
Research on fault identification method of positive and negative fault subspace matrix
2021-01-20 05:36:50DongchenLijieZHANGBaozhongWANGZhiZHENG
机床与液压 2020年24期
Dong-chen E,Li-jie ZHANG,Bao-zhong WANG,Zhi ZHENG,3
(1 North China University of Science and Technology,Tangshan 063210,China)
(2 Hebei Agricultural University,Baoding 071001,China)
(3HUIDASanitary Ware Co.,Ltd.,Tangshan 063000,China)
Abstract:The fault subspace matrix is the common fault identification method for the principal component analysis(PCA)fault diagnosis.However,the fault subspace matrix can only describe which variable deviates from its normal value when a fault happens.When two kinds of faults have the same fault variable,the subspace matrix method cannot distinguish them.In order to improve the capability of fault identification based on the fault subspace matrix method,the positive-negative fault subspace matrix was proposed.The positive-negative fault subspace matrix not only reveals the fault variable but also the changing trend of fault variable,so that the fault types represented by subspace matrixes are more specific.Firstly,taking the minimum of monitoring statistics as the optimization object,the amplitude vectors of variables in various fault states were solved.Secondly,the variables’reconstructions are computed by the amplitude vectors,and the sign matrix is obtained by taking the sign of each element in amplitude vectors.Thirdly,the fault subspace matrix corresponding to the smallest reconstruction contribution rate was found.Fourthly,the positive-negative fault subspace matrix was calculated by multiplying the sign matrix and the fault subspace matrix.Finally,the current fault type was identified according to the positivenegative fault subspace matrix.The fault identification results for the car dumper hydraulic system proved that the proposed method has higher accuracy than the subspace matrix method,and has a broad scope of application.
Key words:Fault identification,Principal component analysis,Variable reconstruction,Fault subspace matrix,Car dumper hydraulic system
1 Introduction
Fault diagnosis is divided into analytical modelbased method and data analysis-based method,the model-based method needs to establish the mathematical model of diagnosed object firstly.However,it is difficult to establish an accurate model because of the nonlinearity and time varying parameters of the model in practice,which restricts the application of this method in production practice.Fault monitoring based on data statistics only needs the monitoring data of production process to establish statistical mode.Due to the computational process is simple,it has received extensive attention in recent years.Fault diagnosis method based on data statistics mainly includes principal component analysis(PCA),partial least squares analysis and non-negative matrix decomposition,and all extract the relational features from monitoring data and then construct the high-order statistics based onthe relational features.Finally,the fault monitoring is realized by the comparison between high-order statistic and its control limit.The SPE(Squared Prediction Error)high-order statistic can reflect the linear relationship between variables,so it is more sensitive to faults than single-variable method.
According to different purposes,the fault diagnosis includes three stages:fault monitoring,fault identification and fault prediction.Fault monitoring is to detect fault in production process.When a fault is found,the production should be stopped immediately to avoid further development of the fault.Fault identification is to determine the cause of a fault,so as to facilitate maintenance of equipment.Fault prediction is to infer the future working state of equipment according to the current state,so that the advance maintenance is achieved.The development of fault monitoring based on data statistics is relatively mature,but the accuracy of fault identification based on data statistics is relatively low.
The fault identification based on PCA includes the contribution plot method[1]and the reconstruction contribution rate method[2].The two methods firstly locate the fault variables,and then analyze the fault cause based on the fault variables.The fault variable is a variable which divided its normal value when a fault happens.The contribution plot is a bar plot based on the contribution to the T2statistic or SPE statistic of each variable[3-4].The larger contribution to T2statistic indicates that this variable deviates from its normal valuable.The larger contribution to the SPE statistic indicates that this variable violates the original relationship between variables.When calculating the contribution of variable,the data need to transform from original monitoring space to PCA feature space.The transformation makes the contribution of other variables correlated with the fault variable are large too.This leads the contribution plot cannot accurately reveal the variables which case the statistics excess their control limits.This phenomenon is called the“smearing effect”[5].
Due to the inaccuracy of contribution plot for fault identification,this paper focuses on the fault identification based on variable reconstruction contribution rate method[6].The variable reconstruction contribution rate is computed by statistic calculated based on the reconstructed data divided the statistic calculated based on the original monitoring data[7].If the reconstructed variable is fault variable,the higher-order statistics will be significantly reduced.The fault variable will be found by the smallest reconstruction contribution rate.The variable reconstruction is essentially a process of solving unknown variables by using the relationship extracted through PCA to minimize the monitoring statistics.According to the number of reconstructed variables can be divided into single variable reconstruction and multiple variables reconstruction.The single variable reconstruction is for fault which has only one variable deviates from its normal value,such as sensor fault.The multiple variables reconstruction has multiple monitoring variables deviated from their normal values.In the process of fault identification,the single variable reconstruction assumes in turn that a monitoring variable is in abnormal,and this variable is reconstructed by other variables.The reconstructed variable with the smallest monitoring statistic is the fault variable.The fault identification of multiple variables reconstruction is to reconstruct the monitoring variables using all of the fault subspace matrices in turn[6].The basic feature of multiple variables fault is described by fault subspace matrix.When a fault subspace matrix is the current fault type,the statistic will reduce significantly,so the fault represented by the fault subspace matrix with minimize statistic is the current fault type.Multi variables reconstruction method has a wider scope of application.The single variable reconstruction can be understood as a special case of multi variables reconstruction.
In order to further improve the identification accuracy of reconstruction contribution rate,the methods mentioned in papers mainly force on improving the accuracy of the relationship model.Zhao[8]aims at the problem that variance did not make the monitoring statistics increase will reduce the accuracy of variable reconstruction.He proposed that the normal data be projected into the feature spaces of fault data to extract the variances which result in the increasing of monitoring statistics,and then these variances were used to reconstruct.The result showed that this method has higher accuracy.Han[9]not only chose the feature directions which contribute more to monitoring statistics’increase from principal component space,but also chose the variables with larger variance from the original monitoring space.This method focused the problem variables more accurately and improved the computational efficiency for fault identification.Anis-sa Benaicha[10]took the accuracy of fault identification as optimization objective to determine the number of principal components,which improved the accuracy of fault identification and isolation.
This paper raises the accuracy of fault identification by improving the expression ability of fault subspace matrix.Previous fault subspace matrices can only describe which variables are the fault variables.For the faults with the same fault subspace matrix,the previous method cannot distinguish them.In this regard,the concept of positive-negative fault subspace matrix is proposed.The positive-negative fault subspace matrix not only reveals the fault variables,but also reveals the changing trend of the fault variables when a fault occurs.When the variable decreases compared with normal value,the corresponding element in matrix is-1.When the variable increases,the corresponding element is+1.This makes the fault types represented by fault subspace matrices are more concrete.The fault identification ability is improved.The positive-negative fault subspace matrix is suitable for fault identification for large equipment with multiple monitoring variables.And the variables show different changing trends in different fault states.The classification of fault identification based on PCA is shown in Fig.1.
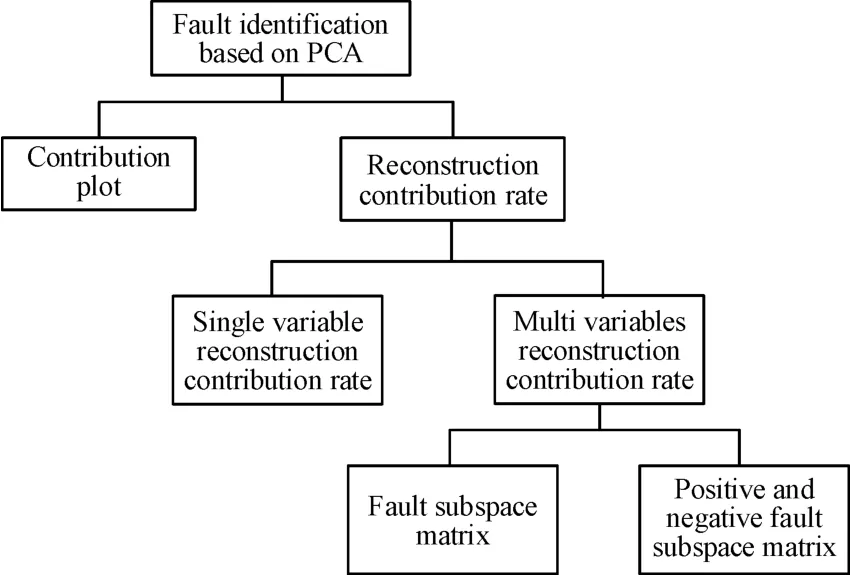
Fig.1 The classification of fault identification
This paper consists of following parts.Section 2 and 3 review separately the identification of single variable fault and multi variables fault.Section 4 describes the fault identification of positive-negative fault subspace matrix method.Section 5 validates the effectiveness of the positive-negative fault subspace method by taking the multi variables fault of car dumper’s hydraulic system as example.Finally,a summary and conclusion of this article is provided.
2 Fault identification based on contribution rate of single variable reconstruction
In general,the sensors in engineering equipment are unrelated,and always fail separately.For the reconstruction variable xi,taking the minimum of SPE as the optimization goal,this process is expressed as[11]

Where C is the coordinate transformation matrix from principal component space to original monitoring space,C=V^V^T.ziis the reconstruction of xi.V^is the eigenvectors in principal component space.x′iis the monitoring data containing the reconstruction variable zi,x′i=[x-izix+i],x-iis the monitoring variables arrayed before xiin x′i.x+iis the monitoring variables arrayed after xiin x′i.I is the J×J identity matrix,J is the number of variables.
Because I-C∈RJ×Jis a positive semidefinite matrix,the necessary condition forto be minimized is

Whereξiis the i th column of I.The formula of single variable reconstruction is obtained by(2)

Where c:,-iis the elements prior to i in the i th column of C,c:,+iis the elements after i in the i th column of C
The formula(3)requires ci,i≠1.If ci,i=1,the variable i is not related to other variables.It cannot be reconstructed by other variables.
The SPE reconstruction contribution rate of the variable i()is computed based on zi[6].

Where SPE(zi)is SPE with the reconstruction of variable zi.
The reconstruction algorithm based on T2statistic is consistent with SPE statistic,as long as the I-C in formula(1)is changed to C.The variable with larger contribution rate for statistics is the fault variable.The sensor monitoring the fault variable is the fault sensor.
3 Fault identification based on contribution rate of multi variables reconstruction
The multiple variables fault identification based on reconstruction contribution rate firstly needs to establish the library of common fault subspace matrices for the monitored object.The integrity of the library affects the accuracy of fault identification[12].The monitoring data vector(x)from fault state can be decomposed into the data under normal working state(zi)add the fault amplitude(Ξifi)[7]:

WhereΞiis fault subspace matrix of fault i,Ξi∈RJ×n;n is the dimension of fault subspace matrix which is equal to the number of variables to be reconstructed,n=rank(Ξi);fiis the vector of fault magnitude,fi∈Rn.
TheΞireflects the fault variables.The fireflects the change ranges of variables.ziis computed by x andΞifi:

The SPE:

The derivative of SPE(zi)with respect to fiis

In order to obtain fiwhen SPE reaches its minimum,the formula(8)is set equal to 0.The reconstruction formula for fiis presented.

According to whether the quadric form(I-C)Ξiis revertible or irreversible,the multi variables reconstruction is divided into complete reconstruction and partial reconstruction[13].In order to solve the partial reconstruction problem,singular value decomposition of(I-C)Ξiis used to remove the related vectors in(I-C)Ξi.U andV are the vectors corresponding to nonzero singular value.The inverse of(I-C)Ξiis computed by U andV[7].

The formula(10)is substituted into(9),the fault amplitude vector for partial reconstruction is obtained.

The single variable reconstruction is to simplify the optimization process of minimizing SPE to Ci,SPE=0 according to I-C is a positive semidefinite matrix.The multiple variables reconstruction based on subspace is to modify ziby fi.WhenΞirepresents a single variable fault,the results of the multiple variables reconstruction and the single variable reconstruction are same.
4 Fault identification based on the positive-negative fault subspace
For fault identification based on multiple variables reconstruction contribution rate,the conventionalΞican only describe which variable deviate from normal,and cannot describe the increase or decrease for fault variable.For the faults with the same fault subspace matrix cannot be distinguished.In this regard,the positive-negative fault subspace matrix method is proposed in this paper,which can reflect the change trend of variables so that the fault type represented by subspace matrix is more specific.It is helpful to determine the current faults of equipment more accurately.
Taking a two dimensional fault subspace matrix as an example,when both monitoring variables deviate their normal values,the fault subspace isΞ =[1 1]T.Ξ can only describe which variable is fault variable.For the same dimensional matrix,the positive-negative fault subspaces matrix can represent four types fault,such as=[1 1]T、=[-1 1]T=[-1-1]T、=[1-1]T,as shown in Fig.2.It can be seen that the discrimination ability of positivenegative fault subspace matrix is four times than conventional subspace matrix.
For an equipment has n independent monitoring variables,the discrimination ability of positive-negative fault subspace matrix is 2ntimes than the conventional subspace matrix.

Fig.2 The vector of positive-negative fault subspaces matrix
The computational procedure of algorithm as follows:
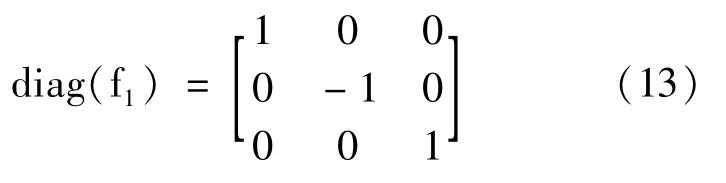
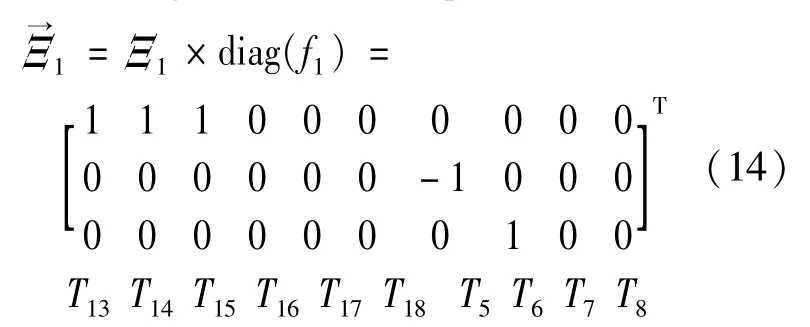
Firstly,theΞiis found out with the smallest
Secondly,the sign matrix diag(fi)is obtained by taking the sign of each element in fi.The positivenegative fault subspace matrixΞ→1is computed by Ξi×diag(fi).
Finally,the fault variables are judged by the elements inThe changing trends of variables are judged by the sign of 1.
5 Experimental study on the positivenegative matrix for fault identification
5.1 The working principle of the car dumper hydraulic system
The car dumper is large transport equipment for bulk material unloading of trains.It can unload many carriages at the same time,so its production efficiency is high.It is widely used in material transportation for port and metallurgical enterprise.The function of its hydraulic system is to clamp the carriage in frame to avoid falling down during unloading process.According to the arrangement of hydraulic cylinder,the hydraulic system is divided into the open side and the close side.According to the different functions of hydraulic system,it is divided into vertical holding and horizontal holding system.The vertical holding hydraulic system of C80 car dumper in some port is shown in Fig.3.There are 4 vertical holding cylinders(2.1-2.4)in the open side and 6 vertical holding cylinders(2.5-2.10)in the close side.A hydraulic control one-way valve(1.1-1.10)is arranged on the rod cavity interface for each cylinder.The pushing out and retraction of the piston are controlled by reversing valve 10.1 and 10.2.Through analyzing the working mechanism of the vertical holding system,18 pressure measuring points(T1-T18)are arranged in the system,as shown in Fig.3.In unloading process of coal in a carriage is borne by No.2.1,No.2.2,No.2.5,No.2.6,No.2.7 cylinders.The weight of coal in the other carriage is borne by No.2.3,No.2.4,No.2.8,No.2.9,No.2.10 cylinders.
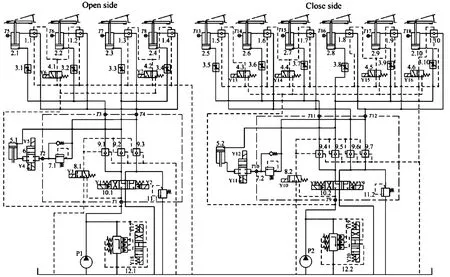
Fig.3 The vertical holding devices in hydraulic system of car dumper
A working batch of the dumper is50 to 60 seconds.There are 4 stages in a working batch:pressing down,releasing,holding and lifting.During the pressing down stage,the reversing valve 10.1 and 10.2 work on the left side,the rod of cylinders move downwards so that the carriages are clamped in the frame.The open pressure of relief valve(12)is 6 MPa in the pressing down stage.In the releasing stage,the compensation cylinders5.1 and 5.2 release the elastic potential energy of springs produced by the weight reduc-tion of bulk coal in carriage.The one-way valve(1)is opened in this stage.Pressure in rod cavity made the sequence valve(7.1)open.During the holding stage,the one-way valves are closed to keep pressure in rod side of cylinders.The pressure in rod cavity varies with the angle of reversal.During the lifting stage,the reversing valve 10.1 and 10.2 work on the right side and the rods are lifted and reset.The cylinders are differential connection in lifting stage.The open pressure of relief valve(12)is 10 MPa in lifting stage.In a working batch the duty ratio is 65%.
Due to the serious dust pollution in the working environment,the content of impurities in hydraulic oil is high.The clamping stagnation of spool in hydraulic valve and the blocking of damping orifice are caused by the unclean oil.When these phenomena occur,the hydraulic system of dumper does not work properly.For example,the piston of vertical holding cylinder cannot be pushed out and retracted.Because the fault in hydraulic system has characteristics of concealment,it needs more time to maintenance.If the fault diagnosis system can trace the source of fault,the utilization of the dumper will be improved significantly.
5.2 Fault identification results analysis by the positivenegative fault subspace
The common faults in car dumper hydraulic system include leakage of cylinder,seizing of reversing valve,pump pressure insufficiency and non-synchronization of the hydraulic cylinders.They all belong to the multiple variables fault.During releasing stage,the common fault types are the leakage of vertical holding cylinder and seizing of compensation cylinder.The pressure signals from T5~T8and T13~T18measure points were selected as the monitoring variables.
When the leakage fault occurs,there is less pressure in leakage cylinder.The weight of the bulk coal in carriage is borne by other four cylinders.When the No.2.1 hydraulic cylinder pressure lets out,the pressure in No.2.1 decrease,the pressure in No.2.2,No.2.5,No.2.6,No.2.7 cylinders increase.Because the No.2.5,No.2.6,No.2.7 cylinders are arranged in the close side,the increasing amplitude of pressure at T13~T15points are approximately equal.Due to the No.2.1 and No.2.2 cylinders are arranged in the open side,the decreasing amplitude of pressure at T5point and the increasing amplitude of at T6point are different.According to the number of different amplitudes in cylinders,the rank of the fault subspace matrix for leakage fault in vertical holding cylinder is 3.Because the fault variables and the number of different amplitudes for fault variables about the leakage in No.2.1 or No.2.2cylinder are the same,their subspace matrices(12)are the same too.

The eight fault subspace matrices for leakage of other cylinders and the seizing of compensation cylinder are set up as shown in appendix.
(1)Fault identification for leakage of No.2.1 cylinder
When the leakage of No.2.1 cylinder occurs,the monitoring data are reconstructed by the 9 fault subspace matrices in turn.Theis calculated by the reconstruction.In releasing stage,the mean offor the nine fault types are shown in Table 1.

Table 1 The Crec SPE for leakage in 2.1 cylinder

Table 2 Fault amplitude ofΞ1
It can be seen that except for the first moment the sign matrix of the fault amplitude vector is:
The positive-negative fault subspace matrix is:
If the leakage fault of No.2.5 cylinder occurs,the pressure will decrease.The decreasing amplitudes in No.2.6 and No.2.7 are the same in the close side.The decreasing amplitudes in No.2.1 and No.2.2 cylinder are different because they are arranged at a large distance from each other in the open side.The subspace matrix is:
Table 3 The for leakage in 2.1 cylinder

Table 3 The for leakage in 2.1 cylinder
Fault subspace matrix Ξ1 Ξ2 Ξ3 Ξ4 Ξ5 Ξ6 Ξ7 Ξ8 Ξ9 CrecSPE 0.86 0.08 0.65 0.67 0.84 0.83 0.84 0.84 0.74

Table 4 Fault amplitude ofΞ2
The sign matrix of the fault amplitude vector at all times is:
The positive-negative fault subspace matrix is:
The element corresponding to T13 inΞ2is-1.This indicates that the fault leads to pressure of No.2.5 cylinder decrease.The identification result is the leakage of No.2.5 cylinder.It is consistent with the actual fault.
(3)The seizing of No.5.1 compensation cylinder
When the compensation cylinder is seized,there is a significant difference between the pressure in open side cylinder and closed side cylinder.Because the correlation of variables between the open side and the closed side is weak,the fault monitoring rate of SPE is lower than T2.Therefore,the minimum of T2is used as the optimization objective to reconstruct the fault variables.When the compensating cylinder 5.1 is seized,the pressure of cylinders in the open side and the close side are different.Furthermore,the No.2.5 to No.2.7 cylinders bears a carriage;the No.2.8 to No.2.10 cylinders bears the other carriage.So the pressures in No.2.5 to No.2.7 cylinders and in No.2.8 to No.2.10 cylinders are different too.According the monitoring data for the seizing of No.5.1 compensation cylinder,the changing amplitude of pressure in No.2.1 and No.2.2 are different,the changing amplitude of pressure in No.2.3 and No.2.4 are different too.Based on above analysis,the subspace matrix is:

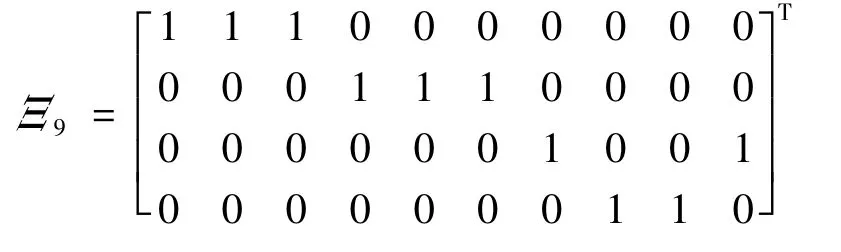
The fault subspace matrix for the seizing of No.5.2 compensation cylinder is the same as formula 18.The mean of reconstruction contribution rates of T2for the nine faults in releasing stage are shown in Table 5.
From the table 5,the optimization effect of T2is obvious,which makes T2reduces sharply.Because the absolute value of T2is small.Theis computed firstly,and then the average ofis computed.As shown in table 5,theofΞ9is much smaller than other faults.It could be preliminarily confirmed that the current fault is from compensation cylinder.The f9based onΞ9are computed as shown in Table 6.
Table 5 The for compensation cylinder fault

Table 5 The for compensation cylinder fault
Fault subspace matrix Ξ1 Ξ2 Ξ3 Ξ4 Ξ5 Ξ6 Ξ7 Ξ8 Ξ9 Crec T2×10-17 2.63 3.81 7.89 3.15 2.23 4.21 3.22 1.86 0.18

Table 6 Fault amplitude ofΞ9
The sign matrix of fault amplitude vector at all times is:
The positive-negative fault subspace matrix is:

Through the three identification results of multiplevariables fault for car dumper hydraulic system,it is shown that the positive-negative fault subspace method can identify faults more accurately than conventional fault subspace method.The superiority of this method is proved.
6 Conclusion
1)This paper systematically describes the fault identification based on PCA.In view of the faults with the same fault subspace matrix,the method of fault subspace matrix cannot distinguish them effectively.The method of positive-negative fault subspace matrix is proposed to further reveal the changing trend of fault variable so that the fault represented by the matrix is more specific.
2)Due to the hydraulic system of car dumper is a large and complex system,the accuracy of its physical model is low.The fault diagnosis-based data analysis is a more effectual method.The PCA method is used to monitor the working process of the car dumper’s hydraulic.The fault identification results of leakage and cylinder seizing prove that the positive-negative fault subspace matrix method has high accuracy and wide applicability.The new method can recognize the faults which cannot be distinguished by the subspace matrix method.
Appendix
The fault subspace matrix for leakage of cylinder No.2.5:

The fault subspace matrix for leakage of cylinder No.2.6:
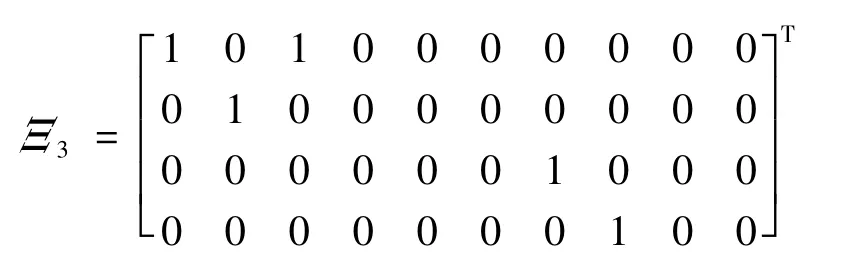
The fault subspace matrix for leakage of cylinder No.2.7:

The subspace matrix for leakage of cylinder No.2.3 or No.2.4 is:

The fault subspace matrix for leakage of cylinder No.2.8:
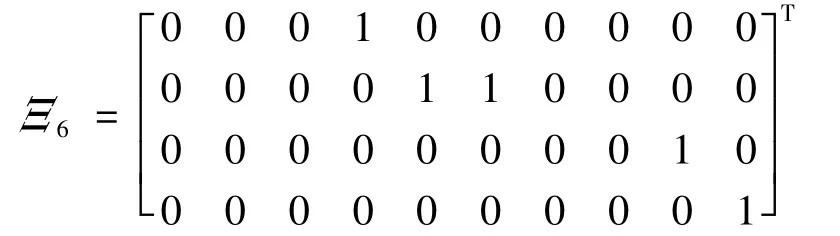
The fault subspace matrix for leakage of cylinder No.2.9:
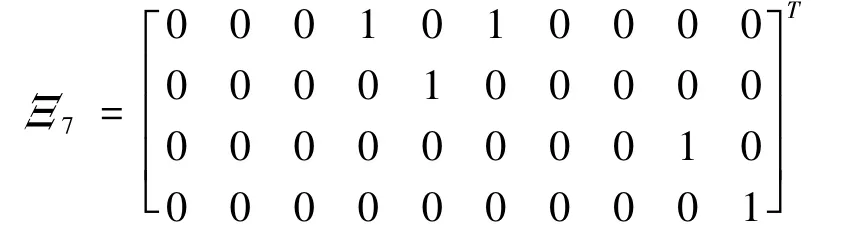
The fault subspace matrix for leakage of cylinder No.2.10:
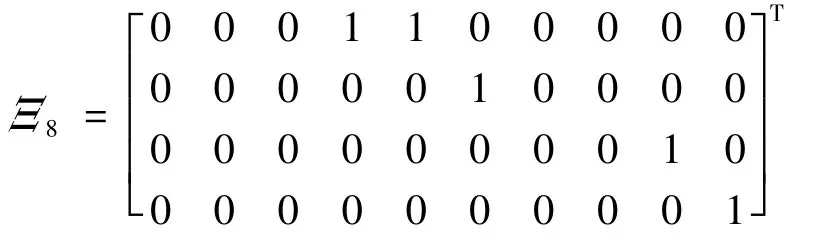
The fault subspace matrix for seizing of compensation cylinder in open side or close side:
- 机床与液压的其它文章
- Analysis of cylindrical roller bearing with local damage based on multi-body dynamics
- Research of hydraulic gradient for large particle slurry in inclined pipeline
- Study on a LPs control algorithms in SCARrobot
- Research on mechanism of intelligent manufacturing equipment based on eye tracking control
- Path planning for obstacle avoidance of mobile robot based on optimized A*and DWA algorithm
- Real-time recommendation based on comprehensive popularity of items