
利用STM32单片机的大功率智能渔探仪的设计
2021-01-23 10:32许国忠饶连周沈志亮
三明学院学报 2020年6期
许国忠,饶连周,沈志亮
(三明学院 机电工程学院,福建 三明 365004)
随着全球科技的极速发展,各个行业和领域都应用上了高科技。对于我国沿海地区和沿河地区,随着日益增加的海洋资源需求,人们越来越重视对渔业资源的开发。渔探仪是一种把声呐技术运用在渔业上的现代化设备,通过发射一定频率的超声波,计算回声时间和波形等参数来确定鱼群的位置、大小和种类[1-4]。一直以来,超声波探鱼系统的发展方向大都是改进超声波探测技术提高探鱼器性能,如利用多波束技术进行探鱼[1],或是换能器垂直安装,发射垂直向下的波束来探测设备下方的鱼群分布情况[2],或是通过改善显示技术,提升探鱼效果和用户体验。为了解决传统探鱼系统设备体积大、显示效果差、价格昂贵等缺点,本文设计了一款大功率、性价比高和能对水下鱼群探测和智能分析鱼群大小的渔探仪,能够充分满足小型捕鱼船的使用需求,并在实际生产生活中产生经济效益。
1 系统的结构
为了使整个渔探系统可以探测比较远的距离,超声波发射模块的功率要相对比较大,所以选择了50 kHZ/200 kHZ的双频600 W大功率渔探头。前级超声波驱动电路是采用晶振产生的脉冲信号,经74HC4024芯片分频,再经HD29026AP芯片和推挽电路升压后,来驱动外接渔探头实现超声波信号发送。为了可以准确地接收到超声波反射回来的回波,选择了中频变压器进行回波的选频和放大。回波的采集和高精度分析对于处理器的要求也是相对比较高的,所以选择使用ARM公司的STM32作为渔探仪主控器,它拥有很强的数据处理能力。将处理后的信号传送给STM32单片机进行数据处理,处理完的数据通过外部液晶显示屏进行显示。考虑到该系统使用环境的光度的不稳定性,可通过外传按键模块调节液晶显示屏的亮度和对比度等参数[1-4]。系统还需4种电压12、8、5和3.3 V,可采用 LM2596构成的输出电压12 V的电源模块和芯片LM7808、LM7805、ASM1117-3.3 来 获得。整个系统的硬件框图如图1所示。
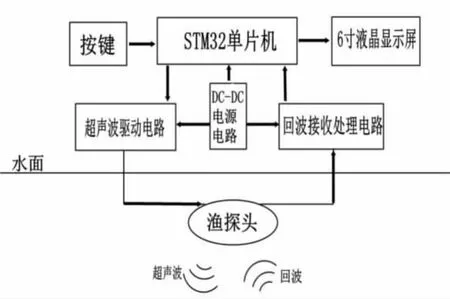
图1 基于STM32单片机的大功率智能渔探仪硬件框图
2 系统的软硬件设计
2.1 超声波发射电路的设计
超声波发射电路是由频率信号发生电路和推挽电路构成,如图2~3所示。其中由一个6.464M晶振Y1产生脉冲信号,经过74HC4024分频器U3构成的分频电路进行分频,再经过与非门和HD29026AP所构成的电路进行逻辑转换和信号增强处理。利用处理后的信号来驱动Q1、Q2开关管和功率变压器实现推挽升压,推挽升压后通过D1和D4所得直流信号来驱动J3所外接渔探头,进行频率为200 kHz、瞬间功率为600W的超声波信号发送。发送功率的大小取决于推挽电路的设计功率,所以推挽电路的功率变压器选用EE28磁芯骨架,同时HD29026AP驱动增强电路也确保Q1、Q2有足够的驱动电流[4-6]。
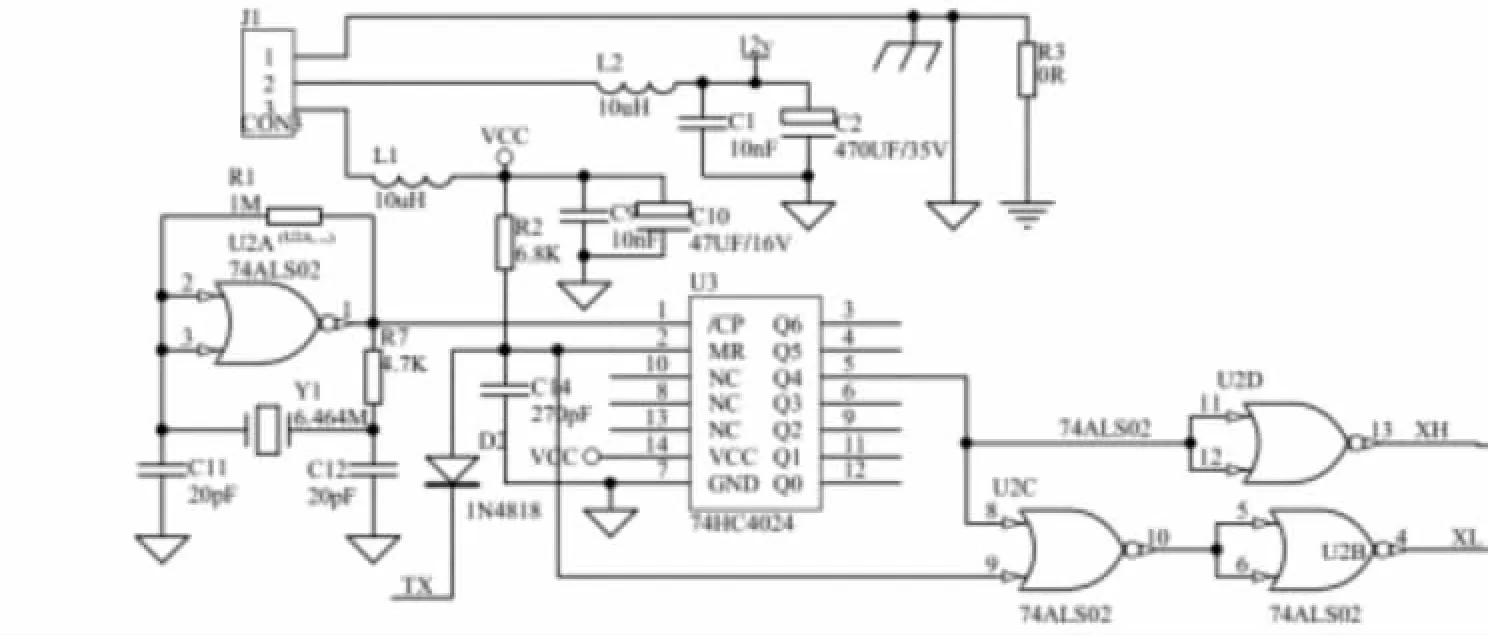
图2 频率信号发生电路
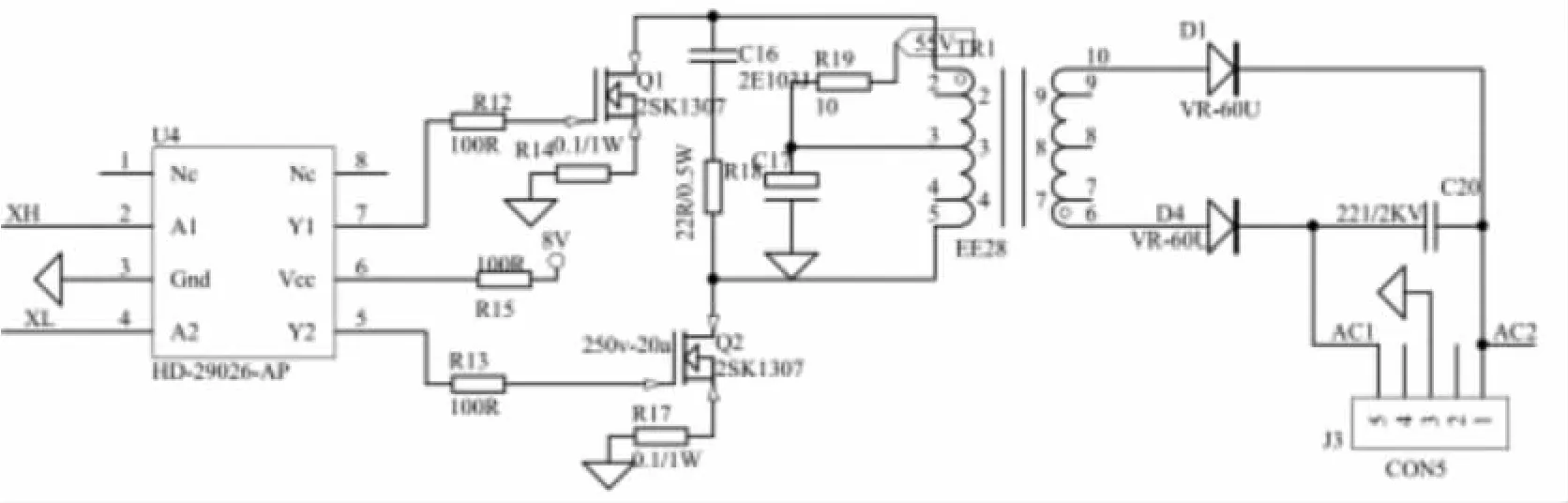
图3 推挽升压电路
2.2 超声波接收电路的设计
超声波接收电路由超声波回波滤波选频放大电路和放大电路构成,如图4~5所示。因为图3中D1、D4输出的驱动渔探头信号是直流信号,然而渔探头所接收的回波信号是属于交流弱信号,所以利用C19、C21滤除直流信号的干扰,因为电容具有通交隔直的特性[7]。所得信号再经过T4中周构成的选频电路进行选频处理。因为回波信号是弱信号,所以要进行信号放大,通过 T1、T2和T3构成的放大电路进行多级信号放大、滤波和整流处理。最后通过D6所得的直流信号传输给单片机进行数据分析和处理。
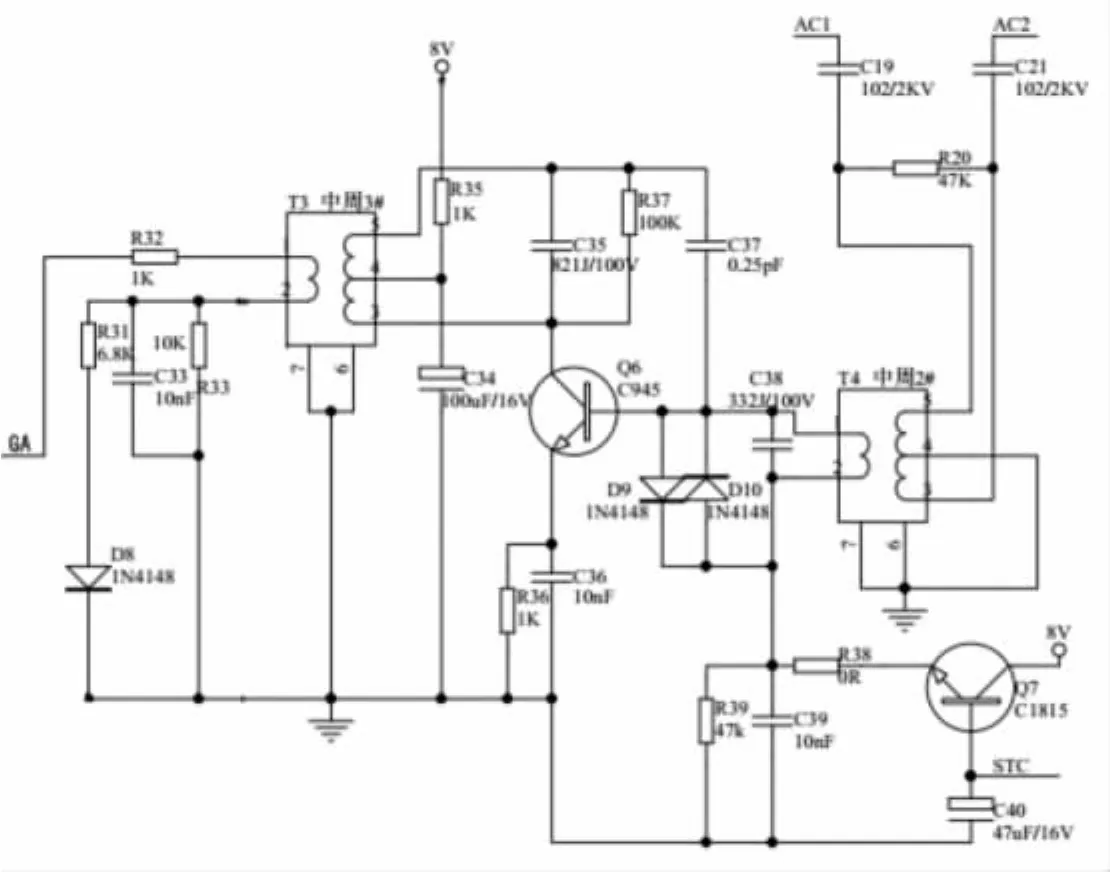
图4 超声波回波滤波选频放大电路
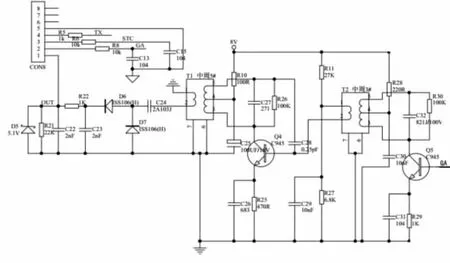
图5 放大电路
2.3 单片机、按键和液晶显示器电路的设计
单片机、按键和液晶显示器电路如图6所示。选用STM32F103VET6单片机作为整个系统的数据处理中心,该单片机是基于ARM Cortex-M3核心的32位微控制器,工作频率为72 MHz,内置512 kB片内FLASH,64 kB片内RAM,片内FLASH支持在线编程(IAP),内置512 kB片内FLASH,64K片内RAM,片内FLASH支持在线编程(IAP)。通过片内BOOT区,可实现串口下载程序(ISP),支持片外高速晶振(8M)和片外低速晶振(32K)。其中片外低速晶振可用于CPU的实时时钟,多达80个IO,足够液晶显示屏和其他外设的拓展。图6中U1芯片第17脚是采集回波信号OUT,TFT1为液晶显示屏,S1、S2、S3、S4是外部按键输入,分别控制启动与暂停、画面左移、画面右移和调节深度控制。D4和D5是指示灯,系统通过J18接口进行程序下载。CPU操作电压范围:2.0~3.6 V,一般我们选用3.3 V电压。
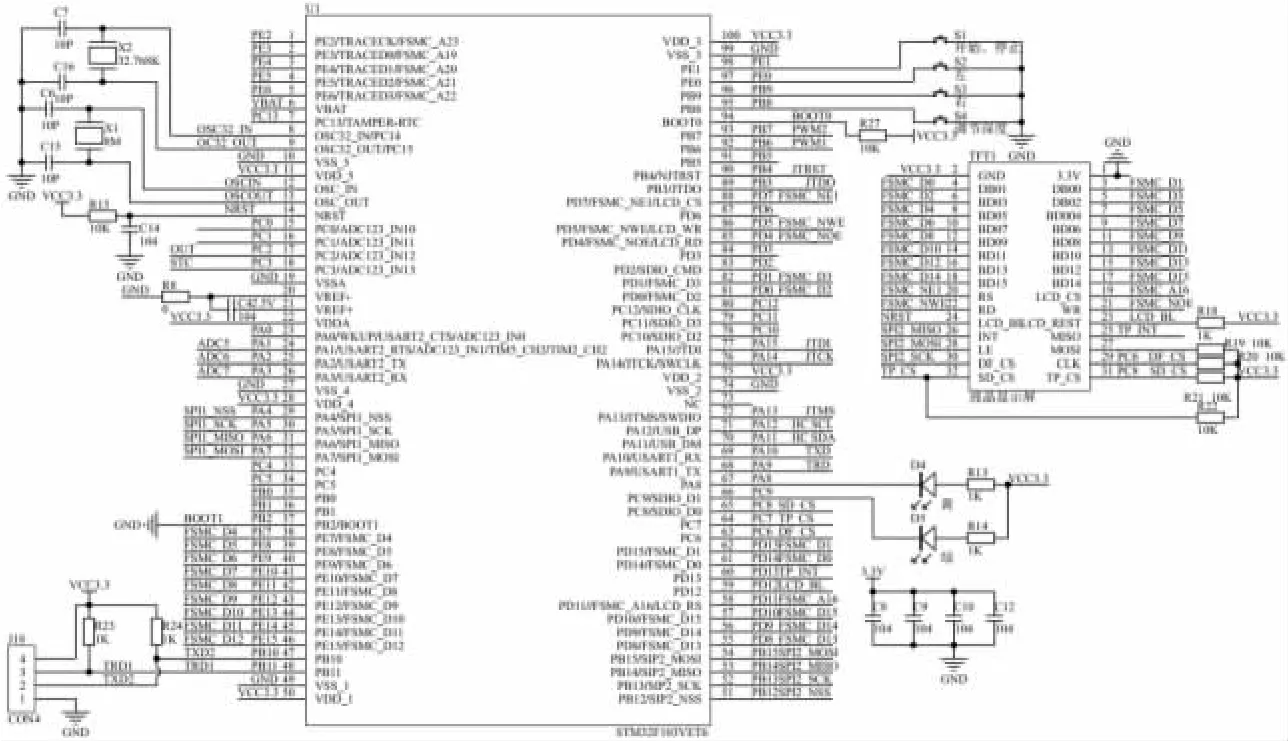
图6 单片机、按键和液晶显示器电路
2.4 辅助电源电路设计
系统使用LM2596芯片构成40VDC转12VDC的电源,电路如图7所示,直流电+40VDC经过C4滤除高频信号后经过LM2596芯片内部自带开关管以固定频率150KHz进行BUCK变换,可以通过调节LM2596芯片第五引脚电压来调节内部开关管开关时间,也就是占空比,实现调节输出电压大小。12 V电压通过 LM7808、M7805和ASM1117-3.3转换为系统所需8、5和3.3 V电压。
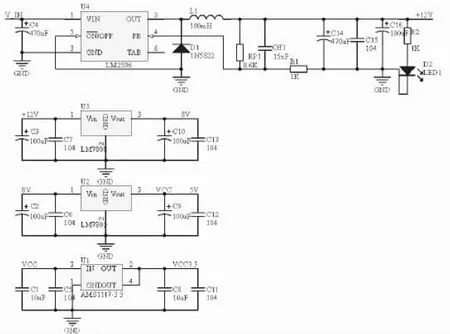
图7 辅助电源电路
2.5 系统软件设计
系统先初始化硬件设备,开始对渔探头回波经过硬件选频、放大、滤波和整流后的脉冲进行采集;采集完数据后直接由单片机进行处理,利用软件算法对回波脉冲进行滤波选频处理后,再进行回波时间计算和角度预估,从而确定目标方位并发送给液晶屏显示。判断是否有界面操作 (如对比度设置和图像设置),若无,返回数据采集处理;若有,执行界面操作后再返回数据采集处理。系统软件设计流程图如图8所示。
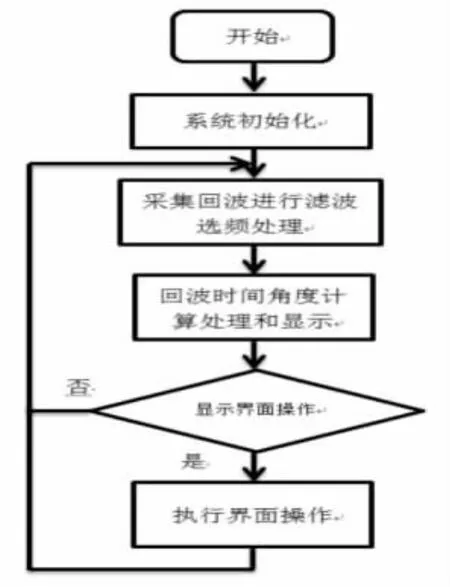
图8 系统软件设计流程图
3 测试结果与讨论
3.1 显示分析
将渔探头放于水中,垂直向下,在渔探头垂直距离5 m处,放置障碍物(模拟鱼群),放置瞬间的鱼探仪显示如图9所示。在渔探头垂直距离10 m处,放置障碍物(模拟鱼群),放置瞬间的鱼探仪显示如图10所示。
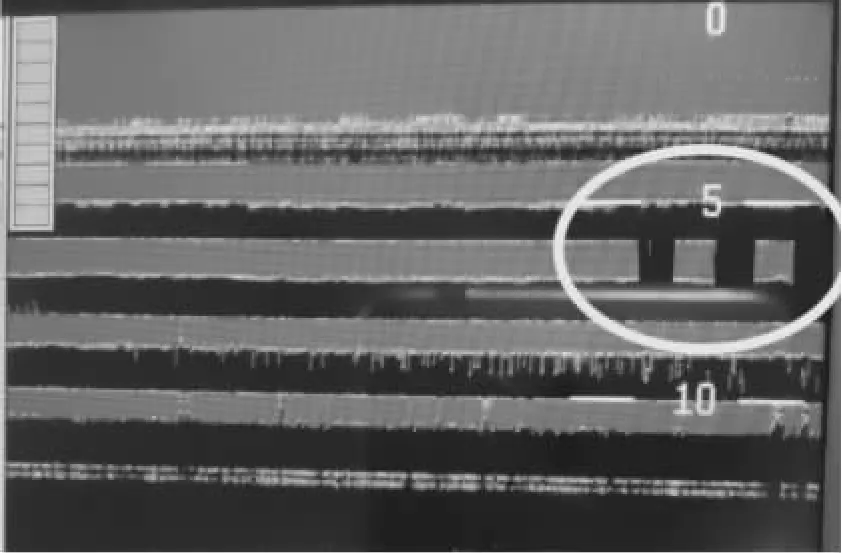
图9 鱼探仪5 m深度有鱼群的显示图
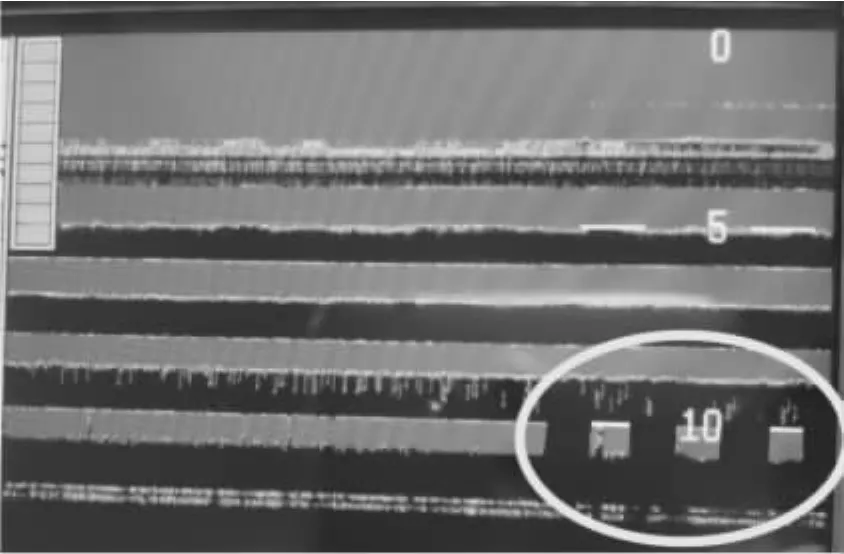
图10 鱼探仪10 m深度有鱼群的显示图
根据图9和图10的鱼群显示图可以看出,回波间断的宽度不同,间断宽度越长,代表鱼群越大,间断宽度越短,代表鱼群越小,图9看出深度5米有三个大小不一的鱼群,图10看出深度10 m有四个大小不一的鱼群。
3.2 探测深度分析
表1为探测深度测试数据,可以看出,探测深度误差小于1.6%,测试精度相对比较高。
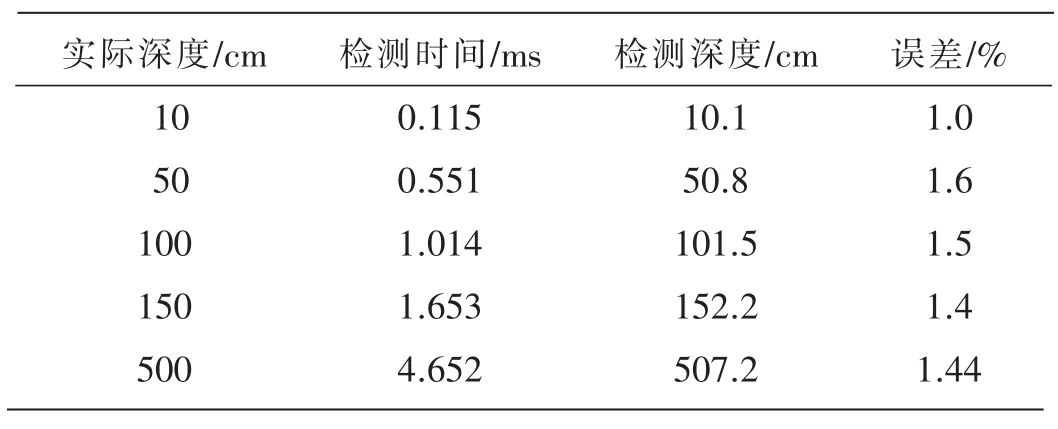
表1 深度测试数据
3.2 发射功率和售价分析
表2为发射数据和售价中,可以看出,本设计渔探仪的发射波输出电压和电流都大于对比产品,也就是输出功率大于对比产品,但售价只有对比产品售价的二分之一,而体积(20 cm×15 cm×12 cm)也小于对比产品的体积(20 cm×17 cm×13 cm)。因此本设计的渔探仪具有高功率、价格低、体积小的特点,也具有性价比高的优势。

表2 发射数据和售价
4 结论
大功率智能渔探仪由74HC4024、HD29026AP芯片和中频变压器构成的超声波发射及接收模块、LM2596电源芯片构成的开关电源模块、STM32单片机处理器模块、液晶显示屏驱动模块和报警提示电路等组成,实现了鱼群探测、判断鱼群大小和显示功能。样机经测试,可对水下不同深度鱼群的状态进行分析和显示,效果良好。该智能渔探仪具有高稳定性和实用性强的优点,作为渔业生产的辅助设备可以提高渔业工作的效益,有良好的应用前景。后续研究将应用增强型多通道换能器阵,进一步提高捕捞准确度和增大搜索鱼群范围,以满足渔业生产的需求。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
液晶与显示(2020年8期)2020-08-08
电子制作(2019年23期)2019-02-23
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
液晶与显示(2015年1期)2015-02-28
