
电压控制型并网逆变器瞬时功率降阶控制方法
2021-02-03 07:41:00全相军张从越吴在军唐成虹窦晓波胡秦然
电力系统自动化 2021年2期
全相军,张从越,吴在军,唐成虹,窦晓波,胡秦然
(1. 东南大学电气工程学院,江苏省南京市210096;2. 国电南瑞科技股份有限公司,江苏省南京市211106)
0 引言
随着化石能源的枯竭和自然环境的恶化,基于电力电子器件的新能源发电技术受到了广泛关注[1-2]。为充分利用可再生能源,现有光伏、风电等新能源多追求最大功率输出,但其间歇性出力特征也给电网稳定运行带来了一系列不利影响[3-5]。因此,研究能够主动参与电网支撑、动态支持电网频率/电压调节的逆变器控制方法,可以有效提升分布式电源接入水平,提高可再生能源渗透率。
现有电压控制型并网逆变器具有多源功率共享、可脱离锁相环运行、孤岛运行等优点[6-7],得到了广泛关注。目前,控制方法主要包括下垂控制和虚拟同步发电机(virtual synchronous generator,VSG)控制。传统下垂控制多关注功率稳态分配,难以兼顾动态性能。因此,衍生出了如自适应[8]、前馈[9]等改进型下垂控制算法。文献[10]采用P-δ控制及比例- 积 分- 微 分(proportional-integral-derivative,PID)控制,增加调节自由度,提高下垂控制的动态性能;文献[11]提出了基于比例-微分(proportionalderivative,PD)控制的下垂控制方法,通过引入额外的自由度实现对逆变器系统动态性能的改善。
相较于下垂控制,VSG 控制更加关注惯性的模拟,实现在电网频率变化时提供一定的惯性缓冲,减缓电网频率的变化速度[12-15]。早期的VSG 控制参数一般直观地根据经验设置[13,16],难以获得满意的性能。文献[14]通过插入微分项方法改善系统惯性控制,有效降低了阻尼系数对有功功率的影响。近年来,VSG 的研究多集中于建模与控制参数设计以及稳定性分析,已有较多文献对VSG 控制参数的设计问题进行了分析和讨论[16-20]。VSG 的有功环为二阶控制系统,其阻尼比影响系统的稳定性和动态性能[20],且VSG 各参数相互耦合,各自代表的物理意义存在矛盾,因此对于最终参数的确定需要综合各项性能指标[21]。文献[19-21]对VSG 进行了建模与小信号分析,给出了功率解耦和功率控制的参数配置方法。进一步,文献[22]指出下垂控制与VSG是等效的,其下垂系数和阻尼系数仅代表不同的物理意义,但是数学过程相同,从数学本质上指出了下垂控制和VSG 的控制自由度不足。文献[23]指出在传统控制结构下,摇摆方程阻尼系数与下垂系数为非独立变量,无法同时满足独立时间常数、阻尼系数等动态性能调节的要求,该结论与文献[21]不谋而合。
综上所述,当前电压控制型并网逆变器的功率控制算法中,主要存在以下问题:①并网瞬时功率阻尼水平较低,瞬时功率往往存在振荡或者超调现象(主要原因在于系统有功控制为二阶系统);②下垂和阻尼系数耦合造成的控制自由度不足,使分布式电源无法同时满足期望功率-频率调节幅度与阻尼水平的要求。为此,本文提出一种适用于电压控制型并网逆变器的瞬时功率降阶控制方法。首先,根据系统瞬时功率模型提出瞬时有功功率惯量支持控制及下垂控制;其次,基于零极点消除思想并引入参考值前馈控制,提出将有功控制环路降为一阶环节的设计方法,可有效改善瞬时功率动态性能和提升系统阻尼水平,进而实现了功率-频率调节幅度和阻尼系数的独立设计。最后,搭建实验平台验证了本文所提功率控制算法的有效性与正确性。
1 电压控制型并网逆变器并网系统
1.1 瞬时功率控制设计
电压控制型并网逆变器功率控制如图1 所示,逆变器内环控制为滤波电容电压控制,形成受控电压源,经电感并网后,外环采用并网功率控制,实现下垂或者功率同步与惯性模拟功能[14]。图1 中:Cd为直流电容;udc为直流电压;R,L,C分别为LC 滤波线路电阻、电抗和电容;uC为滤波电容两端电压;iL为经滤波后的逆变器输出电流;Lg和Rg分别为逆变器并网线路电感和电阻;ig为电网电流;ug为并网电压;p和q分别为逆变器瞬时有功和无功出力;pref和qref分别为给定有功功率和无功功率参考值;Vg为并网电压幅值;ωg为电网频率;Vn和ωn分别为给定稳态有功幅值和频率参考值;Dp和Dq分别为逆变器下垂有功和无功增益系数;kiq和kip分别为有功和无功功率传递回路微分增益系数;kiω为频率传递支路微分增益系数;Vref,δref和ωref分别为内环电压幅值、相角和频率参考值;PWM 表示脉宽调制;PLL 表示锁相环。
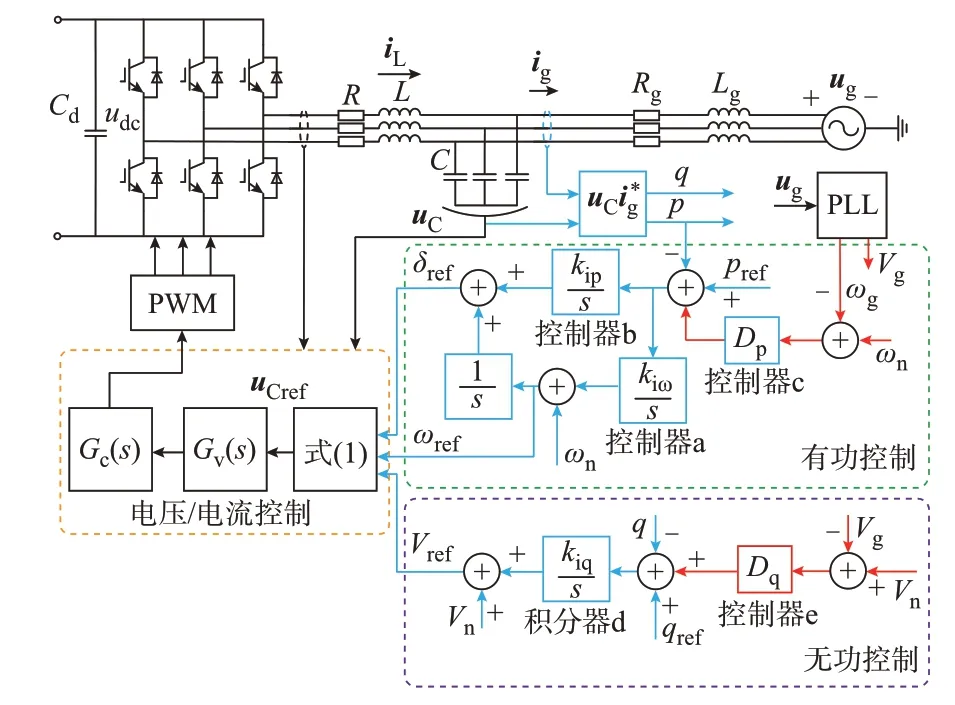
图1 电压控制型并网逆变器功率控制框图Fig.1 Block diagram of power control of voltagecontrolled grid-connected inverter
图1 中逆变器的功率外环控制分为2 个部分,蓝色线条表示有功/无功跟踪控制及惯性模拟控制,红色线条表示下垂控制。蓝色线条为功率控制,此部分不依赖于红色线条的下垂部分,实现功率跟踪和惯量支撑作用,主要针对直流侧配备功率型储能设备而设计,可以独立运行,实现功率跟踪与惯性功能。对于有功控制,控制器a 主要实现电网同步,控制器b 维持系统稳定,控制器c 用于实现有功下垂控制。对于无功控制,积分器d 实现无功功率的跟踪控制,控制器e 用于实现无功下垂控制。由于本文主要关注有功控制,因此后文中无功控制将不再赘述。此外,为了实现有功功率系统的降阶及调节时间的自由整定,本文引入了前馈控制环节,未在图1中画出,将在下文中具体说明。
1.2 瞬时功率模型
由于本文采用瞬时功率作为控制变量,因此需要建立控制变量与瞬时有功功率和无功功率之间的数学关系。令a3=1/Lg,图1 中线路电感动态方程为:

考虑电容电压控制环路带宽远高于功率控制环,可忽略电容电压瞬态分量,则电容电压稳态表达式为uC=Vejωt,其导数为duC/dt=jωVejωt=jωuC。此时,瞬时功率表示为S=uCi*g=p+jq。对瞬时功率求导并整理后可以得到:
该结论与传统的基于相量表示的功率模型一致。因此,忽略线路电阻后,可以得到与相量表示法下相同的功率模型[14-16]:
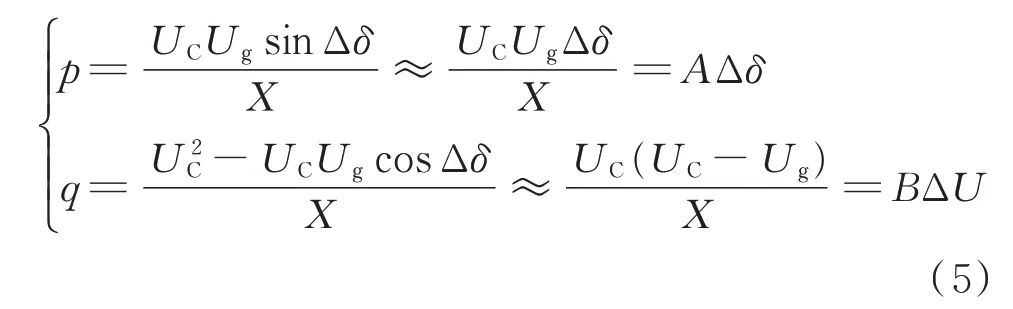
式中:Δδ为逆变器与电网之间的相角差;ΔU为逆变器与电网电压幅值差;X为线路电感值;UC和Ug分别为逆变器输出电压幅值和并网点电压幅值;A和B分别用于表征相角差到有功功率的增益和电压幅值差到无功的增益。
2 控制参数设计
2.1 有功惯量支持控制设计
本文所设计的惯量支持指在电网频率变化时,逆变器发出或者吸收一定的冲击型有功功率,实现短时的功率支持,降低系统频率变化速度,阻止其快速跌落;而当系统频率不再变化时,功率输出为零。该工况适用于直流侧配置超级电容等功率型储能装置,便于维持储能的荷电状态。相关设计目标[24]主要为:①实现输出功率无静差控制,且具有较好的动态响应,此为功率控制的基本需求;②实现在电网频率变化时刻快速功率支撑调节幅度和时间能够独立自由设计。
因此,需要明确上述性能与控制参数之间的关系,从而通过对控制参数的调整,调节功率幅度及调节时间。
根据图1 中的控制设计可知,逆变电压与电网电压相角差由2 个部分组成:一是直接来自积分器b的相角差;二是逆变器与电网频率差经过积分器后所引入的相角差。总相角差与功率存在式(5)所示的关系,由此可得到如图2 所示的惯量支持控制小信号框图(不包括下垂控制部分)。
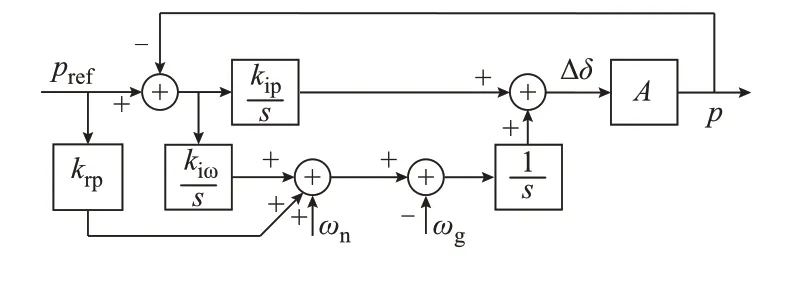
图2 本文所提惯量支持控制算法结构Fig.2 Structure of the proposed inertia support control algorithm
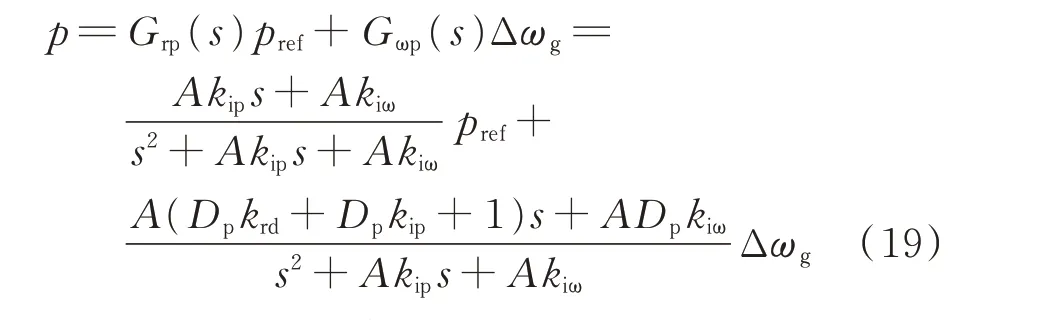
暂忽略引入的有功功率参考前馈系数krp,得到如下传递函数:
式中:Δωg=ωn-ωg为电网频率变化量;Grp(s)为有功功率参考到有功功率输出的传递函数;Gωp(s)为电网频率变化量到有功功率输出的传递函数。
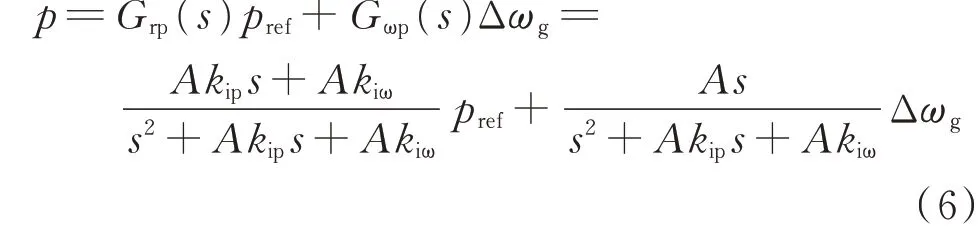
由式(6)可知,Grp(0)=1 且Gωp(0)=0,说明该控制能够实现无静差跟踪控制,且在电网频率变化时,Gωp(0)=0,实现了短时的惯量支持功能。然而,该控制策略仅包含2 个控制参数kip与kiω,且这2 个参数之间存在的耦合造成响应时间和阻尼比难以独立调节。同时,由于Grp(s)存在一个不可控零点,导致系统仍存在超调[25]。此外,随着kip与kiω的增加,Gωp(s)幅值也相应地减小。因此,功率幅度和调节时间难以同时达到最优。为此,本文引入参考值前馈krp,此时系统的传递函数变为:
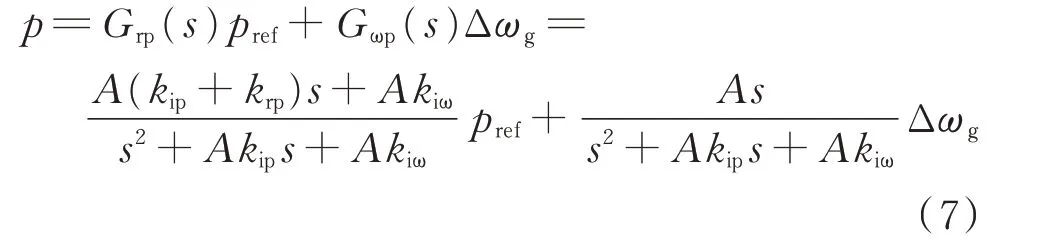
由式(7)可见,由于参考值前馈的引入,传递函数多了一个可以配置的零点。因此,可通过配置引入的零点,对Grp(s)进行零极点相消,使得系统降阶为一阶系统。将式(7)写成零极点模式:

式中:z为零点;p1和p2为极点。
对比式(7)与式(8),可得到kip和kiω与零极点之间的关系为:
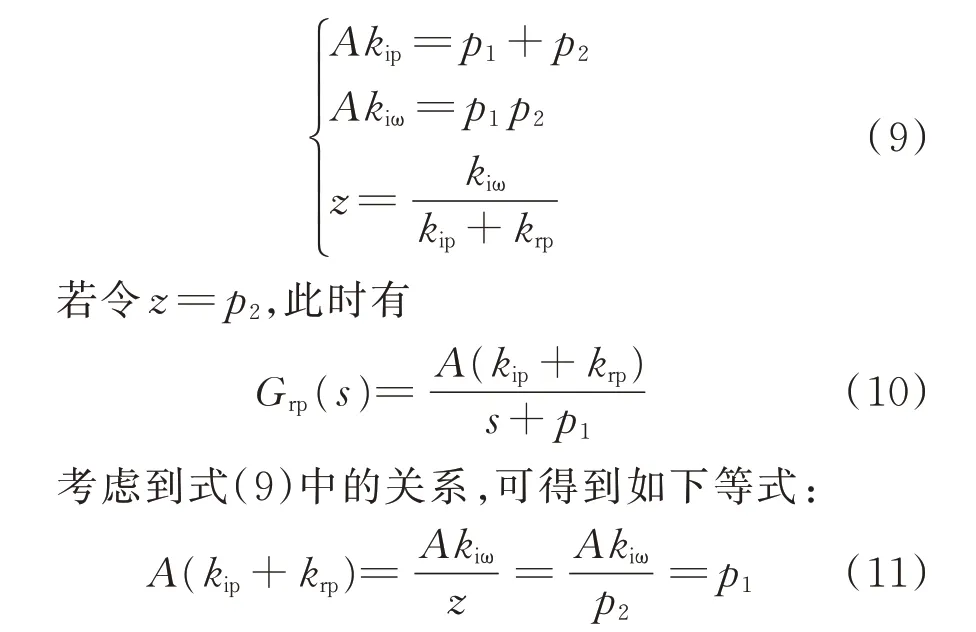
因此,式(10)为以p1为自然频率的一阶低通滤波器,有
p1决定了上式的时间常数,且无超调,因此可使得有功功率跟踪控制获得满意的动态性能。该有功控制环的调节时间可由p1值设计,考虑系统进入稳态值1%范围内的调节时间可由公式TAset=4.6/p1确定[26]。选定调节时间后,时间常数p1即可确定,确定p2的大小之后,kip,kiω与krp可通过式(9)得到。此外,需要说明的是,从功率控制环角度,调节时间TAset可以设计得很小,即功率具有很快的响应速度,且只要系统具有负根p1>0,即可理论上保持功率环的稳定性。然而,当考虑到电压内环时,TAset不可设计得过小,因为若TAset过小,与电压内环时间常数相近时,功率环不能忽略电压内环的动态过程,从而使得前述的功率模型失去其正确性,极有可能引起功率的振荡或不稳定。因此,功率环时间常数的设计一般应高于5~10 倍的电压内环时间常数,从而达到带宽上解耦的目的。
此外,Gωp(s)的幅度可由p2调节,重写Gωp(s)为零极点模式:
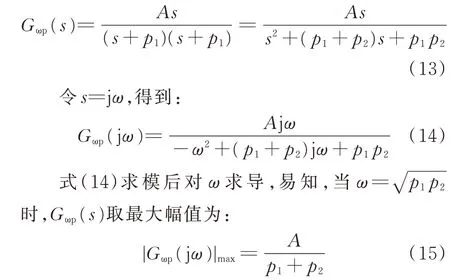
由式(15)可知,p2可定量地确定单位电网频率变换时有功功率的变化幅度。令ΔP表示电网变化1 Hz 时有功功率变化的幅度,则p2可由下式确定:

由上所述,本文所提有功惯量支持控制算法流程如下。
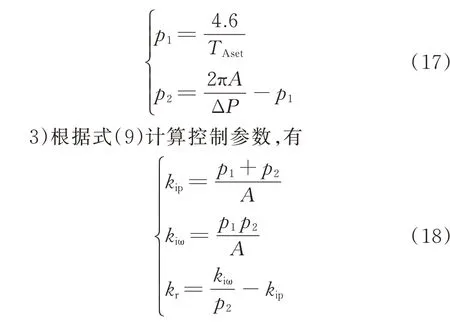
1)确定调节时间TAset及电网频率变化1 Hz 时有功功率的变化幅度ΔP。
2)依照TAset以及式(16)计算2 个极点,有
2.2 有功下垂控制设计
考虑到若直流侧配备能量型储能装置,为保证逆变器控制可以响应系统频率偏差,进行长时间尺度下持续的有功支撑。基于上文有功惯量支持控制可进一步设计有功下垂控制,此部分的设计目标主要为:①输出功率的无静差控制及较好的动态响应;②当电网频率变化时,系统有功支持的额度可通过下垂系数的调整,从而改变功率支持大小,且下垂系数的变化不影响功率控制的动态性能。
图3 为下垂控制小信号控制框图,其功率传输模型为:
式中:krd为引入的频率变化量前馈系数。
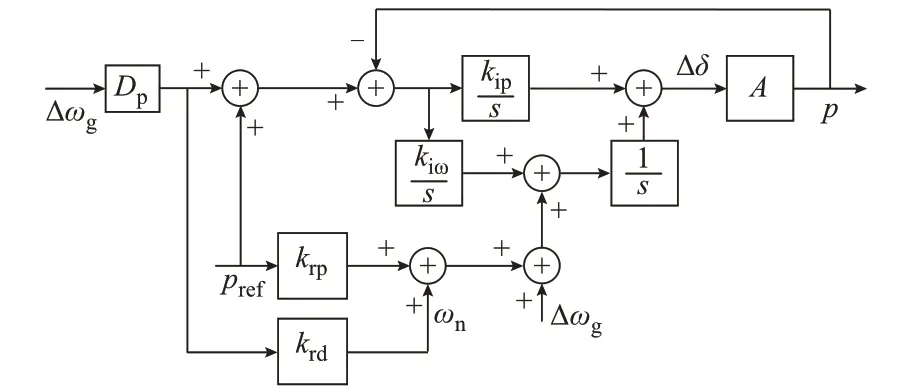
图3 本文所提下垂有功控制框图Fig.3 Block diagram of the proposed droop control of active power
式(19)的稳态响应为Grp(0)=1,而Gωp(0)=Dp,Grp(s)与惯量支持控制相同。可知,输出功率能够实现无静差跟踪控制,且时间频率变化实现Dp倍下垂控制。
此外,考虑到功率下垂控制动态性能往往涉及与电网的交互影响,所以希望下垂功率动态性能也能够实现无超调及时间常数的可调控制。因此,对式(19)采用与式(8)惯量控制相同的方法进行设计,此处Grp(s)与有功功率惯量支持控制相同,不再赘述;Gωp(s)设计采用相同的方法对其动稳态性能进行定量的设计,写成零极点模式有:

其中零点表达式为:

首先,同样采用ΔP表示电网变化1 Hz 时稳态有功功率输出大小,则Dp=P/(2π)。选择p1=4.6/TAset作为主极点用于调节功率动态调节时间。然后通过设计krd使得z=p2。此时,p2为自由变量,可随意配置,因此可以通过选择适合数值求取相对较小的kip与kiω,有
由式(12)可知,此时Gωp(s)被设计为一阶系统。通过对极点p1和增益系数Dp的配置设计,可以分别实现对电网频率变化时功率响应的调整时间和调节幅度的整定。
2.3 鲁棒性分析
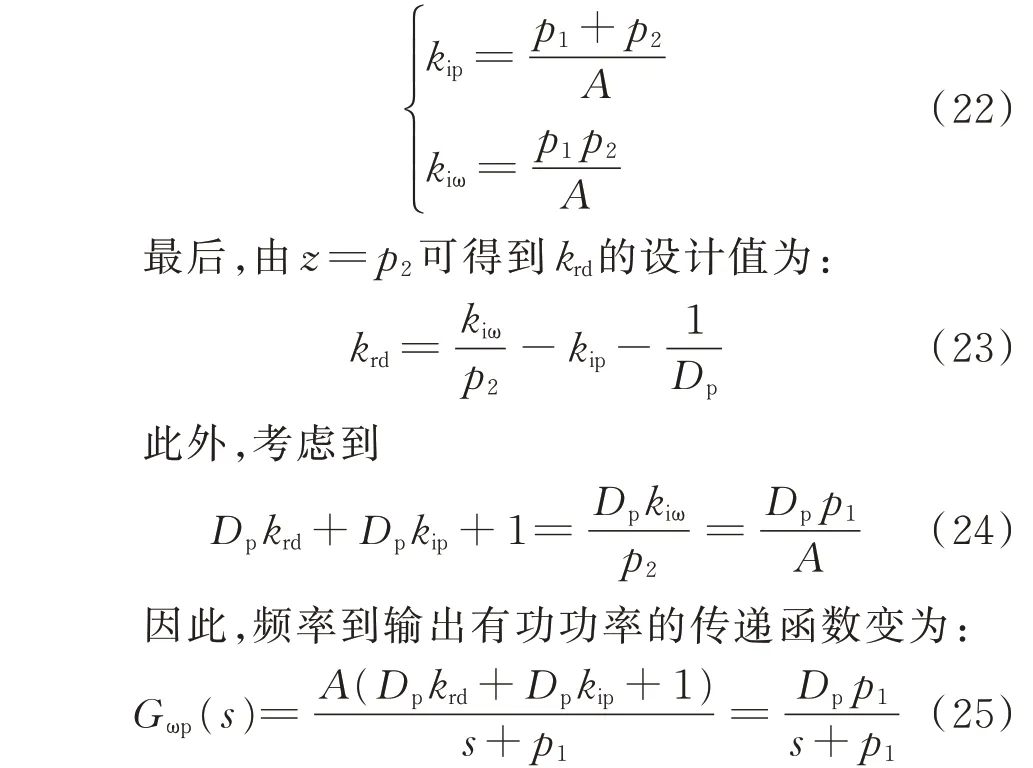
上文所提控制算法基于相角差到有功功率的增益A,影响A的因素主要有3 个方面:①线路参数变化,如线路电抗、电阻的微小变化;②系统电压的变化;③sin Δδ线性化为Δδ引起的误差。因此,有必要分析A变化情况下,所设计控制算法的鲁棒性。当A变A',传递函数变为(以Grp(s)为例):

式中:λ=A'/A。
式(26)中,零点不随λ变化,极点则随着λ变化而变化,因此考察λ变化时的系统极点变化情况,如图4 所示。当λ增加时,即A变大时,极点分离;反之,则极点相互靠近,直到进入欠阻尼状态。然而,在合理变化范围内,极点p2移动范围较小,零点与极点p2距离很近,因此本文提出的零极点消除效果仍然存在,具有一定的鲁棒性。
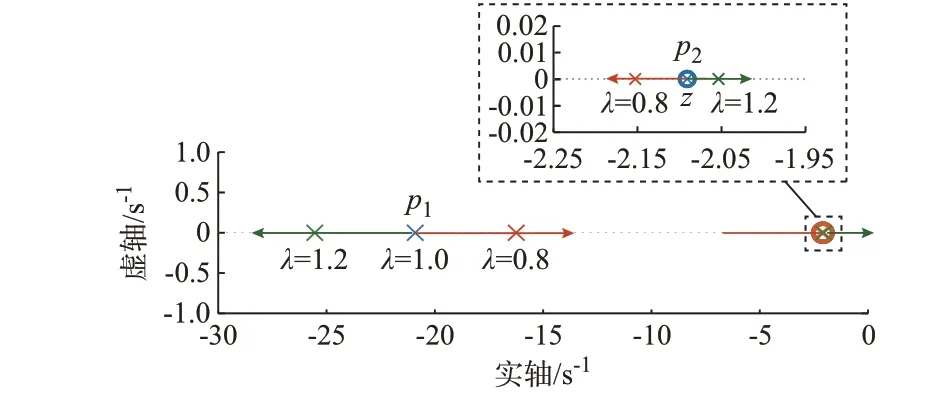
图4 λ 变化时的系统p1和p2根轨迹图Fig.4 Root locus plot of p1 and p2 with variation of λ
3 实验验证
为了验证本文所提出的瞬时功率控制算法,搭建了超级电容功率变换器实验平台。超级电容通过DC/DC 变换器接入直流母线,系统电压参数取为额定值,UC=Ug=170 V,额定频率为ωn=120π rad/s,电抗为X=0.678 54 Ω(并网电感Lg=1.8 mH)。控制器采用32 位浮点运算双核DSP TMS320F28379 D,所有功率波形显示均为瞬时功率。
3.1 参数设计实例
首先,基于上述电路参数,根据前述有功惯量支持控制算法设计流程,给出了3 种不同设计指标的设计实例,设计结果如附录A 图A1—图A3 所示。图A1、图A2、图A3 分别为配置调节时间TAset=0.5 s、功率变化ΔP=15 kW,调节时间TAset=2 s、功率变化ΔP=10 kW,调节时间TAset=5 s、功率变化ΔP=15 kW 的仿真对比。从对比中可以观察到,系统的调节时间和调节幅度在不同的配置指标下都能够匹配给定的设计指标。此外,也可观察到当电网频率降低1 Hz 时,即Δωg=ωn-ωg=2π rad/s 时,系统输出短时的脉冲功率,试图阻止系统频率下降速度,此即为惯量支持作用。
3.2 功率跟踪控制
首先,为了验证本文功率跟踪控制的调节时间可定制以及良好的动态性能,对4 种时间常数(0.05,0.5,2,5 s)下的控制效果进行实验分析。
调节时间设计为0.05 s 时,功率阶跃响应如图5所示。有功功率和无功功率参考值首先由0 分别跃变为-5 kW 和-5 kvar,然后功率参考值变为0。由图可知,当参考值变化时,输出功率实现无静差跟踪控制,调节时间约为0.05 s,没有超调。此外,图中功率存在小幅度纹波,产生的原因是功率的调节时间设计得过小,为0.05 s,带宽较高,约为92 Hz(一阶系统带宽即为其特征根)[26],该控制带宽不仅会与电压内环产生交互影响,且对二倍频功率波动衰减较小,因此会产生功率波动现象。
调节时间设计为0.5 s 时,功率阶跃响应如图6所示。通过图6 中的有功和无功功率变化波形,可以观察到在系统给定功率参考变化后,系统的瞬时有功功率及无功功率都能够实现无静差跟踪控制,调节时间都满足给定的0.5 s,具有较好的动态性能。
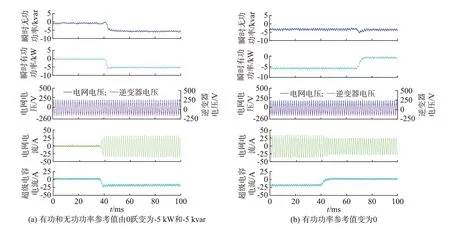
图5 调节时间设计为0.05 s 时的功率阶跃响应Fig.5 Power step response with designed adjustment time of 0.05 s
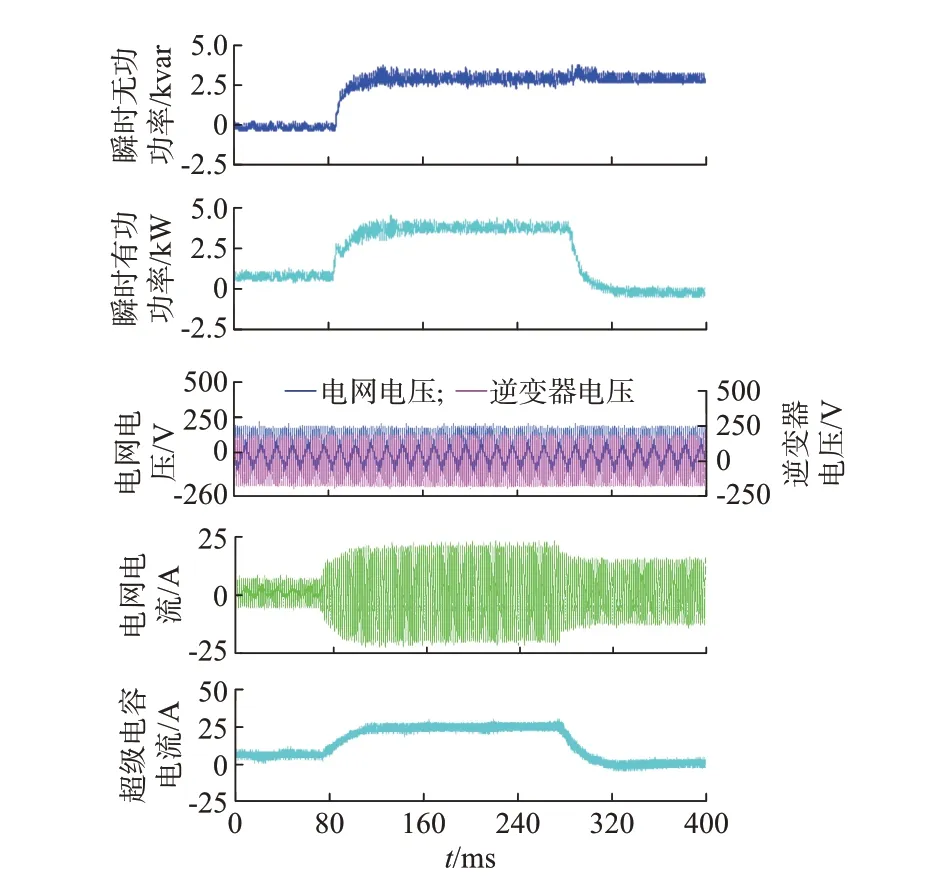
图6 调节时间设计为0.5 s 时的功率阶跃响应Fig.6 Power step response with designed adjustment time of 0.5 s
调节时间设计为2 s 和5 s 时的功率阶跃响应如附录A 图A4 所示,由图可知,瞬时功率控制实现了无静差控制,功率调节时间为2 s 和5 s,系统动态响应与一阶系统相似,与前文理论分析一致。附录A图A4(b)中,由于实验时超级电容电压较低,此时输出一定的功率时,电流较大,从而造成超级电容电压下降较快。为了维持输出功率的恒定,进一步使得输出电流增加的幅度更大,从而出现了图中超级电容电流持续增加的现象。
附录A 图A5 所示为本文所设计的功率控制方法与传统基于摇摆方程的功率控制方法下的功率阶跃响应对比。由图可知,在有功功率参考值变为2.5 kW 以及恢复为0 的过程中,本文设计的功率控制方法能够通过惯性支撑减缓功率波动速度,相较于传统摇摆方程,具有更好的阻尼特性,无超调。
3.3 有功惯量支持控制
为验证本文所设计的有功惯量支持控制功能的效果,实验分别对系统配置了不同的响应时间和调节幅值进行横向对比。
图7 与附录A 图A6 分别展示了功率变化ΔP=15 kW 下调节时间TAset为0.5 s 和2 s 时的实验结果。通过对比可以观察到,在相同的电网频率变化情况下,系统的脉冲功率变化和调节时间能够有效匹配给定要求。
附录A 图A6 和图A7 分别展示了调节时间TAset=2 s 时功率变化ΔP为15 kW 和10 kW 下的对比实验结果。观察到,在相同的频率变化情况下,二者的功率响应时间基本相同,但功率变化幅度不同,图A6 中功率变化幅度为7.5 kW,而图A7 中功率变化幅度则为5 kW,验证了所提方法的有效性。
3.4 下垂控制
进一步验证本文实际逆变器系统下垂功率控制的有效性,设计了不同调节时间和下垂系数的实验。
图8 给出了下垂系数Dp=20 kW/Hz、调节时间TAset=0.05 s 时的实验结果。由图可知,当电网频率下降0.25 Hz 时,系统输出5 kW 的有功功率,阻止电网频率下降,且调节时间约为0.04 s,当电网频率恢复60 Hz 后,系统有功功率归零。此外,图中出现了与图5 相同的功率振荡现象,其原因是相同的,即功率控制环带宽设计得过高,影响了系统的抗谐波扰动性能。
附录A 图A8 给出了下垂系数Dp=10 kW/Hz、调节时间TAset=0.05 s 时的实验结果,由该图可知,当电网频率下降0.5 Hz 时,系统输出5 kW 的有功功率,且功率的调节时间约为0.04 s。该对比实验证明了本文功率控制的正确性。
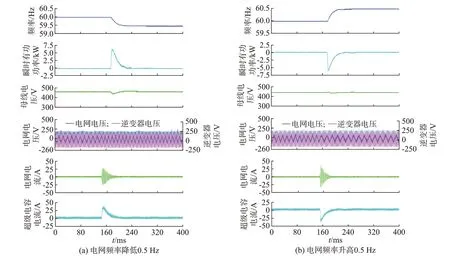
图7 惯量支持控制实验结果(TAset=0.5 s,ΔP=15 kW)Fig.7 Experiment results of inertia support control (TAset=0.5 s,ΔP=15 kW)
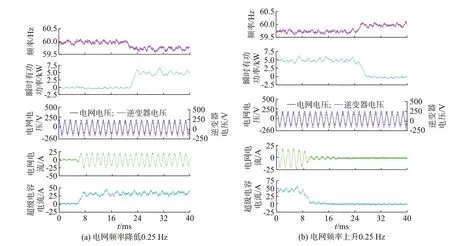
图8 有功下垂控制实验结果(TAset=0.05 s,Dp=20 kW/Hz)Fig.8 Experiment results of droop control of active power (TAset=0.05 s,Dp=20 kW/Hz)
此外,针对不同调节时间的功率控制设计,同样进行了实验验证,附录A 图A9 给出了调节时间TAset=2 s、下垂系数Dp=10 kW/Hz 时的实验结果。由该图可知,当电网频率变化0.5 Hz 时,逆变器功率变化5 kW,然而与附录A 图A8 相比,逆变器产生了不同的功率调节时间以及频率响应。功率调节时间实现了所设计的2 s。而频率响应不同则是因为前馈的作用,使得逆变器频率出现突变,用以抵消电网频率的突变,从而可抑制功率快速的大幅度变化,使得系统功率控制能够达到所设计的调节时间。
4 结语
本文针对电压控制型并网逆变器的瞬时功率控制,设计了时间常数与功率幅度可自由调节的有功惯量支持与下垂控制,提高了并网功率的动态性能。无论是下垂控制还是VSG 控制,常规电压控制型并网逆变器功率控制多为二阶系统,其有功控制大多存在超调及振荡现象。本文通过引入前馈控制策略,采用零极点消除的方法,成功将电压控制型并网逆变器的有功控制降阶为一阶模型,从而改善了功率控制的动态响应,且无论是针对惯量支持控制或者下垂控制,均实现了调节时间常数与功率-频率幅度的独立自由调节,从而为其参数的灵活设计提供了空间,以满足不同的电网应用需求。最终的实验结果验证了该控制算法的正确性。
本文使用锁相环获取电网频率,从而解耦下垂控制设计,然而锁相环需测量电网电压,与VSG 的无锁相环运行相矛盾,因此后续研究中,期望在无锁相环的情况下,实现下垂控制的性能提升。
本文工作得到美国得克萨斯大学奥斯汀分校Alex Q. Huang 教授的指导与大力帮助,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
现代电力(2022年2期)2022-05-23 12:46:16
数学大王·趣味逻辑(2021年11期)2021-12-03 11:04:30
汽车维修与保养(2021年8期)2021-02-16 00:28:20
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
工业设计(2016年4期)2016-05-04 04:00:15
河南电力(2016年5期)2016-02-06 02:11:32
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
河南电力(2015年5期)2015-06-08 06:01:46
