
AUV 自主回收捕获机构设计与分析
2021-01-19 08:10:50白桂强谷海涛王子庆李宁高伟
舰船科学技术 2020年12期
白桂强,谷海涛,王子庆,李宁,高伟
(1. 中国科学院沈阳自动化研究所,机器人学国家重点实验室,辽宁 沈阳 110016;2. 中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110016;3. 中国科学院大学,北京 100049)
0 引 言
自主水下机器人(Autonomous Underwater Vehicle)回收方式主要有罩笼式、着陆式、捕获式、机械臂式[1-5]。捕获式回收优点是:AUV 在水中能够实现与对接目标的全方位对接,受海洋环境的干扰相对较小,对接可靠性较高[6]。图1(a)为佛罗里达大西洋大学设计的捕获式回收装置,该装置捕获范围大,对AUV 航行精度要求低,但该装置不能自主脱离回收缆绳,故不适用于自主收放AUV[7]。图1(b)为佛罗里达大西洋大学设计的捕获式回收机构,该机构与USV(Unmanned Surface Vehicle)配合可完成AUV 自主收放工作。该机构结构简单,由伺服电机直接驱动捕获装置,捕获范围大,但是受力易损坏,承载能力小[8]。图1(c)为Hydroid 公司为REMUS AUV 研制的LCLR(LineCaptureLine Recovery)模块化回收机构,AUV 航行时,该机构可回收至AUV 形体内部,对AUV 航行阻力影响小,但该机构回收AUV时需要支反力,故不适用于动态回收AUV[9]。OdysseyII AUV 可利用其简单可靠的夹持机构捕获回收缆绳,但是该机构的导向杆不能闭合,对AUV 的操纵性有不利影响[10]。图1(d)为洛克希德·马丁公司为MARLIN AUV 设计的捕获式回收机构,该回收机构结构复杂,AUV 航行时机构可收入AUV 形体内部[11]。
本文结合捕获式回收技术特点以及国内外研制的捕获式回收机构,设计由导向机构与锁紧机构组成的捕获式回收装置。所设计回收机构结构简单,受力不易损坏,捕获范围大,能够共形。只需更改该机构部分设计参数便可适用于不同直径的AUV。本文以直径为250 mm 的AUV 为载体进行设计与分析,如图2 所示。AUV 用多普勒测速仪、电子罗盘以及超短基线组合导航,具有良好的定点、定向、定深航行能力。动基座由USV 以及拖曳装置——V 型翼组成。USV 采用差分GPS 与电子罗盘组合导航,具有稳定的定点、定向、定速航行能力。V 型翼外形为三角形,其自身具有深度及姿态稳定能力。采用Adams 软件对回收机构进行动力学分析,以研究导向机构长度及开口半径对于AUV 回收过程的影响;采用Star-ccm+流体分析软件研究AUV 回收机构外形对于AUV 航行影响。

图 1 回收机构图Fig. 1Recovery mechanism diagram

图 2 便携式AUVFig. 2Portable AUV
1 机构设计
1.1 回收方案设计
根据AUV 回收特点,将AUV 回收过程分为导引过程与对接过程。导引过程分为远距离声学与近距离光学导引。在10 km 范围内,声学通信与定位系统性能优越[12],AUV 利用超短基线与动基座进行定位后,以1.5 m/s 速度驶向动基座。AUV 与动基座距离较近时声学导引误差大,而近距离时光学导引精度高。蓝绿光可视距离在水下最远100 m[12],试验表明在千岛湖水质(光学衰减系数:0.6 m-1)中光导引最大作用距离为15 m,因此当AUV 与动基座距离为10~15 m 时由声学导引转换为光学导引。光学导引设备由光学传感器——摄像机以及灯标组成。直径为1 m 的灯标安装于V 型翼后方,光源为蓝光。由于水下摄像机存在开角,因此AUV 距离动基座较近时会进入摄像机盲区。摄像机开角为45°时不同对接高度的盲区范围如图3 所示。对接高度1 m 一方面可以满足AUV 定深精度要求,另一方面可以减小A U V 回收时盲区距离。AUV 进入光学导引盲区后由导引过程转换为对接过程。对接过程中,AUV 自主定深定向航行直至完成对接回收。回收对接场景如图4 所示。

图 3 摄像机45°开角时盲区范围Fig. 3The camera Angle of 45° open blind area range

图 4 对接场景图Fig. 4Illustration of the recovery scenario
1.2 回收机构组成
回收机构分为导向机构与捕获机构,二者均为曲柄滑块机构。回收机构由直流电机,丝杠螺母,推杆,导向机构,捕获机构,机架,回收机构外壳以及承力结构件等组成。直流电机驱动丝杠螺母,从而推动推杆驱动导向机构与捕获机构运动。机构主要组成部分如图5所示。其中,图5(a)为导向机构部件,图5(b)为捕获机构部件。
AUV 回收机构与缆绳对接过程如图6 所示。导向杆导向回收缆绳至回收机构末端时,回收缆绳阻断到位检测装置——对射型红外线传感器发射端与接收端信号,传感器产生低电平触发信号,使电机驱动捕获爪产生捕获动作将缆绳捕获。AUV 航行时,导向机构可回收至AUV 形体内部以减小回收机构对于AUV 航行阻力。

图 5 回收机构部件Fig. 5Recovery mechanism component
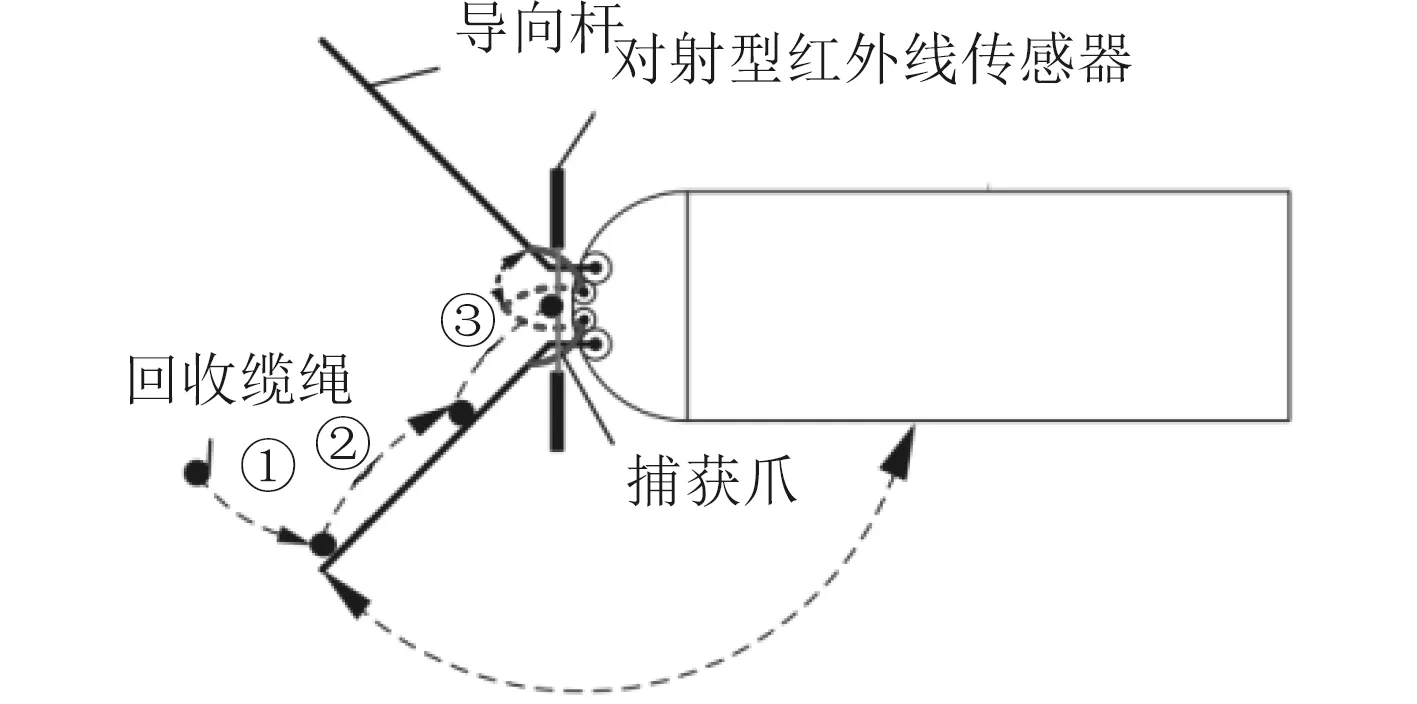
图 6 对接过程简图Fig. 6Schematic diagram of recovery process

图 7 回收机构几何关系简图Fig. 7Geometric relationship of recovery mechanism
1.3 机构设计
由图3 可知,AUV 进入光学导引盲区到捕获完成,需要进行相对距离为4.5 m 的自主航行。AUV 与动基座之间相对速度为v,AUV 运动速度为V,AUV 自主航行偏航角为θ,则AUV 自主航行偏航距离L 为:

图7 为AUV 回收机构几何关系简图,F1为AUV推进器产生推力,AUV 方向舵与俯仰舵产生最大力矩为MZ,可得出导向机构开口半径K1范围:

导杆与回收缆绳之间不能自锁。回收缆绳表面材料为橡胶,导向杆材料为金属,两者之间摩擦系数μ 约为0.5[13]。AUV 直径为D,鱼雷形AUV 长度与直径比值小于11 时航行阻力小[14]。AUV 控制段,能源段等固有长度为I,因此导向机构长度为l4与导向机构半角 α 应满足:

本文针对实验室直径为250 mm 的AUV 进行设计,对接最大航行速度V 为1.5 m/s,自主航行偏航角θ 为±1°,AUV 推进器推力F1为20 N,方向舵与俯仰舵产生最大力矩为MZ为6 N·m。便携式AUV 控制段,能源段,推进段等固有长度2 100 mm。由此可得出AUV 导向机构尺寸为:
回收缆绳直径为10 mm,取安全裕度为3,即捕获机构开口直径K2为3 倍缆绳直径。捕获机构为曲柄滑块机构,其运动副为线高副,受力容易被破坏。因此,在回收机构末端设计承力结构可与回收缆绳上的回收球形成平面副接触,优化整个回收机构的受力,承力结构如图8(a)所示。针对该结构进行强度校核,施加载荷为150 kg 时其应力如图8(b)所示。由图可知,该结构最大应力41.56 MPa,为不锈钢屈服极限的17.8%。

图 8 承力结构Fig. 8Bearing structure
2 机构分析
回收缆绳在导杆最外端与导杆接触时,两者之间接触力对于AUV 重心力臂最大。在与缆绳碰撞过程中,随AUV 与回收缆绳之间接触力矩变大,AUV 航行稳定性变差,当接触力矩超过AUV 本身扶正力矩,将导致AUV 失稳。开口半径K1相同时,机构半角α 越大,导杆长度越小,如图9 所示。因此,机构开口半径不同,对于AUV 对接过程稳定性影响不同。用ADAMS 动力学仿真软件与Star-ccm+流体力学仿真软件,对不同开角下导杆长度对于AUV 对接过程的影响进行分析。

图 9 导向杆尺寸关系Fig. 9Dimension relation of guide rod
2.1 回收机构动力学仿真分析
在对接过程中,AUV 回收机构与回收缆绳的碰撞属于刚性体与柔性体碰撞,采用ADAMS 多体动力学仿真软件进行AUV 与缆绳对接过程碰撞力的分析,研究导向杆长度与开角对于AUV 对接过程稳定性影响。
在对接过程中,AUV 与动基座相对速度为0.5 m/s。3 级海况回收AUV 时[15],回收深度应大于3 m,缆绳长度为5 m。将长度为5 m 的缆绳离散为通过柔性连接副连接的圆柱体,以此建立多刚体动力学模型近似回收缆绳,文中主要采用轴套力连接近似模拟钢丝绳。ADAMS 中提供的轴套力柔性连接实际上是一个6 分量的弹簧结构,通过定义3 个力分量和3 个力矩分量在2 个构件之间施加1 个柔性力。该方法所建立的回收缆绳模型刚度低,柔韧性和弹性好,适合对短程拖令系统[16]。由文献[16]可知,直径为10 mm 的钢丝绳轴套力刚度系数如表1 所示。

表 1 缆绳轴套力刚度系数Tab. 1 Stiffness coefficient of axle sleeve force of cable
USV 以不同速度拖曳V 型翼时,其产生下压力与阻力不同导致缆绳倾角不同,V 型翼产生的阻力与下压力及缆绳倾角如表2 所示。进而导致AUV 回收机构与缆绳对接过程中所受力与力矩不同。

表 2 V 型翼产生阻力与下压力Tab. 2 Drag and downforce generated byV-shaped wings
AUV 质量为100 kg,在重心处施加980 N 竖直向上的力以模拟AUV 在水中的零浮力状态。计算导向机构开口半角α 为22.5°,30°,37.5°,45°,52.5°,60°时,AUV 以0.5 m/s 的相对速度撞击4 种不同倾角的缆绳,共计24 种工况下的接触力以及力矩。Constant_BDF 求解器为刚性稳定算法,可直接求解DAE方程,采用SI2 积分格式时,求解加速度与力精度高,采用该模型能满足本文分析需求。图10 为AUV以不同开角与回收缆绳对接是所受回转力矩大小。图11为AUV 以不同开角与回收缆绳对接时所受俯仰力矩大小。

图 10 对接时AUV 回转力矩Fig. 10Rotation of AUV colliding with cable

图 11 对接时AUV 俯仰力矩Fig. 11Pitching of AUV colliding with cable
图10~图14 中:A 表示开角为45°,B 表示开角为60°,C 表示开角为75°,D 表示开角为90°,E 表示开角为105°,F 表示开角为120°。由图11 与图12 可得出,随AUV 导向机构开角增大,对接过程中AUV 所受回转力矩与俯仰力矩增大;开口半径相同时,对接时V 型翼速度越大,AUV 所受回转力矩与俯仰力矩越大。
2.2 回收机构水动力仿真分析
为减小AUV 运动时阻力,降低AUV 航行能耗,回收机构在闭合时需回收至AUV 形体内部。开口半径K1相同时,不同的开口半角 α 所对应的AUV 长度如表3 所示。采用计算流体力学软件Star-ccm+批处理功能,计算不同长度的AUV 分别以0.75 m/s,1 m/s,1.25 m/s,1.5 m/s 速度运动时所受阻力。

图 12 回收机构闭合时的阻力Fig. 12Resistance of closed recovery mechanism

图 13 回收机构打开时AUV 所受阻力Fig. 13Resistance of open recovery mechanism

图 14 AUV 压力云图Fig. 14Pressure cloud of AUV

表 3 不同开口半角α 所对应的AUV 长度Tab. 3AUV lengths corresponding to different opening
图12 为AUV 回收机构闭合时AUV 所受阻力。由图可知,导向杆越长,AUV 运动时所受阻力越大;AUV 开口半径不变时,AUV 运动速度越大,AUV 所受阻力越大。图13 为AUV 回收机构打开时AUV 所受阻力。由图可知,AUV 回收机构打开时,AUV 运动所受阻力略有增加;随AUV 运动速度增加,AUV 所受阻力逐渐增大。
AUV 回收机构为不规则外形,为减小AUV 航行阻力,设计球形与椭球形两种回外形包裹回收机构,并针对2 种外形进行水动力仿真计算。图14(a)为AUV外形为球形压力云图,图14(b)为外形为椭球形压力云图。由图可知,AUV 在运动时产生压力主要区域为回收机构区域。不同外形下AUV 所受阻力计算结果如图15 所示。其中曲线A 为椭球形回收机构外形,曲线B 为无回收机构时AUV 首部外形,曲线C 为球形回收机构外形。由图可知,回收机构外形为椭球形时AUV 所受阻力与无回收机构时AUV 所受阻力相当,且明显小于回收机构外形为球形。

图 15 不同外形AUV 运动所受阻力计算结果Fig. 15Resistance for different AUV shapes
由ADAMS 及Star-ccm+仿真结果可知,当回收机构开角大于90°时,AUV 与缆绳对接过程中所受力矩大于AUV 扶正力矩,影响AUV 稳定性;回收机构开角小于75°时,AUV 航行阻力大于螺旋桨推力。因此选择开角为75°的回收机构进行外场试验。
3 试验验证
为验证回收机构可靠性以及回收机构对于AUV 对接过程稳定性影响,进行湖上试验。通过湖上试验,获取AUV 偏航角、深度数据等信息。AUV 航行深度如图16 所示。其中曲线A 为实际深度,曲线B 为目标深度。由图可知,AUV 航行深度偏差±0.1 m,均方差0.16 m。AUV 航行航向角数据如图17 所示。其中曲线A 为实际航向,曲线B 为目标航向。由图可知,AUV航行偏航角为±1°。由AUV 深度及偏航角数据可知,加装回收机构后AUV 航行精度满足回收需求。
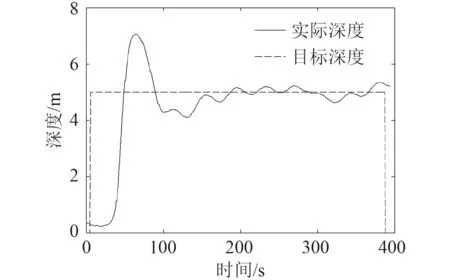
图 16 AUV 航行深度数据Fig. 16Depth data during AUV navigation
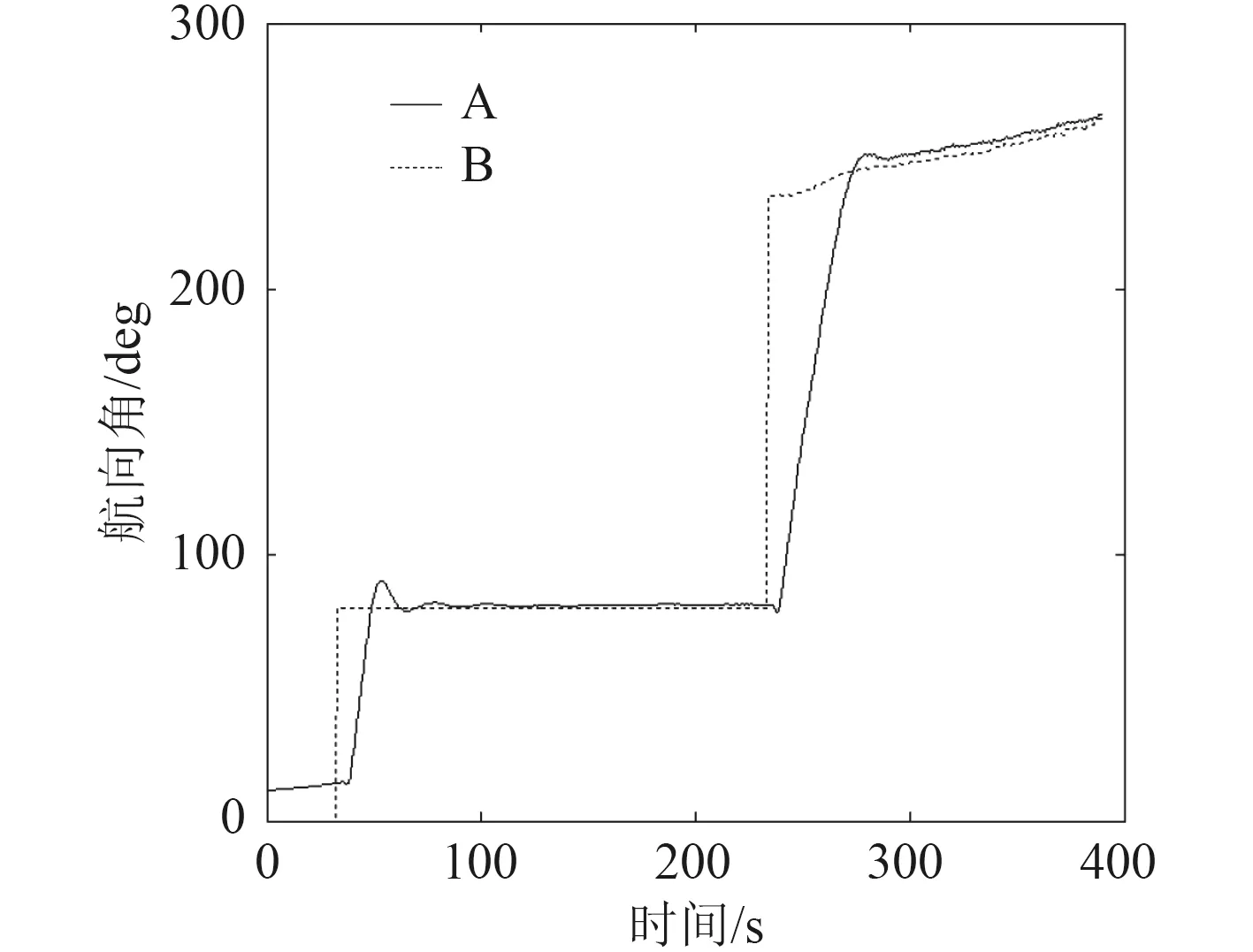
图 17 AUV 航行艏向角数据Fig. 17AUV heading Angle data
图18 为AUV 主推转速相同时,AUV 回收机构打开和闭合时航速。其中曲线A 为回收机构闭合时AUV航速;曲线B 为回收机构打开时AUV 航速。由图可知,加装回收机构后AUV 航行阻力变大,相同主推转速下AUV 速度降低,但仍然达到回收时所需航速。

图 18 主推转速相同时AUV 航速Fig. 18The AUV speed with the same propeller speed
经过湖上试验验证,回收机构可靠性强,对AUV操纵性影响小,回收AUV 时回收机构顺利打开。
将数据整理后得到回收机构打开前后AUV 速度变化,如表4 所示。

表 4 回收机构打开前后AUV 速度变化Tab. 4 Changes of AUV speed before and after opening of recovery mechanism
4 结 语
本文设计了一种用于自主回收AUV 的捕获式机构,并对该机构的机械结构及机构原理作了介绍。对机构外形及参数对于AUV 回收过程影响进行了深入分析,通过仿真计算及湖上试验获取了有效数据,验证了该机构的可靠性,得出如下结论:
1)设计的回收机构分为捕获机构与导向机构,承力结构与缆绳上球体配合可保证AUV 回收过程可靠性与安全性,经外场验证,所设计回收机构动作成功率大于90%。
2)导向机构开角与所受缆绳力矩正相关,与AUV航行所受阻力负相关。导向机构开角应位于大于75°且小于90°,回收机构打开比闭合时AUV 阻力增加约为15%。
3)机构外形为椭球形时AUV 所受阻力与无回收机构时AUV 所受阻力相当,且明显小于外形为球形时AUV 所受阻力。
猜你喜欢
山东第一医科大学(山东省医学科学院)学报(2021年7期)2021-10-13 06:40:50
中国品牌(2021年7期)2021-08-09 21:21:51
中华养生保健(2020年9期)2021-01-18 03:12:30
船舶标准化工程师(2020年5期)2020-10-17 03:26:04
上海海事大学学报(2019年4期)2019-12-30 01:36:40
中国港湾建设(2017年11期)2017-12-19 12:27:06
水利技术监督(2016年6期)2017-01-15 14:01:45
戏剧艺术(上海戏剧学院学报)(2016年1期)2016-01-23 02:35:08
中国卫生标准管理(2015年17期)2016-01-20 09:26:45
中国卫生标准管理(2015年25期)2016-01-14 09:29:23
