
燃气发电锅炉主汽压滑模预测优化控制策略
2021-02-01 08:06:38章家岩王胜冯旭刚鲍立昌魏舜昊陈雨薇徐帅
西安交通大学学报 2021年1期
章家岩,王胜,冯旭刚,鲍立昌,魏舜昊,陈雨薇,徐帅
(安徽工业大学电气与信息工程学院,243032,安徽马鞍山)
主汽压是衡量发电锅炉蒸汽产量与负荷是否匹配的重要指标,反映了锅炉燃烧过程的能量平衡状态。锅炉燃烧控制系统的主要任务是根据汽轮机负荷来调整燃料供应量,从而达到保持主汽压稳定的目的[1-2]。炼铁和炼钢生产过程中产生的高炉煤气和转炉煤气是冶金企业自备电厂燃气发电锅炉的燃料。由于高炉煤气和转炉煤气压力和热值波动较大,所以燃气发电锅炉主汽压难以控制稳定,这将给发电机组的安全稳定运行带来严重的隐患[3-4]。
工程上针对锅炉主汽压通常采用常规的PID控制方法,难以达到理想的控制效果。为此,国内外专家学者进行了先进控制策略的研究。文献[5]针对主汽压被控对象模型参数不确定的问题,采用动态矩阵算法建立了多步预测、滚动优化和反馈校正的控制策略,提高了系统的鲁棒性,但并没有对系统的非线性作补偿,因此不能满足工程实际需要。文献[6]通过Smith预估器对主汽压的纯滞后进行补偿,利用RBF神经网络对PID控制器参数进行整定,进一步提高了主汽压控制系统的稳定性,但其本质上还是PID控制,对主汽压系统大惯性的抑制能力较弱,导致波形波动较大。文献[7]针对锅炉主汽压设计了一种延迟观测器的滑模控制策略,实现了蒸汽压力的一阶及二阶导数的延迟观测,具有较好的跟踪性能,但该研究只局限于理论分析仿真,并没有在实际工程中开展应用。
滑模控制(SMC)采用可变结构的控制原理,是一种特殊的非线性控制方法,其滑动模态控制律为非线性函数,控制策略根据系统的结构做出相应改变,因此对于处理模型参数易变的非线性系统效果良好[8-9]。减小高频抖振是滑模控制器设计的一个重要环节[10-11],而广义预测控制(GPC)是一种基于多步预测、滚动优化和反馈校正的自适应控制策略[12]。
综上,本文提出了将两种控制方法相结合的主汽压优化控制策略,利用GPC对SMC的增益进行实时预测,并通过在线反馈校正来降低SMC控制系统的抖振,同时对主汽压控制器采取分步滚动优化骤,从而达到有效抑制主汽压控制系统扰动的目的。
1 主汽压控制系统构建
1.1 主汽压系统动态特性分析
对燃气发电锅炉燃烧系统的动态特性进行分析是设计主汽压控制系统的前提。由文献[13],锅炉燃烧系统的动态模型通常表示成
(1)
式中:y1、y2、y3分别是主汽压(MPa)、炉膛负压(Pa)和烟气含氧量;u1、u2、u3分别是燃气体积流量(m3/s)、送风流量(m3/s)和引风流量(m3/s)。
整个燃烧系统包含主汽压、空气过剩系数和炉膛负压共3个控制回路。系统输入变量是燃气体积流量、冷空气送风流量和烟气引风流量;输出变量分别是主汽压、空气过剩系数和炉膛负压。由于燃气量变化对主汽压的影响最为直接,所以一般采用燃气量作为主汽压系统的控制量[14]。
鉴于PID控制原理简单且工程应用广泛[15-16],因此在锅炉主汽压控制系统中常使用PID控制。主汽压控制器主要用来稳定主蒸汽压力,燃气供应控制器通过调节燃气流量间接达到稳定主汽压的目的。主汽压控制器的输出由燃气控制器跟踪。引入空燃比系数α,将α和燃气供应控制器输出相乘的结果作为送风量的设定值,以确保燃料充分燃烧,提高锅炉运行效率。炉膛负压则由烟气引风机控制在负压的设定值。主汽压变化主要是由燃气流量变化和主蒸汽流量变化引起的,在锅炉正常稳定运行条件下,主蒸汽流量变化很小,可以认为其是稳定的。因此,主汽压传递函数可以表示成一阶加时延过程模型
(2)
式中:K是比例系数;τ是延迟时间;T是时间常量。
1.2 主汽压控制方案设计

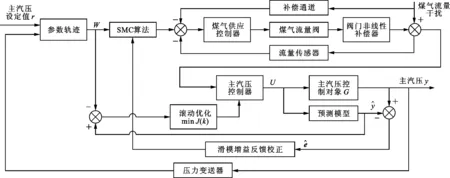
J(k)—k时刻滚动优化性能指标函数;U—控制器输出。图1 主汽压PSMC整体控制方案
煤气调节阀作为主汽压控制系统的执行器,其流量的非线性特性是造成主汽压系统非线性的主要原因。本文对采用的煤气电液数字调节阀的控制信号占空比进行非线性补偿,以改善调节阀流量的非线性特性,进一步提高主汽压控制系统的稳定性。电液数字调节阀的流量特性由死区、线性区和饱和区共3个部分组成,对死区和饱和区的控制信号占空比进行补偿,补偿公式分别为
(3)
(4)
式中:Tc为阀门控制信号周期;t1、t2、t3、t4分别为阀芯的吸合延迟时间、吸合运动时间、释放延迟时间、释放运动时间(ms);D为控制器输出的控制信号占空比;Dcom为补偿后的控制信号占空比。以HSV-3101S1型电液数字阀门为例进行计算,对应的阀门控制信号周期Tc为30 ms,对不同开度下的流量特性进行分析,得出参数t1、t2、t3、t4分别为1.5、1、1.5、1 ms。因此,基于死区、线性区和饱和区的分段补偿控制信号占空比为
(5)
2 滑模预测控制器设计
GPC控制的主汽压预测模型由阶跃响应数据建立,通过燃气发电锅炉运行现场的阶跃响应实验,可以得到主汽压采样值αi=α(iTp),i=1,2,…,N,其中Tp为采样周期,N为预测范围。根据线性系统叠加原理,k时刻对k+i时刻的主汽压输出预测值为
(6)
SMC控制器的设计步骤如下。
(1)滑模函数设计。根据系统主汽压设定值r(t)和输出测量值y(t)之间的偏差e(t)来定义滑模函数,得到
(7)

(2)控制律设计。控制律设计具体包含两部分:①当e(t)较小时,设计连续部分来控制主汽压系统;②当系统受干扰时,设计不连续部分,通过改变系统结构以维持主汽压稳定。连续部分使用等效滑模控制进行设计,等效滑模控制必须满足
(8)
将式(8)代入式(7),可得
(9)
由于e(t)=r(t)-y(t),所以式(9)可表示成
(10)
在微分域中用式(2)替换式(10),可得
(11)
因此,等效滑模控制律可表示成
(12)
由文献[17]可知,舍弃系统设定值的微分,不影响系统的控制性能,因此式(12)变为
(13)
同样,由文献[17]可知,η1最佳值取为
(14)
文献[18]已证明η2的最佳值为
(15)
因此,等效滑模控制律的离散形式表示为
(16)
(3)到达模式控制律设计。到达模式控制律设计用于改变系统结构,使位于滑模面之外的系统状态尽快到达滑模面上。本文采用GPC获得最佳预测增益Kp以取代到达模式控制律中的固定增益Ks,复合控制律表示为
(17)
式中:Ks与滑模运动到达滑模面的速度有关;调节β可以确保主汽压控制动作的平稳性。由文献[19]的时域性能方法可知,控制器的调节参数为
(18)
(19)
预测控制是基于离散系统的,因此将主汽压被控对象式(2)进行离散化,得到
(20)
式中:d1=e-Tp/T;n1=K(1-d1);d=τ/Tp。为计算方便,时延τ取整数且为Tp的整数倍。

(21)
基于Kp和sp的到达模式控制律表示为
(22)
式中kGPC是增益矩阵KGPC的首行。


(23)
KGPC为
(24)
k时刻滚动优化性能指标函数为
(25)
式中:W(k+j)为主汽压系统未来k+j时刻的设定参考值;λ为控制权重,表示对控制量变化Δu的抑制,引入λ可降低主汽压调节过程中的剧烈波动。性能指标J通过式(22)中的Kp达到最小值,此时主汽压预测值与设定参考值最接近。

W(k+d+1)-W(k)
(26)
将式(16)和式(26)相加,可得离散滑模预测控制律的完整表达式
UPSMC(k)=Ueq(k)+Ureach(k)
(27)
PSMC控制器共含5个调节参数,其中,η1、η2、β分别由式(14)(15)(19)给出,预测范围N和控制权重λ通常选择常数,且N越大,系统计算时间越长,而λ越大,系统响应越慢。考虑到控制器性能,N和λ取值不宜过大。
3 仿真分析
以某发电厂42 MW火电机组150 t燃气锅炉作为被控对象进行仿真研究,采用最小二乘辨识法对燃气锅炉主汽压模型参数进行辨识,辨识过程如图2所示。

L—辨识循环次数。图2 主汽压模型参数辨识流程
对燃气锅炉运行现场的3 600组高炉、转炉、焦炉煤气量和在3组煤气量下对应的主汽压数据进行剔除异值、平滑处理等预处理,作为参数辨识的输入数据和输出数据。辨识循环次数L为3 600,辨识精度ε为0.00 1。当系统辨识过程达到精度要求时,得到主汽压近似数学模型,其传递函数为
(28)
系统采样周期为1 ms,主汽压初始状态为1。将常规PID、SMC和动态矩阵控制(DMC)共3种控制方案与PSMC控制策略进行仿真对比。PID参数根据Ziegler-Nichols整定方法选取[20],PSMC中的广义预测参数N和λ以及DMC的参数均根据预测控制的一般参数选取规则进行选取,各控制器参数如表1所示,表中,DMC的参数H为模型长度,P为优化时域,M为控制时域,Q和R分别是误差权矩阵和控制权矩阵,对应的初始值分别取P维单位矩阵EP×P和0矩阵。
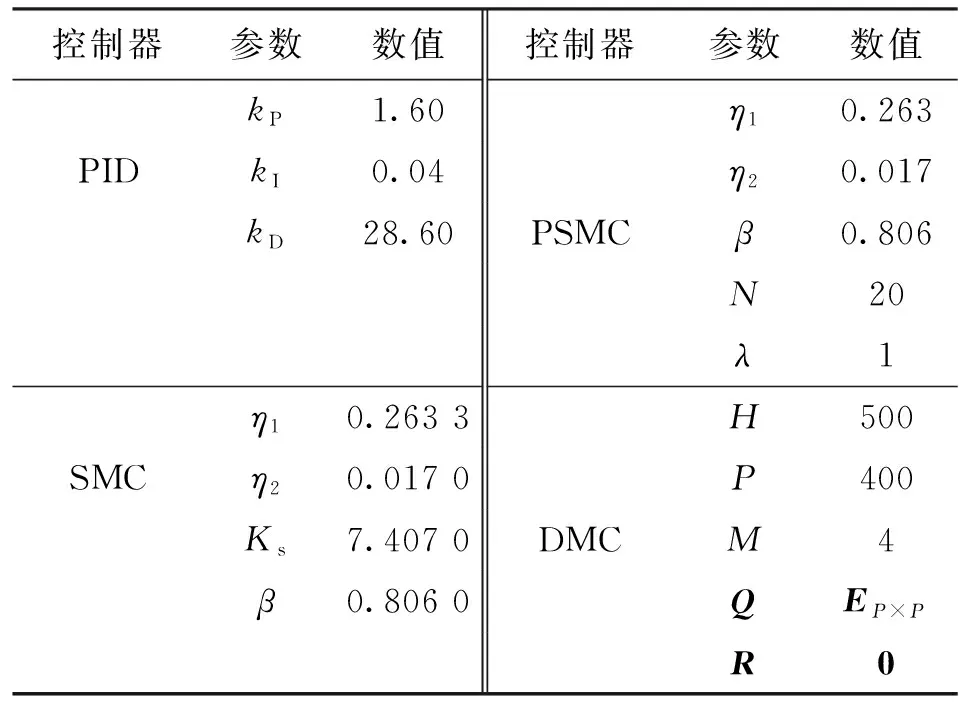
表1 燃气锅炉控制器参数
为验证PSMC控制策略的跟踪性能和抗干扰性能,向主汽压系统施加0.2sint的干扰信号,主汽压设定信号为r=sint。
(1)固定增益SMC控制仿真。采用式(17)的控制律,SMC控制的跟踪曲线及跟踪误差如图3所示。

图3 SMC控制的跟踪曲线及跟踪误差
(2)预测增益PSMC控制仿真。采用式(27)的控制律,PSMC控制的跟踪曲线及跟踪误差如图4所示,SMC和PSMC控制的对应滑模函数如图5所示。
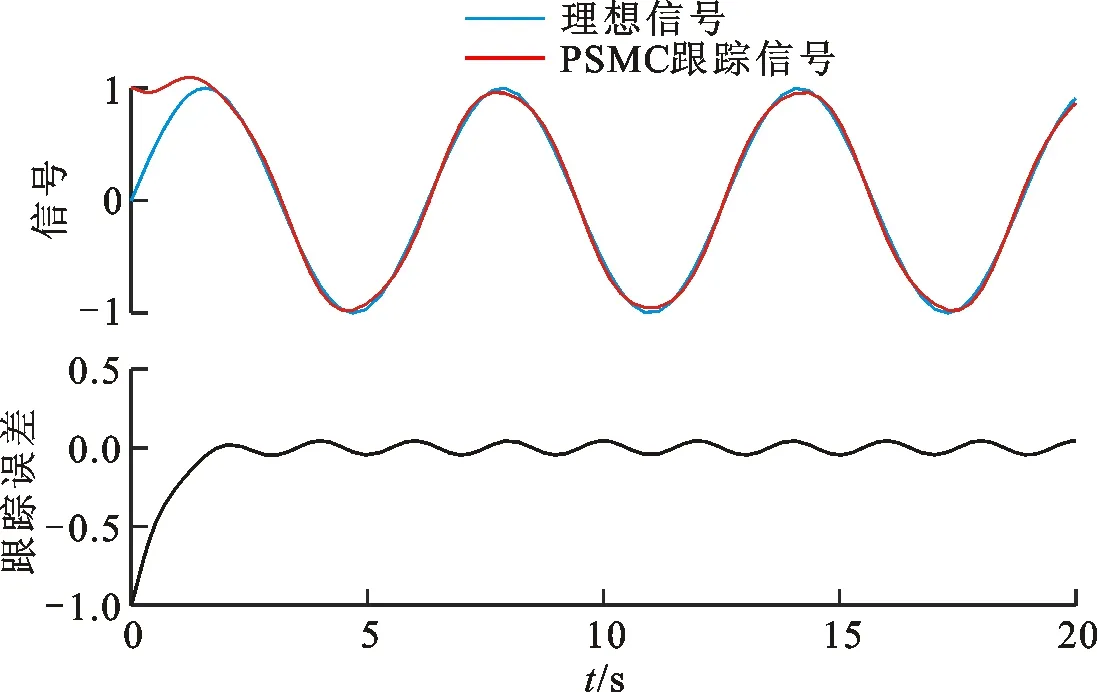
图4 PSMC控制跟踪曲线及跟踪误差

图5 SMC和PSMC控制的滑模函数
从图3和图4可以看出,在相同的正弦干扰信号下,采用SMC控制的跟综误差在±0.25之间,而采用PSMC控制的跟综误差在±0.05之间,PSMC较SMC控制的跟综性能和抗干扰性能较好。从图5可以看出,PSMC对SMC控制的固定增益进行了预测优化,滑模函数更加平坦,几乎无波动,系统抖振得到有效遏制。
(3)前馈和非线性补偿仿真比较。在PSMC控制策略下,对煤气扰动和煤气调节阀分别进行前馈及非线性补偿仿真对比,结果如图6所示。
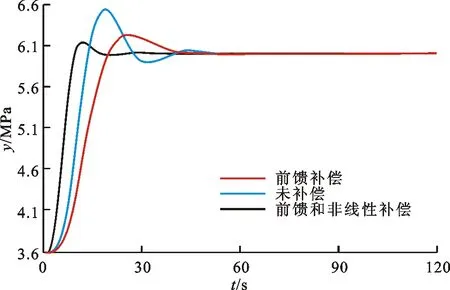
图6 PSMC下煤气扰动及调节阀的前馈和非线性补偿结果对比
从图6可以看出:未对煤气扰动和煤气调节阀进行补偿时的系统超调量为9.17%,主汽压调节过程中波动较大;对煤气扰动进行前馈补偿时的超调量为5.02%;对煤气扰动及煤气调节阀分别进行前馈和非线性补偿时的超调量分别为2.81%,主汽压波动得到有效抑制,系统稳定性显著提高。
(4)模型适配与失配仿真比较。在式(28)主汽压精确模型仿真的基础上,对K、τ和T均增大10%进行仿真,以此模拟模型失配情况下PSMC控制策略的鲁棒性,结果如图7、图8所示。从图7可以看出,在主汽压模型参数精确时:采用PSMC控制的超调量为5.1%,调节时间为39.3 s;采用SMC控制的超调量为15.3%,调节时间为40.2 s;采用DMC控制的超调量为18.2%,调节时间为43.4 s;采用常规PID控制时的超调量为21.5%,调节时间为58.4 s。从图8可以看出,在主汽压模型参数失配时:采用PSMC控制的超调量为5.8%,调节时间为40.4 s;采用SMC控制的超调量为18.9%,调节时间为42.1 s;采用DMC控制的超调量为17.5%,调节时间为40.8 s;采用常规PID控制的超调量为27.8%,调节时间为63.6 s。分析表明,PSMC控制策略在主汽压模型失配的工况下具有更强的鲁棒性。

图7 模型参数准确时4种控制策略的仿真
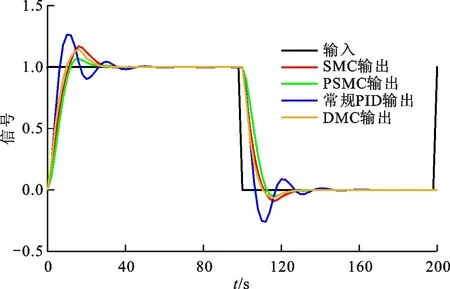
图8 模型参数不准确时4种控制策略的仿真
4 工程应用
为验证PSMC控制策略的有效性,以某发电厂42 MW火电机组150 t燃气发电锅炉主汽压为控制对象进行工程应用。在保持原有集散控制系统(DCS)配置不变的基础上,增加一套由工业控制计算机和优化控制器组成的锅炉主汽压优化控制系统。整个优化控制系统的拓扑结构如图9所示。本文设计的PSMC控制策略程序在CoDesys软件中编写,下载到PLC中运行。数据采集和传输通过Kepware进行,Kepware软件将DCS系统中的数据通过OPC服务器与CoDesys服务器中的数据进行交换,实现数据的共享。利用力控软件建立监控画面,读取CoDesys中的数据到组态画面中,并对数据的历史趋势进行保存,实现报表统计、考核、参数设置、手自动切换和语言报警等功能。

图9 主汽压优化控制系统
图10~12是在燃气锅炉额定负荷下连续3天分别采用常规PID控制、SMC控制和PSMC控制的主汽压实时曲线,主汽压设定值为6 MPa,每次监测时间为8小时。从图10~12可知:采用常规PID控制的主汽压在5.7~6.2 MPa之间波动,波动范围较大,这是因为常规PID控制系统存在惯性,无法及时抑制因煤气扰动带来的主汽压变化;采用SMC控制和PSMC控制的主汽压分别在5.85~6.1 MPa以及5.95~6.05 MPa之间波动;相较SMC控制,PSMC控制的系统抖振降低了60%,主汽压曲线没有出现明显的波峰和波谷,整体走势平稳,系统稳定性和抗干扰能力明显提高。
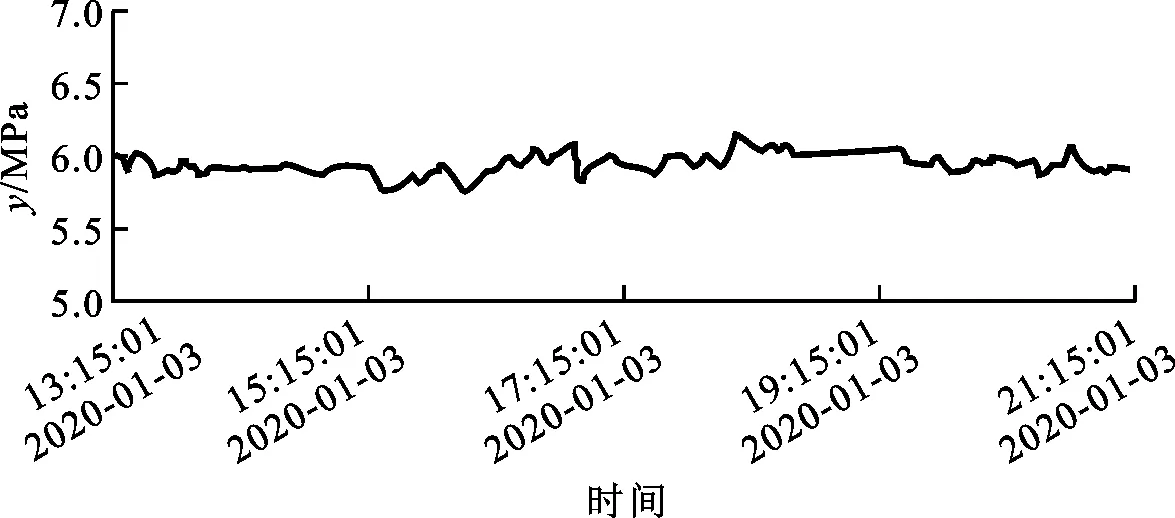
图10 PID控制的主汽压实时曲线

图11 SMC控制的主汽压实时曲线

图12 PSMC控制的主汽压实时曲线
5 结 论
燃气发电锅炉主汽压控制系统具有非线性、纯滞后的特点,且机组运行时受现场扰动大,被控对象模型参数易变。鉴于常规控制方法无法达到理想的控制效果,本文提出了一种PSMC的主汽压优化控制策略,采用GPC预测SMC的增益并在线校正更新,在此基础上对主汽压控制器进行滚动优化,进一步提高控制器的控制性能。仿真结果表明,本文PSMC控制策略跟踪性能良好、抗干扰能力强,在主汽压超调量和调节时间等性能指标方面均优于常规PID、SMC和DMC控制的,具有更强的鲁棒性。工程应用表明,采用本文PSMC控制策略后,系统抖振比单一SMC控制的降低60%,主汽压的控制偏差在±0.05 MPa以内,有效提高了发电机组运行的安全性和主汽压控制系统的稳定性。
本文提出的PSMC控制策略对于其他燃煤或燃油发电锅炉的主汽压控制应具有一定的借鉴意义。
猜你喜欢
江苏安全生产(2023年9期)2023-10-24 05:59:30
环球时报(2023-02-09)2023-02-09 17:16:43
山东冶金(2022年4期)2022-09-14 08:59:30
煤气与热力(2022年4期)2022-05-23 12:45:00
大众投资指南(2021年23期)2021-12-06 05:46:46
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
小学生作文选刊·低年级版(2014年8期)2014-08-19 00:51:31
河南科技(2014年7期)2014-02-27 14:11:17
