CGDS近钻头地质导向钻井系统搭载伽马成像技术
2021-01-26 08:59潘兴明张海波李明印
石油矿场机械 2021年1期
潘兴明,张海波,石 倩,王 晨,李明印
(1.中国石油工程技术研究院有限公司 北京石油机械有限公司,北京 102206;2.中国石油勘探开发研究院,北京 100083)
CGDS近钻头地质导向钻井系统是中石油自主研发的具备测量钻头电阻率,方位电阻率,方位伽马等近钻头地质参数的地质导向工具,其方位电阻率和方位伽马传感器呈圆周180°布置,可以通过摆动工具面实现具有方位性的地层电阻率和伽马测量[1]。但是,随着近年来钻井提速及页岩气水平井大规模开发,各大油田对近钻头方位伽马成像技术的需求日益迫切。目前,国外三大油服公司都已掌握该项高端技术且对国内实施技术封锁,国内目前还未出现成熟的近钻头伽马成像产品规模化应用。
CGDS经历约10 a的产业化过程,已经完成稳定性、可靠性优化改进,现已具备成本低,续航时间长等优点。为响应油田现场需求,CGDS项目团队着手立项研发近钻头伽马成像技术。CGDS前期产业化过程中,项目团队通过优选电路元器件,实现电路系统小型化集成设计,将CGDS原电路系统多块电路板集成为1块电路板,从而在短节舱体上释放了2个仓槽空间,为下一步搭载伽马成像电路创造了空间。
1 近钻头伽马成像技术国内外研究简况
1.1 国外近钻头伽马成像仪器
国外各大油服公司在近钻头伽马成像技术方面处于领先水平,他们研发制造的近钻头伽马成像仪器已经实现规模化应用。例如Schlumberger公司的IPzig,Baker Hughes公司的ZoneTrak,Halliburton公司的GABI都是出色的近钻头伽马成像导向仪器。这些仪器的共同优势在于传感器距离钻头非常近,使得伽马探测器测量得到的数据相较于钻头处真实数据滞后时间大幅减少;在近钻头伽马成像方面,它们可以实现实时传输、处理8扇区随钻方位伽马数据,同时支持16扇区随钻方位伽马数据存储,以备起钻后读取成像[2]。
1.2 国内近钻头伽马成像仪器
国内各大石油研究院也相继研究出了拥有自主知识产权的近钻头伽马随钻仪器,有一些带有初步的方位伽马测井功能。典型代表有中国石油公司推出的第1代地质导向仪器CGDS-1,以及中国石化胜利研究院于“十二五”期间推出的SL-NBGST地质导向仪器。
表1为国内研发的仪器与国际先进水平的近钻头伽马成像仪器的主要技术指标对比。从表1可以看出,国内近钻头方位伽马仪器在成像精度及耐温等级上与国外先进仪器存在较大差距,所以研究开发具有自主知识产权的近钻头方位伽马成像仪器,有助于对超薄油藏和非常规油气储层等的开发,还对于打破国外技术垄断具有重大意义。
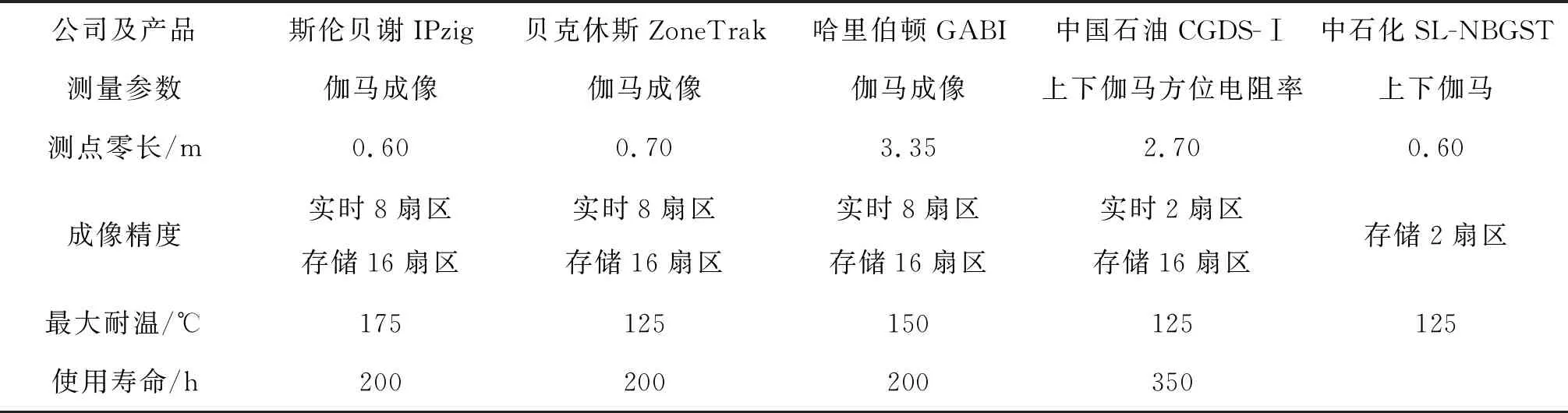
表1 国内外主要近钻头伽马成像仪器技术指标对比
2 CGDS近钻头伽马成像技术
2.1 仪器结构及功能
传统的随钻伽马测量仪器所测参数为地层的平均伽马值,不具备方向性。当测量参数反映出轨迹已经不在储层时,无法确定钻头是“底出”还是“顶出”,因此也无法确定如何调整井眼轨迹使钻头返回储层[3-6]。近几年兴起的新型随钻测量技术——随钻伽马成像测量技术通过对仪器的方位响应进行刻度,准确得出每个扇区方位地层的响应贡献。因此,高转速方位精确测量及校正技术是研制伽马成像仪器的关键技术之一。
近钻头伽马成像测井仪可以搭载的伽马探头数量为1个、2个、4个等,实时测量不同方位的自然伽马放射性强度。本次搭载伽马成像技术的CGDS仪器使用1个伽马探头实现复合钻井时的上下伽马测量,下一步拟计划安装2个伽马探头实现复合及定向工况下的上下伽马测量。如果需要,还可以将扇区配置为4、8或16个方位进行测量,起钻后读取数据,实现成像。
CGDS所用脉冲器基于正脉冲信号传输方式,鉴于传输能力有限,本仪器只将扇区中最上方和最下方的伽马值传输到地面。扇区中最上方的伽马测量值简称为“上伽马”,最下方的伽马测量值简称为“下伽马”。地质导向工程师根据上、下伽马值判断钻头在地层中的位置,预测井眼相对倾角的变化趋势,从而及时调整钻头前进方向,实现钻头在油藏最佳位置钻进,提高储层钻遇率。
如图1所示,仪器从顶部进入储层时,轨迹下方地层伽马值首先降低,然后轨迹上方地层伽马值降低;从顶部出层时,轨迹上方地层伽马值首先升高,然后轨迹下方地层伽马值升高;从底部进层时,轨迹上方地层伽马值首先降低,然后轨迹下方地层伽马值降低;从底部出层时,轨迹下方地层伽马值首先升高,然后轨迹上方地层伽马值升高;完全进层或出层后,轨迹上下方地层伽马值基本一致[3]。
2.2 电路组成
在CGDS原有电路系统中融入上下伽马测量功能,完成伽马成像测量电路架构设计,主要包括方位扇区测量电路及伽马计数模块测量电路[7-9]。如图2~3所示。
仪器中安装的三轴磁阻传感器和三轴加速度传感器测得数据计算出仪器重力工具面、方位角和磁工具面等信息,并通过这些信息将仪器轴向界面分成多个测量扇区[10-14],并将每个扇区中所测量的伽马数据与其相结合得到带有“方向性的伽马数据”。
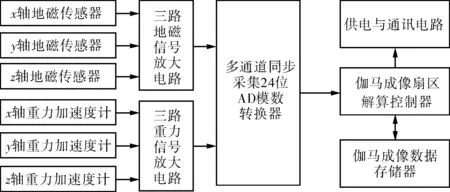
图3 伽马成像方位扇区测量电路模块
2.3 室内试验
项目团队将伽马成像样机短节装夹于车床之上,如图4,利用其旋转工件的特点模拟仪器在井下的旋转工况,在短节上方悬挂类地层核素模拟地层。因为类地层核素位于仪器(伽马传感器)正上方,所以当仪器工具面为0°时,测得伽马值应为最大,工具面为180°时最小。以上2个扇区的伽马值分别为上伽马值,下伽马值。

图4 伽马成像样机室内旋转试验
通过车床旋转样机,测得54、95、125、170、225、300 r/min 6种不同转速下的上下伽马值。试验数据如图5所示,表明样机已经初步具备高转速下方位精确测量及伽马成像测量功能。
此外,还对伽马成像测量单元及方位扇区数据测量融合单元及伽马传感器进行抗振动试验,试验结果表明方位扇区测量功能在强振动条件下解算出稳定工具面,扇区测量准确可靠。
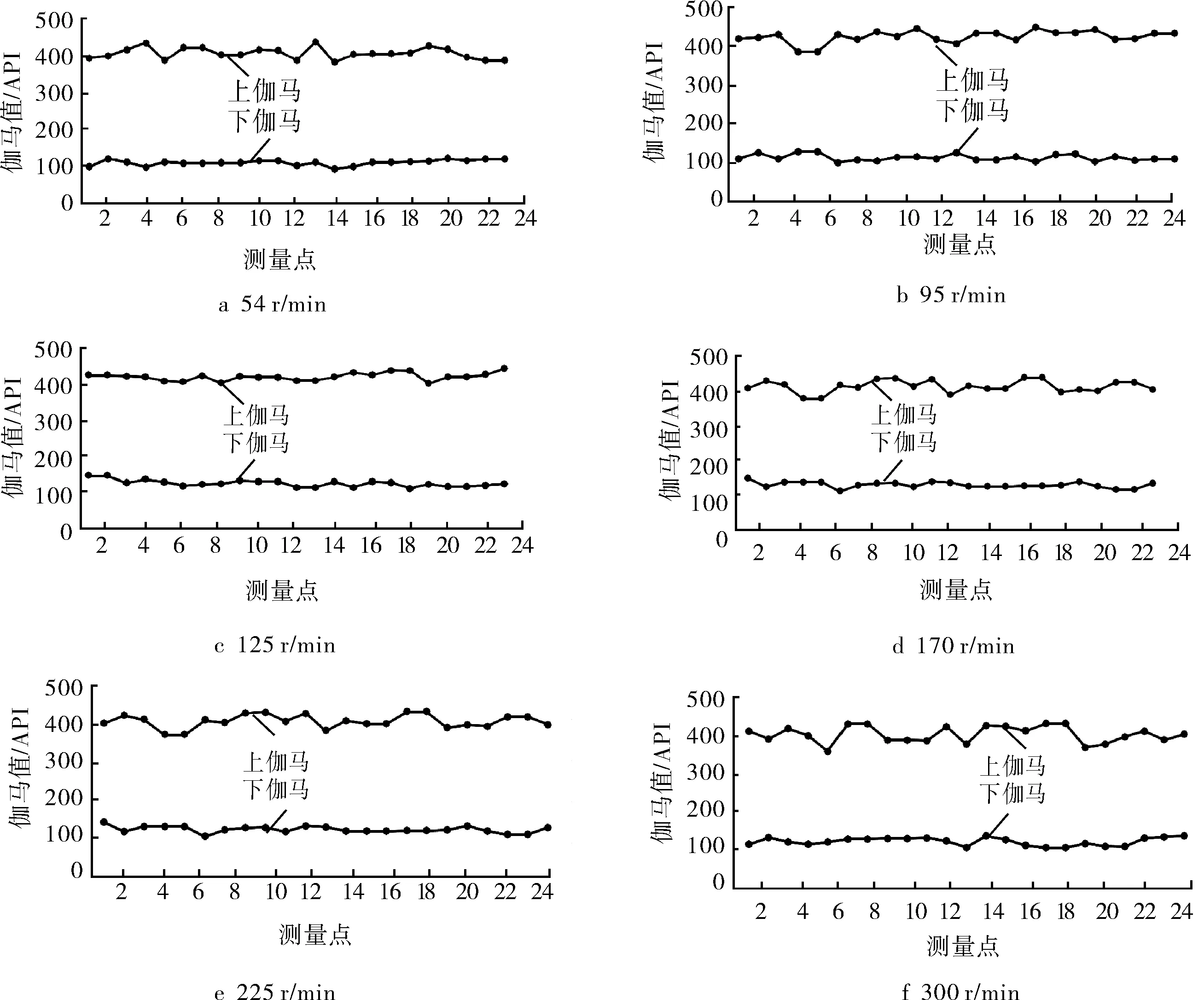
图5 伽马成像样机室内旋转试验数据曲线
3 现场应用
CGDS搭载近钻头伽马成像技术2套样机先后在吉林油田让70-4-12井,乾246F平11-5井,伊22-2-3井完成3井次现场应用,其中1#仪器累计试验时间533 h,循环356 h,纯钻293 h,这表明CGDS电池续航时间已经达到500 h,循环时间超350 h。
表2为仪器现场应用主要数据汇总。

表2 CGDS伽马成像仪器现场应用情况统计
CGDS现场施工时通过CGMWD正脉冲泥浆传输系统将近钻头伽马成像模块测量的扇区中最上方和最下方的伽马测量值实时传输到地面的地质导向软件平台,从而判断钻头在地层中的位置,并及时调整钻头钻进方向,以保证钻头在储层最佳位置中穿行。图6为CGDS地面软件输出的上下伽马曲线图。采用随钻方位伽马进行地质导向施工,利用方位伽马、伽马成像技术的边界效应,可以及时发现储层边界,从而确定进入储层的最佳时机,并提高对井眼轨迹的控制能力和储层钻遇率,进而更好地指导地质导向钻井施工。
4 结语
现场应用效果表明伽马成像技术已经完全融入CGDS近钻头地质导向系统,实现了CGDS测量功能的初步升级。通过不断迭代,优化设计方案,目前CGDS已经具备稳定性高等优势。下一步拟将围绕这一成熟的系统方案,继续升级其核心的测量及传输功能,包括实现全工况伽马成像技术、电阻率成像技术、自适应无线短传技术、电磁波遥测技术、连续波脉冲传输技术、并且完成仪器耐高温等级提升。
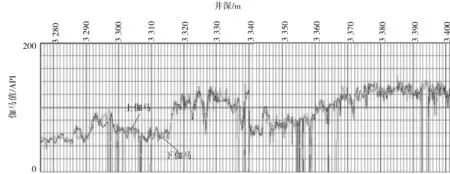
图6 CGDS实时上传上、下扇区伽马数据曲线
猜你喜欢
石油工业技术监督(2022年6期)2022-06-25
南北桥(2022年2期)2022-05-31
石油管材与仪器(2021年1期)2021-04-13
海洋石油(2020年4期)2021-01-13
数学学习与研究(2019年12期)2019-08-07
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
家庭影院技术(2018年8期)2018-08-21
电脑知识与技术·经验技巧(2017年9期)2018-02-24
现代商贸工业(2017年30期)2018-01-22