
基于驾驶员反应时间的自动紧急制动避撞策略
2021-01-21 05:29俎兆飞
重庆理工大学学报(自然科学) 2020年12期
郑 刚,俎兆飞,孔 祚
(1.上海应用技术大学,上海 201418;2.上海大丁自动化科技有限公司,上海 200240)
自动紧急制动系统是汽车高级驾驶辅助系统(advanced driving assistance system,ADAS)的重要组成部分。AEBS通过传感器持续监测自身车辆及前方车辆的各项状态参数,判断车辆的危险状况,必要时代替驾驶员进行紧急制动,以避免碰撞。中国新车评价规程(China new car assessment program,C-NCAP)及欧盟新车评价规程(European new car assessment program,EURO-NCAP)等机构相继将AEBS加入新车评价体系之后,AEB系统逐渐成为汽车的标准配置功能。在法规和市场的推动下AEB系统亦成为了汽车主动安全技术的研究热点。
避撞策略是汽车AEB系统的核心,精确且合理的避撞策略对AEB系统能否实现更好的控制效果起着至关重要的作用。国内外学者也对AEB系统避撞策略进行了深入研究。杨为等[1]提出了一种上层模糊控制、下层PID控制的分层行人避撞控制策略。李霖等[2]基于真实交通状况中驾驶员的紧急制动状况提出了一种新的自主紧急制动系统避撞策略。但上述避撞策略驾驶员反应时间采用定值,碰撞时间阈值选取时机原因不明且没有考虑不同驾驶员反应时间对避撞效果造成的影响,避撞策略的控制不够精确。唐阳山等[3]通过采集不同驾驶员的反应时间建立实验,确定了不同驾驶员反应时间对安全距离产生了较大影响。陆建等[4]基于试验车的实验方案,建立不同车速、不同驾驶员的追尾风险模型,确定了不同驾驶员及不同车速追尾碰撞风险不同。张勇刚等[5]综合考虑驾驶员的个性差异,建立不同行驶工况下的最小安全距离模型。姜顺明等[6]基于驾驶员状态识别,建立自动机紧急制动控制策略。但以上控制策略主要从驾驶员的性格、心理方面进行简单分类,分类条件简单且分类界限不明。
本文中从不同驾驶员的基本属性出发,确立正交实验方案,以驾驶员的反应时间为分类依据,通过驾驶模拟器采集各类驾驶员的反应时间,分析确定各驾驶员反应时间与驾驶速度的关系曲线。最终应用聚类分析法对上述各关系曲线进行分类研究,确定驾驶员最终分类。根据不同类别驾驶员反应时间及驾驶速度关系曲线建立AEB系统的风险评估模型和制动压力模糊控制模型,构成了一种较精确、合理的AEB系统避撞控制策略。该控制策略从驾驶员的基本属性出发,充分考虑不同驾驶员反应时间对报警及安全预制的影响,从而有效提高了避撞控制策略的精度,此外制动减速度模糊控制模型自动调节输出的制动压力,一定程度上保证了驾驶员的驾驶舒适度。
1 驾驶员分类
1.1 驾驶员类型正交实验方案
驾驶员反应时间是研究驾驶行为的一项重要参数,而影响驾驶员反应时间的因素有很多[7]。除却一些特殊的不正当驾驶行为及恶劣外部环境外,对驾驶员反应时间产生主要影响的因素是驾驶员的自身影响因素及驾驶速度。驾驶员的基本属性包含了驾驶员的年龄、性别及驾驶经验,这3项因素也是影响驾驶员反应时间的重要因素[8]。
按照上述3种驾驶员的基本属性出发,确立驾驶员的分类。按照国内研究现状,驾驶员年龄可以分为青年(18~30岁)、中年(30~50岁)和中老年(50~70岁);性别分为男性及女性;驾驶经验按照驾龄分为新手司机(2 a及以下)、普通司机(2~5 a)和老司机(5 a以上)。综上可以把驾驶员分为18种类别。但是上述分类种类繁琐且有重复,也不利于进行实验分析。
正交实验法是利用经过专家反复编写的正交实验表来对实验进行整体、综合、统计分析,实现通过少数的实验次数找到较好的实验效果,获得较完全的实验数据的实验方法。针对本次实验可把上述驾驶员分为3因素,混合水平的正交实验。对照正交实验表总结得出9组类型实验方案,如表1所示。
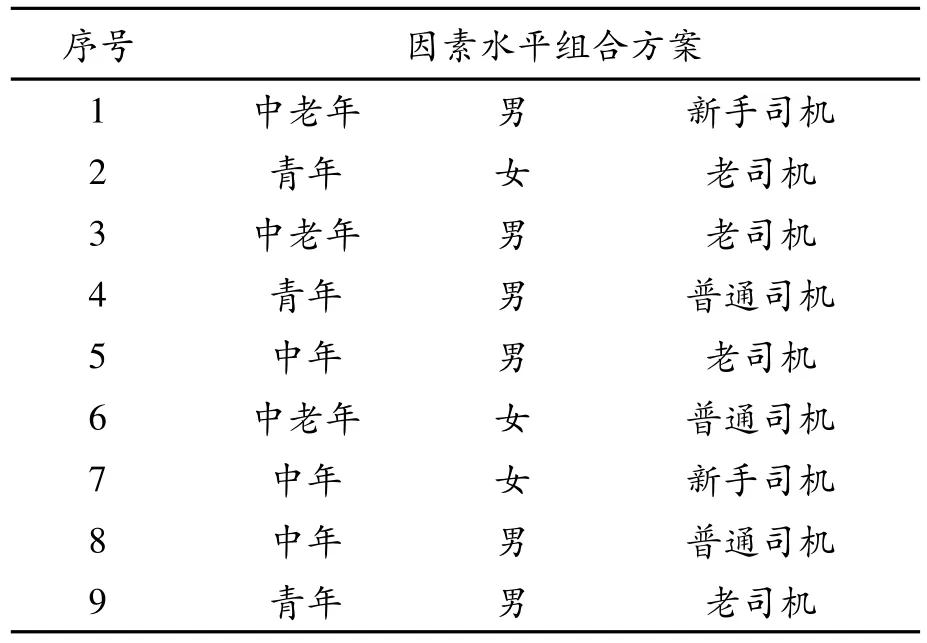
表1 正交实验方案
1.2 驾驶员反应时间数据
驾驶员反应时间的数据收集主要通过驾驶模拟器来完成。针对上述正交实验方案选取90名在校师生进行驾驶员反应时间的采集。数据采集之前首先进行问卷调查,确定驾驶员的各项基本参数按照实验分为9组。
有关资料表明[11],车辆碰撞事故发生次数的峰值车速为48.48 km/h,之后随着车速的增加逐渐减少。因此,本次实验两车相对车速设定在0~60 km/h。为了实验数据的准确性,每位驾驶员开始测试之前熟悉驾驶舱5 min,并记录每位驾驶员在每个测试速度下的5个测试点取平均值。最终对收集的每组测试数据进行线性回归分析,并做出每组数据的拟合关系曲线,其具体的函数表达式如表2所示。其中y为驾驶员的反应时间,x为驾驶员的驾驶速度。图1为第1组实验数据举例,其中y为驾驶员的反应时间,x为驾驶员的驾驶速度。
1.3 驾驶员类型聚类分析
聚类分析法[12]是一组将研究对象分为相对同质的统计分析技术,是将数据分类到由相似对象组成的多个类或者簇的动态过程。聚类分析法的主要步骤为:
1)数据的预处理:选择数量、类型和特征的标度。
2)为衡量数据点间的相似度定义距离函数。
3)聚类分组:将数据对象分到不同的类中(划分法)。
4)评估输出:评估输出结果的质量。

表2 关系函数表达式
由上述9组数据可知,不同驾驶员之间的差异性比较大,驾驶员的反应时间与驾驶速度变化也有关系且同一驾驶员在相同的工况下具有不同的反应时间。因此,利用传统的欧几里得距离算法对驾驶员进行聚类分析,无法满足分类的标准。本文中通过从驾驶员反应时间与驾驶速度之间的函数关系入手,对函数簇进行处理,实现对驾驶员的分类。
由表2的函数曲线表达式可以看出,驾驶员的反应时间与速度之间呈现的是一次函数关系:
式中:y为驾驶员反应时间;x为驾驶速度。
利用斜率与截距代表一次函数,则有:
式中:a为斜率;b为截距。
因此,改进的欧几里得距离可以重新被定义为:
则新定义的聚类欧几里得距离为:
式中:di为第i个样本指标的欧几里得距离;n为n个样本;ai为第i个一次函数斜率;am为第m个一次函数斜率;bi为第i个一次函数截距;bm为第m个一次函数截距。
新定义的距离越小,说明2个指标越接近,在精度满足的情况下可以把其归为同一类。具体聚类流程如图2所示。最终分类结果如表3所示。
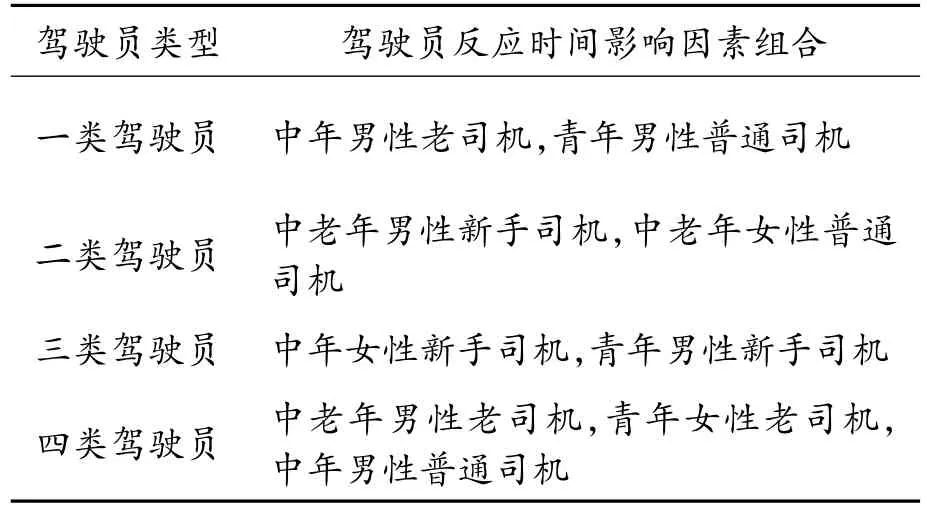
表3 驾驶员分类
最终把驾驶员分为4类,每类驾驶员之间的欧几里得距离矩阵为:
由上述距离矩阵可知,各类驾驶员呈现明显的差异性,分类较理想。根据上述分类整理测试数据最终得到每类驾驶员的反应时间与驾驶速度之间的函数曲线及关系式,函数曲线如图3所示。
关系式为:
式中:T1~T4为每类驾驶员在不同驾驶速度下的反应时间;v为驾驶速度;R2为拟合曲线的线性回归决定系数。
2 风险评估模型设计
2.1 报警及制动阈值设定
目前比较常见的有2种AEB系统的风险评估模型[13]:一种是通过分析本车与目标车之间的制动过程,设定相应的安全预碰撞距离阈值。当本车与目标车之间的距离小于设定的安全阈值时,开始进行紧急制动,称为安全距离模型。另一种是计算本车和目标车之间的碰撞时间(TTC),设置相应的碰撞时间阈值。当两车的碰撞时间低于设定的碰撞阈值时开始制动,称为安全时间模型。
在驾驶过程中,驾驶员对碰撞时间的感受会比碰撞距离的感受更直观,因此,采用安全时间的风险评估模型。传统的考虑前后车相对加速度的改进2阶TTC计算公式为:
式中:vrel表示本车和目标车的相对速度;x表示两车相对距离;arel表示两车的相对加速度。TTC阈值是指AEB系统判断将要发生碰撞时采取制动的时刻的TTC的值,TTC阈值决定了AEB系统的报警及制动时机,是整个风险评估模型的核心。研究表明:TTC阈值的设定与驾驶员的反应时间以及汽车的制动间隙时间有关。由于同类型汽车的制动间隙时间大体相同,故此本文中认为TTC阈值的设定与驾驶员的反应时间有直接关系。
由4类驾驶员反应时间和驾驶速度之间的关系可得:
式中:TTC1~TTC4为4类驾驶员的TTC制动阈值,即为当前车速下的驾驶员反应时间加上制动间隙时间及液压延迟时间。v为当前的驾驶速度(m/s)。t0为制动间隙时间和液压迟滞时间,取0.2 s。考虑到驾驶员在接收到报警信号(声光)时,需要一定的反应时间来进行制动,考虑设定2倍的当前驾驶速度下的驾驶员反应时间为AEB系统的报警阈值。TTC报警及制动阈值是随着驾驶员及驾驶速度变化而变化的,因此不同驾驶员及同类型驾驶员在不同车速下选取了不同的TTC报警及制动阈值,充分考虑了不同驾驶员的个性特点,使报警及制动时机的选择更精确、合理。
驾驶速度设定方面,风险评估模型与实验所得的驾驶员反应时间及驾驶速度函数关系曲线保持一致,采用0~60 km/h的相对速度设定。
2.2 分级报警制动系统
本文中所述的AEBS预警系统根据TTC的数值对个各工况下的行车安全程度进行3等级的安全等级划分。
Ⅰ级为正常行驶级别:正常行驶时AEBS预警系统发出信号值为0,处于正常行驶级别,此时预警系统无报警,无制动。
Ⅱ级为碰撞预警级别:当传感器探测到自身车辆与同车道前方行驶车辆之间的碰撞时间TTC,达到2倍当时车速下的驾驶员反应时间时,AEBS预警系统发出报警信号值为1,提醒驾驶员减速制动。
Ⅲ级为危险制动级别:当传感器检测到两车的碰撞时间TTC达到TTC制动阈值且驾驶员无制动动作时,AEBS报警系统发出报警信号值为2,此时AEBS制动系统自动参与制动,当车辆成功刹停或发生碰撞时报警信号重新减为0。
3 AEBS模糊控制系统
3.1 AEB系统工作流程
图4为整个AEB系统的工作流程:行车状态识别模型检测自身车辆和目标车辆的行驶参数,通过风险评估模型计算本车的报警及制动阈值,报警及制动信号和两车的行驶参数发送模糊控制系统,输出期望的制动减速度。
3.2 AEBS模糊控制器设计
本文中所述AEBS模糊控制器是以自身车辆和目标车辆的相对速度(km/h),以及两车纵向的相对距离(m)为输入,以制动时系统输出的制动减速度a(m/s2)为输出的双输入单输出模糊控制。其中模糊控制器的输入输出语言变量按照N6(正大)~N1(正小),P6(正大)~P1(正小),Z6(正大)~Z1(正小),Z0(零),N0(零),P0(零)来划分。详细语言变量描述如表4所示。
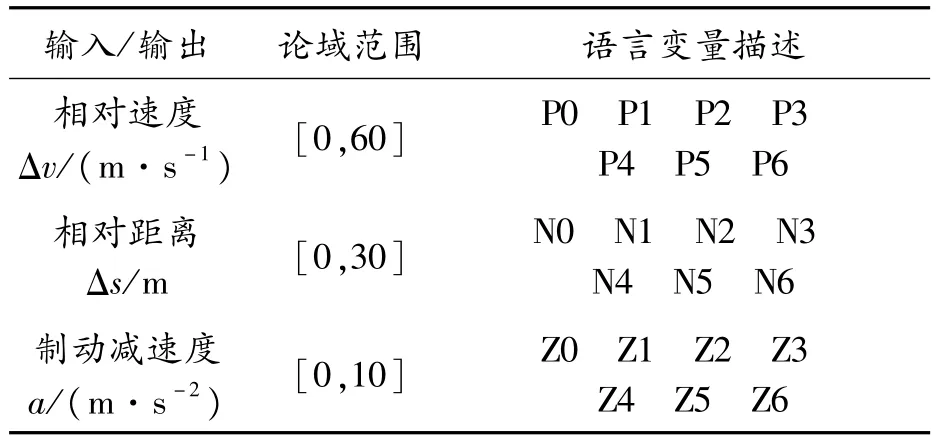
表4 输入输出语言变量
整个模糊控制器输入输出函数为高斯函数,模糊关系法则为Mamdani,解模糊方法为重心法。图5~8为本模糊控制器的输入输出隶属度函数及输入输出变量曲面。
当本车和目标车制动结束,两车静止或者相对速度为0时,两车之间需要留出一定的安全距离,称为最小安全距离。而在国内外对AEB系统的安全距离模型的研究中,一般将最小安全距离在2~5 m之间取一个固定值。本文中考虑到不同类型驾驶员的特异性差异,不同类型驾驶员设定的最小安全距离略有不同,设定为1.4~2.5 m,并通过一定数量的驾驶模拟器仿真试验,得出不同相对速度及相对位移下需要的制动减速度数据50组。在实验所得的数据的基础上充分考虑驾驶员的驾驶舒适性,构建AEBS模糊控制器的模糊规则,部分模糊规则如表5所示。
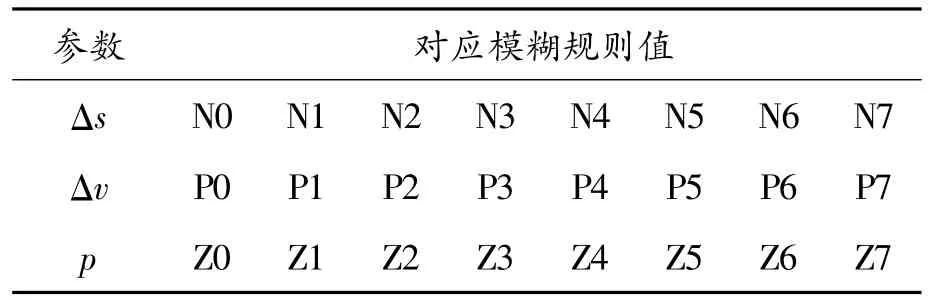
表5 部分模糊规则
4 仿真及结果分析
4.1 AEB系统仿真
AEB系统收集本车及前车的姿态信息(速度、加速度等)计算碰撞时间TTC,并进行风险评估,之后通过模糊控制器输出期望的制动减速度,对本车进行制动减速。根据AEB系统的工作流程,车辆的动力学模型以及所设计的模糊控制器,建立CarSim和Simulink联合仿真模型,如图9所示。
整个模型包含整车模型、数值计算模型、风险评估模型,以及模糊控制模型,其中整车模型根据某款量产车辆的真实数据,通过CarSim软件建立,包含了该车的动力学模型制动系统、转向系统等。数值计算模型主要负责收集自身车辆及目标车辆的姿态信息,计算两车的碰撞时间TTC。风险评估模型根据不同类型驾驶员的个性特点及不同速度计算相应的反应时间,进而计算AEB系统的报警及制动阈值,并发出报警信号及制动请求。当接收到制动请求之后,模糊控制模块根据两车的相对位移及相对速度输入及模糊规则输出期望的制动减速度,车身动力学模型接收发出的期望制动减速度,完成车身制动。
4.2 C-NCAP-CCRs测试工况
C-NCAP的CCRs测试工况包含CCRs-20 km/h、CCRs-30 km/h、CCRs-40 km/h三组测试场景,即要求自身车辆(SV)及目标车辆(POV)在规定行驶路径上,POV静止,SV分别以20、30、40 km/h的速度行驶。
4.3 仿真结果分析
图10~11为AEB系统按照C-NCAP法规要求进行仿真分析的结果举例。
图10为4类驾驶员在CCRs-20km/h测试场景下两车的相对位移、相对速度、自身车辆的减速度以及报警信号的变化曲线。
以第1类驾驶员为例,在20 km/h的速度下,其报警TTC阈值为3,持续报警时间为1.5 s。由图10(d)可知,车辆在2.48 s处触发报警,AEBS的TTC报警值变为1,持续报警1.5 s之后在3.98 s时达到制动TTC阈值,报警值变为2,最终车辆在6.58 s处成功制动,报警值变为0。整个AEBS预警系统报警信号输出准确,持续。由图10(c)可知,自身车辆在制动开始时,模糊控制器输出制动减速度较为平缓,车辆的减速度控制在0~3 m/s2。
测试结果表明:所建立的AEBS系统对于相同速度下的不同驾驶员的不同反应时间做出了很好的区分,充分考虑到了不同驾驶员的特异性差异。且模糊控制器输出的制动减速度较为平缓,虽然在制动的过程中有较小的峰值,但是持续时间较短,总体制动效果较好。
以第4类驾驶员为例分别测试了其在CCRs-20 km/h、CCRs-30 km/h、CCRs-40 km/h场景下的相对位移、相对速度、制动减速度及报警信号,如图11所示。在图11中,所设计的AEBS系统能够根据驾驶员的不同行车速度自动调节TTC报警及制动阈值,及制动减速度的大小,使制动安全距离保持在预期的安全距离内。在充分考虑不同速度对驾驶员反应时间的影响的同时,也保证了驾驶员及乘客的安全。
分析各个测试工况的仿真结果,该AEBS系统不同类型的驾驶员在制动完成时,与前车之间的车头距离保持在0.8~2.8 m,该车头距离在保证驾驶员及乘客安全性的前提下充分满足了不同驾驶员对最小制动安全距离的需求;各个测试场景下,制动时的行车减速度控制在1~7 m/s2,且减速度曲线较为平滑,驾驶员及乘客的舒适性较高。采用的双TTC阈值报警策略,比较符合不同类型驾驶员的报警需求,且报警曲线准确持续,无误报漏报。
5 结论
所建立的TTC风险评估模型能够准确地针对不同驾驶员的个性特点设定不同的报警阈值及制动阈值,准确地发出报警信号及制动信号,无漏报警和误报警发生。所设计的模糊控制器能够在保证安全的前提下尽可能地调整制动减速度的输出,且减速度曲线较顺滑,一定程度上提高了驾驶员的驾驶舒适性及对系统的认可度。综上,所设计的AEB系统可以很好地满足不同驾驶员对系统的控制需求,对AEB系统开发设计有参考意义。
但是由于经费和调查难度的原因,本课题的实验数据均来自本校师生,因此选择的驾驶员样本典型性不够明显,种类较为单一,所得出的不同类型驾驶员反应时间的代表性及普遍性不够突出。并且由于本课题的实验数据获取途径来源于驾驶模拟器,在数据的准确性和全面性上有一定的误差,因此每类驾驶员和驾驶速度之间的关系曲线精确度略低。此外本文中所述的控制算法处于模型开发阶段,下一步可以把模型生成为控制代码,写入控制硬件,进而搭建AEB控制器的硬件在环测试系统,对系统进行进一步的算法验证。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
科学与财富(2021年33期)2021-05-10
临床骨科杂志(2020年1期)2020-12-12
智能计算机与应用(2020年4期)2020-08-31
汽车零部件(2018年5期)2018-06-13
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年2期)2015-02-28
