
矿井噪声主动控制技术研究及参数优化
2021-01-25 03:02程丽平李国豪
中国矿业 2021年1期
程丽平,李国豪
(山东科技大学智能装备学院,山东 泰安 271019)
随着煤炭需求量的持续增加,企业在追求开采速度的同时也更加注重保障井下工作人员的身心健康。长期工作在剧烈的噪声环境中,会对工作人员的生理、心理造成极大的伤害,使人反应迟钝、注意力分散,进而造成生命财产损失。尽管井下有很多隔音罩、隔音板等被动降噪隔音设施,但被动降噪仅对高频噪声有较好的降噪效果,因此,需要先进的降噪算法解决井下的中低频噪声问题。
主动降噪技术根据两个任意声波在一定条件下可进行叠加的基本原理,利用电子设备产生一个与环境噪声能量相等、相位相差180°的抵消噪声,让两声波在人耳处发生干涉,从而进行抵消降噪[1]。最早提出主动降噪控制理论的是德国科学家LEUG,随后英国人NELSON等[2]进一步深入研究了密闭空间的主动降噪技术,并取得重大突破。直到20世纪下半叶,随着信号处理技术的不断发展和集成电路的广泛应用,主动降噪技术在军用领域得到长足发展,后来逐步用于工业生产和民用领域,包括汽车、地铁、飞行器、矿井等。
本文将主动降噪技术运用到矿井的工作环境噪声治理中,首先,对井下工作环境中的噪声进行信号频谱分析,确定人耳对什么样的噪声信号敏感;其次,分析LMS算法存在声音反馈和延时两个重要问题,选用FX-LMS算法对环境噪声进行降噪,分析降噪效果;再次,为了保证参数的最优化,采用局部结构与整体算法相结合的思想,通过对信号的处理,最终得出最优参数;最后,通过MATLAB软件仿真验证了算法的有效性,并找出了存在的最优参数。
1 井下噪声分析
井下的噪声源主要是采煤机、输送机和破碎机等开采设备,且大部分噪声信号是采煤机切割煤体的噪声及其自身机械噪声,动力装置、传动装置、开采装置及液压装置等引起震动,从而产生噪声[3]。但是由于矿井井下工作空间狭小,反射噪声较多,容易在狭小空间内形成混合噪声,这会导致井下噪声远远超过国家标准[4]。在检测距离为1 m时,测得主要噪声源设备的噪声强度(dB),见表1。此外,分析人耳对噪声信号的敏感程度,对降噪处理来说十分重要,相对于相位,人耳对噪声的频率相当敏感,对频率的感知度与频率成正比[5]。人耳对声音的共振峰十分敏感,尤其是第一共振峰和第二共振峰[6]。

表1 主要噪声源设备噪声强度Table 1 Main noise source equipment noise intensity
2 主动降噪原理
主动降噪原理是由拾音麦克风检测环境中的噪音信号,电子设备产生一个与环境噪声能量相等、相位相差180°的反噪声信号,两声波在人耳处发生干涉,叠加信号的输出为零,从而达到主动降噪的目的。
设原环境噪声信号为式(1)。
pp=Acos(wt-kx)
(1)
式中:pp为环境噪声的声压;A为环境噪声的幅值;w为环境噪声频率;t为时间常数;k为波数;x为环境噪声在坐标系中的坐标。
人耳能接收到的声音密度可表示为式(2)。

(2)
式中:ρ为空气密度;c为声音在空气中的传播速度;
利用电子设备产生一个与环境噪声能量相等、相位相差180°的抵消噪声,见式(3)。
ps=αAcos(wt-kx+β)
(3)
式中:α为反噪声与环境噪声信的比值;β为反噪声信号与环境噪声信号的相位差。
抵消噪声与环境噪声信号叠加后,人耳能接收到的声音密度可表示为式(4)。

(4)
当α=1时,式(4)可改写为式(5)。

(5)
由式(5)可得,当cosβ趋向于-1时(β趋向于180°),Ep可取得最小值0,即可满足降噪要求。
3 主动降噪算法
主动降噪系统的核心是自适应滤波器的设计[7],其包括自适应滤波器结构和相应的自适应算法两部分。自适应滤波器包括IIR(infinite impulse response)滤波器和FIR(finite impulse response)滤波器,由于IIR结构不稳定,所以采用FIR滤波器(横向滤波器)[8]。FIR滤波器结构原理图如图1所示。LMS算法和FX-LMS算法是当今的主流降噪算法,其中自适应LMS算法尚未涉及到次级传输路径上的传递函数;相比于LMS算法,FX-LMS增加了次级通道传递函数,对参考信号进行处理,以此来平衡次级通道的影响[9]。

图1 横向自适应滤波器结构原理图Fig.1 Schematic diagram of transverse adaptive filter structure
一般来说,前馈式主动降噪控制系统中存在两个重要问题。首先是声音反馈问题,次级声源发出的次级声源信号极易返到上游,通过参考传感器输入到系统中,这类信号极易干扰参考声音信号,使系统极其不稳定[10]。其次是信号传递的延时问题,原声音信号从传感器传输到次级声源,再从次级声源传输到传感器这中间会产生延时。除此之外,电信号从传感器传输到扬声器也会产生延时。所以FXLMS算法在次级通道路径上加入C(z)信号,对原始参考信号进行一定的处理,用以平衡次级路径传递函数的影响,这就是LMS算法与FXLMS算法最本质的区别[11]。FXLMS算法框图如图2所示,其中,x(k)为原始参考信号,P(z)为声源与误差传感器之间的传递函数,C(z)为次级通道路径上的传递函数,d(k)为误差传感器采集到的噪声信号,y(k)为输入信号经过迭代处理后的信号,e(k)为误差信号。

图2 FXLMS算法框图Fig.2 FXLMS algorithm
期望语音信号经过初级通道路径传输后,可以用参考信号与初级路径传递函数的卷积来表示,见式(6)。
d(n)=x(k)×P(z)
(6)
扬声器产生的次级语音信号可以表示为式(7)。
s(k)=y(k)×C(z)
(7)
滤波器权值系数可以表示为式(8)。
W(k)=[w1(k),w2(k),…,wL(k)]T
(8)
算法输入信号矢量可以表示为式(9)。
F(k)=[f(k),f(k-1),…,f(k-L+1)]T
(9)
可得出,在FXLMS算法中,k时刻L阶的滤波器输出信号为式(10)。

(10)
将式(10)带入式(7)中得式(11)。
s(k)=rT(k)W(k)
(11)
式中,r(k)为滤波信号,是次级通道传递函数与参考信号的卷积,即式(12)。
r(k)=X(k)×C(k)
(12)
可得出输出的误差信号为式(13)。
e(k)=d(k)+rT(k)W(k)
(13)
滤波权值的关系式为式(14)。
W(k+1)=W(l)-2μe(k)r(k)
(14)
在(LMS)算法推导当中,将(R)定义为参考信号的自相关矩阵,用正交矩阵(Q)表示为式(15)。
R=Q∧QT
(15)
式中,∧为R的特征值组成的对角矩阵,即式(16)。
∧=diag(λ1,λ2,…,λL)
(16)
由式(14)~式(16)得式(17)。
W(n+1)=Q[1-2μQ∧QT]W(n)+2μP
(17)
经递推循环可得,其数学期望为式(18)。
E[W(n+1)]=
Q[1-2μ∧]n+1Q-1E[W(0)]+2μP
(18)
式中,W(0)为滤波权值初值,可得出式(18)收敛条件为式(19)。
(19)
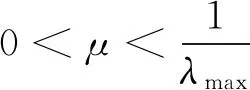
式中,λmax为R的最大特征值。式(19)中给出了收敛步长的取值范围,即步长在这个收敛范围内能够收敛。式(18)中收敛步长不应大于R的最大特征值。但由于R是不确定的,仅知道R为正定矩阵,正定矩阵的特征值均大于0。所以R的迹与参考信号满足式(20)和式(21)的关系。

(20)
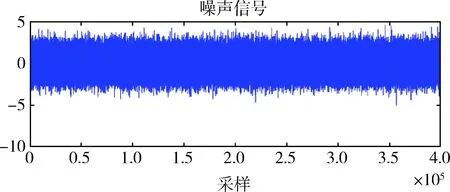
λmax (21) 将式(20)和式(21)带入式(19)得式(22)。 (22) 由于参考信号的均方和可以经过计算求得,所以可提前根据式(22)计算得到设备的收敛步长取值范围。 收敛速度、稳态误差(即收敛精度)、计算量是评价自适应算法性能的三个重要指标[12]。由于井下充斥着各种各样的噪声,仿真中使用白噪声作为噪声信号,如图3所示,期望获得的声音信号如图4所示。在MATLAB开发环境下使用FX-LMS算法进行仿真实验,分析收敛速度和稳态误差对实验结果的影响。 图3 白噪声信号时域信号图Fig.3 Time domain signal of white noise signal 在主动降噪系统中,影响系统稳定性的主要是收敛因子μ和滤波器阶数L。其中,μ主要影响系统的收敛速度和稳定性;L主要影响系统的自适应滤波效果,L越高,滤波效果越好[13]。但是在主动降噪算法中,滤波器阶数一般是不变的,为保证合理的滤波效果和滤波效率,本文仿真中设置的滤波器阶数为32。 设置L=32,μ=0.1,0.01,0.001时的输出信号如图5所示,误差曲线分别如图6所示。由图5和图6可知,当μ=0.1时,实际输出完全偏离期望输出,随着采样数据误差不断增加,系统不稳定;当μ=0.01时,输出大致符合期望输出,系统稳定;且输出误差基本小于0.01,可满足输出要求;当μ=0.001时,处理后的音频会产生失真,且误差增大。 图6 误差曲线图Fig.6 Error curve 图5 输出信号时域信号图Fig.5 Time domain signal of output signal diagram 经多次试验并分析结果得:当收敛系数变小时,误差变小,但是迭代计算时间变长,达到稳态时间变长,会影响设备的滤波性能,所以应该选择合适的收敛步长μ,本实验中所得最优解为μ=0.01。 图4 期望信号时域信号图Fig.4 Time domain signal of expected signal 根据算法原理和现实环境,进行了主动降噪系统的软硬件设计,系统框图如图7所示。使用阵列麦克风采集声音信号,分别采集近场的语音信号和设备产生的远场噪音信号,并使用LMV1091芯片进行远场噪声抑制,该芯片降噪后噪声低、音效好、无需编写控制程序,并且功耗极低,可大幅度增强数字化语音信号。采用KE128作为主控制器芯片,该芯片不仅含有低功耗Arm Cortex-M0+内核,而且装有8-128 kB的嵌入式闪存,具有良好的EMC/ESD兼容性。 图7 主动降噪系统结构框图Fig.7 Diagram of active noise reduction system 反相噪声输出电路是基于AS3502芯片设计的,噪音信号经过内部电路和FX-LMS算法进行反相处理,得到相位相差180°、能量相同的抵消噪声信号,最后经过左右声道输出引脚输出,左右两个耳机同时产生“抵消噪声”声音,用来与原噪声进行叠加抵消,从而实现主动降噪效果。 矿井井下噪声强度大,频率范围相对集中,选用的主动降噪设备仅对高频噪声信号有较好效果。 本文通过对LMS算法和FX-LMS算法的原理进行分析研究,选择FX-LMS主动降噪算法,降低噪声对井下工作人员身心健康的影响,同时保证工作人员之间的正常交流,对井下操作的高度安全化和生产效率不断提高有重要意义。 仿真结果表明,基于误差信号的FX-LMS主动降噪方法,选择合适收敛步长和滤波器长度,可以得到较为理想的降噪效果,但由于FX-LMS算法的步长是固定的,所以无法兼顾收敛速度和稳态误差。如何更好地提高主动降噪的降噪范围和效果,还需要更深、更广泛的研究与探索。
4 仿真结果与分析



5 主动降噪技术的实现

6 结 语
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
成都信息工程大学学报(2021年5期)2021-12-30
电子制作(2018年23期)2018-12-26
测控技术(2018年7期)2018-12-09
测控技术(2018年11期)2018-12-07
光学精密工程(2016年4期)2016-11-07
海洋科学进展(2016年3期)2016-08-12
中国卫生标准管理(2015年16期)2016-01-20
河北科技大学学报(2015年5期)2015-03-11
电测与仪表(2014年11期)2014-04-04
