
基于三坐标测量机的双频虚拟光栅投影轮廓测量方法
2021-01-16 02:53彭诚张兴权周敬勇
廊坊师范学院学报(自然科学版) 2021年4期
彭诚 张兴权 周敬勇

【摘要】针对被测物体产生的突变部分三维成像不连续问题,提出基于三坐标测量机的双频虚拟光栅投影轮廓测量方法。在三坐标测量机中设置一个试验台,用于控制CCD相机、投影仪等设备的运动方向,相位解算变形光栅图像,得到全测量范围中的相位主值分布与附加相位。CCD相机通过记录虚拟光栅,获取由不同频率调制的变形光栅像与基于等效周期的相位主值分布,完成双频调制相位综合。通过构建物体表面变形条纹相位分布,联立其与被测物体高度分布函数关系,依据解得的双频率综合后高度值偏差,推导出周期整数倍取值条件,实现轮廓三维测量。实验结果表明,该方法保留了突变区域或边沿部分的频谱信息,测得的三维数据准确度较高。
【关键词】三坐标测量机;虚拟光栅;投影轮廓;三维测量
〔中图分类号〕TN247 〔文献标识码〕A 〔文章编号〕1674-3229(2020)04-0060-05
0 引言
几何参数测量是一种基础的长度测量,随着测量理论与技术的不断更新,测量维数从一维、二维提升至三维、多维空间[1]。传统接触式测量方法存在诸多限制,因此,需要研究新的测量方法改善传统测量技术的不足。
文献[2]提出一种无滤波复合光栅投影下在线三维测量方法,用低频条纹相移代替物体运动,使高频条纹相移方向垂直于物体运动方向,经过像素匹配,令各帧高频条纹具有相同光强分布,完成相位计算;文献[3]为了进一步提升检测精度,在三维物体表面的傅里叶变换轮廓术中采用了双频技术,利用投影至被测物体表面上的不同频率区域光栅结构,结合双频技术获取不存在相位模糊的实相。由于上述文献方法无法防止物体突变,导致边沿信息失效,存在测量结果准确度不高的问题。因此,本文提出一种基于三坐标测量机的双频虚拟光栅投影轮廓测量方法。首先,基于三坐标测量机设置一个试验台,运用该平台控制CCD相机、投影仪等设备的运动方向。然后,通过在参考平面上生成两个虚拟光栅来调制被测物体,防止相邻两点相位值发生突变。添加双频率综合阶段,提升等效相位主值突变引起的物体高度起伏幅度,留存频谱信息,确保测量准确性。
1 基于三坐标测量机的试验台搭建
近年来,三坐标测量机已经被广泛应用于各种测量领域,如航天、电子、机械制造等领域[4]。与常规形状规则的被测物体不同,本文主要考虑到测量物体的突变等不规则部分,目的是准确分辨出被测物体的位置、形态等特点,因此需要借助于一个性能较好的试验台对测量设备进行有效控制[5]。本文利用三坐标测量机设计一个测量软件,并重点对该软件中的测量模块进行设计,该模块用于测量被测物体变位系数等参数,能够对离散分布的、不规则的物体进行测量。CCD摄像机安置于三坐标测量仪的导轴上,三坐标测量仪可以获取不同位置的被测物体图像,并依据双目视觉原理实现对CCD相机、投影仪等设备运动方向的控制[6]。
2 双频虚拟光栅投影轮廓三维测量
2.1 虚拟光栅调制解调
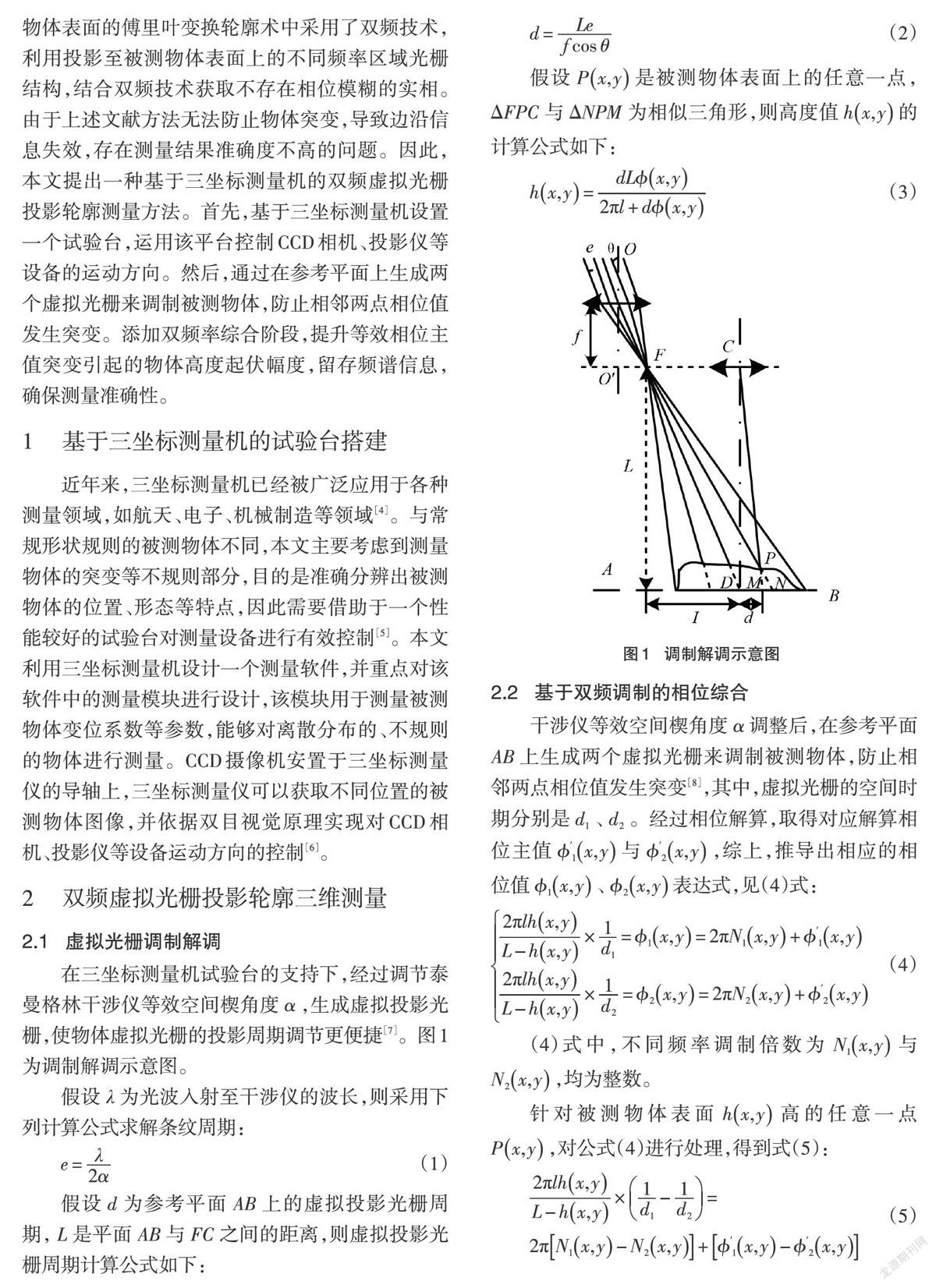
在三坐标测量机试验台的支持下,经过调节泰曼格林干涉仪等效空间楔角度α,生成虚拟投影光栅,使物体虚拟光栅的投影周期调节更便捷[7]。图1为调制解调示意图。
假设λ为光波人射至干涉仪的波长,则采用下列计算公式求解条纹周期:
e=λ/2α
假设d为参考平面AB上的虚拟投影光栅周期,L是平面AB与FC之间的距离,则虚拟投影光栅周期计算公式如下:
假设P(x,y)是被测物体表面上的任意一点,△FPC与△NPM为相似三角形,则高度值h(x,y)的计算公式如下:
2.2 基于双频调制的相位综合
干涉仪等效空间楔角度α调整后,在参考平面AB上生成两个虚拟光栅来调制被测物体,防止相邻两点相位值发生突变[8],其中,虚拟光栅的空间时期分别是d1、d2。经过相位解算,取得对应解算相
2.3 相位解算与高度映射
若滤除条纹光强分布中的高频条纹频谱成分,获取低频变形条纹相位分布,将导致物体突变区域或者边沿的部分频谱信息丢失,影响测量准确性。为解决该问题,构建物体表面变形条纹相位分布表达式(9),用于描述被测物体高度产生的相位变化。
高频条纹方向垂直于低频条纹方向,物体高度无法进行调制,即物体表面与参考平面的高频条纹相位是固定的,因此,被测物体高度分布函数h(x,y)与△φ(x,y)之间的关系表达式为:
2.4 测量精度评估
投影光线聚集点F与相机镜头中心C之间的距离l、参考平面AB与FC之间的距离L在经过频率综合后,两距离偏差不变,主要以相位值φ(x,y)对测量精度影响较大。
假设△φ表示每次精度测量的相位测量最大偏差,结合l≥d与式(4)、(6),微分处理式(3),推导出下列计算公式,求解经过双频率综合的高度值偏差[9]:
上式中,双频综合后的相位值偏差为△φe(x,y)。结合de≥d1,d2可知,经过双频综合处理的测量精度有所上升。
根据式(4)可以看出,当N1(x,y)、N2(x,y)两者之一得到确定,就能够获取近似单频率测量精度的高度值。已知N1(x,y),假定h3(x,y)为经过综合处理的高度测量值,φe(x,y)为相应相位值,将其与周期d1一并代入方程组(4),通過变换整理得到化简表达式(12):
上式中,周期d1的整数倍为M(x,y),相位余量为R(x,y)。
在方程组(4)的第一个公式中,代入基于周期d1的高度测量值h1(x,y),通过求取其与上式的差值,得到表达式(13):
当上式解值是0时,测量准确度较高;反之,相位测量偏差值即为上式解值。若所得测量偏差与单频率测量偏差存在较大差异[10],则结合上列两式得到表达式(14):
虚拟调制光栅周期d1、d2的选取条件如表达式(15)所示:值条件表达式(16):
3 三维测量方法模拟实验
3.1 实验设备
利用自主研发的计算机软件,完成光栅条纹投射、变形条纹图像采集、计算机图像处理、轮廓三维测量等。实验设备的相关信息如表1所示。
3.2 準备阶段
镜头焦距选用25mm标称值,测距区间1200-1500mm,测量范围350mm×300mm。根据空间映射原理,构建轮廓映射模型的n阶多项式表达式,如下列矩阵所示:
上式中,多项式分别为pi、qi与ri,i-0,1,…,m-1。由此统计出表2所示的系数矩阵。
3.3 三维成像效果对比分析
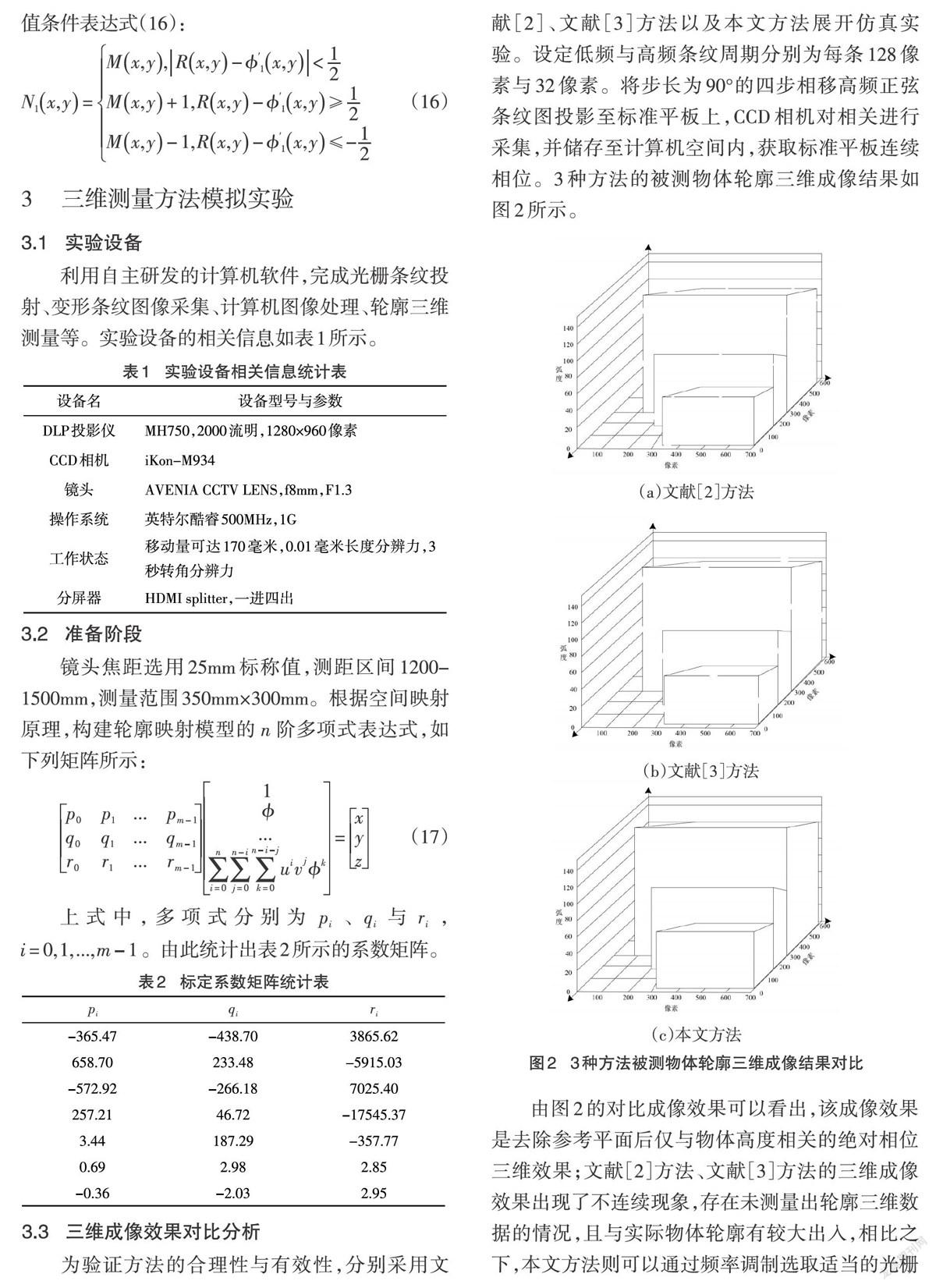
为验证方法的合理性与有效性,分别采用文献[2]、文献[3]方法以及本文方法展开仿真实验。设定低频与高频条纹周期分别为每条128像素与32像素。将步长为90°的四步相移高频正弦条纹图投影至标准平板上,CCD相机对相关进行采集,并储存至计算机空间内,获取标准平板连续相位。3种方法的被测物体轮廓三维成像结果如图2所示。
由图2的对比成像效果可以看出,该成像效果是去除参考平面后仅与物体高度相关的绝对相位三维效果;文献[2]方法、文献[3]方法的三维成像效果出现了不连续现象,存在未测量出轮廓三维数据的情况,且与实际物体轮廓有较大出入,相比之下,本文方法则可以通过频率调制选取适当的光栅周期与整倍数。
3.4 三维测量数据对比分析
对所得的三维测量结果进行四舍五人的取整处理,将多次人工测量取均值作为轮廓的实际准确尺寸数据,从所得三维测量数据组中选取3组结果,整理得到各方法的轮廓三维测量数据,如表3所示。
分析表3可知,本文方法因添加了双频率综合阶段,构建了物体表面变形条纹相位分布,所以保留了物体突变区域或者边沿部分的频谱信息,使得到的三维测量数据具有更理想的准确度,更趋近于人工测量的实际标准数值,偏差极小。
4 结语
本文提出一种基于三坐标测量机的双频虚拟光栅投影轮廓测量方法,分析实验结果可知,该方法的物体轮廓三维成像效果较好,能够获取完整的成像结果,并且测得的数据与实际数据的差距较小,说明该方法的测量结果更可靠。今后工作中会继续探索出综合性能优化的轮廓三维测量技术,既能够保证测量速度,又可以获取高测量精度,结合3DMAX等三维建模软件,构建双频虚拟光栅投影轮廓测量系统,提供与实际更贴合的可靠数据。
[参考文献]
[1]祝连庆,雷李华,王道档.“光学三维测量技术”专栏序言[J].红外与激光工程,2019,48(5):9-10.
[2]彭旷,曹益平,武迎春.一种无需滤波的复合光栅投影的在线三维测量方法[J].光学学报,2018,38(11):157-166.
[3]张松松,黄海松,姚立国.双频FTP对复杂三维面型的轮廓检测[J].组合机床与自动化加工技术,2019,23(3):91-93.
[4]刘春杰,彭增辉,李松振,等.非等光强正交圆偏振光对液晶偏振光栅衍射特性的影响[J].液晶与显示,2018,33(2):144-149.
[5]徐建亮,魏小华,叶志斌.基于椭圆形滤波器的三维数据逆向建模技术[J].工具技术,2018,52(8):57-60.
[6]史耀群,邓林嘉,王朝旭,等一种基于结构光条纹投影的微小物体测量系统[J].应用光学,2019,40(6):1120-1125.
[7]史永丰,程婷,张育浩,等.一种改进的基于微分方程的曲面求交跟踪算法[J].图学学报,2019,40(2):80-85.
[8]刘福权,赵焱,吴振金,等.典型折反式超短投射比投影显示系统的光电测试研究[J].光学技术,2018,44(1):56-62.
[9]张春艳,李大胜.两面投影矩形的空间构形分析[J].廊坊师范学院学报(自然科学版),2019,19(1):21-25+30.
[10]高嘉乐,吕辰刚,戚皓,等.基于双频相移的机器视觉自适应照明测量方法[J].激光与光电子学进展,2019,56(3):220-226.
[收稿日期]2021-04-21
[基金项目]2020年省级示范课程项目“合肥职业技术学院《零部件测绘与检测技术》教学示范课程"(2020sfk006);安徽省高校自然科学研究项目“基于逆向工程的产品建模与数控加工研究”(KJ2020A0989)
[作者简介]彭诚(1986-),男,硕士,合肥职业技术学院副教授,研究方向:机械设计测量、液压传动控制。
