
基于四桥臂的三次谐波注入式永磁同步电机转矩密度优化
2021-01-25 03:23:12马嘉杰孙培德
微特电机 2021年1期
马嘉杰,孙培德
(东华大学 信息科学与技术学院,上海 201600)
0 引 言
永磁同步电机是转子励磁采用永久磁铁励磁的同步电动机,具有起动牵引力大,功率密度高,稳定性高等优点[1]。国内外学者对永磁同步电机进行了深入研究,并将其广泛应用于电动汽车[2-3]、航空航天[4-5]等领域。同时,三相四桥臂永磁同步电机拓扑结构如图1所示。其中三相电枢绕组为星形连接,中性点由导线引出,与第四桥臂相连构成半开放式绕组连接方式。这种拓扑结构在永磁同步电机中性点引出一根导线,连接新增的第四桥臂,不仅减小了变换器体积和质量,也解决了三相输出电压不平衡[6]的问题,控制方法也比较灵活多变。这种拓扑结构与三相经典拓扑相比,中性点的引出增加了一个额外自由度,也为三次谐波电流提供了通道,并且提高了系统的容错能力[7-9],因此具有良好的应用价值。
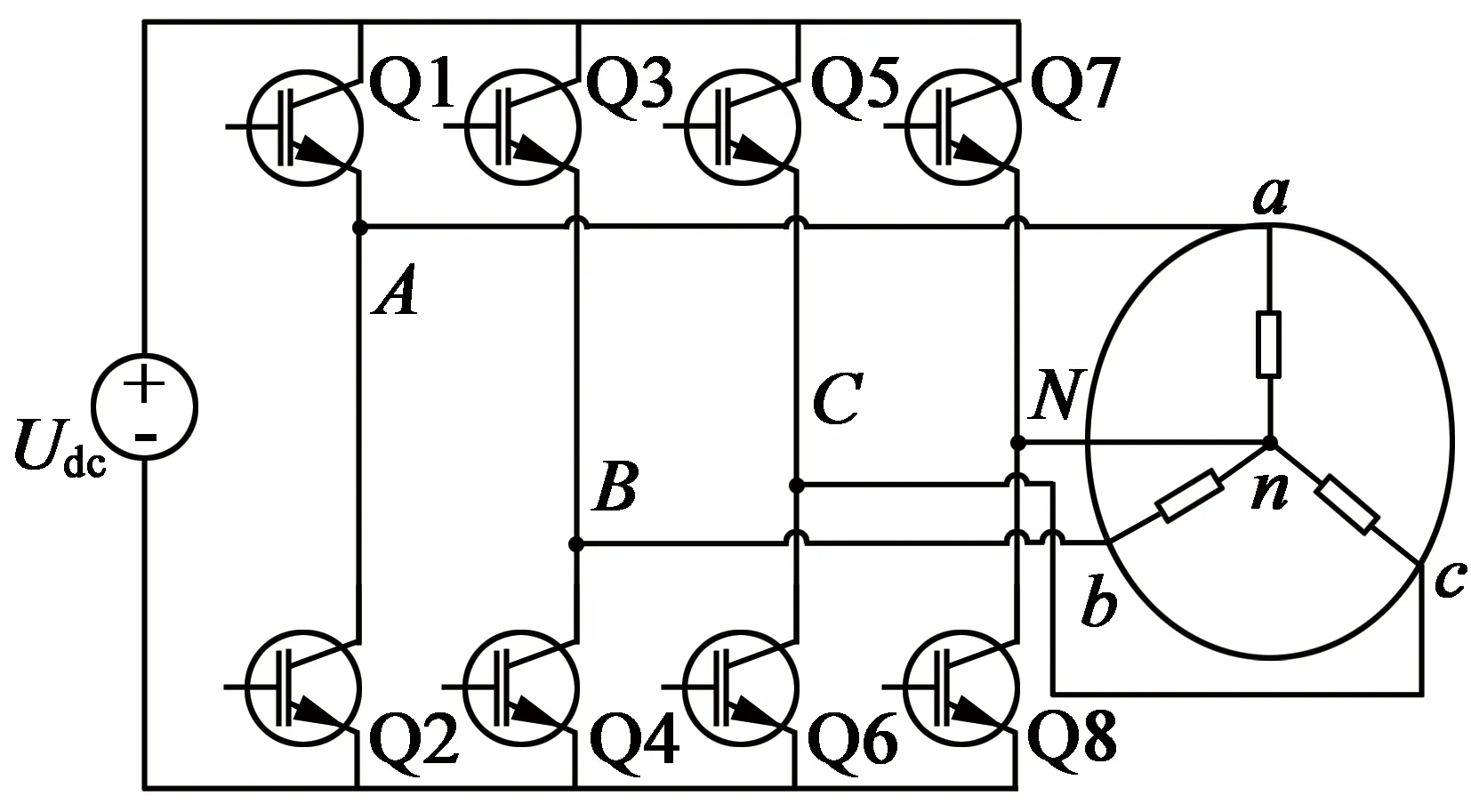
图1 四桥臂拓扑永磁同步电机系统
图1的三相四桥臂永磁同步电机系统,注入三次谐波电流是有意义的,在基波的基础上注入三次谐波,使得相电流增加,转矩也增大。对于传统绕组星形连接的三相电机,就算外部注入三次谐波电流,定子电流上的三次谐波分量也会互相抵消,即三相电机中性点没有电流的三次谐波分量,因此必须在中性点引出一根线连接第四桥臂才能使三次谐波电流通过。基于四桥臂拓扑的永磁同步电机,外部注入三次谐波,可以提高电机的功率和转矩密度[10-12]。同时,也可以运用到多相电机中,如五相电机[13-15],九相电机[16-17]等。
本文提出了一种基于四桥臂拓扑的永磁同步电机系统控制策略,首先建立了三相四桥臂永磁同步电机数学模型,采用磁场定向的矢量控制方法,实现电流的闭环控制,使得电机能够正常运转。然后在相电流幅值不变的前提下,注入三次谐波电流,分别对基波和三次谐波进行闭环控制,观察谐波注入前后电机电流和转矩的变化,最后分析了三次谐波电流注入率的最优值。
1 四桥臂拓扑数学模型
本文选择三相四桥臂永磁同步电机为研究对象,如图1所示,忽略各种损耗并且在三相绕组和磁路分布均对称的理想情况下,我们可以把永磁同步电动机在三相静止a,b,c坐标系下的电压方程写成:
(1)
式中:R是定子绕组的电阻;L为定子绕组的自感;M为定子绕组的互感;Ux,ix,Ex分别是x相对于直流电压中点的电压,x相电流,x相反电动势(其中x是指a,b和c)。Un是指电机中性点与第四桥臂中点之间的电压。
中性线电流:
in=-(ia+ib+ic)≠0
(2)
通常,在三相a,b,c坐标系上的永磁同步电机控制系统设计是十分复杂的,为了便于控制,可以将在三相静止坐标系上数学模型转换到两相旋转坐标系上。由a,b,c坐标系转换到d,q坐标系的公式可以表述:
(3)
通过式(3),可以得到永磁同步电动机在两相旋转d,q坐标系下的电压方程:
(4)
(5)
式中:Ux,ix,Lx和Ex(x=d,q,0)分别为旋转坐标系d轴,q轴,0轴的电压,电流,电感和反电动势;ωe为转子电角速度;ψf为永磁磁链。
电磁转矩方程:
(6)
式中:p为电机的极对数。
2 系统控制策略
2.1 3D-SVPWM调制
设三相四桥臂逆变器的相中点电压为Uan,Ubn,Ucn。由此可以得到一个非常简单且直接的表达式:
(7)
式中:Sa,Sb,Sc,Sn分别表示四个桥臂的开关状态:等于“1”时表示上桥臂开通,下桥臂关断;等于“0”时表示上桥臂关断,下桥臂开通。这样,一共得到16个不同的开关状态,对应16个不同的开关矢量。
在三相静止a,b,c坐标系下将这16个开关矢量画成空间矢量图,如图2所示,得到了一个由开关电压矢量构成的十二面体。以状态10为例,此时Sa,Sb,Sc,Sn分别为0,0,1,1,Uan,Ubn,Ucn分别为-1,-1,0。这表示a和b相上桥臂关断,下桥臂开通;c和n相上桥臂开通,下桥臂关断。对应开关矢量为V10,位于图中(-1,-1,0)坐标处。
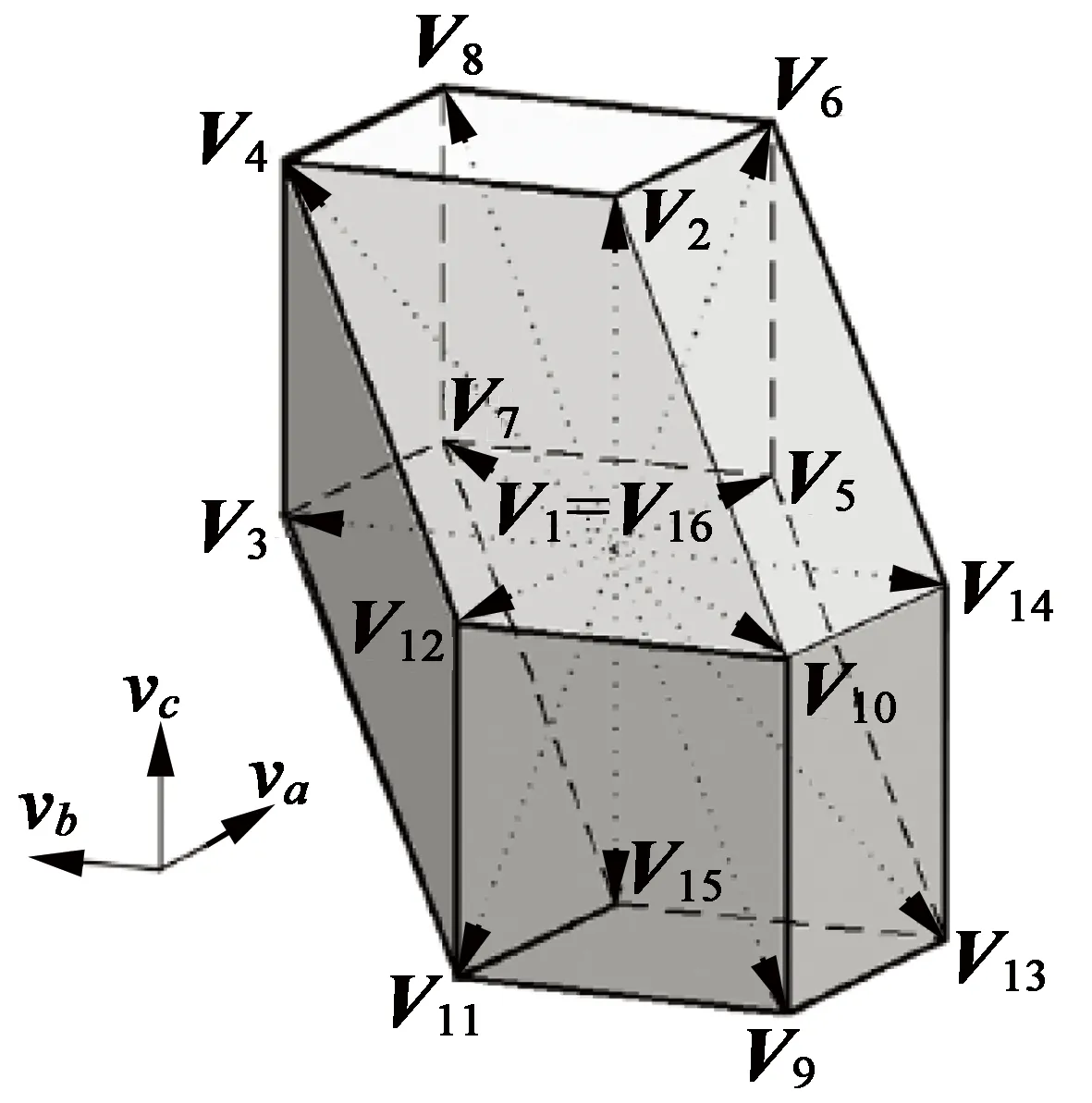
图2 开关电压矢量图
针对图2,用va=0,vb=0,vc=0和va-vb=0,vb-vc=0,va-vc=0这6个平行于a,b,c坐标轴的平面可以将开关矢量图分割为24个空间四面体。每个空间四面体大小相等,且都是由三个非零矢量和两个零矢量组成。
按照空间矢量合成原理,可以得到矢量占空比,即参考电压矢量的大小等于各开关矢量与占空比的乘积之和。
(8)
式中:Va-ref,Vb-ref和Vc-ref分别是参考电压矢量在a,b,c坐标系下的投影。V1a,V2a和V3a分别是参与合成的三个非零矢量在a坐标轴的投影值,同理可得b和c坐标轴的投影值;d1,d2和d3对应三个非零矢量的占空比。
在得到开关矢量的占空比后,可以对矢量的开关顺序进行排列,从而实现对输出电压的控制。
2.2 系统的矢量控制策略
前文分析了三相四桥臂永磁同步电机系统在三相静止a,b,c坐标系下的数学模型,并在此基础上推导了在两相旋转d,q坐标系下的数学模型,为后续的控制奠定了基础。

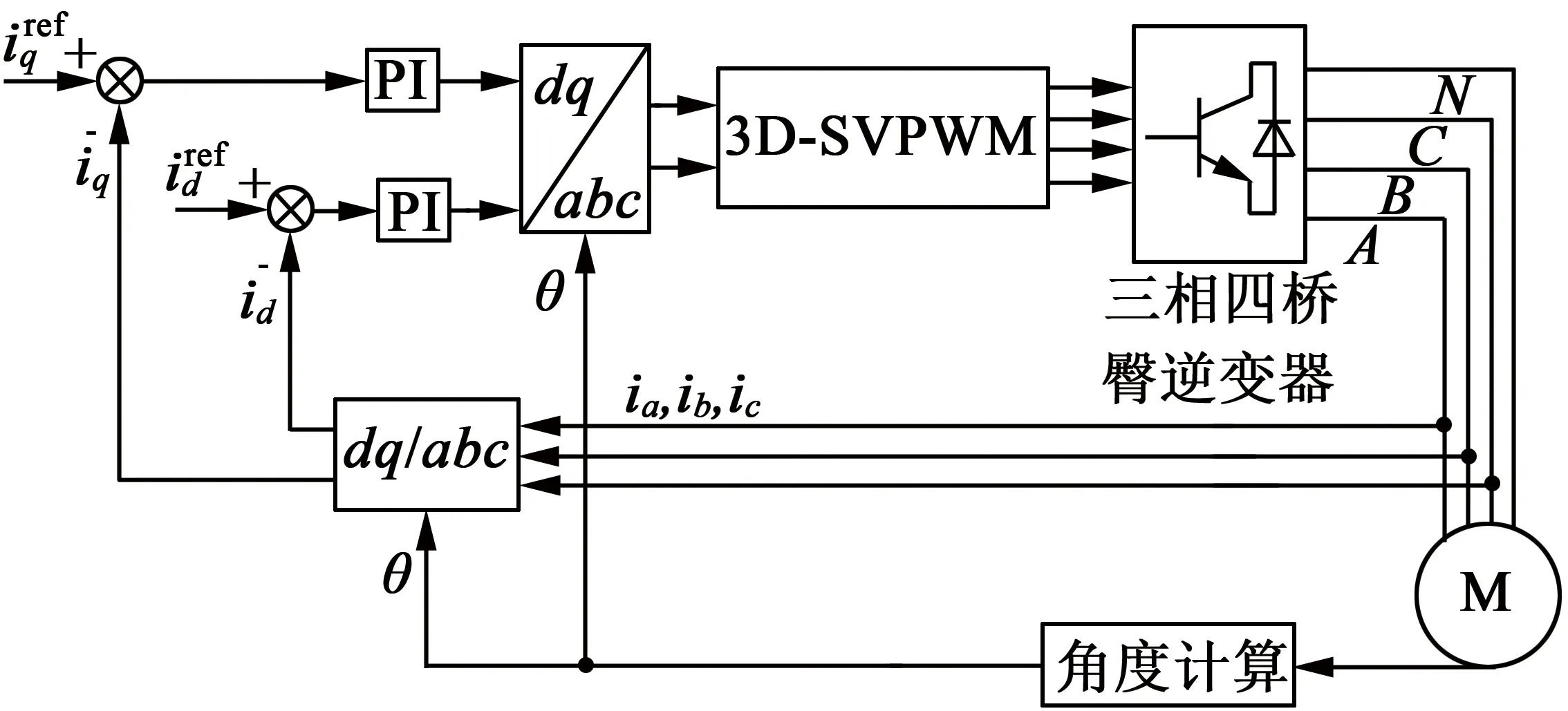
图3 矢量控制系统框图
3 三次谐波电流注入
本文在控制相电流幅值不变的前提下,注入三次谐波电流,分别实现基波和三次谐波电流的闭环控制,观察电机转矩的变化,然后求最优注入率。一般情况下,三次谐波注入率k≤0.2,简单计算可得谐波电流注入后,相电流有效值比原来增加了2%,并不影响电机的发热情况,几乎可以忽略不计。注入三次谐波电流后,电流幅值减小,在保持谐波电流注入前后相电流幅值不变的前提下,需增加基波电流的幅值。由于电流的增加,以及三次谐波电流和磁场产生恒定转矩,导致电机转矩显著增大,但电机体积不变,所以转矩密度提高了。推导如下:
设含有三次谐波磁场的三相四桥臂永磁同步电机系统,a相电流的基波分量和三次谐波分量表达式分别如下:
(9)
其他各相电流符合三相对称原则,这里不再具体表述。
通过坐标变换,可得:
(10)
设正弦供电时的基波电流幅值I=1 A,且I3=kI1,k为三次谐波电流注入率。为保证三次谐波电流注入前后相电流幅值不变,则:
I1>I
(11)
所以正常情况下的电磁转矩
(12)
而注入三次谐波电流以后的电磁转矩:
(13)
在约束条件满足:
(ia1+ia3)|max=I
(14)
求式(13)中Te2的最大值,即可求得注入率k的最大值。在谐波注入前后相电流幅值不变的前提下,通过数值计算,当注入率为0.166 7时,基波电流幅值最大,是原来基波电流幅值的1.154 7倍。又因为ψf≫3ψf3,当基波电流幅值最大时,就相当于电磁转矩Te2最大。电机电磁转矩随三次谐波电流注入率的变化曲线如图4所示。当k=0.166 7时,得到最大电磁转矩为13.163 6 N·m。可见,控制三次谐波电流的最优注入率,可以将转矩提高21.3%。
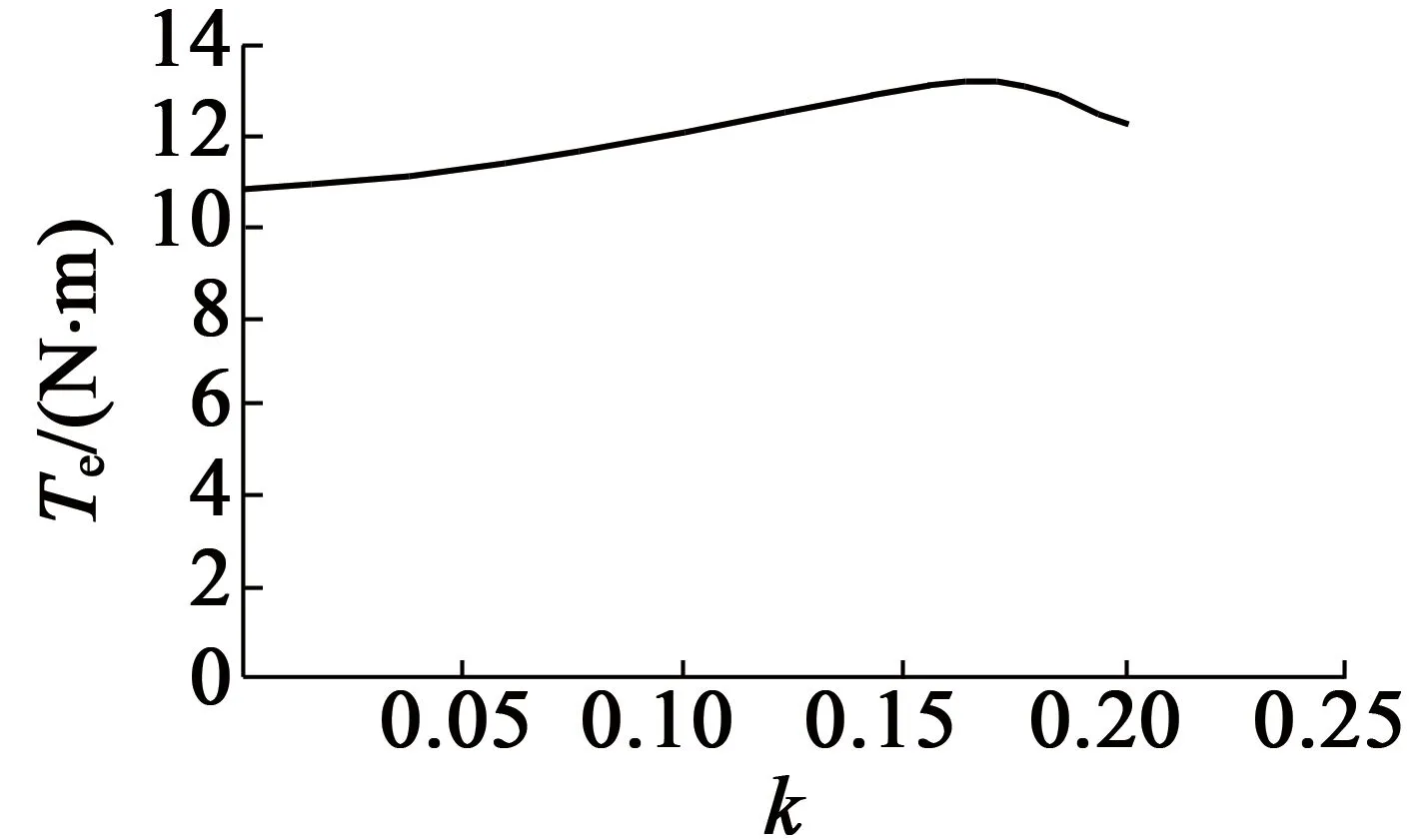
图4 电磁转矩与k的关系图
4 仿真分析
为了证明本控制算法的正确性,搭建系统仿真模型,在Simulink平台上实现。设直流母线电压Udc=600V,PWM开关频率为10kHz,负载转矩TL=10 N·m,其中电机参数如表1所示。
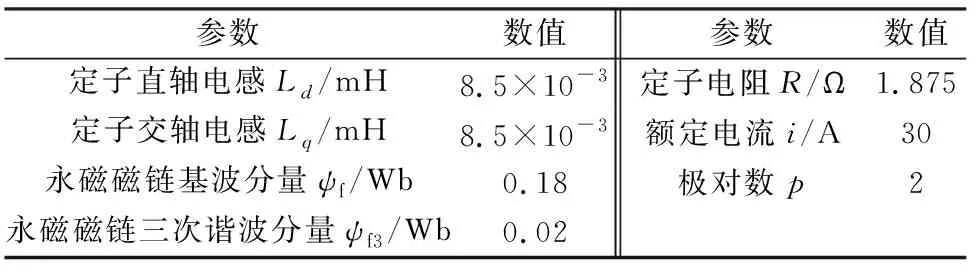
表1 永磁同步电机参数
图5和图6分别给出了正常情况下的相电流波形以及电磁转矩波形。从图5、图6中可以看出,三相电流为标准的正弦波,相位差120°,其幅值为20 A,电磁转矩为10.8 N·m。
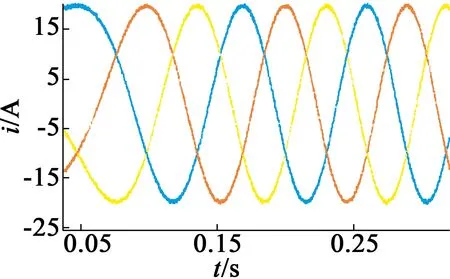
图5 三相电流
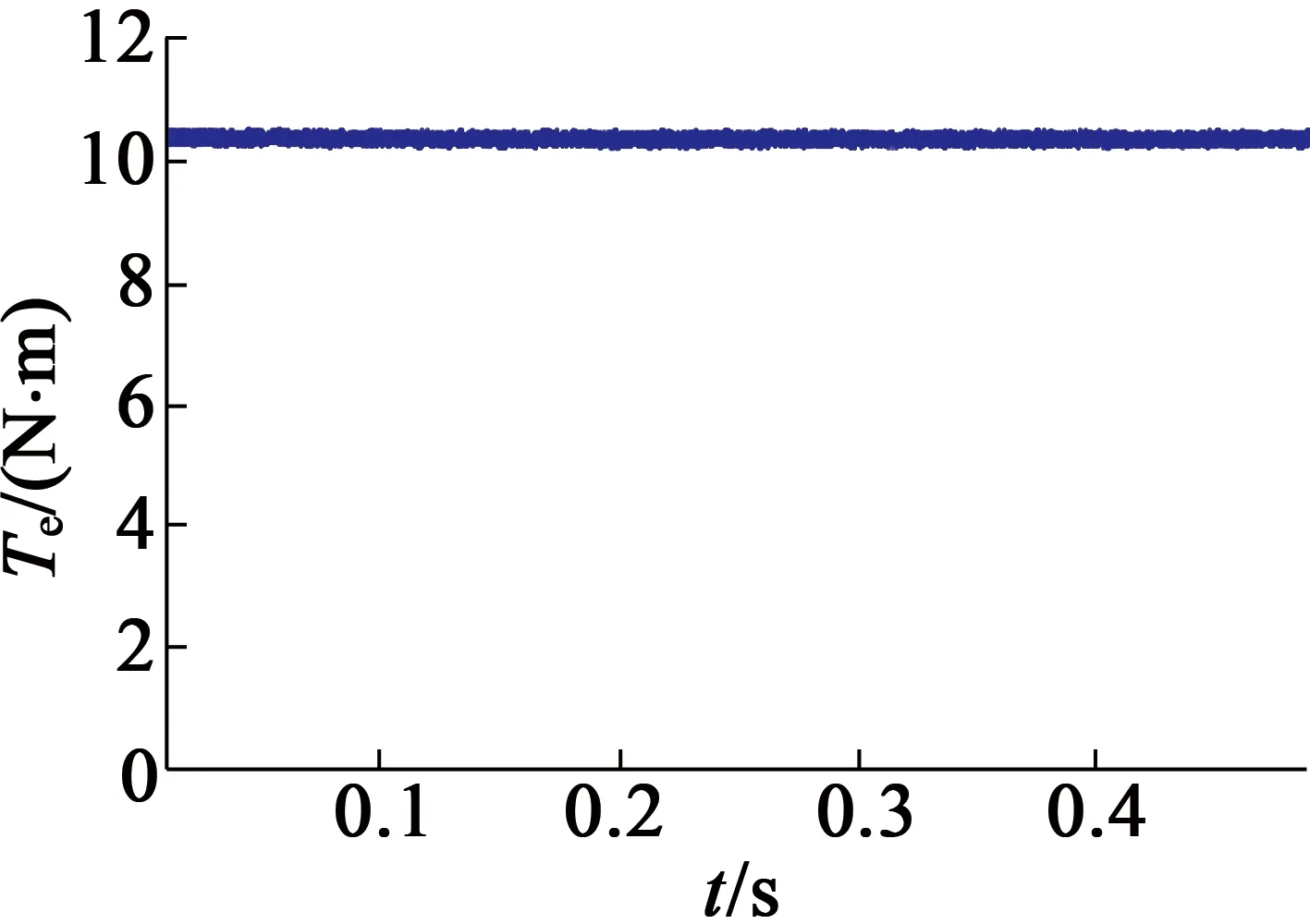
图6 电磁转矩
图7和8分别给出了三次谐波电流注入率k=0.166 7时的相电流波形以及电磁转矩波形。从图7、图8中可以看出,由于注入了三次谐波电流,三相电流变为马鞍波形状,相位差还是120°,其幅值没有变化,还是20 A,但是电磁转矩约为13 N·m。
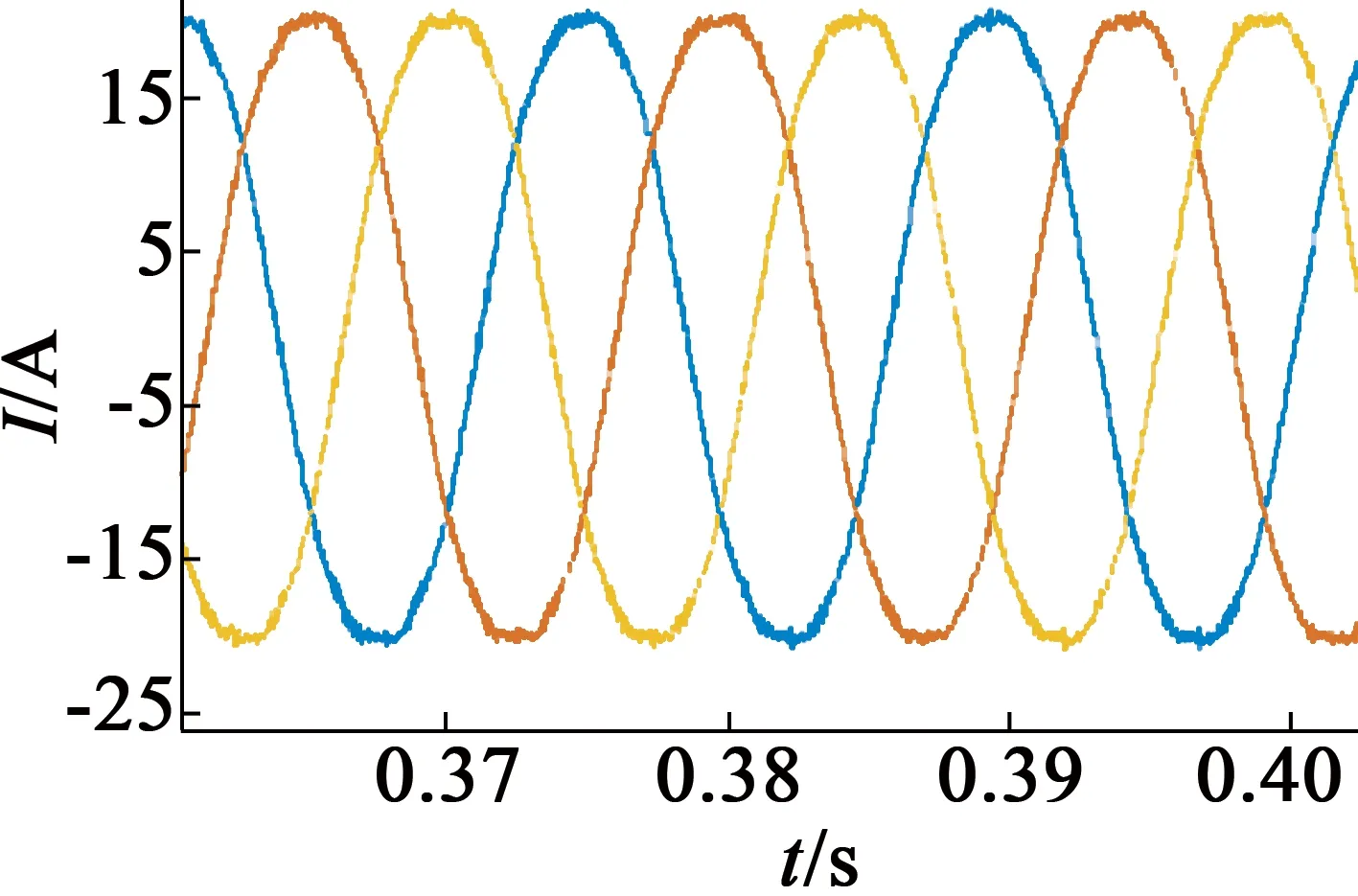
图7 三相电流
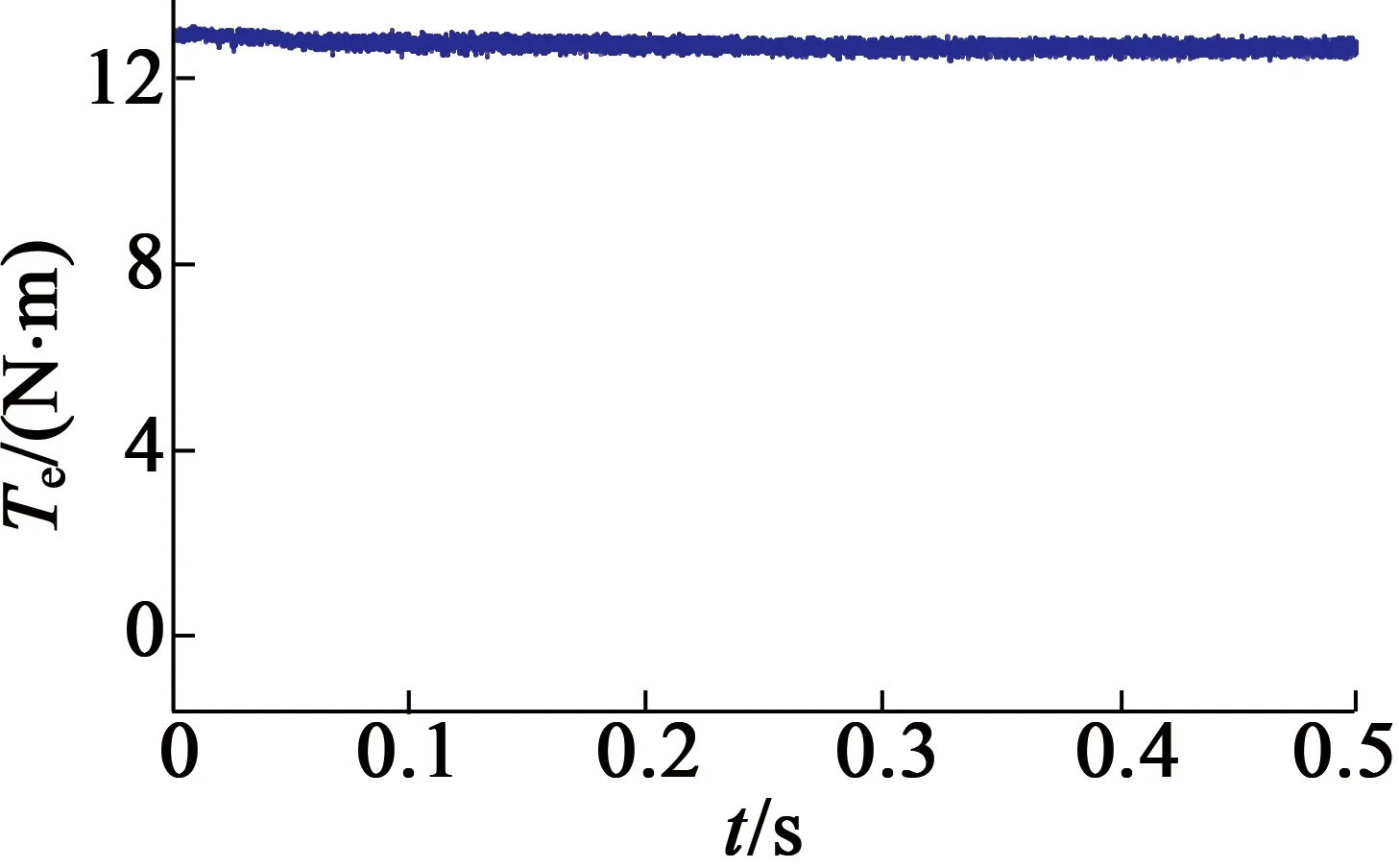
图8 电磁转矩
综上所述,在相电流幅值不变的前提下,注入三次谐波电流,可显著增加电机的电磁转矩。在 0.166 7的最优注入率时,转矩最大可以增加约20.4%,与理论结果相符。
5 结 语
本文对三相四桥臂永磁同步电机矢量控制系统注入三次谐波电流,经过理论分析,仿真实验,得出以下结论:
(1) 在相电流幅值不变的前提下,注入三次谐波电流,可以将电磁转矩提高20%左右,电机的转矩密度显著提高。
(2) 采用磁场定向的矢量控制方法,能够实现对基波和三次谐波电流的控制,电机运转正常。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
工友(2023年7期)2023-07-21 06:02:38
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年21期)2014-04-04 12:32:08
电测与仪表(2014年19期)2014-04-04 12:06:16
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
