
基于C#的直臂式擦窗机配重的优化计算
2021-01-20 11:41:56王彩涛沈俊杰
南方农机 2021年1期
王彩涛, 沈俊杰, 李 静
(长安大学,陕西 西安 710064)
0 引言
擦窗机作为一个高空载人作业设备, 为保证擦窗机工作的可靠性, 保证工人的安全以及保护施工方的财产不受损失,合理的选择配重块布置位置至关重要。 为了保证擦窗机在全伸与全缩时都能够满足稳定性要求可以采用双配重块的方案, 将配重块分别布置在平衡臂尾部和立柱回转中心处, 本文将借用VS 的winform 平台,C# 程序来计算出最优化的布置方案。
1 数据提取
本文中所使用的数据来源于擦窗机参数化设计平台提供的,数据存储于excel 表格中[1]。 通过C# 语言后台提取擦窗机各级臂、立柱、底架、质量质心,以及平衡臂长度、最大工作长度、最小工作长度。 核心代码如下:
Excel.Application XAPP = new Excel.Application();
Excel.Workbook XBOOK = XAPP.Workbooks.Open(“路径.xls”, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value,Missing.Value, Missing.Value, Missing.Value, Missing.Value,Missing.Value);
Excel.Worksheet XSHEET =(Excel.Worksheet)XBOOK.Sheets["SHEET1"];
X = XSHEET.Cells[A][B].Text.ToString()。
2 配重优化计算
擦窗机配重块一般布置在平衡臂尾部, 这样可以最大限度减少擦窗机的整机质量, 保证擦窗机在全伸时的稳定性, 有时配重块质量过大会导致擦窗机在停机状态时发生侧翻。因此,可以采用双配重的布置方式,配重块1布置在平衡臂尾部, 配重块2 布置在立柱回转中心处,这样配重块2 在伸缩臂全伸与全缩时均起着稳定力矩的作用,如图1 所示。
擦窗机的稳定性可以通过最大倾覆力矩直观的表现出来, 本文将倾覆力矩转化为作用在行走轮上的一对力偶,通过合理的分配两个配重块的质量,使四个行走轮的最大轮压与最小轮压比小于一个定值。 随着配重块2 的质量增加以及整机质量的增加,限定最终方案行走轮的最大轮压不超过配重块2 质量为0 时最大轮压的3%。 优化计算流程如图2 所示。
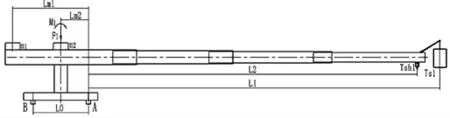
图1 配重块布置方案
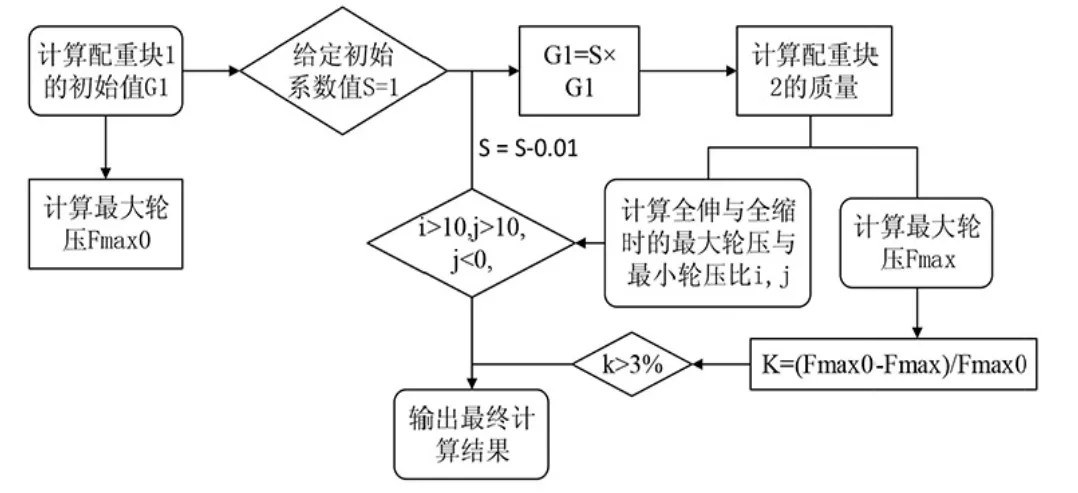
图2 配重优化计算流程
2.1 伸缩臂受力的简化
为了计算的简便,将立柱上方伸缩臂及臂头受力简化到立柱回转中心处,一是垂直方向受力,二是作用在立柱回转中心处的弯矩M。
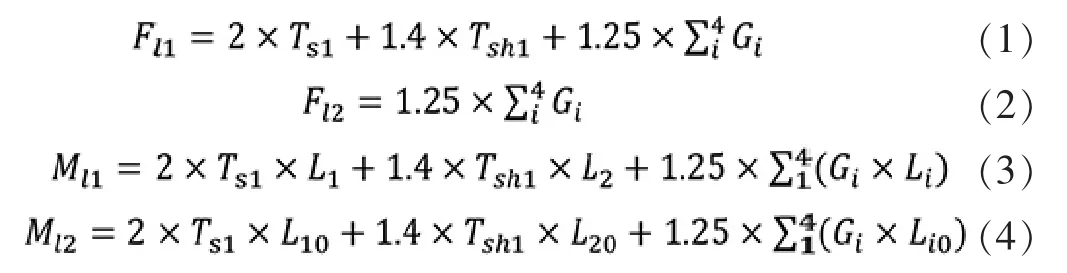
式中:Fl1/Fl2-伸缩臂全伸与全缩时垂直方向受力;Ml1/M12-伸缩臂全伸与全缩的弯矩;Gi-各级臂质量;Ts1-吊篮总重力;Tsh1-吊钩总悬挂重力;Li/L1/L2-伸缩臂全伸时各级臂、吊篮、吊钩距立柱回转中心距离;Li0/L10/L20-伸缩臂全缩时各级臂、吊篮、吊钩距立柱回转中心距离。

式中:R1-吊篮额定载荷;Swp-吊篮自重;Mwr-吊篮位于最低点时钢丝绳质量;Mc-电缆质量。
2.2 配重块1 的初值计算
根据擦窗机国家标准GB/T 19154-2017 中稳定性要求[2],擦窗机在全伸时对于A 点应满足式(4)的平衡条件:

式中:Gd-底架质量;Gl-立柱质量;L0-轮距。
令配重块2 的质量m2=0, 可以得出满足全伸稳定性要求的配重块1 质量初值m1。
2.3 配重块2 质量的计算
为了确定一个满足全伸与全缩兼满足稳定性要求的配重块质量m1与m2,本文引入一个质量系数S,在确定配重块1 的初始质量m1后,给配重块1 乘一个质量系数S,如式(7)。 取新的配重块1 的质量m1,再根据稳定性条件(6)计算配重块质量2 的质量:

配重块2 质量m2需要在伸缩臂全缩时同样满足稳定性条件,如式(8):

2.4 轮压计算
确定了配重块1 与配重块2 的质量后,整机质量就确定了。 将整机弯矩与整机倾覆力矩简化到沿立柱回转中心处,如下式:

式中:FZ1/FZ2-伸缩臂全伸与伸缩臂全缩整机重力;Mz1/Mz2-伸缩臂全伸与伸缩臂全缩时沿立柱回转中心的整机弯矩。
根据式(9)~(12)可以计算四个行走轮在伸缩臂全伸与全缩时的最大轮压Fmax与最小轮压Fmin。 如下式:
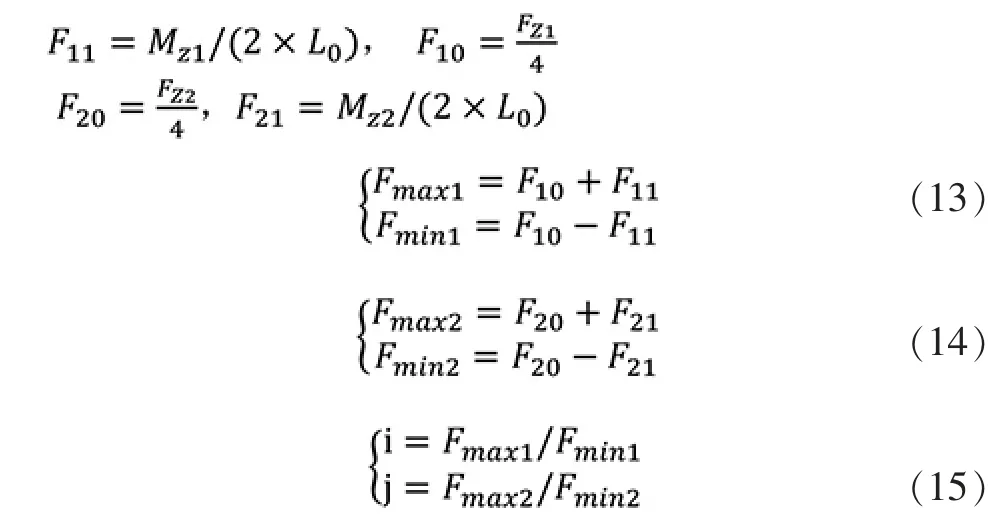
式中:Fmax1/Fmin1-伸缩臂全伸时最大轮压与最小轮压;Fmax2/Fmin2-伸缩臂全缩时最大轮压与最小轮压;i/j-伸缩臂全伸与全缩时的最大轮压与最小轮压比。
为了使擦窗机工作稳定性更好, 可以限制最大轮压与最小轮压比i<10,j<10。 此外,当伸缩臂全缩时,如果不满足稳定性要求,则Fmin2<0,即j<0。因此,当质量系数S 不满足以上三个条件时,令S=S-1,继续计算得出新的配重块1 与配重块2 的质量,直到满足条件为止[3]。
此外,当S=1,即配重块2 的质量m2=0 时会得出一个最大轮压值Fmax0,在确定最终方案时又会得出一个最大轮压值Fmax,当最大轮压值Fmax超过Fmax03%时,如式(16),停止迭代。

3 后台界面与功能
上述数据的提取以及优化计算的过程都是通过C#后台程序以及winform 平台交互实现的,图3 为擦窗机配重优化计算后台搭建的界面[4]。
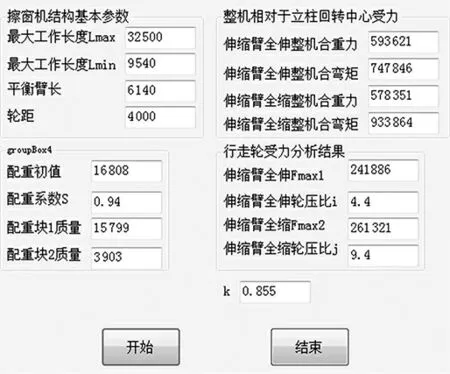
图3 擦窗机配重优化计算界面
当点击开始按钮时,后台程序在指定文件夹下读取数据库并提取需要的数据并开始配重优化计算,将整机的基本结构参数以及计算结果输出到最终界面当中。 当需要优化计算另一组擦窗机的配重时,需要将后台数据库文件名字改为“配重计算参数汇总”。 当分析结束后,点击结束按钮停止程序运行。
4 结论
当伸缩臂最大臂长小于30 000mm 时,一般不需要双配重,当伸缩臂最大臂长大于30 000mm 时,最大轮压与最小轮压比较大,或者是在全缩时不满足稳定性要求,采用双配重的布置不仅可以满足稳定性要求,还可以合理的分配行走轮的受力。
猜你喜欢
中老年保健(2021年8期)2021-08-24 06:24:14
运输经理世界(2021年2期)2021-03-06 11:56:53
科技风(2019年11期)2019-10-14 20:25:27
记者观察(2019年1期)2019-04-04 01:06:36
山东工业技术(2019年6期)2019-03-27 00:57:30
四川水泥(2019年7期)2019-02-17 13:09:22
上海建材(2018年4期)2018-11-13 01:08:54
中小企业管理与科技(2018年23期)2018-02-07 08:08:14
科学与财富(2018年34期)2018-01-15 10:14:54
东方考古(2016年0期)2016-07-31 17:45:44
