
一种用于海洋环境立体监测的数据传输系统
2021-02-03 07:43姚钘,李云,刘琼
数字通信世界 2021年1期
姚 钘,李 云,刘 琼
(1.桂林航天工业学院电子信息与自动化学院,广西 桂林 541004;2.国营长虹机械厂,广西 桂林 541004)
0 引言
海洋大约占据着地球面积的71%;而其中的水更是占据总水量的97%。它是人类赖以生存的重要组成部分,是社会可持续发展的宝贵财富[1]。近年来国家对海洋的关注度越来越高,《中国海洋经济发展报告2020》中指出“2019年,我国海洋生产总值超过8.9万亿元,海洋经济对国民经济增长的贡献率达到9.1%”[2],海洋在国家经济社会发展中的地位和作用日益突出。然而仍有部分人只注重短期的经济发展,以牺牲海洋生态环境为代价,“鼓了自己的钱袋,毁了美丽的生态”,海洋环境的破坏程度令人触目惊心,海洋环境的实时监测迫在眉睫。2017年5月4日,国家发展改革委、海洋局联合发布《全国海洋经济发展“十三五”规划》,规划中明确指出要提升海洋公共服务业,推进高新信息技术与海洋产业深度融合,加强海洋信息化体系建设,推进国家海洋环境实时在线监控系统和海外观(监)测站点建设,逐步形成全球海洋立体观(监)测系统,加强对海洋生态的观测研究[3]。而目前现行的海洋环境监测系统大都以浮标为主,这类系统存在着较大的缺陷,例如部分系统中的浮标采集后仅能存储在本地,而后等待人力回收进行处理,遗失较多且人力成本较高;部分浮标虽配备了BD/GPS或4G/5G 等回传通信模块,但在远海区域信号质量较差,往往无法回传造成失效,如何解决此类问题成为现下需要解决的关键任务,本文介绍的数据传输系统正是在上述背景下应运而生的。
1 设计思路
本系统是以现有海洋浮标系统为基础进行的升级改造,以形成“天 -地-海”一体化的海洋环境立体监测能力的数据传输系统,响应国家建设全球海洋立体监测系统的规划目标。该系统主要分为四大部分:浮标子系统(若干远海浮标 +若干近海浮标)、水下无人航行器、水面无人船、地面控制站。浮标子系统在原有浮标系统新增水声通信链路,组成浮标数据网,由于远海浮标信号质量较差,因而通过浮标组网将部分监测数据传输至近海浮标,而近海浮标则通过4G 移动基站(或北斗卫星报文系统,优先4G 网络)与地面控制站通信;由于浮标间隔距离问题,浮标间监测存在空白,水下无人航行器和水面无人船定期进行固定航迹巡游,以此类机动平台解决监测存在空白区域的问题,同时以类似“蜜蜂采蜜”方式采集浮标的大数据量信息,解决水下生态图片、视频等数据采集问题;地面控制站负责监测数据的接收和处理以及相关控制指令的下发,从而完成人机系统的闭环。本系统的整体架构图如图1所示。

图1 数据传输系统整体架构图
2 技术实现方案
本系统的组成如上节所述,主要由四个部分组成:浮标子系统、水下无人航行器、水面无人船、地面控制站,其中人员是与地面控制站进行交互,因此,以地面控制站为主体进行本系统的工作过程划分,主要分为下发指令和收集数据两类任务。
下发指令的工作过程:地面控制站(控制指令源)根据信号质量情况选择使用4G 移动基站或北斗卫星将控制指令发送至近海浮标,近海浮标转发该控制指令至整个浮标网,当该消息包 ID 与某浮标相符时则该浮标执行指令,从而达到控制的目的;地面控制站对于水下无人航行器的控制是由近海浮标接收后通过浮标网转换为水声信号发送,当消息ID 与水下无人航行器设定 ID一致时,水下无人航行器则执行该条指令;水面无人船与地面控制站的通信有两类途径:一类与水下无人航行器类似,一类是通过4G 移动基站或北斗卫星传输控制指令,这类方法仅在近海适用。上述下发指令工作过程的信号流向图如图 2所示。
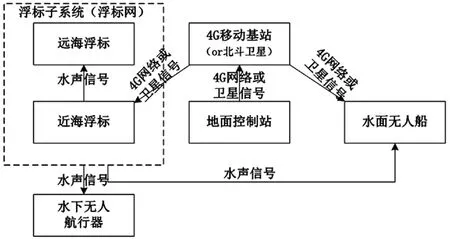
图2 下发指令工作过程的信号流向图
采集海洋环境数据主要由浮标子系统负责,这其中包括小数据量的水质参数等数据,大数据量的水下生态图片视频等数据,针对这两类数据系统采取两类不同的方法进行收集。具体收集数据工作过程的信号流向图如图3所示。

图3 收集数据工作过程的信号流向图
收集小数据量数据(水质参数等)的工作过程:浮标子系统中的远海浮标和近海浮标共同负责收集数据,近海浮标直接通过4G 移动基站或者北斗卫星将数据送回至地面控制站,而远海浮标由于4G 等信号较差无法直接将数据送回,转而通过水声信号借助浮标网转发至近海浮标后,使用4G 移动基站或者北斗卫星将数据送回至地面控制站,以此实现收集数据的目的,至此所有浮标采集的小数据量数据均能传回地面控制站。
收集大数据量数据(图片视频等)的工作过程:近海浮标可通过4G 移动基站直接将大数据量数据传回,而远海浮标由于水声信号的速率限制,仅几kbps,无法直接传回大数据量数据。因而使用水面无人船、水下无人航行器按照“蜜蜂采蜜”的原理,使得水面无人船按照固定航线定点航行至远海浮标附近使用 Wi-Fi 信号接收远海浮标数据存储至内部SD 卡后返回,同样水下无人航行器至远海浮标附近后利用光信号接收该浮标数据存储至内部 SD 卡后返回,至此即可完成收集所有浮标采集的大数据量数据。
通过上述的流程即可实现对海洋环境的立体监测,而用以支撑此流程的组成部分具体硬件实现方案如下所述(以浮标子系统为例)。
浮标子系统主要分为两类:远海浮标和近海浮标,远海浮标的硬件方案较近海相对简单,下面分别对这两类的硬件结构进行介绍。
远海浮标硬件结构包括 STM32F405模块、水声通信模块、 Wi-Fi 模块、 CTD 传感器、相机、光通信模块、 SD卡、电源转换八个部分。其中电源转换将浮标电源 16 V 转换为系统所需的 5 V、3.3 V、12 V 电压,供给其他七个部分使用; STM32F405模块作为主控,与水声通信模块通过 UART 接口连接,用于将相关信息转换成水声信号传输;与 CTD 传感器通过 UART 接口连接,相机通过 I2C 接口连接,用于获取水质参数及水下生态图片视频等;与 Wi-Fi 模块、光通信模块均分别通过 SPI 接口连接,用于将相关信息转换无线信号、光信号传输;与 SD 卡通过SDIO 接口连接,用于存储CTD 传感器、相机产生的水质相关数据。远海浮标的硬件结构图如图4所示。

图4 远海浮标硬件结构图
近海浮标硬件结构与远海浮标类似,仅比其多2个模块:4G 通信模块和北斗模块,这两个模块均通过UART 接口与STM32F405主控模块连接,用于将水质参数等小数据量信息转发至地面控制站,也将地面控制站的相关控制指令传至STM32F405主控模块进行后续处理。近海浮标的硬件结构图如图5所示。
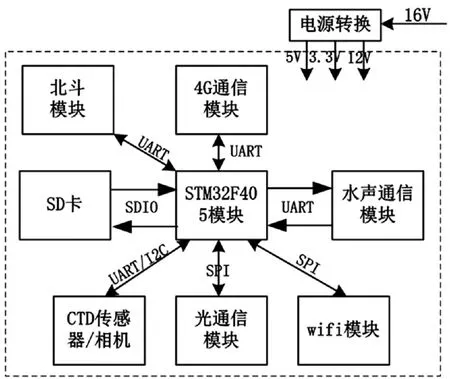
图5 近海浮标硬件结构图
3 结束语
习总书记曾在调研时指出“发展海洋经济、海洋科研是推动强国战略重要方面,一定要抓好,关键的技术要靠自主研发,海洋经济的发展前途无量”[4]。作为对于海洋经济有着重要影响力的海洋环境,一种对其进行实时而准确监测的系统将是后续发展的必然需要。本文介绍的数据传输系统正在在此领域的一次探索,主要从系统总体设计思路以及各组成部分的实现方案两个方面分别进行了详述,其数据传输实时性较现有系统有所提升且使用方便,同时可对海事部门布放的原有浮标系统进行升级改造,因而成本相对较低,有较强的实际应用价值。
猜你喜欢
北京大学学报(自然科学版)(2021年3期)2021-07-16
电脑爱好者(2020年19期)2020-10-20
电子制作(2019年13期)2020-01-14
科技风(2019年31期)2019-12-05
重庆与世界(2019年10期)2019-11-25
中国电气工程学报(2019年3期)2019-09-10
无人机(2017年10期)2017-07-06
商场现代化(2009年16期)2009-06-22
