复杂施工条件下无人碾压机群协同全覆盖路径规划研究
2021-01-28 05:39:42时梦楠王佳俊佟大威任炳昱
水利学报 2020年12期
时梦楠,崔 博,王佳俊,关 涛,佟大威,任炳昱
(天津大学水利工程仿真与安全国家重点实验室,天津 300350)
1 研究背景
坝料压实是碾压式大坝填筑中的关键工序。我国大坝建设正逐渐向高海拔、高地震烈度、偏远地区转移,高寒、缺氧的恶劣施工条件下,施工人员降效,给大坝碾压施工管理带来了巨大挑战[1]。无人碾压是当前大坝碾压施工最先进的技术之一,该技术有助于消除人为因素对碾压施工的不利影响,进一步提升碾压施工精度。路径规划是无人碾压技术中重要的研究内容,已有的大坝无人碾压机路径规划主要是针对不包含障碍物的规则矩形边界作业面的路径规划[2]。大坝施工条件复杂,坝面面积大、料区多(如心墙堆石坝存在堆石区、过渡区和心墙区等)、障碍物多(如不规则岸坡、指定位置埋设的变形监测仪器、料堆等静态障碍物和施工机械、施工人员等动态障碍物),且碾压任务有赖于多机型碾压机群协作完成。同时,为了保证碾压质量,碾压施工机械需要按照指定的工艺对作业面进行碾压[3];为了保证碾压进度,大坝坝面碾压需要在给定的施工环境和施工资源条件下高效率完成碾压作业,以免影响后续施工环节[4]。因此,开展复杂大坝碾压施工条件下满足碾压工艺的无人碾压机群高效协同作业路径规划研究,对于保证大坝无人碾压机群的碾压质量和提高大坝无人碾压机群的碾压效率具有重要意义。
坝料压实过程中,为保证大坝碾压质量,无人碾压机需要避开障碍物并对作业面进行遍历碾压,既不超碾也不漏碾。因此,大坝无人碾压机路径规划隶属于全覆盖路径规划研究范畴(Complete Coverage Path Planning,CCP)[5]。已有全覆盖路径规划(CCP)研究主要集中在无人水下航行器、无人农业机器人等领域[6-8],多机协同全覆盖路径规划是当前研究的热点[9]。多机协同全覆盖路径规划是指多机在一定的环境下均衡规划作业路径,通过多机协作共同完成全覆盖作业任务[10]。相较于单机作业,多机协同作业有利于在有限的资源条件下高效地完成复杂的作业任务。为实现大坝无人碾压机群复杂施工条件下的协同全覆盖路径规划,采用首先进行大坝施工作业面全覆盖路径规划(包括作业面分解、子作业面规划和子作业面连通等步骤),其后进行无人碾压机群的协同作业任务分配的思路。作业面分解用于将存在静态障碍物(如:不规则岸坡、埋设的变形监测仪器、料堆等)的不规则作业面拆分为无障碍物的子作业面,以实现对复杂作业面的拆分;子作业面是最小的作业单元,对其进行满足复杂施工工艺的碾压路径规划,以满足碾压质量需求;子作业面连通用于优化出绕开静态障碍物的多个子作业面之间的转场路径;最后,通过机群任务分配,将规划出的作业面全覆盖路径分配到各台无人碾压机,无人碾压机在作业过程中通过机载雷达实时检测动态障碍物(如:施工机械和施工人员等),并采取停车等待的方式进行自动避障。最终,通过以上步骤实现复杂施工条件下无人碾压机群对作业面的协同全覆盖。
在大坝施工作业面全覆盖路径规划方法方面:Trapezoidal 算法和Boustrophedon 算法是全覆盖路径规划领域两种主流的作业面分解算法[5]。Boustrophedon算法将区域分为入口和出口,可以有效减少多障碍物条件下的子作业面个数,有利于减少规划路径长度。因此,可采用Boustrophedon算法对大坝碾压作业面进行分解;为保证碾压质量,已有研究通过构造符合施工工艺的碾压运动模型来进行子作业面路径规划,如Yao[12]基于道路碾压工艺构建循环往复式路径模型进行作业区域规划以满足道路碾压需求。然而,不同于道路碾压,大坝碾压包括坝轴线方向的进退碾压和错距等环节,与此同时大坝坝面各料区的碾压参数也各不相同,本研究基于搭接法和错距法碾压工艺原理,构建一种碾压运动模型,可以满足大坝坝面各料区的碾压工艺需求;子区域的连通路径规划隶属于旅行商问题(Traveling Salesman Problem,TSP),即求解遍历各城市节点的最短路径,国内外研究中多采用启发式算法进行求解[13]。蜻蜓算法是一种新型群智能算法,被广泛应用于求解工程设计、数据挖掘及人工智能领域的优化问题[14]。传统的蜻蜓算法存在收敛速度慢、易陷入局部最优等问题[15],而混沌搜索的遍历性与随机性等特点有利于增强群智能算法的全局搜索能力[16],因此,采用基于混沌优化理论改进蜻蜓算法对子作业面的连通路径进行计算,以提高传统蜻蜓算法的优化速度和精度,进而缩短连通路径长度。通过以上步骤可实现复杂施工条件下的无人碾压机群全覆盖路径规划。
在无人碾压机群的协同作业任务分配方法方面:针对大坝碾压具有施工效率要求高的特点,无人碾压机群任务分配以均衡机群任务、高效完成碾压为目标。碾压施工过程中,无人碾压机的运行阶段包括转场、错距和碾压等,不同的阶段作业速度各不相同。已有机群任务分配研究按总路径长度或作业面积对多机路径进行任务分配[9-11],无法均衡无人碾压机群的作业任务,存在资源闲置、无法最大化发挥无人碾压机群作业效率的缺点。因此,通过综合考虑无人碾压机转场、错距和碾压等环节的作业成本,构建无人碾压机群作业时间成本函数,并以机群作业时间最短为准则将全覆盖路径分配至各台无人碾压机,实现无人碾压机群的高效协同作业任务分配。
综上所述,本文克服已有研究无法满足大坝坝面机群协同作业、障碍物多、碾压工艺复杂和施工效率要求高等复杂施工条件下作业需求的不足,提出一种无人碾压机群协同全覆盖路径规划的新方法,重点解决大坝复杂施工条件下路径规划过程中安全避障、保证碾压工艺、优化路径长度和提高机群协同作业效率等全覆盖路径规划问题。开展了仿真实验和工程应用,证明所提出方法的有效性和先进性。
2 研究框架
紧密围绕大坝坝面无人碾压机群高效协同全覆盖路径规划问题开展研究,主要包括方法层、对比分析层和工程应用层,研究框架如图1所示。
(1)方法层:提出一种复杂施工条件下无人碾压机群路径规划方法,包括作业面分解、子作业面规划、子作业面连通和机群任务分配等步骤。首先,采用Boustrophedon算法将其拆分成较少的无障碍物子作业面;其次,提出满足基于搭接法和错距法碾压施工原理的碾压运动模型来进行子作业面路径规划,从而保证碾压工艺;再者,将各子作业面连通施工顺序优化问题建模为TSP模型,采用混沌理论改进蜻蜓算法的搜索机制,构建混沌蜻蜓算法,以求解较优的子作业面间转场路径;最后,建立无人碾压机群作业时间成本函数,并以最小化时间成本为准则将全覆盖路径分配至各无人碾压机,无人碾压机在作业过程中通过机载雷达实时检测动态障碍物,并采取停车等待的方式进行自动避障。最终,通过以上步骤实现复杂施工条件下无人碾压机群对作业面的协同全覆盖。
(2)对比分析层:对所提出的路径规划方法进行仿真验证和算法对比,验证所提出方法的有效性和先进性。
(3)工程应用:在西南某心墙堆石坝施工现场构建了无人碾压机群系统,并将所提出的方法嵌入系统中进行工程应用,对作业过程和作业报告进行分析。

图1 研究框架
3 大坝无人碾压机群协同全覆盖路径规划方法
3.1 基于Boustrophedon 算法的作业面分解针对大坝坝面障碍物多和作业面边界不规则的复杂特点,为保障无人碾压机的安全避障作业,采用区域分解算法将包含障碍物的作业面分解成无障碍物的子作业区域。Trapezoidal 算法和Boustrophedon 算法是全覆盖路径规划领域两种主流的区域分解算法[5]。Trapezoidal法原理可参见文献[5],该方法分解得到的子区域如图2(a)所示。采用Boustrophedon分解法进行作业面的分解,该方法依据挡板与障碍物交互情况,将单元分成三种状态并进行拆分:(1)In,表示当前单元的结束,并且会出现两个新的单元;(2)Out,即两个单元的结束,进入了一个新的单元中;(3)Middle,代表的是当前的单元结束,新单元将会出现。该方法优势在于拆分所得的子作业面个数较少,有利于缩短无人碾压机在子作业面间转场的路径,如图2(b)所示。

图2 作业面分解方法
3.2 基于碾压运动模型(CMM)的子作业面路径规划针对目前无人碾压路径规划没有考虑大坝各料区复杂碾压工艺差异的问题,本研究基于搭接法和错距法原理[3],提出一种应用于大坝各料区的碾压运动模型(CMM,Compaction Motion Model)。基于该模型,通过输入施工参数,可实现各料区子作业面均满足指定遍数、搭接、错距等碾压工艺的路径规划。
根据搭接法和错距法碾压施工规范,碾压机运行过程中有两种运动模式,第一种运动模式为在条带上行进往复碾压作业,如图3(a)所示在A0和B0之间进行指定遍数的往复碾压;第二种运动模式为条带错距,如图3(b)所示通过平滑曲线从C0移动到B1,进而从第一条带错距到第二条带。
碾压作业路径规划环节中,设计碾压条带线型为平行于坝轴线的直线,如图3(a)中的线段A0B0和A1B1等。图中Point1、Point2、Point3和Point4为子作业面边界点,为简化计算,将Point4定为坐标原点,根据待碾仓面参数计算子作业面内第n个碾压条带路径公式如下:


图3 碾压运动模型
条带错距路径规划环节中,已知无人碾压机最小转弯半径R(m)可基于规划出的往复碾压作业路径计算得到条带错距路径。如图3(b)所示,B0为第一条往复碾压作业路径的终点,B1为第二条往复碾压作业路径的起点,碾压机由B0前进至C0后,沿着两段圆弧(O1和O2分别是两段圆弧各自的圆心,半径为最小转弯半径R最终运行到B1并将车身回正,从而实现条带错距。条带错距路径计算公式如下(以图3(b)所示条带的错距路径规划为例)。
C0点到B1点的条带错距路径:

式中:x为错距路径的x轴坐标值,m;y为错距路径的y轴坐标值,m;B0x为B0点的x坐标,m;B1x为B1点的x坐标,m。
以上步骤构建了子作业面的碾压运动模型。无人碾压机在碾压作业过程中,根据所设定的碾压遍数在碾压条带上进行往复碾压作业,条带碾压完成后沿着错距路径移动到下一条带进行作业,最终实现子作业面满足碾压工艺的全覆盖。除此之外,所提出的碾压运动模型能够满足大坝各料区的碾压工艺,具体为:通过调节碾压运动模型中的搭接宽度W(m),可满足不同料区搭接法和错距法的施工工艺需求;通过调节碾压运动模型中的遍数n,可满足各坝料的碾压质量需求。
3.3 基于混沌蜻蜓算法的转场路径TSP模型优化针对子作业面之间的转场轨迹优化问题,将子作业面连通问题建模为TSP模型,并采用混沌蜻蜓算法对模型进行求解,最终得到优化了的转场路径。
仓面拆分后作业面被分解成多个子作业面,无人碾压机需遍历所有子作业面,既不超碾也不漏碾,最终实现全作业面的遍历。如图4(a)所示,需规划出遍历子作业面1、2、3和4的最短路径,即子作业面之间的转场路径。本文将转场路径优化建模为旅行商问题[13],将图4(a)中的各子作业面(子作业面1、子作业面2、子作业面3和子作业面4)定义为图4(a)中的城市节点,并将子作业面间的连通路径长度(如图4(a)中由子作业面1出发到子作业面4的路径Path(1->4))定义为城市节点间的路径长度,寻找遍历各城市节点的序列,以使得总路径长度最短。
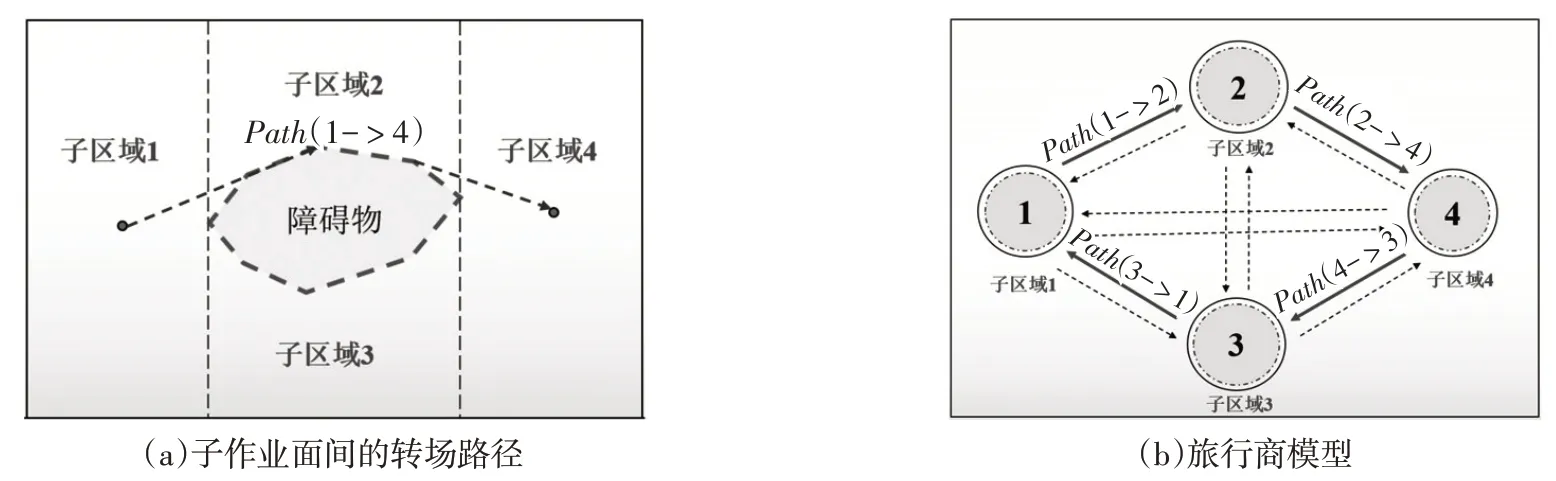
图4 转场路径规划示意图
旅行商问题一般采用群智能算法进行优化求解[13]。蜻蜓算法(Dragonfly Algorithm,DA)是由Seyedali Mirjalili 在2015年提出的一种新型群智能优化算法,详细算法流程可参考文献[14]。虽然蜻蜓算法对于函数优化问题表现出不俗的性能,但仍存在着全局搜索能力差、早熟收敛、求解精度不高的缺点[15]。混沌是非线性系统所特有的一种非周期现象,混沌搜索的遍历性与随机性等特点有利于增强群智能算法全局搜索能力[16-17]。因此,本研究采用混沌优化来改进传统蜻蜓算法,并将改进的蜻蜓算法应用于子作业面转场路径优化。混沌优化在传统蜻蜓算法每次更新蜻蜓位置后生效,主要步骤为:首先,将蜻蜓位置向量序列转化为混沌搜索空间内的混沌变量;其次,通过混沌变量进行遍历性寻优搜索得到混沌序列;最后,将遍历到的混沌序列转回蜻蜓向量序列进行适应度评估,若此次混沌搜索后得到了更优的蜻蜓个体,则更新混沌搜索前的蜻蜓个体。
(1)将每个蜻蜓个体映射到混沌空间(-1,1)中:

式中:i为蜻蜓个体编号;j为搜索空间维数编号;N为蜻蜓的个体数;M为搜索空间维数;x为原蜻蜓向量序列;和分别为第j维蜻蜓向量序列的最小和最大值;y为混沌变量。
(2)采用具有更好遍历性的逻辑自映射函数[16]产生混沌序列:

逻辑自映射函数的定义域为(-1,1)且不为0和0.5,在逻辑定义域内混沌生效。
(3)在通过混沌搜索得到混沌变量序列后,需要将混沌遍历序列按照下式变换到原来的解空间中进行适应度值评估:

(4)基于新遍历序列,采用求解效率高且路径较短的可视图法(Visibility Graph Algorithms)[18]规划出避开障碍物的两点间路径,并将路径总长度作为适应度值,以适应度越小为优解。若搜索到更优的解,则用更优的蜻蜓向量序列代替原本的蜻蜓向量序列。
旅行商问题是离散空间的非数值优化问题,在运用改进蜻蜓算法求解旅行商问题时需要在连续空间的粒子与离散空间的路径解之间建立对应关系。改进蜻蜓算法的离散化步骤包括:运用n个随机键编码进行快速排序得到每个随机键位置的大小顺序;用n个位置值表示每个城市的位置矢量,随机键位大小顺序对应城市经过顺序。
综上所述,改进蜻蜓算法求解无人碾压机在各子区域之间转场路径的旅行商问题流程如图5。无人碾压机群按求解得到的路径进行子区域间转场可减少作业路径长度,降低作业时间。

图5 混沌蜻蜓算法规划转场路径流程图
3.4 基于时间成本的机群任务分配针对无人碾压机群的高效协同作业任务分配问题,提出基于时间成本的机群任务分配方法,充分发挥无人碾压机群的集群效率优势。
碾压施工过程中,无人碾压机的运行包括转场、错距和碾压等环节,不同的环节作业速度各不相同。采用构建无人碾压机群作业时间成本函数,以机群作业时间最短为准则进行无人碾压机群任务分配的方法,将作业任务均衡分配给无人碾压机群,以提高作业效率。
无人碾压机群任务分配准则为:

式中:N为无人碾压机个数;n为无人碾压机编号;T为无人碾压机群仓面作业时间,h;T(n)为第n台无人碾压机的作业时间,h;W(n)为第n台无人碾压机作业路径,m;W为全覆盖总路径,m;x为混沌蜻蜓算法优化求解得到的遍历顺序序列;X为序列节点个数;nx(i)为x序列中第i个节点编号所对应的子作业面碾压条带个数;CPath(i,j)为第i个子作业面第j条碾压路径,m;ZPath(i,j)为第i个子作业面第j条错距路径,m;RPath(i)为第i条转场路径,m;S(n)为第n个无人碾压机作业路径起点;E(n)为第n个无人碾压机作业路径终点。
其中,作业时间成本计算公式如下:

式中:TR为碾压时间成本,h;TC为错距时间成本,h;TZ为转场时间成本,h;Vz为转场车速,km/h;Vr为碾压车速,km/h;Vc为错距车速,km/h;CPath为碾压路径集;ZPath为错距路径集;RPath转场路径集。
4 对比分析
为了验证本研究所提出路径规划新方法的有效性和先进性,基于一个模拟的测试作业面进行路径规划方法的仿真验证和方法对比,该测试作业面包含了可能出现的复杂施工场景。首先进行Boustrophedon 和Trapezoidal 复杂作业面分解方法的对比;其次进行基于碾压运动模型的子作业区域路径规划方法满足多料区碾压工艺验证;再者进行混沌蜻蜓算法子区域连通方法与引力搜索算法、萤火虫算法、粒子群算法、遗传算法等的对比;最后进行基于时间成本任务分配方法与等面积分配方法和等路径长度分配方法的对比。
为模拟坝面边缘的不规则岸坡,将测试作业面设置为不规则多边形作业面;为模拟指定位置埋设的不规则监测仪器和料堆等静态障碍物,在作业面内设置5个不规则多边形障碍物;无人碾压机作业过程中采取停车等待的方式自动避开动态障碍物,在路径规划阶段不设置动态障碍物。测试作业面信息见图6,碾压施工参数见表1。

表1 施工参数

图6 测试作业仓面

图7 基于时间成本的无人碾压机群任务分配
4.1 复杂作业面分解方法对比针对所给作业面分别采用Trapezoidal 分解法和Boustrophedon算法进行子作业面拆分。其中Trapezoidal 分解法在挡板经过障碍物边界点时产生新单元,最终拆分得到43个子作业面,如图8(a)。Boustrophedon算法基于状态的转变生成新单元,最终拆分得到18个子作业面,如图8(b)。通过对比,表明本文进行作业面拆分所采用的Boustrophedon 算法相较于Trapezoidal分解法拆分得到的子作业面更少。

图8 子区域拆分结果
4.2 子作业面复杂碾压工艺验证针对Boustrophedon法拆分作业面得到的18个子作业面,采用本文所提出的碾压运动模型进行子作业区域路径规划,首先生成满足表1参数的无人碾压机碾压作业和错距路径,如图9,其中每个碾压路径往复作业8遍。为验证所提出的算法是否能满足错距法的施工工艺,将表1 中的工艺参数改为错距0.4 m,将遍数改为10 遍,生成的无人碾压机碾压作业和错距路径,如图9右侧所示的错距法轨迹图,其中每个碾压路径往复作业2遍。证明所提出的方法能够满足搭接法和错距法的施工工艺,从而满足大坝坝面多料区碾压工艺需求。
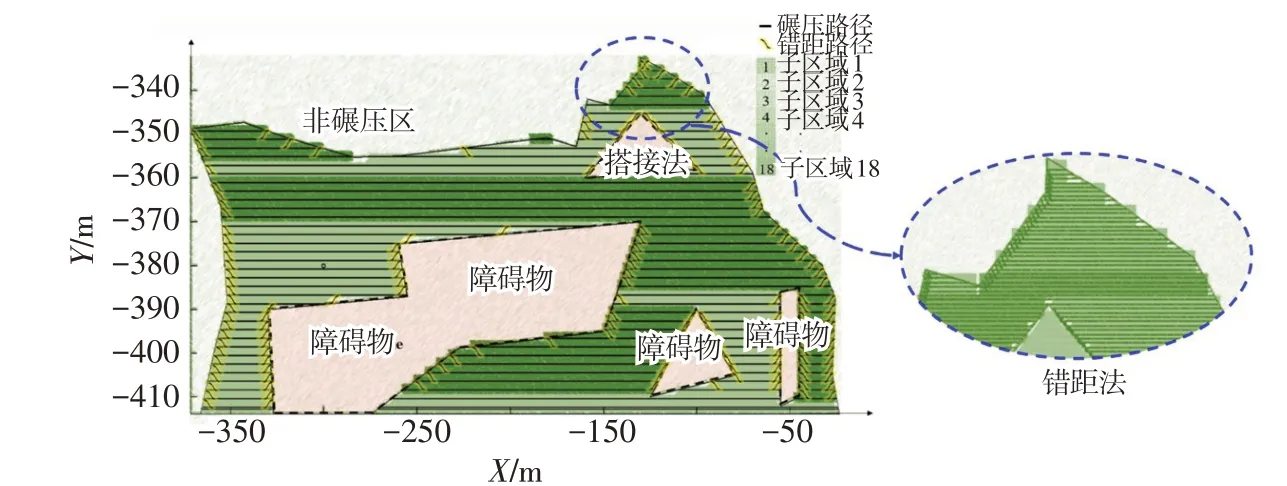
图9 子作业区域路径规划
4.3 子作业面连通优化算法对比将子作业面之间的转场连通问题采用改进的蜻蜓算法进行优化求解,蜻蜓个数设置为50,迭代次数设置为200。最终将子区域间的转场路径长度由784.6 m(如图10(a),转场顺序编号为:1、10、16、14、18、5、4、9、3、7、11、2、8、13、17、15、12、6),通过98 次迭代优化为233.4 m(如图10(b),转场顺序编号为:1、2、6、7、4、3、5、11、17、15、13、16、18、14、12、10、9、8)。与此同时,为证明算法的有效性与优势,以改进蜻蜓算法和传统蜻蜓算法及常用的寻优策略如引力搜索算法[19]、萤火虫算法[20]、粒子群算法[21]、遗传算法[22]进行对比。实验设置的种群数量均为50,最大迭代次数均为200次,其他算法额外的实验参数均采用文献中提供的进行设置,各算法收敛曲线如图11所示。
从图11能够看出,相对于其他算法,提出的改进蜻蜓算法在第6次迭代时,路径长度能优化为561.2 m,传统蜻蜓算法、引力搜索算法、萤火虫算法、粒子群算法和遗传算法分别需要40 次、39次、42次、40次和41次才能达到同等水平。之后,改进蜻蜓算法迎来第一次收敛,在第32次跳出局部最优,再通过27 次迭代收敛到317.8 m。改进蜻蜓算法在63 次再次调出局部最优的算法继续优化,最终在第98次迭代中优化到233.4 m的路径长度。其他算法在65次到80次之间达到收敛,最终优化停止在300.0 m附近。由此可见,提出的改进蜻蜓算法具有更快的收敛速度,且能够跳出局部最优得到更高的收敛精度,因而该算法能够用来进行子区域转场路径规划。
4.4 任务分配方法对比采用本研究构建的时间成本函数和任务分配方法,将路径按时间成本等量分配4台碾压机,与等面积分配和等路径分配方法的对比结果见表2。从表2可知,时间成本拆分方法相较于等面积拆分的5.73 h和等路径长度拆分的5.67 h能够得到5.38 h的最短作业时长,表明所提出的基于时间成本的任务分配方法更有利于减小设备闲置,提高施工效率。基于时间成本的无人碾压机群任务分配结果见图7。

图10 子区域连通优化

图11 子区域连通算法对比
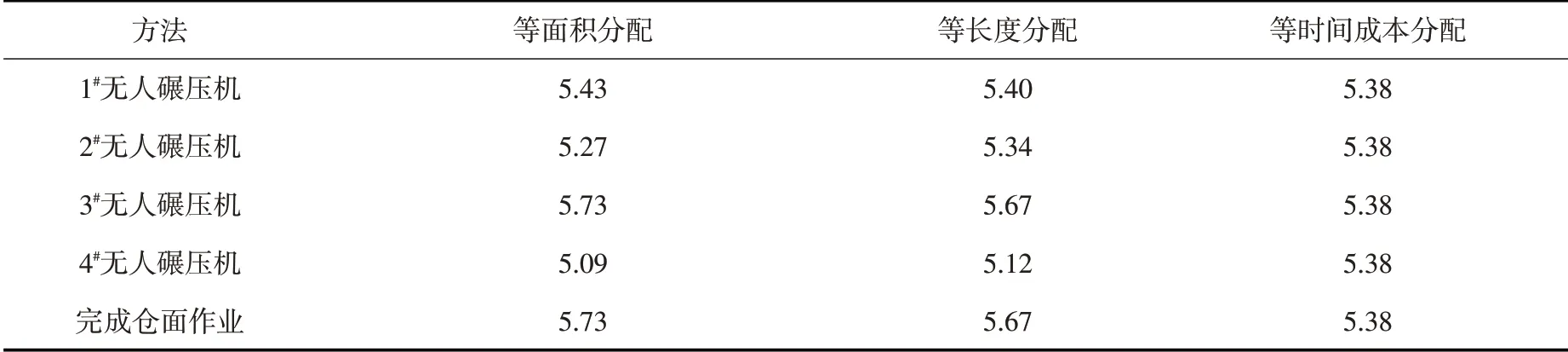
表2 机群作业时长对比 (单位:h)
采用无人碾压机群协同作业路径规划方法最终规划出复杂施工条件下各台无人碾压机满足碾压工艺的高效协同全覆盖路径。1#无人碾压机的作业路径如图12(a),2#无人碾压机的作业路径如图12(b),3#无人碾压机的作业路径如图12(c),4#无人碾压机的作业路径如图12(d),各台无人碾压机在各自任务区域内按照规划路径进行作业。以1#无人碾压机为例,任务区域内包含8个子作业区域,如图12(a)。1#无人碾压机首先在子作业区域1的碾压条带上往复碾压直至满足指定遍数;之后按照错距路径移动到下一条带;当子区域的条带全部碾压完成后,按照1、2、6、7、4、3、5、11的转场序号顺序,依次移动到下一子区域继续作业。基于时间成本等量分配准则,最终各台无人碾压机同时完成碾压,实现无人碾压机群对作业面的协同全覆盖。
5 工程应用
以中国西南某大型砾石土心墙堆石坝为例进行应用研究。坝料主要包括:堆石料、过渡料和心墙砾石土。为满足多种坝料的碾压作业,在工程现场对过渡料碾压机、堆石料碾压机和心墙砾石土共15台碾压机加装无人碾压机机载模块,构建了应用于工程现场全坝料的无人碾压机群。同时,在总控中心布置了通信链路和服务器,实现无人碾压机群的双向通信,并通过设置远程指挥模块实现无人碾压机群的实时监控、任务规划和指令下发[23]。
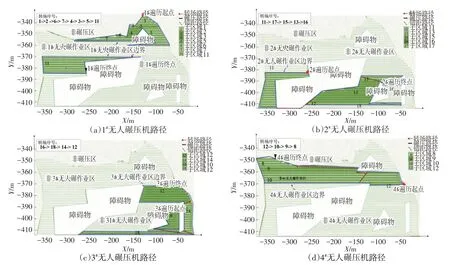
图12 无人碾压机群作业路径
以某一时刻坝面碾压为例,将8台无人碾压机投入现场生产。首先,由施工管理人员向系统下发指定区域的作业任务。其次,由施工管理人员操作系统根据作业任务,分别在上游堆石区、心墙区和下游过渡区输入作业参数对无人碾压机群进行路径规划,如图13所示。再者,施工管理人员指挥系统将作业指令通过数据链路下发至各无人碾压机。
无人碾压机群协同全覆盖作业过程如下:(1)各料区各台无人碾压机接收相应任务路径;(2)各台无人碾压机在各自任务区域内按照规划路径进行作业。其中上游堆石区和下游过渡区采用搭接法进行作业,心墙区采用错距法进行作业,作业过程如图14所示;(3)各台无人碾压机完成碾压作业,分别实现对上游堆石区、心墙区和下游过渡区作业面的协同全覆盖。作业完成后,施工管理人员通过系统生成质量和作业时间报告进行验收,如图15和图16所示。

图13 无人碾压机群协同全覆盖作业路径
在避开障碍物方面,由图13和图14可见,各作业面规划出的作业路径都能在不规则边界内绕开静态障碍物。指令下发后,各台无人碾压机能够精确按照规划路径进行绕开静态障碍物的安全作业,如图14(e)。作业过程中,无人碾压机能够基于机载障碍物检测装置,采取停车等待的策略,实现动态障碍物的自动避障,如图14(d)。
在碾压质量方面,通过分析作业完成后系统生成的遍数图形报告(如图15),发现堆石料仓面碾压达标率95.59%大于90%的标准值;过渡料仓面碾压达标率96.34%大于95%的标准值;心墙砾石土仓面,碾压达标率96.75%,大于95%的标准值。所提出的路径规划方法可以实现满足坝面多料区碾压的碾压工艺需求。

图14 无人碾压机群全覆盖作业过程图

图15 碾压遍数报告
在碾压效率方面,无人碾压机的车速控制存在不确定性,难以同时完成按时间成本等量分配的作业任务,最终作业时长如图16 所示。其中堆石区两台无人碾压机平均作业时长占总时长的99.06%;心墙区四台无人碾压机平均作业时长占总时长的97.58%;过渡区两台无人碾压机平均作业时长占总时长的97.83%。数据表明,所提出的机群路径规划方法能够均衡机群中各台无人碾压机的作业时间成本,设备利用率高,有利于在有限施工资源的条件下提高碾压效率。通过优化无人碾压机横纵向控制精度可进一步提升无人碾压机群的作业效率。

图16 无人碾压机作业时长统计图
6 结论
针对大坝具有坝面面积大、料区多、障碍物多等复杂施工特点,提出了一种无人碾压机群协同全覆盖路径规划新方法。首先对于子作业面拆分问题,采用Boustrophedon算法将包含障碍物的作业面拆分成无障碍物的子作业面;之后对于子作业面规划问题,基于碾压工艺构建碾压运动模型对子作业面进行路径规划;其次对于子作业面连通问题,采用改进的蜻蜓算法进行转场路径优化求解;最后对于任务分配问题,建立无人碾压机群作业时间成本函数,以最小化时间成本为准则将作业路径分配至各无人碾压机。
通过仿真对比分析,表明Boustrophedon 算法相较于Trapezoidal 分解法能够得到更少的子作业区域;碾压运动模型能够满足大坝坝面各料区碾压工艺的需求;改进蜻蜓算法相较于引力搜索算法、萤火虫算法、粒子群算法、遗传算法等能具有更快的收敛速度、能够跳出局部最优,并得到更短的作业路径;时间成本任务分配方法相较于面积和路径长度分配方法有利于提高设备利用率,进而提高碾压效率。
通过工程应用,表明所提出的路径规划方法能够进行大坝坝面各料区的无人碾压机群协同全覆盖路径规划,作业过程中无人碾压机群能够自动安全避障、满足大坝坝面多料区碾压工艺并保障碾压效率,最终实现复杂施工条件下无人碾压机群对大坝施工作业面的高效协同全覆盖。
本研究采用的无人碾压机群协同全覆盖路径规划研究思路对于无人碾压机路径规划研究具有重要的借鉴意义,同时在未来的研究中,应开展考虑施工不确定性的路径规划方面的研究。
猜你喜欢
学习与科普(2019年30期)2019-09-10 03:50:26
智富时代(2018年7期)2018-09-03 03:47:26
新教育时代电子杂志(教师版)(2018年29期)2018-02-25 01:59:59
小天使·一年级语数英综合(2017年9期)2017-10-20 21:05:00
科技资讯(2017年18期)2017-07-19 09:58:51
小学生导刊(低年级)(2017年1期)2017-06-12 21:43:46
阅读与作文(小学高年级版)(2016年5期)2016-05-10 23:35:24
现代计算机(2016年11期)2016-02-28 18:35:14
科技资讯(2015年5期)2016-01-14 17:18:34
武汉理工大学学报(交通科学与工程版)(2014年1期)2014-01-18 02:53:04