深度置信网络迁移学习的行星齿轮箱故障诊断方法
2021-01-16 09:52陈仁祥胡小林唐林林
振动与冲击 2021年1期
陈仁祥, 杨 星, 胡小林, 李 军, 陈 才, 唐林林
(1. 重庆交通大学 交通工程应用机器人重庆市工程实验室, 重庆 400074; 2. 重庆大学 机械传动国家重点实验室, 重庆 400030;3. 重庆工业大数据创新中心有限公司, 重庆 400056; 4. 重庆华数机器人有限公司, 重庆 400714)
行星齿轮箱广泛应用于风电机组、船舶等大型工程机械中,恶劣的运行环境导致其关键部件在交变载荷作用下极易发生故障[1-2],对其进行故障诊断能及时检测并排除运行过程中出现的突发问题,有效避免重大事故。
目前,国内外学者主要利用数据驱动实现行星齿轮箱故障诊断[3]。为自动提取故障特征,深度神经网络被运用到故障诊断领域,Lu等[4]利用堆叠自动编码器实现了旋转机械的故障诊断。Jing等[5]提出了深度卷积神经网络(DCNN)的自适应多传感器数据融合方法,并自适应地优化不同融合级别的组合,用于行星齿轮箱的故障诊断。Zeng等[6]将信号S变换时频图作为CNN输入用以提取相应故障特征以识别齿轮箱故障。Chen等[7]提出了一种多维特征降维方法,从而得到低维特征向量作为DBN多分类器的输入,实现了对行星齿轮箱太阳轮故障状态识别。Chen等[8]利用离散小波变换和CNN实现了行星齿轮箱的故障诊断。
以上方法均取得了不错的效果,但必须满足两个条件:训练和测试数据独立同分布且训练数据足够多。而实际工程中,运行工况多变,获得的样本难以满足以上两个条件,直接影响故障诊断效果。
迁移学习[9]能利用已有的知识帮助解决目标任务存在的问题,实现不同领域数据的识别和预测。其中,已有的知识被称为源域,新任务领域被称为目标域。由于迁移学习能学习目标样本和已有知识之间的相关性。Rajagopal[10]等将迁移学习应用于头部姿态分类,目前也已有将其应用在故障诊断领域,雷亚国等[11-13]将迁移学习运用在故障诊断领域,取得了不错的效果,但需先人工提取特征,再利用迁移学习实现诊断,这种方式依赖于人的经验,且特征提取和迁移学习均有多种算法,两者相对独立,匹配程度难以评价,影响诊断结果的可靠性。
针对以上问题,在目标标记样本不足时,通过结合迁移学习方法在解决不同领域样本的优势,提出深度置信网络迁移学习的行星齿轮箱故障诊断方法。该方法将辅助样本的原始信号频谱作为DBN网络的输入,逐层更新网络的权重和偏置值对输入信号进行分级表达,以获得其分布式特征表达,得到基于辅助标记样本的DBN预模型。再用少量的目标标记样本微调DBN预模型的网络权重和偏置值,实现DBN网络权重和偏置值从源域到目标域的迁移以适应新的目标样本识别,最终达到提高目标域样本故障识别准确率的效果。
1 深度置信网络迁移学习原理
深度置信网络迁移学习过程分为两个部分:辅助标记样本下的网络预训练以建立DBN预模型和少量目标标记样本由高层到低层的有监督微调DBN预模型。具体结构如图1所示。
样本数据集定义为
Ds={Xs,Ts}
(1)
Dt={Xt,Tt}
(2)
式中:Ds、Dt分别为辅助样本集和目标样本集;Xs、Xt为辅助样本和目标样本;Ts、Tt为辅助样本和目标样本对应的标签。
首先将辅助样本Ds用于DBN网络的预训练,权重和偏置值更新规则如下:
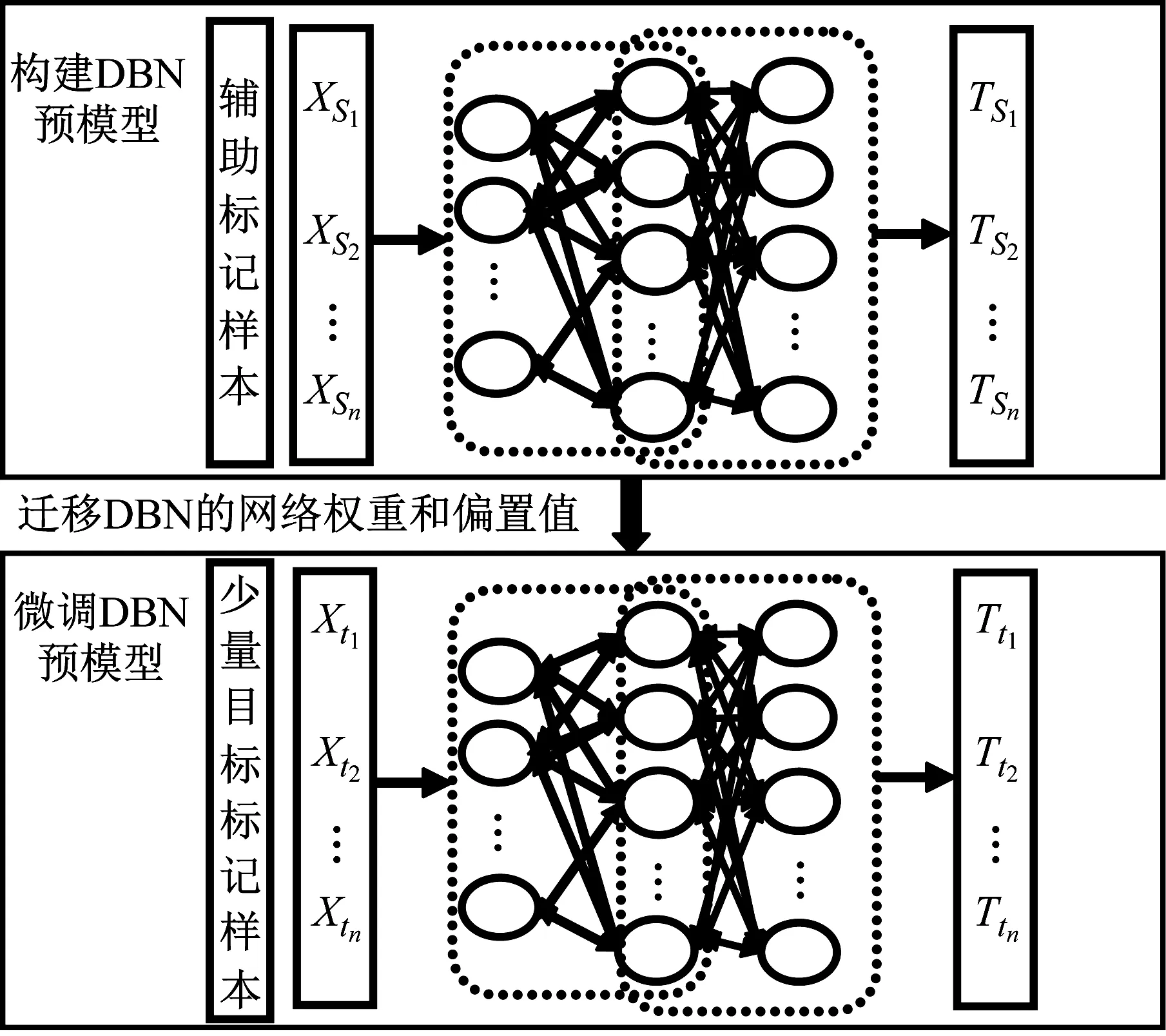
图1 DB迁移学习的结构
受限玻尔兹曼机[14](Restrict Boltzmann Machine,RBM)的能量表达式为
(3)
式中:参数集θ={W,b,c},vi为第i个可视层神经元状态;hj为第j个隐含层神经元状态;bi为可视层神经元i的偏置,cj为隐含层神经元j的偏置;m、n分别为可视层和隐含层神经元个数;Wij为连接可视层神经元i和隐含层神经元j的权重。
RBM的隐层节点hj被显层节点vi激活的概率为
(4)
显层节点vi也能被隐层节点hj激活,激活概率为
(5)
其中,δ通常取Sigmoid函数。
采用随机梯度上升法计算似然函数lgP(v,h)的函数最大值,得到每个RBM的参数集θ更新公式为
ΔWij=E1(vihj)-E2(vihj)
(6)
Δbi=E1(vi)-E2(vi)
(7)
Δcj=E1(hj)-E2(hj)
(8)
Δθ={Δw,Δb,Δc}
(9)
θt+1=θt+ηΔθ
(10)
式中:η为学习率;E1(vihj)为训练集中观测数据期望;E2(vihj)由吉布斯采样得到,为模型确定的分布期望。

(11)
(12)
得到预训练的网络连接参数θs由每层RBM的连接参数组成
(13)
(14)


(15)
网络最终参数θt更新的公式如下
θt=θs+Δθ
(16)
(17)

通过少量目标样本数据Dt的有监督微调,以更新网络参数集,实现将源域训练的网络权重和偏置值与目标域共享部分θr迁移到目标域训练的网络权重和偏置值中,引入目标域训练网络中区别于源域特定的权重和偏置值部分,最终得到适应于目标域数据的网络权重和偏置值θt。
θt=(θout,θN,…,θ2,θ1)
(18)
2 DBN迁移学习的行星齿轮箱故障诊断流程
DBN迁移学习的行星齿轮箱故障诊断方法过程如下:首先计算源域和目标域数据的原始信号频谱,使用源域标记样本训练集预训练DBN网络的权重和偏置值,得到DBN预模型。再用少量目标标记样本数据进行网络参数的微调,最终获得适应目标样本领域数据故障诊断的网络权重和偏置值,从而得到DBN迁移学习的行星齿轮箱故障诊断网络。
诊断流程如图2,具体步骤如下:
步骤1样本获取与预处理。采集得到不同工况故障数据,分别计算频谱,并将它们频谱数据的幅值归一化到[0,1]的范围,分别获得其源域和少量目标域训练标记样本,和目标域测试样本,经过处理得到的样本输入范围为[0,1],在此激活函数选择sigmoid函数;
步骤2源域数据样本下DBN网络预模型的训练。分别设置深度置信网络的RBM个数N、隐含层单元数、初始化权重和偏置等超参数,并输入其源域样本数据用贪婪算法逐层训练得到每一个RBM的初始参数,将上一个RBM的输出作为下一个RBM的输入,直到N个RBM的训练完成,再用源域标签有监督微调DBN网络,得到DBN的网络预模型。
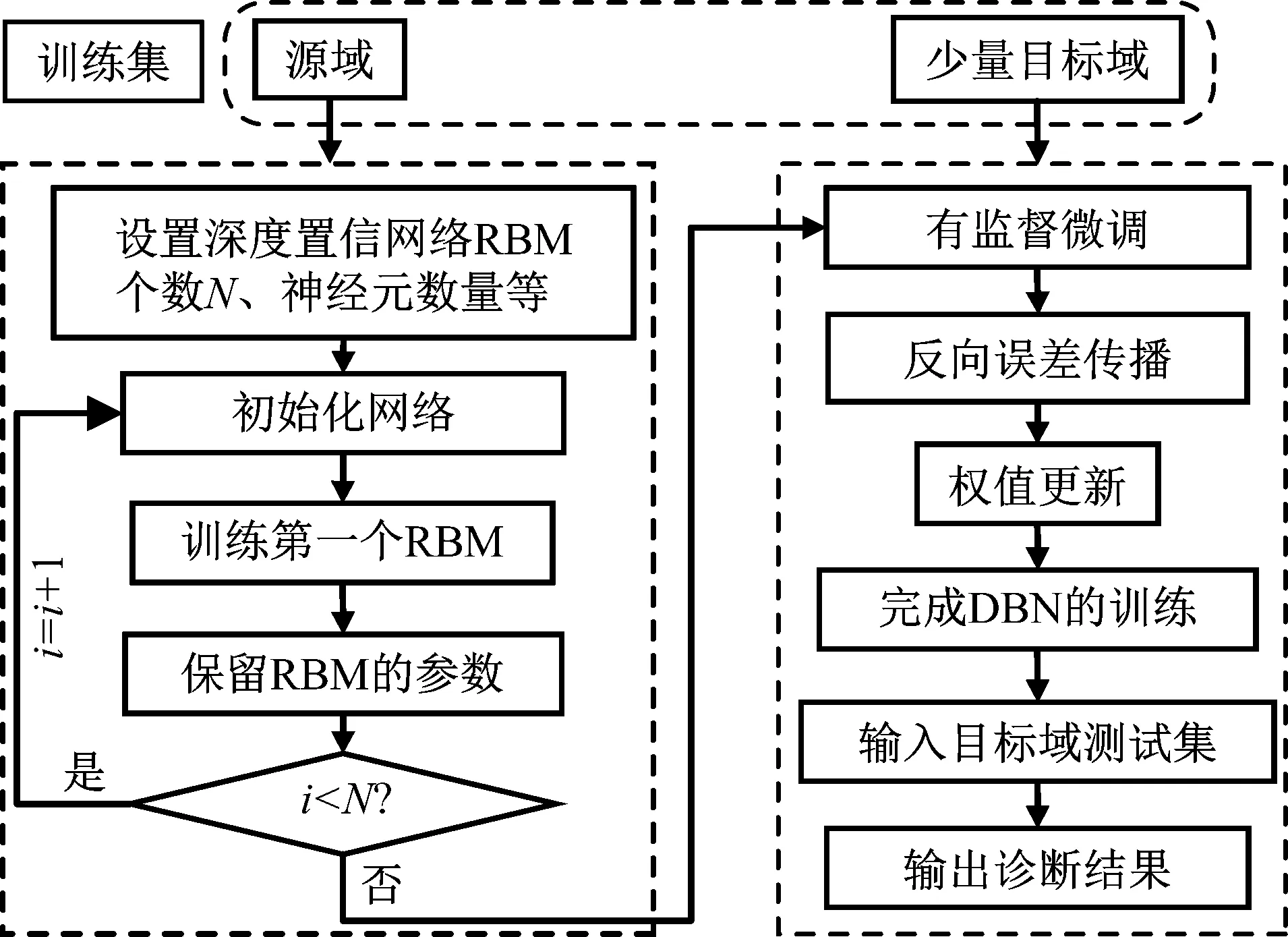
图2 诊断流程
步骤3目标域少量标记样本有监督微调DBN预模型。利用DBN预模型网络权重和偏置值,以其最后一层的RBM输出作为输入给softmax分类器,根据故障类别设置softmax多分类器输出层神经元个数,将少量的目标域标记样本作为根据标签样本,softmax多分类器采用反向误差传播算法(BP)对整个DBN得到网络预模型的每一个RBM的权重、偏置进行微调,完成对网络参数的训练,最终获得适应目标样本领域数据故障诊断的网络权重和偏置值,从而实现目标域待测数据的故障诊断。
步骤4输出诊断结果。输入目标域测试样本,最终输出网络诊断结果。
3 实验验证
首先,以行星齿轮箱的故障来验证本文所提方法的可行性和有效性,实验数据采集于动力传动故障诊断综合实验台,实验平台见图3(a)。分别对太阳轮和行星轮人工加工太阳轮齿面磨损(TM)、太阳轮缺齿(TQ)、太阳轮断齿(TD)、行星轮缺齿(XQ)、行星轮断齿(XD)五种故障类型,太阳轮的故障类型如图3(b)所示。
采样频率设置为30720Hz。分别获得太阳轮齿面磨损(TM)、太阳轮缺齿(TQ)、太阳轮断齿(TD)、行星轮缺齿(XQ)、行星轮断齿(XD)五种故障类型的数据,得到表1中的三种工况数据,每类故障类型获得180个样本,每个样本的长度为1 024个点。
图4为行星齿轮箱每类故障原始信号及其频谱对比图,观察该图,不同信号在频域表现出的差异更易观察和比较,其中太阳轮故障时原信号的能量集中在低频部分,而行星轮故障时能量主要分布在高频部分,不同故障类型能量分布存在明显差异。图4后三组图为太阳轮缺齿时在不同转速下的时域及频域对比,虽然为同一故障但由于工况不同,但频谱能量和频谱结构明显不同,是故障诊断的难点。
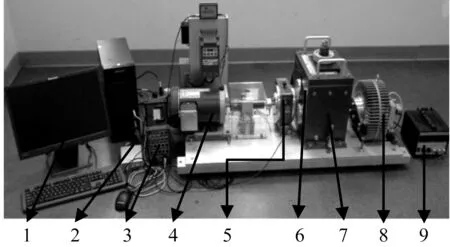
1. 计算机; 2. 编码器; 3. 采集卡; 4. 电机; 5. 行星齿轮箱;6. 传感器; 7. 直齿齿轮箱; 8. 负载装置; 9. 负载控制装置

(b) 齿面磨损

(c) 断齿

(d) 缺齿
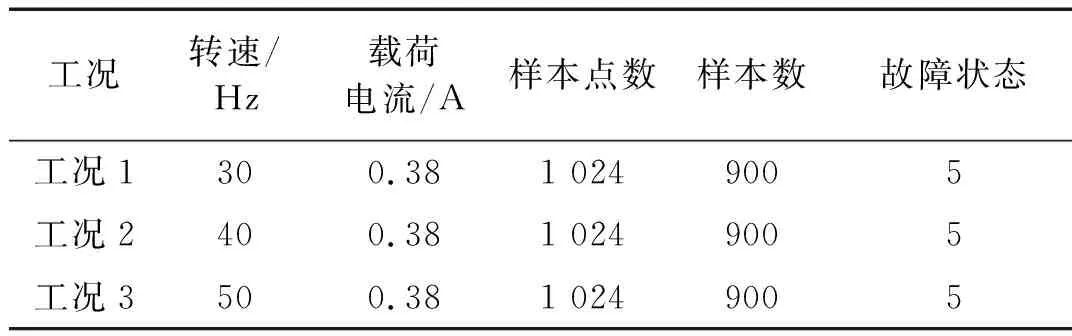
表1 数据信息
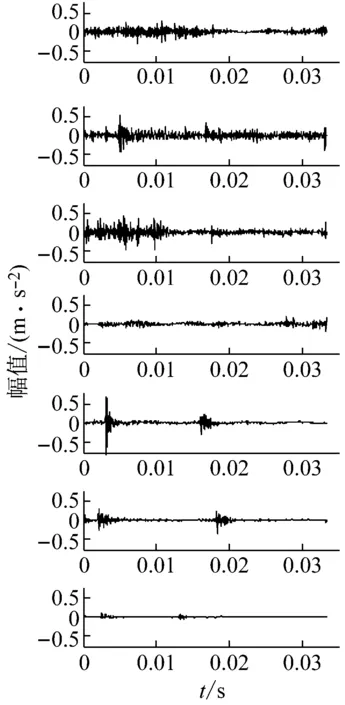
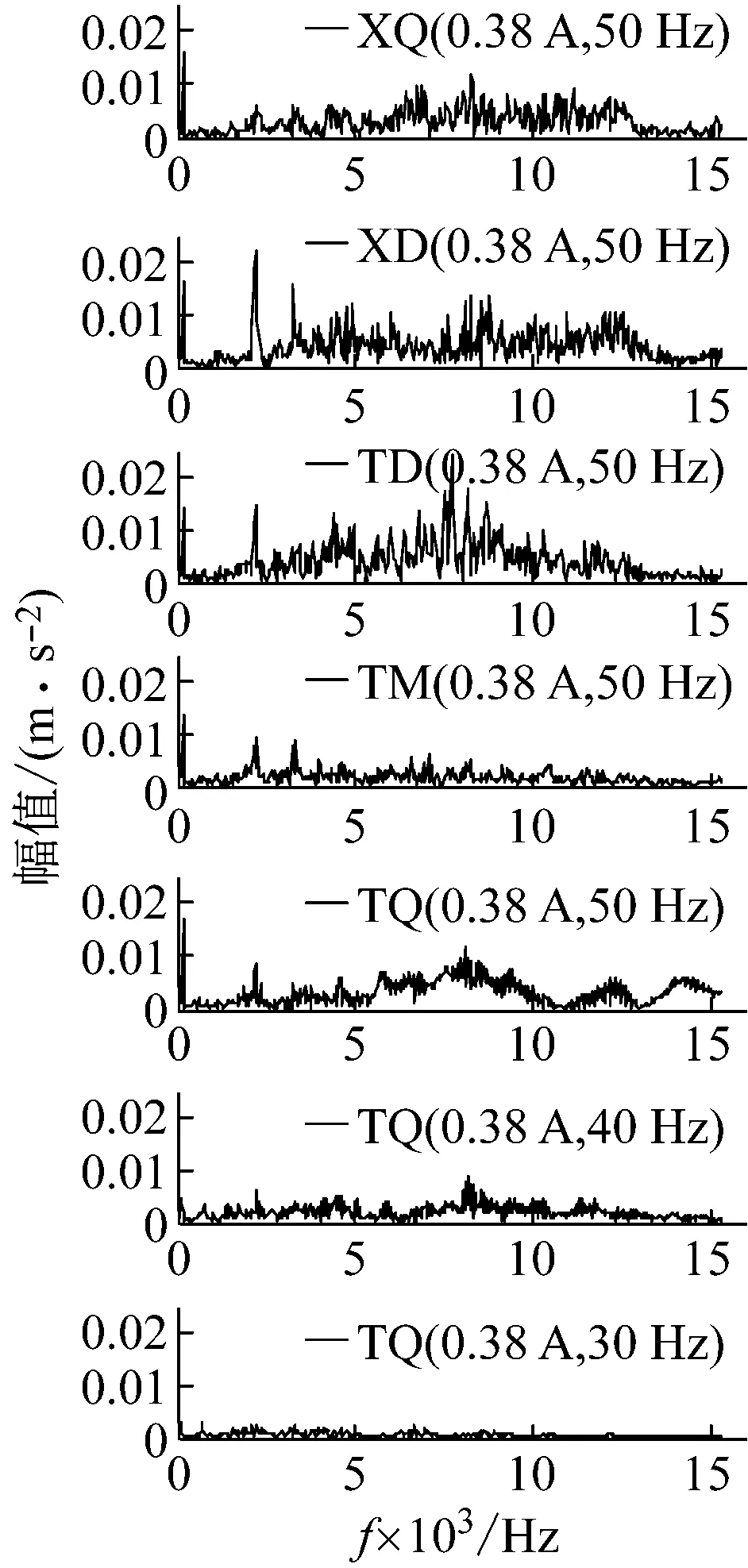
图4 原始信号及其频谱
3.1 DBN诊断效果受样本影响分析
首先,证明目标域训练样本数量大小对DBN的诊断效果有影响,在目标域工况为工况3的情况下,目前DBN网络结构与超参数设置尚无成熟理论[14],本文所提方法的输入为512个频谱值,故障类型为5,参考文献[14-15]并经过前期实验,采用DBN网络结构为512-100-50-5,学习率α=0.05,动量m为0.9。在每类故障类型的180个数据样本中随机抽取不同个数的样本作为训练样本,剩余的样本中随机抽取90个作为测试样本,诊断结果如图5所示。
图5 不同数量训练样本下的准确率
图5为目标域不同数量训练样本下的准确率。由图5可知,在目标域训练样本数量不满足DBN网络训练要求时,DBN网络的诊断效果不佳。随着训练样本数量增加,最终的诊断率提高,当训练样本数量满足网络训练要求时,DBN网络的诊断准确率达到97%以上。
再证明训练数据和测试数据不满足独立同分布时对DBN的诊断效果有影响,将工况1作为训练样本,工况3作为测试样本,诊断效果如表2所示。

表2 不同工况下行星齿轮箱故障状态识别结果
最后,将工况1作为辅助样本和少量目标工况3直接用于训练,目标工况3未标记样本用于测试,结果如表3所示。诊断效果依然不佳且没有提升,还有些许下降,这是由于获得数据不满足训练和测试数据独立同分布且目标训练数据充足的条件,两种工况下的训练数据间相互干扰,影响诊断效果。

表3 辅助和目标样本训练下DBN模型分类准确率
3.2 权重、偏置值迁移和特征提取能力分析
为验证所提方法网络权重和偏置值的迁移效果,将工况2数据作为辅助样本集,分别将工况1和工况3数据作为目标域样本集。辅助样本集每类故障在180个样本中随机选取90个样本作为测试集,在目标域样本集中随机选取少量标记目标样本作为训练集,少量目标域训练集每类故障状态分别选取6、10、14个,再在剩余的目标域中每类故障类型分别随机选取90、120作为目标域测试集。这里的网络输入依然为512个频谱峰值,故障类型为5,采用DBN网络结构为512-100-50-5,学习率α=0.05,动量m为0.9。
首先,为验证所提方法训练得到的网络权重和偏置值中存在与源域预训练网络共享的权重和偏置值。在微调目标样本数量为每类故障个数6个时,逐层将两种目标域工况1和工况3得到的网络权重和偏置值和源域工况2训练所得的网络预模型中的权重和偏置值做差,并将其变换成一维矩阵,其中网络两层的权重和偏置值的变化值和变化范围如图6和表4所示。
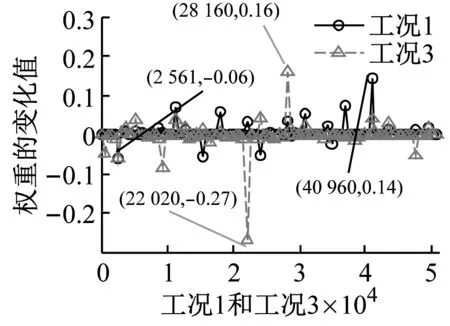
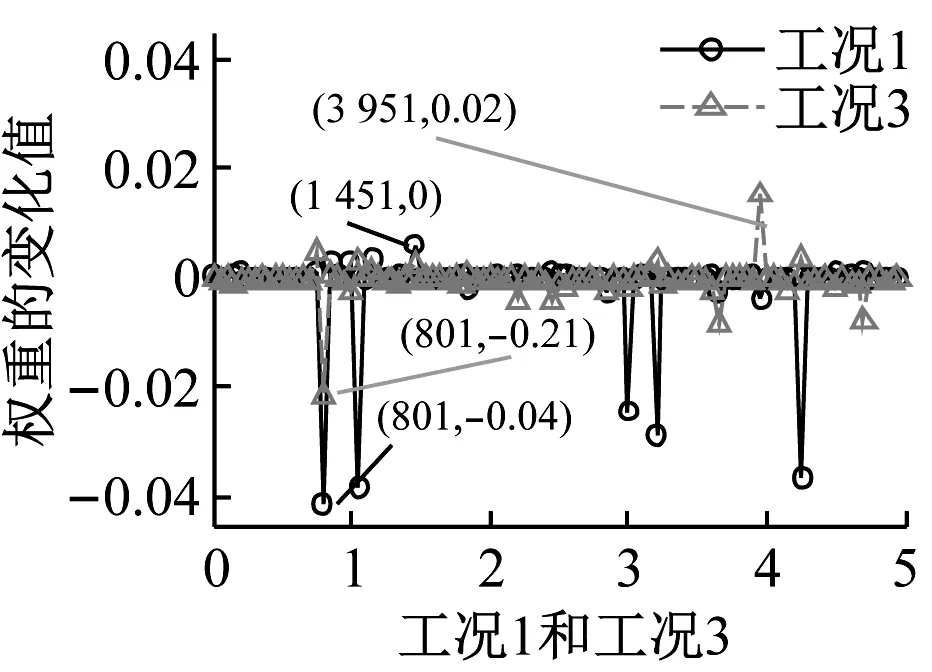
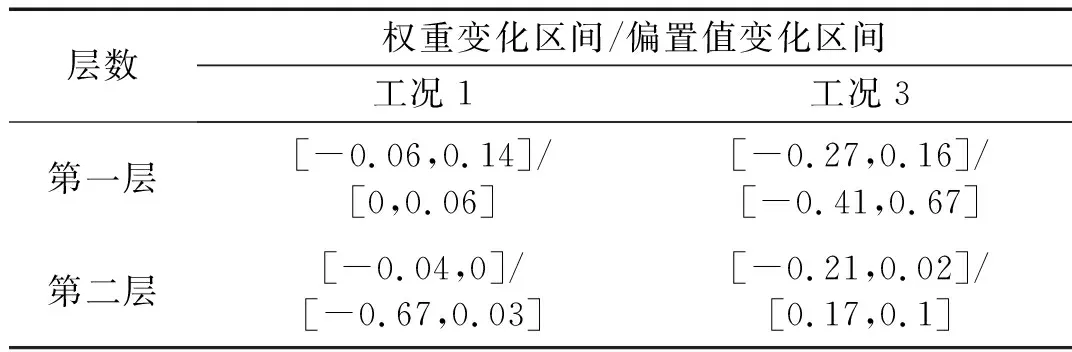
表4 逐层权重和偏置值的变化区间
观察图6和表4可知,目标工况1和工况3中训练的网络每层所得的权重和偏置值中均存在与辅助样本预训练网络的权重和偏置值变化很小的部分,这部分的权重和偏置值应属于源域训练所得的网络权重和偏置值与目标域训练所得的网络权重和偏置值共享的部分,需要迁移到最终网络的权重和偏置值中。同时,针对不同的目标工况1和工况3,权重和偏置值各自都有变化值较大的部分,这部分应属于前文所指目标域训练网络中分别区别于源域特定的权重和偏置值部分,是通过少量目标样本微调训练更新网络参数集引入此部分权重和偏置值,最终得到适应于目标域数据故障分类的网络权重和偏置值。
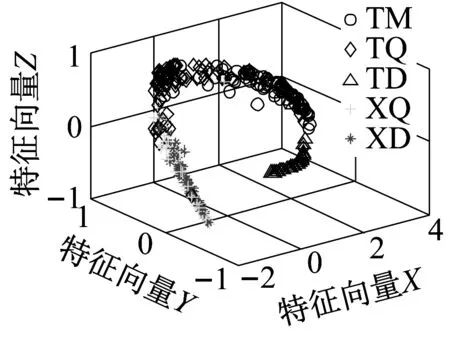
为进一步对比所提方法和DBN的特征提取能力,训练样本为每类故障状态分别选取6、10、14个,测试样本为每类故障在状态为90个的情况下,所提方法提取到的特征和DBN进行对比。DBN方法在训练样本为每类故障状态分别选取6、10、14个情况下的特征图分别简称“DBN6”、 “DBN10” ,“DBN14”,所提方法在目标训练样本为每类故障状态分别选取6、10、14个情况下的特征图分别简称“所提方法6”、 “所提方法10” ,“所提方法14”,结果如图7所示。
图7为所提方法和DBN方法的特征提取对比图。由图7可知,“所提方法6”、 “所提方法10” 和“所提方法14”提取到的特征每类之间集聚性和区分度均高于“DBN6”、 “DBN10” 、“DBN14”,所提方法较DBN方法能提取更好的特征。且所提方法随目标训练样本的增加,特征提取的效果明显增加。综上,所提方法较DBN方法能提取更好的特征,且随训练目标标记样本增加,效果越佳。
(a) DBN6
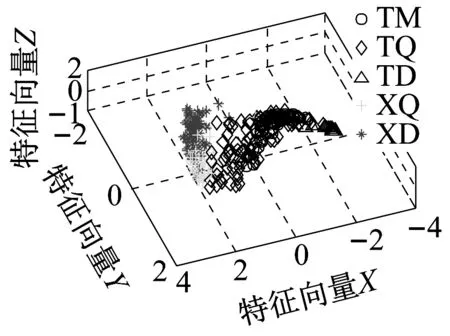
(b) 所提方法6
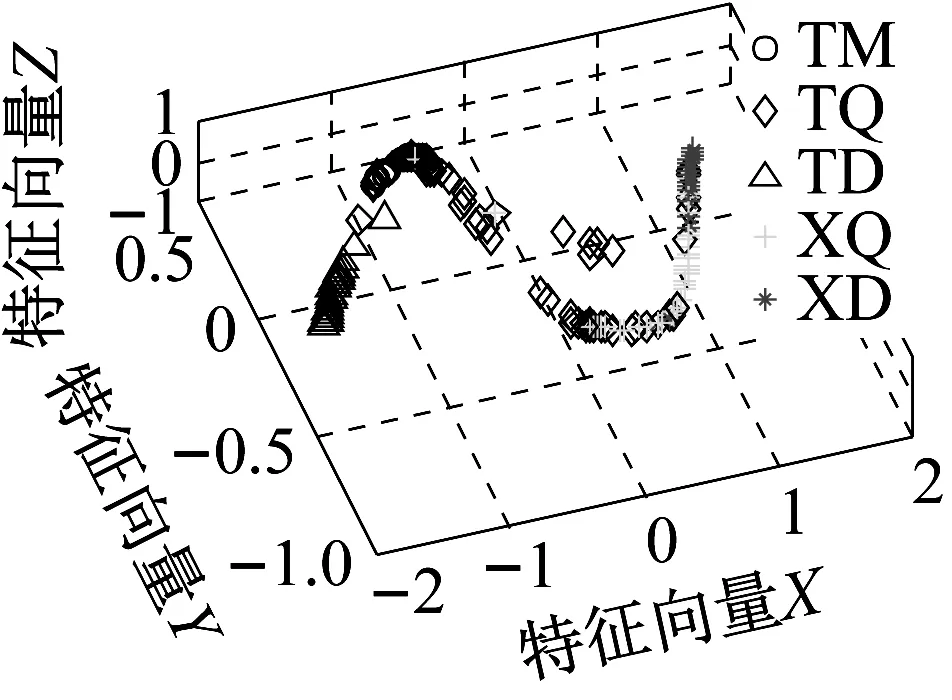
(c) DBN10
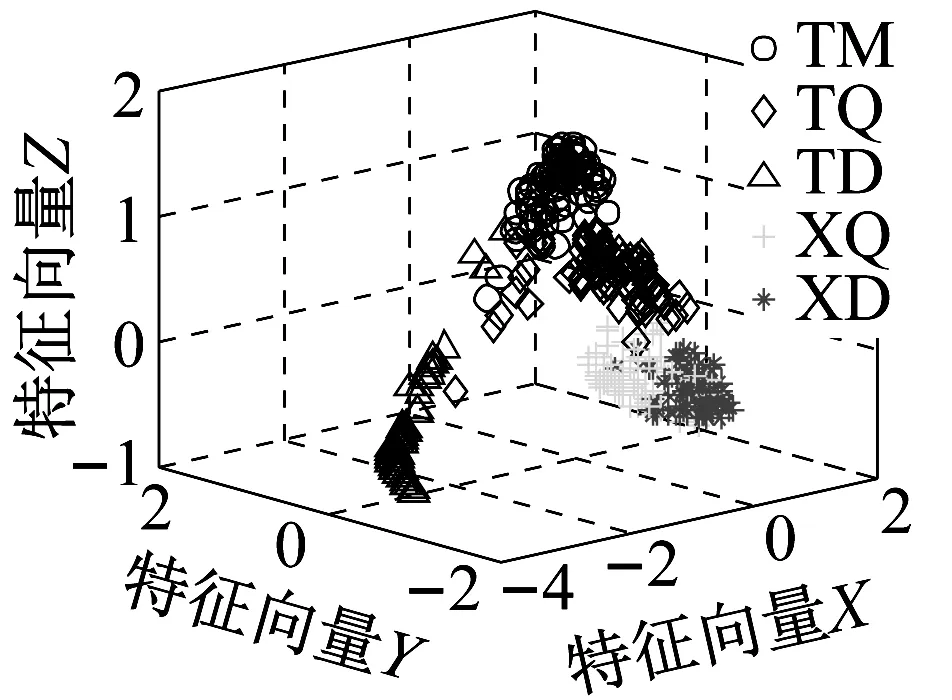
(d) 所提方法10
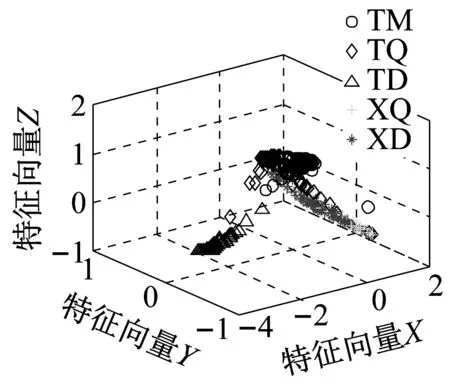
(e) DBN14
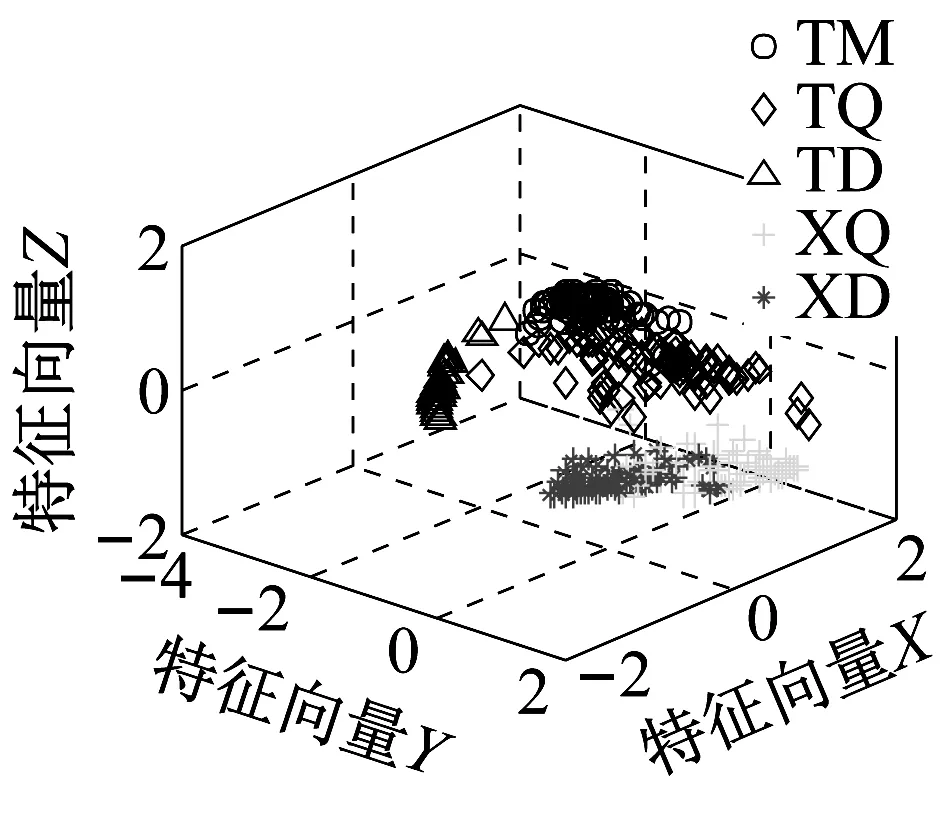
(f) 所提方法14
图8为所提方法与DBN迭代误差曲线对比。由图可以看出,不同目标训练样本数下网络的最终迭代误差都为零,训练好网络所提方法所需要的迭代次数明显低于DBN,所提方法所需训练网络的迭代次数更少。
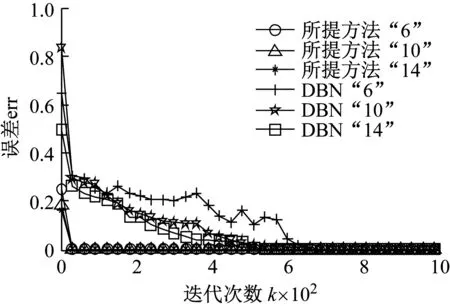
图8 迭代误差对比
3.3 识别率对比及交叉实验验证
分别应用传统的机器学习KNN和SVM、深度学习方法DBN和SAE、迁移学习方法TCA、论文所提方法对行星齿轮箱进行故障诊断。KNN和SVM的输入为提取的时频特征[16],将辅助样本和少量目标样本用于训练,目标样本用于测试。
表5~表10分别为所提方法、KNN、SVM、DBN、SAE、TCA的故障识别准确率。由表5可知,目标训练样本有限的条件下,所提方法准确率达到了90%左右,诊断效果良好。
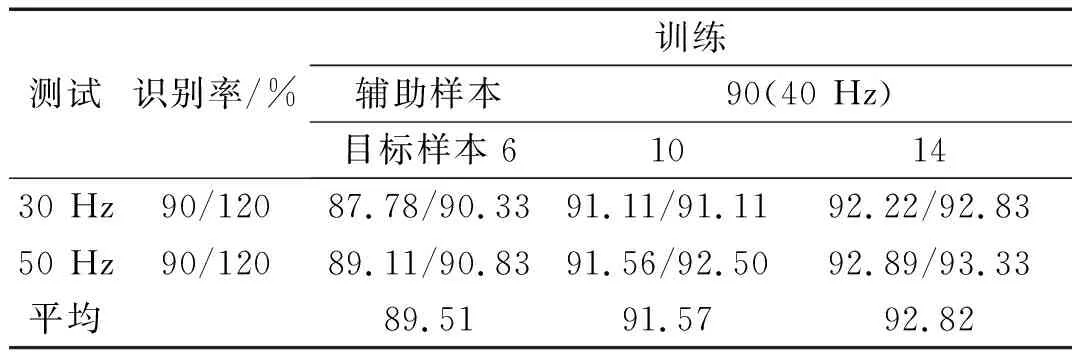
表5 所提方法故障识别准确率(1)
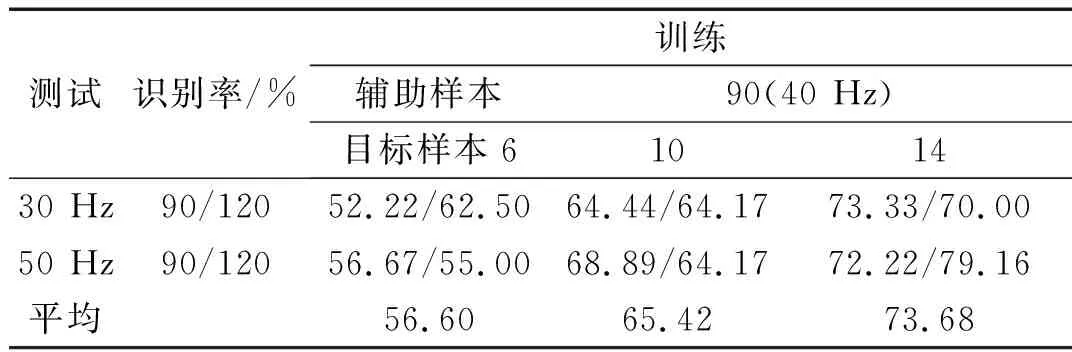
表6 KNN故障识别准确率
表11为样本有限下的平均识别准确率对比,观察表11,随着目标训练样本个数增加,故障识别准确率也随之上升。特别在目标训练样本很少时,目标训练样本为6时,本文所提方法就有了89.51%的识别率,远高于KNN的56.60%、SAE的73.35%、DBN的69.76%、SVM的77.57%和TCA的80.92%。综上所述,本文所提方法在目标训练样本有限下故障诊断效果更加高效且在较少目标域训练样本时就能达到较高的识别效果。
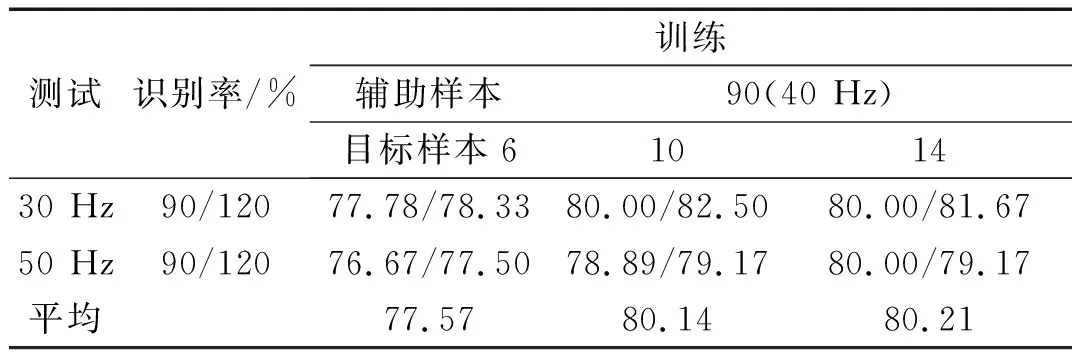
表7 SVM故障识别准确率
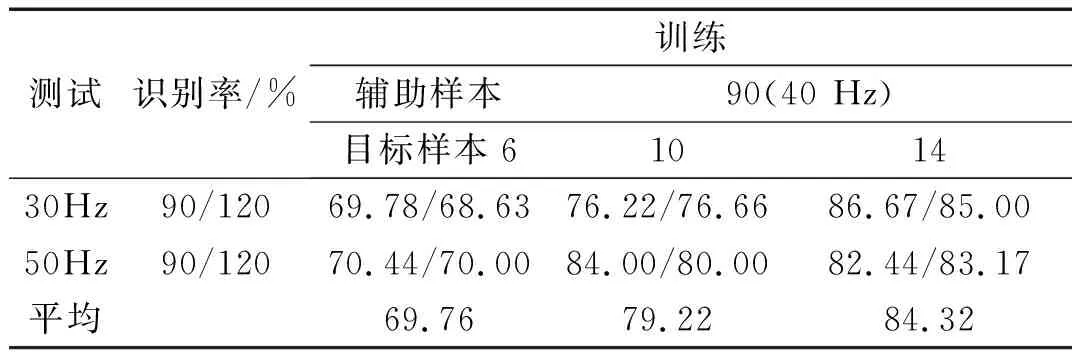
表8 DBN故障识别准确率
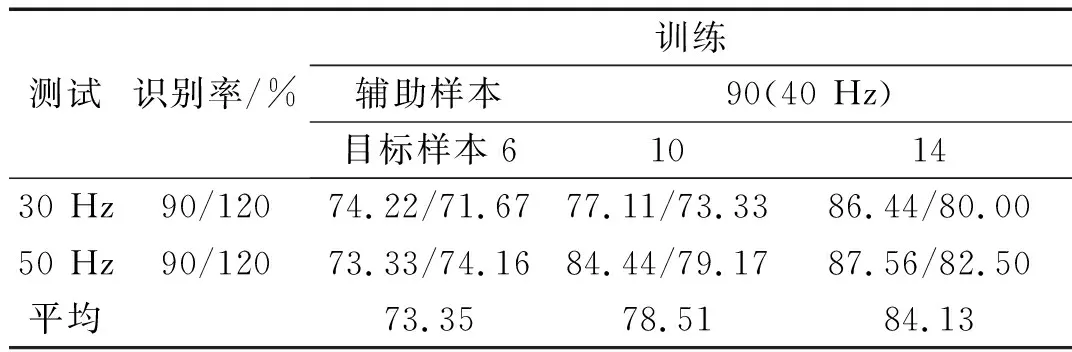
表9 SAE故障识别准确率
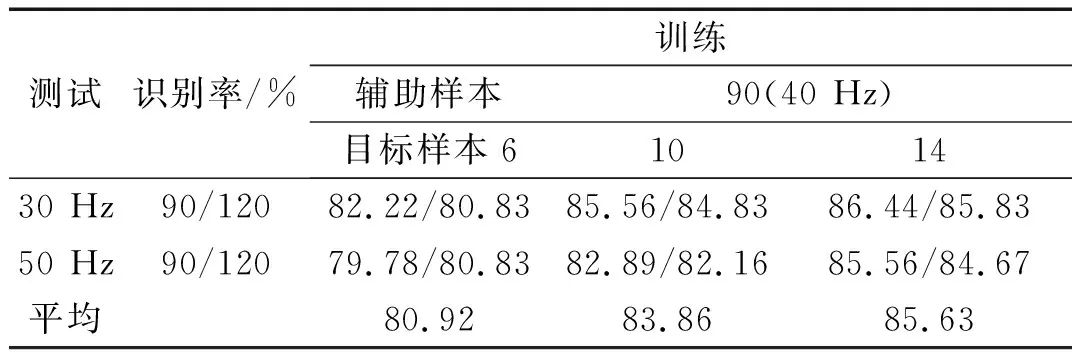
表10 TCA故障识别准确率
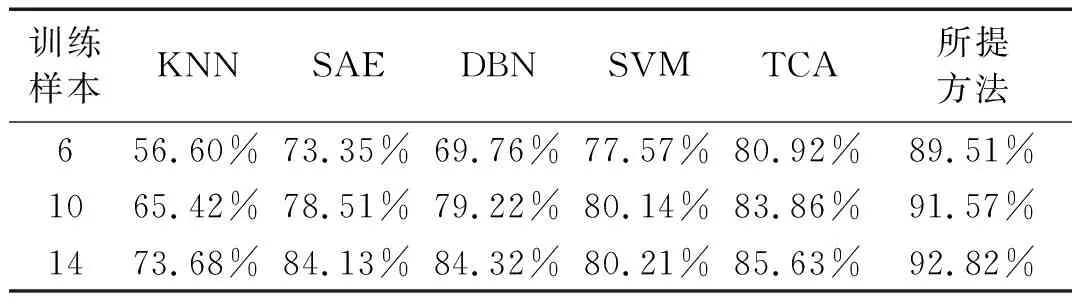
表11 样本有限下的平均识别准确率对比
为进一步证明所提方法在目标工况样本有限下能对行星齿轮箱进行高效的故障诊断。以下将对所提方法进行交叉验证实验。表5、表12和表13分别为实验1、实验2、实验3的结果,总结得表14。表14为交叉实验不同少量目标训练样本下的平均识别率对比效果。由表14可知,本文所提方法对目标样本有限下的行星齿轮箱故障识别准确率能达到90%左右。
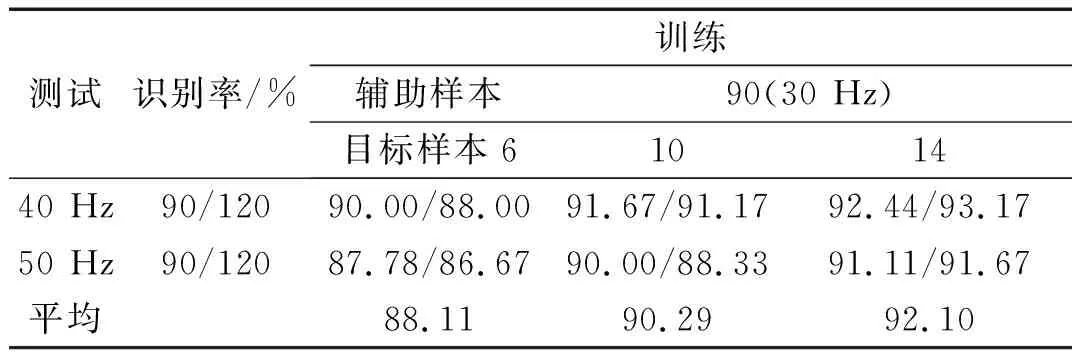
表12 所提方法故障识别准确率(2)
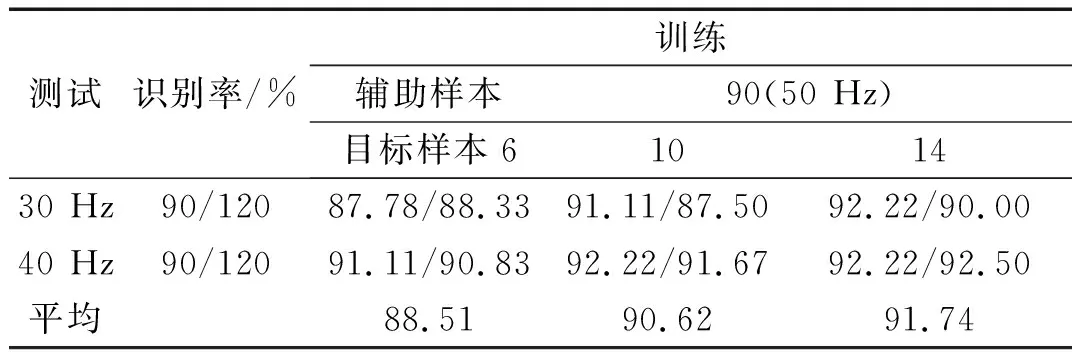
表13 所提方法故障识别准确率(3)
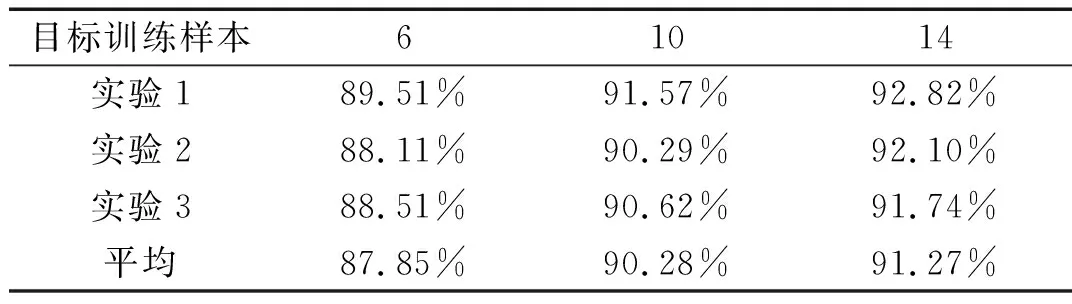
表14 交叉实验下的平均识别准确率对比
4 结 论
针对实际工程中行星齿轮箱获取的数据难以满足训练和测试数据独立同分布且训练数据充足的条件所导致诊断效果不佳的问题,提出基于DBN迁移学习的行星齿轮箱故障诊断方法,该方法利用辅助样本训练更新DBN的权重和偏置值以获得DBN预模型。再用少量的目标标记样本训练微调DBN预模型的网络权重和偏置值,实现DBN网络权重和偏置值从源域到目标域的迁移以适应新的目标样本识别,通过行星齿轮箱故障模拟实验验证,最终达到提高目标样本故障分类准确率的效果。
同时,在DBN迁移学习的训练过程中,需要多次实验才能获得较好的超参数(网络层数、神经元个数等),在后续研究中,我们将研究面向行星齿轮箱故障诊断的网络超参数设置策略。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
山东冶金(2022年3期)2022-07-19
中国信息化(2022年5期)2022-06-13
一重技术(2021年5期)2022-01-18
制造技术与机床(2017年4期)2017-06-22
北京航空航天大学学报(2016年6期)2016-11-16
风能(2016年12期)2016-02-25
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
振动、测试与诊断(2014年5期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01