
无刷直流电机同步的电路设计
2021-01-18 08:14:30储汇连赵启亮
吉林大学学报(理学版) 2021年1期
李 慧,储汇连,赵启亮,刘 越
(长春工业大学 电气与电子工程学院,长春 130012)
近年来,无刷直流电机(BLDCM)的稳定运行已引起人们广泛关注, 该类电机在某些特定参数条件下会产生混沌现象[1],因其非周期和不可预测性[2-3],被认为是错误或故障而误处理,导致电机损毁,进而影响整个工程的运行. 为避免混沌发生,研究人员提出了有效控制策略,如滑模控制法[4]、 反馈控制法[5]和自适应模糊控制法[6],从而实现了该类系统的同步算法研究与控制[7-9]. 但上述方法主要基于理论仿真,且控制器的设计较复杂,在实际工程中不易实现.
本文提出反推同步控制方法,实现2个BLDCM的同步控制,从而实现驱动系统与响应系统的同步运行. 首先,基于BLDCM负载运行状态下的数学模型,分析该系统的混沌动力特性; 其次,基于Lyapunov稳定性原理,设计反推同步控制器并进行稳定性研究; 最后,设计基于电流转换器的BLDCM电路仿真器. 数值仿真及电路实现表明,该控制器的设计参数较少,在2~4 s即可实现快速稳定同步,且能保证系统的稳定性.
1 BLDCM模型及混沌特性
d-q坐标下的BLDCM数学模型[10]为
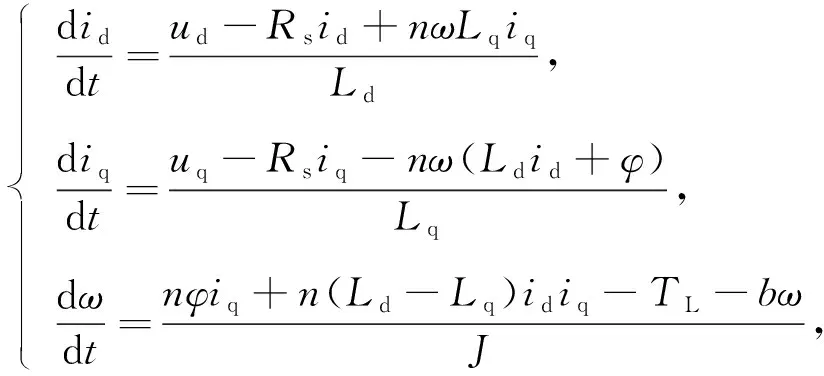
(1)
其中,id和iq分别为直轴和交轴定子电流,ud和uq分别为直轴和交轴定子电压,TL为外部扭矩,φ为转子永磁磁链,Rs为定子电阻,n为极对数,J为转动惯量,b为阻尼系数. 假设电机系统气隙均匀,并对系统进行线性映射与时间尺度变换[10]可得
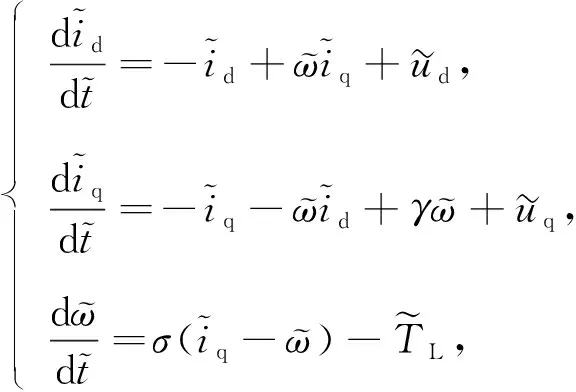
(2)
其中,γ为自由参数,σ=bτ/J为系统参数.

图1 的相轨迹曲线Fig.1 Phase trajectories of
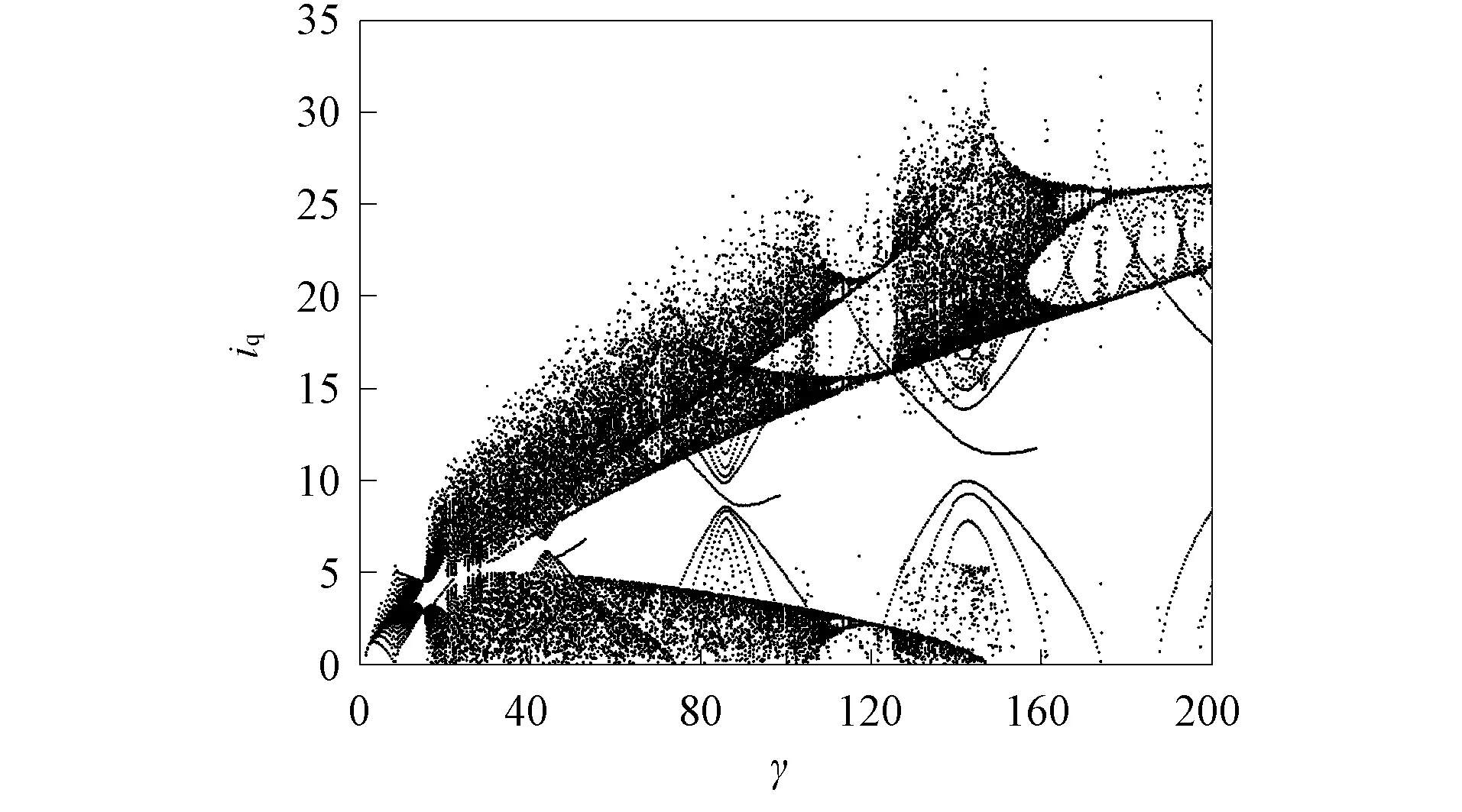
图2 Hopf分岔图Fig.2 Hopf bifurcation diagram
2 反推同步算法
2.1 反推同步控制器的设计
本文设计了反推同步控制器实现混沌系统同步,具体过程如下.


(3)
响应系统为
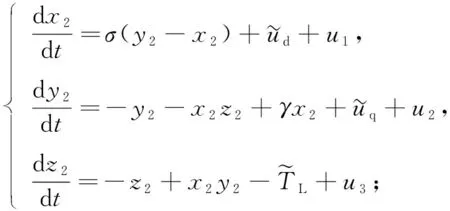
(4)
误差方程为

(5)
对误差方程求导可得

(6)
为保证驱动系统(3)和响应系统(4)实现同步控制,设计控制器方程为

(7)
2.2 系统的稳定性
当电机负载运行时,若控制器满足方程(7),则驱动系统(3)和响应系统(4)全局一致渐近稳定且误差渐近趋于零.

(8)
将式(6)代入式(8)可得

(9)
因此

(10)
即V有界,系统全局一致渐近稳定.
由于V有界,根据Barbalat推论可得
即系统误差渐近趋于零. 因此,驱动系统(3)和响应系统(4)可实现同步.
3 仿真分析及电路实现
3.1 仿真分析

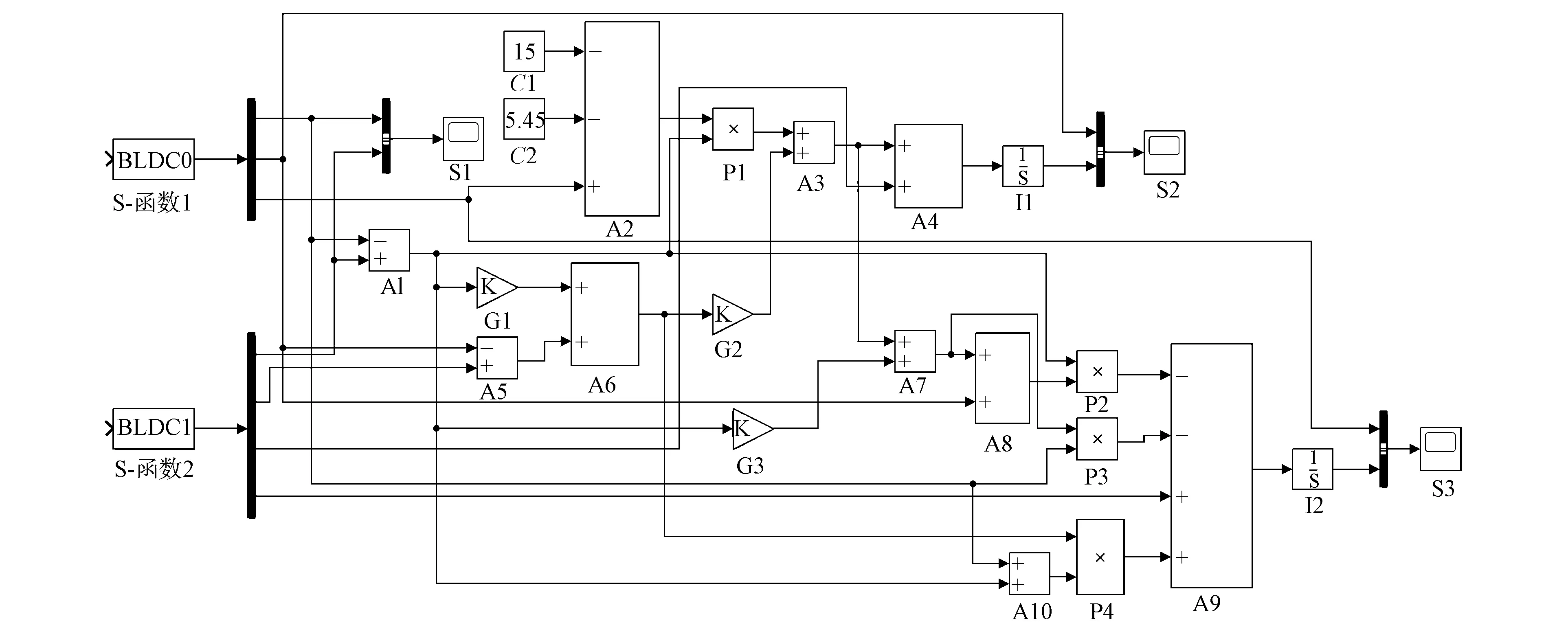
图3 BLDCM混沌同步仿真模型Fig.3 Model of BLDCM chaotic synchronization simulation

图4 (x1,x2),(y1,y2) 和(z1,z2)随时间t的变化曲线Fig.4 Cureves of (x1,x2),(y1,y2) and (z1,z2) with time t
图3中的S-函数1表示驱动系统,S-函数2表示响应系统,A1~A10表示加法器,S1~S3表示示波器,G1~G3表示增益,C1和C2为2个常数,P1~P4为乘法器,I1和I2为2个积分器.
由于驱动系统(3)和响应系统(4)的初始条件不同,因此初始状态运行轨迹不同步. 由图4可见,3个状态变量均在2~4 s即可实现快速稳定同步,响应速度较快. 该反推控制器设计简单,可使BLDCM实现快速同步,并保证系统稳定运行.
3.2 电路实现
电路仿真平台的搭建主要以电压模式电路为主[12-13],存在如下问题: 1) 产生的信号频谱范围较窄,在实际工程中不易实现; 2) 当处理大信号时,输出电压信号的转换速率较低; 3) 在高集成电路设计过程中,采用高功耗、 小尺寸元件会使器件的内部电场增强,影响器件正常工作. 基于CCCⅡ设计的仿真器可解决上述问题,且设计简单,易实现. 因此,采用CCCⅡ搭建BLDCM电路仿真平台,观察混沌与同步现象,具有快速、 宽频、 低功耗和低电压等特点.
根据驱动系统(3)和响应系统(4),选取运算放大器AD844和四象限乘法器/除法器AD734AN为关键器件. 设其他参数值为
C1=C2=C3=10 nF,
R1=R4=R8=R12=1 kΩ,
R2=R3=R5=R10=R19=100 kΩ,
R6=R11=R17=R18=10 kΩ,
R7=100.1 kΩ,R13=4.672 kΩ,R14=0.25 kΩ,
R15=R16=2.5 kΩ,R9=0.2 kΩ.
为验证理论分析及数值仿真结果,利用Multisim平台设计仿真器电路,如图5所示. 其仿真结果如图6所示. 由图6可见,驱动系统(3)和响应系统(4)可实现同步,电路仿真与数值仿真结果一致,因此该同步电路设计正确.
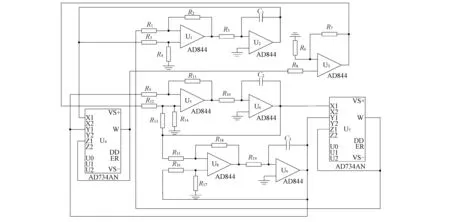
图5 BLDCM混沌系统同步电路Fig.5 Synchronous circuit of BLDCM chaotic system
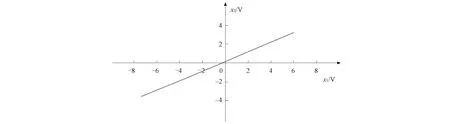
图6 x1和x2的同步电路仿真结果Fig.6 Results of synchronous circuit simulation for x1 and x2
综上,本文从相位图、 分岔图和Lyapunov指数分析了BLDCM的混沌动力特性,并基于Lyapunov稳定性原理设计了反推同步控制器. 通过数值分析与仿真器电路实现,验证了该方法在2~4 s即可快速稳定地实现混沌系统的同步跟踪. 由于反推同步控制器的调整参数较少,设计简便,且状态变量由系统获得,因此在工程上易实现.
猜你喜欢
科技信息·学术版(2021年31期)2021-12-03 05:09:36
科学与财富(2020年3期)2020-04-02 07:09:52
电子制作(2018年19期)2018-11-14 02:37:02
电脑与电信(2018年12期)2018-03-23 02:37:14
电子制作(2017年19期)2017-02-02 07:08:26
电子制作(2016年15期)2017-01-15 13:39:42
北京航空航天大学学报(2016年6期)2016-11-16 01:50:50
交通科学与工程(2015年1期)2015-12-23 11:08:18
计算机工程(2015年4期)2015-07-05 08:28:57
测绘科学与工程(2013年2期)2013-03-11 15:07:29
