基于奖励高速路网络的多智能体强化学习中的全局信用分配算法
2021-01-21 03:22姚兴虎谭晓阳
计算机应用 2021年1期
姚兴虎,谭晓阳*
(1.南京航空航天大学计算机科学与技术学院,南京 211106;2.模式分析与机器智能工业和信息化部重点实验室(南京航空航天大学),南京 211106;3.南京航空航天大学软件新技术与产业化协同创新中心,南京 211106)
0 引言
近年来,深度强化学习在游戏人工智能[1-2]、机器人自动控制[3]等领域取得了很大的进步。然而,许多现实世界的真实场景需要多个智能体在同一个环境中与环境进行交互,这类问题场景可以建模为多智能体系统[4-5]。常见的多智能体系统包括多智能体协同规划[6]、信号灯的控制[7]以及多玩家电子游戏[8]等。然而,多智能体系统的复杂性使得多智能体系统面临着诸多单智能体系统中没有的问题,这些问题使得简单地将单智能体强化学习算法移植到多智能体场景中不会取得令人满意的效果。具体来说,多智能体系统中面临的主要问题包括:每个智能体只能观测到环境的一部分所导致的对环境的部分可观测问题[9];环境本身所具有的更强的非马尔可夫性[10];多个智能体与环境进行不断的交互所导致的环境不稳定问题[11];多个智能体的联合动作空间随着智能体数量的增加所导致的指数爆炸[12-15];以及如何将环境反馈的针对环境中所有智能体联合动作的全局奖励分配给每个独立的智能体(称之为全局信用分配问题)[12-15]。这些问题的存在不仅使得无法将所有的智能体建模为一个单智能体然后利用单智能体算法进行训练,而且也不适合将其他智能体看成环境的一部分从而为每个智能体单独进行建模。
近年来,由于概念上简单并且执行效率高,“中心训练-分散执行”的方式已经成为求解多智能体强化学习问题的一个标准范式[12-15]。所谓“中心训练”,指的是在训练的过程中通过一个中心化的值函数来与环境直接进行交互;所谓“分散执行”,指的是每个智能体都有自己单独的值函数网络或者策略网络,因此在执行阶段每个智能体可以根据其自身的观测独立地执行动作。在这一范式中,中心化的值函数直接接收环境给出的奖励信号,之后通过适当的全局信用分配机制将全局奖励分配到每个智能体。因此,中心化的值函数建立了每个智能体与环境进行交互的桥梁并在整个框架中处于核心地位。
如何设计中心化值函数与每个智能体的值函数之间的约束关系是设计整个信用分配机制的核心。一个合适的约束关系不仅能够有利于对全局信用进行一个良好的分配,还应使得整个算法复杂度不易过高。若采用简单的信用分配机制(比如“值分解网络(Value decompose network,Vdn)[13]”中的加性方式),则会限制中心化值函数的表达能力并进一步影响到奖励分配过程;若设计复杂的奖励分配机制(比如“反直觉的多智能体策略梯度法(Counterfactual multi-agent policy gradient,Coma[12])”和“Q 值变换网络(QTRAN[15])”)则会增加优化求解的复杂度。
此外,Vdn[13]、QMIX[14]以及QTRAN[15]算法均假设全局最优的联合动作等价于每个智能体按照自己的值函数求得的局部最优动作的联合。然而,复杂场景下的全局最优动作可能需要某些智能体做出一些牺牲其个人利益的行为;因而,基于这一假设的算法最终会收敛到问题的一个局部最优解。
针对多智能体强化学习问题中全局信用分配机制存在的上述问题,在“中心训练-分散执行”的框架下,本文提出了一种新的全局信用分配方法,称之为奖励高速路网络(Reward HighWay Network,RHWNet)。RHWNet将中心化值函数与每个智能体的值函数之间的耦合分为两部分:一方面通过混合网络来实现全局的奖励分配,这一方式能够对不同的智能体进行特异性的奖励分配;另一方面利用奖励高速路连接将全局奖励信号桥接到每个智能体值函数的训练过程中,从而实现全局信用的二次分配,这将使得单个智能体在最大化自身奖励值的同时兼顾其行为对全局奖励的影响。在算法复杂度方面,本文所提出的全局信用的二次分配过程几乎不需要额外的优化代价。在星际争霸微操作平台上的实验结果表明:本文方法在多个复杂的场景下能够获得很好的测试胜率提升,并且具有更高的样本利用效率。
1 相关工作
近年来,随着深度强化学习方法的流行,多智能体强化学习算法的研究已从简单的环境过渡到复杂的场景。
“中心训练-分散执行”一类的算法通常假设每个智能体的局部最优动作的拼接等价于联合的最优动作。其中代表性的方法有:Coma[12]、Vdn[13]、QMIX[14]和QTRAN[15]。Coma 是一种同策略的“演员-评论家”算法,通过一个精心设计的反直觉的基准来实现全局信用的分配,但是这一基准需要额外的计算代价。Vdn、QMIX 和QTRAN 则是利用值函数迭代的方式,首先学习中心化的值函数,然后利用中心化值函数与非中心化值函数之间的约束关系完成全局信用的分配。值函数之间不同程度的约束关系使得Vdn、QMIX 和QTRAN 三种方法的信用分配机制的复杂程度和优化求解难度有所不同。SMIX(λ)[16]旨在学习一个更为灵活和更强泛化能力的中心化值函数结构,未改变原有算法的奖励分配机制。
本文所提出的基于奖励高速路网络的信用分配机制同样属于“中心训练-分散执行”的框架,但是其重点在于如何在不引入额外的信息以及不增加优化代价的前提下进行更为有效的信用分配。
此外,为智能体之间建立通信信道或者建立智能体之间的协调配合机制可以为单个智能体的决策提供更多的环境信息或者环境中其他智能体的信息。建立通信信道的方法主要包括文献[17-18]等;智能体之间的协调配合机制可以通过在智能体之间引入注意力机制[19-20]或者利用图神经网络[21-22]来实现。每个智能体利用更多的信息进行决策所产生的行为将会间接影响到整个系统的奖励分配。而本文所提出的方法在不考虑更多信息的条件下改善已有的信用分配机制。因此,这类方法与本文所提出的方法是互补的。
2 背景知识
在本章中将介绍多智能体强化学习的相关背景知识。其中:2.1 节给出了多智能体强化学习的相关符号与问题建模;2.2 节介绍了本文所提算法的值函数的基本形式——深度循环Q 函数网络(Deep Recurrent Q Network,DRQN)[23];2.3 节介绍了3 种流行的基于值函数迭代的多智能体强化学习算法——Vdn[13]、QMIX[14]和QTRAN[15]。
2.1 问题建立
本文考虑完全合作场景下的多智能体强化学习问题,它可被描述为非中心化部分可观测马尔可夫决策过程(Decentralized Partial Observable Markov Decision Process,Dec-POMDP)[24]的一个变种。具体来说,本文可以用八元组来描述这一问题,其中s∈S表示环境的真实状态,A是每个智能体的所能采取的动作的集合。其中智能体的数目的总数是N,γ是奖励折扣因子。在每个时刻,每个智能体i∈{1,2,…,N}分别选取动作ai∈A从而拼成联合动作向量a={a1,a2,…,aN}∈AN。本文考虑一个部分可观测的场景,其中每个智能体i只能通过观测函数Z(s,i):S×N↦O得到部分信息o∈O。每个智能体i历史的观测和动作序列为τi∈T≡(O×A)*。每个智能体将依据历史的观测和动作序列τ来进行决策。策略函数可分为静态策略函数和随机策略函数,其中随机策略函数可以定义为:π[a|τ]:T×A↦[0,1]。
在“中心训练-分散执行”的框架下,训练阶段利用环境的全局状态s和各个智能体的历史观测信息τ={τ1,τ2,…,τN}学习一个中心化的动作值函数Q([s,τ],a)(简记为Q(τ,a))。在执行阶段,每个智能体的策略函数πi仅仅依赖于其自身的观测和动作历史序列τi。所有智能体的共同目标是最大化所能从环境中得到的全局折扣奖励和:在下文中,为了简化记号,本文用黑体字符表示所有智能体的联合行为,并且在不引起歧义的情况下,省略每个智能体的序号i。
2.2 深度循环Q网络
在复杂的现实世界中的问题场景下,通常不能得到完整的状态信息并且观测的数据往往是具有噪声的,这种部分可观测的问题在多智能体场景下更为严重。此外,多智能体环境所天然具有的非马尔可夫性使得每个智能体需要考虑更多的历史信息来进行当前时刻的决策。文献[23]的结果表明,传统的深度Q 网络在处理部分可观测的马尔可夫决策过程(Markov Decision Process,MDP)问题中会出现性能下降,而深度循环Q网络更为适合处理部分可观测以及非马尔可夫的环境。
深度循环Q 网络通过引入GRU(Gated Recurrent Unit)[25]或者长短期记忆(Long Short-Term Memory,LSTM)网络[26]等循环神经网络结构来实现对历史信息的融合从而计算状态动作值。一方面,多智能体环境面临更严重的部分可观测性,采用这一循环神经网络结构能够更好地对历史信息进行融合,从而缓解对环境的部分可观测问题。另一方面,序列决策问题中当前的策略可能受到之前多步的状态和动作的影响,因此这一循环神经网络结构还能有助于处理序列决策问题场景下的非马尔可夫问题。与深度Q网络[1]相同,DRQN[23]也利用一个数据缓存区(replay buffer)来存储经验数据其中τ′是在联合的局部观测τ下智能体采取联合动作a后获得全局奖励值r所得到的下一个联合观测值。DRQN 通过最小化如下的均方时间差分损失来进行学习:
其中θ是值函数网络的参数。θ-是目标网络(target network)的参数,其更新方式为每隔固定的迭代次数将主网络的参数θ直接复制。
2.3 Vdn,QMIX和QTRAN
多智能体系统中联合的动作空间随着智能体数量的增加指数爆炸,因此直接优化联合的动作值函数代价巨大。为了降低算法的复杂度,众多算法假设智能体的联合最优动作等价于每个智能体依据其自身的值函数进行贪心的动作选择所得到的局部最优值的拼接,即:

值函数分解网络(Vdn)[13]限制中心化的值函数Qtot(τ,a)为每个智能体的值函数的和,即:

Vdn 算法的损失函数和(1)相同,这一方法的优势在于其结构简单,但是这一简单的结构限制了中心化值函数的表达能力和全局信用分配的有效性。QMIX[14]将这一线性分解拓展到了单调非线性分解。具体来说,QMIX假设中心化的值函数是每个智能体值函数的非负线性组合,即:

QMIX算法通过建立每个智能体的值函数网络,一个混合网络和一系列的超网络来实现上述约束,并且QMIX 算法在超网络中输入全局的状态来辅助中心化值函数的训练。
Vdn 和QMIX 算法的约束都是假设(2)的一个充分条件,QTRAN[15]算法则进一步对约束进行松弛从而直接优化假设(2)的一个充要条件。尽管QTRAN 工作在一个更大的假设空间,但是这一方法需要求解联合动作空间中的优化问题,这将带来庞大的计算代价,因此QTRAN 并不适用于复杂的多智能体场景。
3 本文方法
3.1 奖励高速路连接
残差网络[27]通过在深度神经网络中增加跳跃连接来缓解深度神经网络在信息传递的过程中所造成的信息丢失与损耗。高速路网络则是利用门控机制,将当前的信息选择性地进行传递。本文利用残差学习的观点,将每个智能体应分到的奖励分为两部分:贪心奖励和合作奖励。所谓贪心奖励是指按照假设(2)进行信用分配所分给每个智能体的奖励,记作rg,仅仅采用这种分配方式将使得每个智能体依据其自身的值函数进行贪心的策略选择;所谓合作奖励指的是每个智能体还应考虑的全局奖励部分,记作rc。rc可通过对全局奖励R进行部分桥接得到,即rc=λ·R,λ∈[0,1]。本文称这种全局奖励直达的连接方式为奖励高速路连接。经过这两种形式的奖励分配后,训练过程中单个智能体i的实际收到的奖励信号为记环境所给的外部奖励为R,则在一个有N个智能体的多智能体环境中,rg,rc与R之间的关系为:

其中F为满足假设(2)所进行的全局信用分配函数,它可以是简单的所有贪心奖励rg的和(对应于Vdn),或者是所有rg的非负组合(对应于QMIX)。上述二路的奖励分配方式及其与残差网络的结构对比可以用图1来描述。
从图1 可以看出,残差连接[27]和奖励高速路连接均是在深度网络中添加一些跳过某些中间层的跳跃连接。这种跳跃连接的方式几乎不会带来额外的优化代价,但更多的信息将通过跳跃连接进行传递。两种结构不同之处在于:残差连接的信息流向是从前往后的,这样上一阶段的信息能够对后续阶段产生影响;而奖励分配的方式是从后往前的,这将使得两路奖励信号都被用来训练每个智能体的值函数网络,从而使得单独的智能体在考虑最优化其自身的利益的同时最大化全局奖励值。
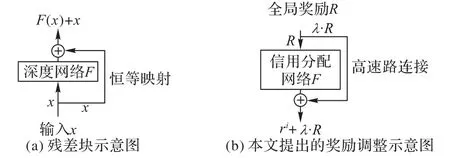
图1 残差连接和奖励高速路连接对比Fig.1 Comparison of residual connection and reward highway connection
3.2 本文所提算法
本文采用QMIX 的网络结构作为本文算法的基本网络结构。QMIX 采用混合网络和一系列的超网络来构造信用分配网络F。每个超网络接受全局状态作为输入,输出的非负值作为混合网络的权重。本文称在这一信用分配网络F上加入奖励高速路连接所得到的网络为奖励高速路网络(RHWNet)。RHWNet的示意图如图2所示,与QMIX 相同,在每个智能体单独的值函数网络中加入GRU 来实现对历史信息的利用,并且所有智能体的值函数网络是参数共享的。通过图2 可以看出,奖励高速路连接并不会引入额外的神经网络参数,因此RHWNet并没有额外的优化代价。
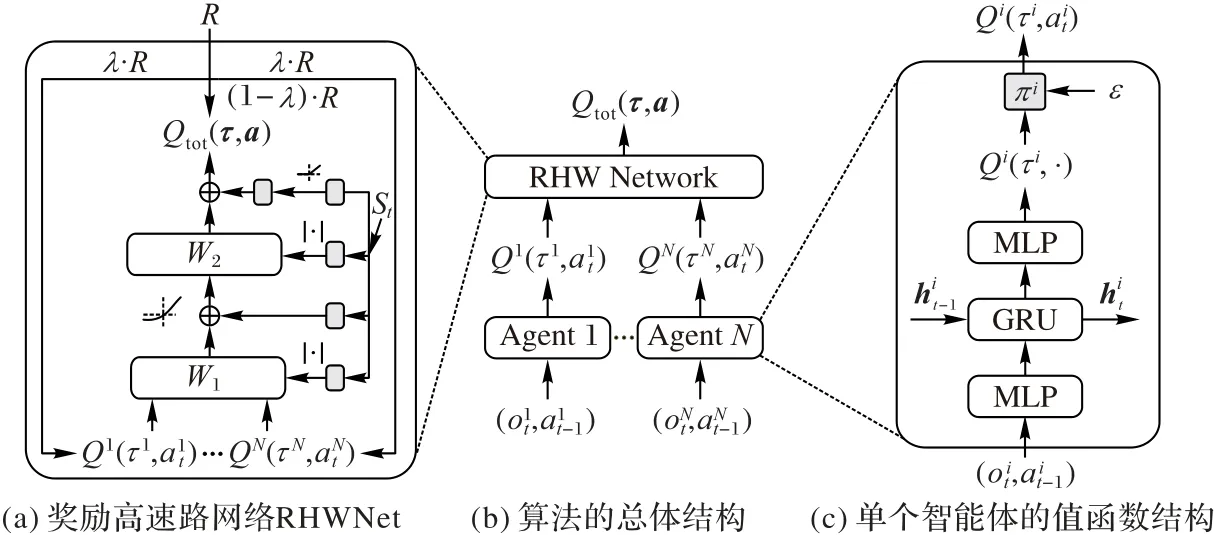
图2 本文所提算法的网络结构Fig.2 Network structure of the proposed algorithm
在实现过程中,本文算法通过最小化如下的损失函数进行端到端的训练:
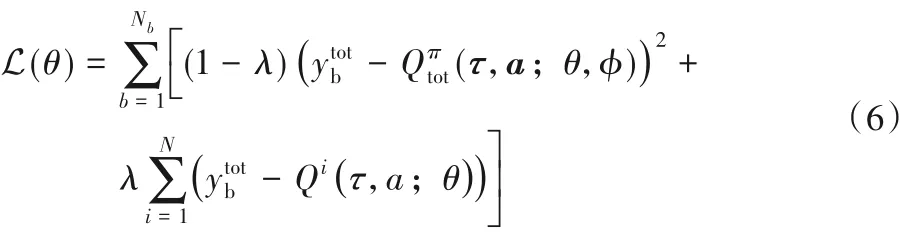
其中:Nb为采样批量(batch)的大小,λ为将全局奖励通过奖励高速路网络输送到每个智能体上的权重,θ为所有智能体非中心化的值函数网络的参数,φ为奖励高速路网络的参数,其中γ是奖励折扣因子,θ-、φ-是与标准的深度Q 学习算法中相同的目标网络(target network)的参数。所有的神经网络都是通过端到端的方式进行训练的。
4 实验与结果
本章首先给出本文所提算法的实验环境和算法的实现细节,然后给出实验结果和消融分析。
4.1 实验环境
本文在星际争霸多智能体挑战(StarCraft Multi-Agent Challenge,SMAC)[28]环境上对本文所提的RHWNet 进行评估。SMAC 是基于星际争霸Ⅱ游戏的一个实验环境,与完整的星际争霸Ⅱ游戏相比,SMAC 侧重研究每个智能体的微操作。微操作指的是SMAC 重点关注如何控制每个士兵去战胜敌方,而不考虑如何发展经济以及进行资源的调度等高层次的宏观操作。
SMAC 提供了多种复杂的微操作场景来探究智能体之间的合作行为。在每个场景中,开始时刻两组敌对的士兵被分配到战场中的随机位置。战场中的每个士兵只能在其视野范围内搜集到关于战场环境的局部信息,这将带来严重的对环境的部分可观测性。环境仅根据智能体所采取的联合动作来给出一个全局的奖励信号。本文采用强化学习算法来控制战场中的一组士兵(同盟单元),来与内置的基于启发式规则的游戏AI控制的另一组士兵进行对抗。在实验中,内置AI的难度被设置为“非常困难”来验证本文算法的有效性。
本文所提算法旨在优化合作场景下的全局奖励分配问题。因此重点考虑非对称(asymmetic)场景(敌我双方士兵构成不同)以及非齐次且对称(heterogeneous and symmetic)场景下(敌我双方士兵人员组成相同,但均由不同种类的士兵构成)的对抗。表1列出了实验所考虑的4种实验场景。

表1 实验中所考虑的不同场景Tab.1 Scenarios considered in experiments
4.2 实现细节
每个智能体的值函数网络由以下结构构成:首先从环境中得到的观测传入一层维度为64 维的全连接层,经过ReLU[29]激活函数后,输入到维度为64 的GRU 模块进行当前信息与历史信息的整合,GRU 模块的输出传入到一层维度为64 的全连接层,之后再经过ReLU 激活函数得到当前智能体的动作值向量Qi(τi,·)。然后根据这一动作值函数进行ε-贪心的策略选择,随着训练的进行,ε的取值从1.0 线性衰减到0.05。为了降低网络的参数数量,所有智能体共享同一个动作值函数网络。
之后每个智能体的Q 值传入奖励高速路网络,奖励高速路网络中的混合网络部分采用与QMIX 算法相同的结构。全局奖励值经过高速路传输的多少由式(6)中的λ参数控制,在本文的所有实验场景中本文均设置λ=0.2。
本文采用RMSprop方法来最小化损失函数(6),其参数设置为:lr=0.000 5,α=0.99,奖励折扣因子γ=0.99。每经过200局游戏对目标网络的参数进行一次更新。
4.3 主要实验结果
本文将所提算法与SMAC 平台上较先进的算法Coma 和QMIX进行对比,并与不进行全局信用分配的独立Q学习算法(Independent Q learning,Iql)和只进行简单全局信用分配的Vdn算法进行对比,主要实验结果如图3所示。本文将每个算法在所有不同的场景中均独立训练10 次,得到的线条和阴影部分分别表示平均测试胜率及对应胜率方差的95%的置信区间。阴影部分的面积大小可以作为衡量算法稳定性和鲁棒性的评价指标,阴影面积越小意味着算法的性能方差越小从而算法的稳定性和鲁棒性越好。
可以看到,在所有的非齐次对称场景下(3s5z,1c3s5z,3s6z),本文提出的算法能够取得最优的性能,并且在较为简单的场景(2s_vs_1sc)下也能获得接近最优的性能。此外RHWNet 的性能提升不仅体现在最终的胜率上,还体现在学习的效率上。
具体来说,在智能体数量较少的2s_vs_1sc 场景下,本文可以看出采用较为复杂奖励分配机制的QMIX 性能要明显差于结构更简单的Vdn和Iql算法。这意味着QMIX这一较为复杂的全局信用分配机制在某些较为简单的场景下也有可能失效。而通过奖励高速路连接之后,RHWNet 算法在这一场景下得到了很大的性能提升。

图3 本文算法与其他算法在4个场景下的测试胜率对比Fig.3 Test winning rate comparison of the proposed algorithm and other algorithms
在1c3s5z 场景下,每个团队中都有3 种不同类型的智能体。如图3(c)所示,在这一场景下,QMIX 和Vdn 算法性能都出现了较大的波动(对应的阴影部分面积增大)。而RHWNet在取得性能提升的同时还具有更小的性能上的方差,这意味着RHWNet在复杂的问题场景下依然具有很好的鲁棒性。
在3s5z 场景下,本文可以看到采用更为复杂奖励分配方式的QMIX 算法性能要大大优于采用简单信用分配方式的Vdn 算法以及不进行信用分配的Iql 算法。尤其需要指出的是,Vdn 算法可看作QMIX 算法的简化版本,这意味着在这一复杂的场景下,QMIX所采用的更复杂的结构更有效。然而这些基准算法都存在样本利用率低、学习速度慢的问题,而RHWNet 则能大大提高算法的学习速度和样本利用的效率。同样的结果可以在更为复杂的3s6z场景下得到。在3s6z场景中,Coma、Vdn 和Iql 的训练基本无效,QMIX 也不能得到令人满意的结果;而RHWNet 在仅需要QMIX 算法所需样本数量的1/3 的情形下,最终胜率能达到QMIX 算法的1.5 倍。这表明在3s6z 这一智能体数量和种类较多的复杂场景下,已有算法的奖励分配机制不能有效地进行全局奖励分配,而奖励高速路连接为这种复杂场景引入了一个更好的奖励分配机制,从而取得了最终性能和样本效率的提升。
4.4 消融测试
在这一部分本文重点探究通过奖励高速路网络传递的全局奖励的比例对最终的实验性能所产生的影响。式(6)中参数λ的作用其实起到了平衡原有的端到端的奖励分配方式和直接利用全局奖励的作用。当式(6)中的λ取值较小时,每个智能体所获得的奖励信号更多地来源于直接的全局奖励;当λ取值较大时,每个智能体的奖励信号则更多地来源于混合网络的信用分配结果。
图4显示了在3s5z场景下,λ的不同取值所获得的实验结果。其中实线和阴影表示独立进行10 次实验的均值和95%的置信区间。从这一实验结果可以看出,当λ=0.2,0.4,0.6时,RHWNet 均能得到明显的性能提升。但是当λ的值进一步增大时,反而会出现性能下降。因此,通过信息高速路网络进行传输的全局奖励值的比例实际上起到了对原有信用分配机制与仅考虑全局奖励的平衡作用。实验结果表明,λ=0.2是一个比较鲁棒的值。因此本文的所有实验场景都采用λ=0.2作为奖励高速路链接网络的权重。
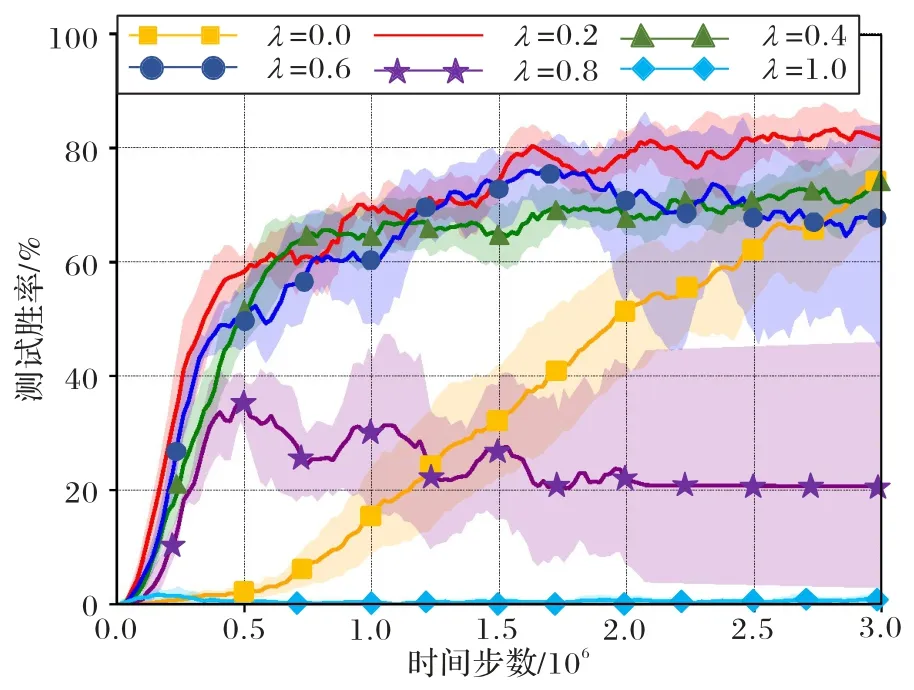
图4 在3s5z场景中所提出的算法对超参数λ的敏感性Fig.4 Sensitivity of the proposed algorithm to hyperparameter λ in 3s5z scenario
5 结语
在“中心训练-分散执行”的多智能体强化学习框架下,全局信用的分配可以通过对中心化值函数和非中心化值函数之间施加约束来实现。然而,不同的约束关系不仅决定了算法的复杂程度,还直接决定了奖励分配机制的有效性。本文提出了一种基于奖励高速路网络的全局信用分配算法RHWNet,通过在奖励分配机制上引入奖励高速路连接,能够达到:
1)每个智能体的决策行为能够考虑其自身所分得的局部奖励和整个团队的全局奖励;
2)奖励高速路连接结构简单,几乎不会引入额外的优化代价;
3)在多个复杂的场景下,RHWNet 相比原有的先进算法能够取得很好的性能提升。
本文的后续工作将会研究限制条件下的全局奖励分配问题(比如智能体之间存在资源竞争的关系),以及为智能体之间建立通信机制来进行协调配合。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
金桥(2018年4期)2018-09-26
党员生活(2015年8期)2015-08-21
杂文选刊(2015年4期)2015-03-18
当代贵州(2014年13期)2014-09-21
高中生学习·高三版(2014年3期)2014-04-29
数学大世界·小学低年级辅导版(2010年12期)2010-11-27