC控制情况下,各转态参数均稳定在期望值附近,且稳态误差比PID控制情况下小,由此可以看出本文提出的MFAC控制算法的控制效果优于PID的控制效果,且控制效果良好.
注8无人驾驶车辆实际运行过程中,不同运行速度下,有不同的满足漂移的运行状态,即对不同的运行速度,车辆需要保持跟踪不同侧滑角和偏航率以保持车辆的稳态漂移.本节仿真过程分析了一种速度工况下的漂移状态,其他工况的漂移动态控制可以采用同样的方法进行控制进行.
4.2 改变系数λ的控制仿真对比
仿真中,无模型自适应控制算法的控制系数设置为η=µ=ρ=1,ε=10−5,伪雅可比矩阵初始值设定与上节相同,权重因子λ的参数分别设置为1.5,5和10,分别针对权重因子1.5,5 和10进行仿真,得到的仿真曲线图5-6.
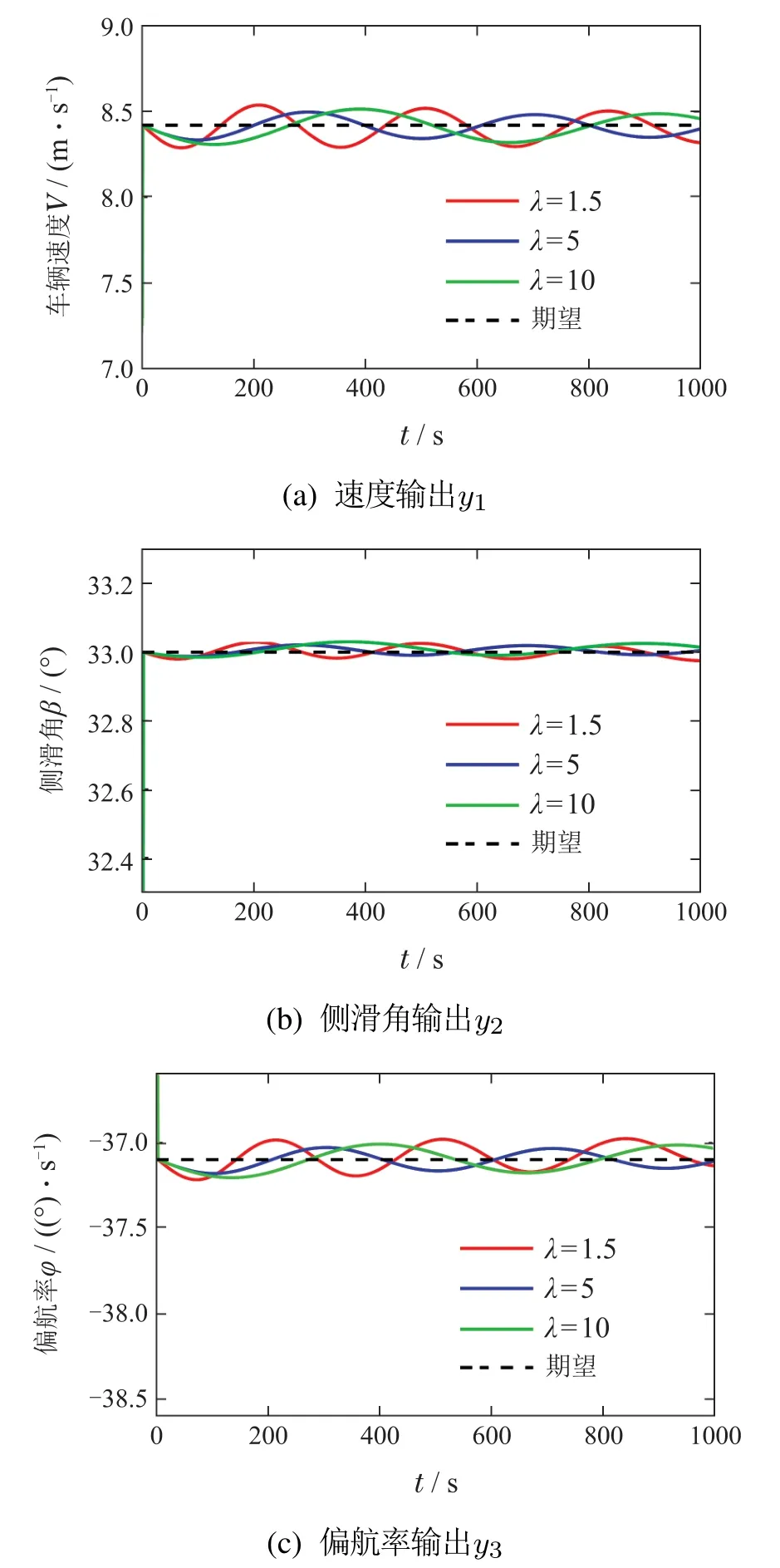
图5 不同参数的MFAC控制下的性能比较Fig.5 Performance comparison of MFAC with different parameters
由图5-6中的仿真图可知,随着权重因子λ的增大,系统输入输出参数值的波动频率减小且误差变化减慢,表明增大权重因子λ可以使车辆稳态漂移过程更加平稳进行.同理,由图5-6中的仿真图可知,增大权重因子λ会使曲线波动超调量增大且波动误差值变大,从而导致车辆漂移过程中偏离稳定状态的幅值增大,不利于无人车辆漂移过程的稳定运行.因此,权重因子λ的值的设定需要根据无人车辆及运行过程中的实际情况来进行设定,才能达到期望的控制效果.
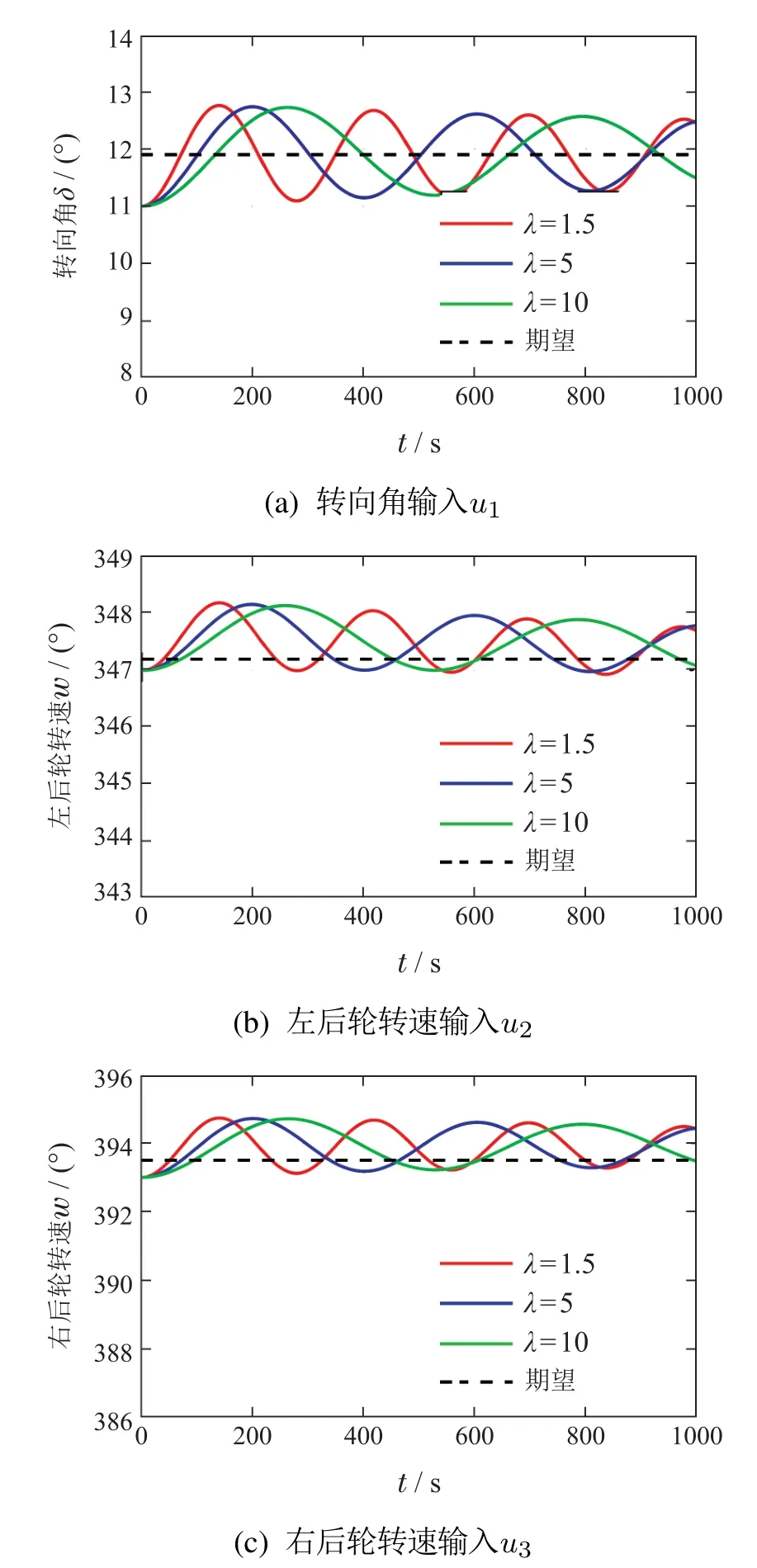
图6 不同参数的MFAC控制下的性能比较Fig.6 Performance comparison of MFAC with different parameters
综合仿真图5-6中的仿真结果,可以得结论:在不需要涉及模型信息的基础上,利用所提出无模型自适应方案控制无人驾驶车辆的稳态漂移动态过程,可以使无人车辆在漂移过程中快速到达稳态漂移状态.此外,同样可以看出,在控制过程中无人车辆控制系统具有较小的稳态误差,也就是说基于无模型自适应控制的无人车辆控制系统可以通过调整权重因子保证控制系统良好的稳定性,进一步验证了提出控制算法的有效性.
4.3 增加外部扰动后的MFAC和PID控制下系统状态误差仿真对比
考虑实际运行情况,在无人驾驶车辆进行稳态漂移的过程中,车辆可能会受到外部干扰.考虑路面变化的影响,车辆转向角可能会由于路面问题而发生波动.因此在此仿真实验部分,对控制输入量δ在仿真过程中增加一个突发扰动项∆δ,验证控制算法对外部扰动的抑制能力,仿真曲线如图7所示.

图7 增加扰动后MFAC和PID算法状态控制误差比较Fig.7 Comparison of state control error between MFAC and PID algorithm after adding disturbance
图7(a)表示车辆速度误差比较,图7(b)表示车辆侧滑角误差比较,图7(c)表示车辆偏航率误差比较.由仿真图和数据可以看出,无人驾驶车辆在MFAC控制下,在突加扰动的情况下仍能保持车辆动态稳定运行,施加扰动后车辆运行过程中速度误差最大为4.44%,侧滑角最大误差为0.33%,偏航率最大误差为0.97%;而在PID控制下,施加扰动后车辆运行过程中速度误差最大为4.6%,侧滑角最大误差为0.63%,偏航率最大误差为0.99%.
综合图7的仿真结果分析,可以看出MFAC控制算法对系统外部突发扰动具有有效的抑制作用,控制稳定性良好.
5 结论
针对无人车辆系统建模复杂而难以精确建模,对且参数多、耦合性强的多变量复杂无人驾驶车辆进行稳态漂移控制,传统的模型控制方法控制效果不稳定,会存在较大的误差和波动.因此,本文基于数据驱动控制方法,引入一种新的多输入多输出的无模型自适应控制方案.以车轮转向和后轮转速为控制输入,设计无模型自适应控制器,对无人驾驶车辆稳态漂移状态进行稳定控制.进而设计伪雅可比矩阵估计与重置算法,充分发挥伪雅可比矩阵的自适应性,通过对比仿真实验,验证该算法对无人驾驶车辆控制系统稳定性和有效性.
猜你喜欢
遗传(2022年9期)2022-10-10
汽车维护与修理(2022年5期)2022-09-06
大电机技术(2022年3期)2022-08-06
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
小学生学习指导·爆笑校园(2019年6期)2019-09-10
专用汽车(2018年10期)2018-11-02
科学大众(中学)(2017年3期)2017-07-06
红蜻蜓(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
