基于无人机平台的测流系统探讨
2021-01-16 03:14谈晓珊
水资源开发与管理 2020年12期
高 军 谈晓珊
(1.水利部南京水利水文自动化研究所,江苏 南京 210012;2.水利部水文水资源监控工程技术研究中心,江苏 南京 210012)
水文测报是水旱灾害防治的重要支撑,在历年防汛抗旱减灾的指挥决策、科学调度,有效处置险情、灾情中发挥了关键作用[1]。特别是21世纪以来,各种新技术在水文仪器、设备及装置方面的应用,使测、报、整、算、资料存贮检索等各项水文业务,进入了一个完全崭新的历史阶段。如水文巡测、水情遥测、水资源监控、优化配置及调度、公网和卫星通信及遥感、天空地立体监测、计算机信息处理、存贮、检索,以及无人机、云平台、物联网、大数据业务应用等,极大地改变了水文测报技术的水平,同时也赋予了水文事业新的历史使命[2]。
随着现代科技发展,近年来河流流量测验方法呈现出多样化趋势,技术不断推陈出新,传统的测流手段和设备已不能满足信息化发展的需求,特别是对于防汛应急抢险流量的测验[3-5]。当河流处于洪水期间时,传统测流设备如缆道铅鱼,无法下水作业。当河流流速大于2m/s时,走航式ADCP遥控船也无法安全地进行流量测验[6]。无人机因其机动灵活的起降方式、低空循迹的自主飞行方式、快速响应的多数据获取能力,可以完成河道走向、水情监测、水库监测、洪灾区域检查等工作[7-8]。同时,在水利管理上也具有广大的应用前景,包括水域规划、水利监测与水利管理。基于无人机平台的测流系统应运而生,克服了传统流量测验存在的缺点,可随时待命应对突发状况,特别适用于防汛应急抢险测流。
1 无人机测流系统结构与功能
1.1 系统结构
无人机测流是水文测验的一种新型流量测验方式,系统包括空中设备和地面设备,主要由旋翼无人机、增稳云台、雷达流速仪、电台通信系统、地面控制系统、供电系统和移动终端组成。其中,空中设备包括无人机、增稳平台、雷达流速仪;地面设备则由无线接收终端、移动终端构成,见图1。该系统适用于流态稳定的河流中应急及巡测流量监测。
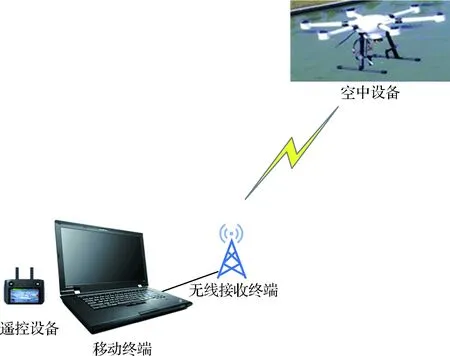
图1 无人机测流系统结构示意图
基于无人机测流系统各部分的工作原理如下:
a.无人机:用于挂载雷达流速仪、无线摄像头等设备。
b.增稳云台:可以调整雷达流速仪的姿态,使其符合雷达流速仪的安装要求。当无人机悬停测流时,云台能保持雷达流速仪的垂直角、横滚角恒定,最大程度地减少用无人机自身振动以及风、雨等的因素导致的无人机晃动,保证测流精度。无线雷达流速仪通过流速仪云台挂载于无人机上。
c.雷达流速仪:利用多普勒效应,测量水体表面的流速。当无人机悬停测流时,雷达流速仪采集水流流速数据,并通过内置的无线短传模块将数据传输至地面无线接收终端。
d.电台通信系统:用于传输无人机控制指令和相关挂载设备的信息。
e.地面控制系统:用于发送指令和接收无人机等装置的相关数据。
f.移动终端:地面移动终端为个人笔记本电脑或带有USB接口的Windows平板,装载测流软件。
系统数据传输结构见图2。
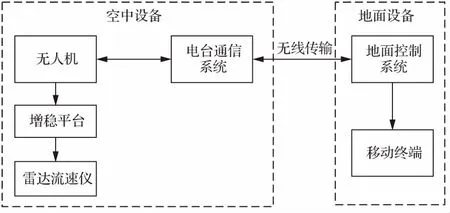
图2 系统数据传输结构
1.2 系统功能
无人机平台的测流系统能够将无线测流系统的核心功能发挥得淋漓尽致,能快速便捷测量出中小河流、大江大河等水文测验对象的流速数据。还可以回传经过区域的图像信息,保证水利行业设备与新兴先进产物牢牢结合。该系统可实现以下功能:ⓐ可同时传输搭载在无人机上的图像与流速仪传感器数据;ⓑ河道断面图显示;ⓒ根据断面数据进行飞行航线自动规划;ⓓ测流雷达回传数据解析、显示;ⓔ输入水位高度,可自动计算断面面积、断面流量、水面宽、平均流速、平均水深、最大流速、最大水深;ⓕ配套测流软件自动生成符合《水文资料整编规范》(SL 247—2012)的测深、测速记载及流量计算表[9];ⓖ在测流过程中实时模拟飞行示意图和航测点实时测速数据;ⓗ无人机飞行状态监测、低压告警、自动返航、自身故障报警等。
2 无人机测流工作原理及流程
2.1 工作原理
基于无人机平台的测流系统其实质是使用了流速面积法,前提条件是通过图纸或实地勘察选取监测河流的均匀断面。其基本原理是通过横断面上单元面积的流量是该面积与水流速度(流速)的乘积,分别测量各个部分的流速和面积即可求得流量。雷达流速仪采用多普勒效应原理测量水体表面流速。雷达测流仪将24GHz的射频信号沿轴向前方发射出去,信号遇到前方物体后发生漫反射,沿轴向返回的信号被接收到。由于物体的运动,接收到的信号频率发生多普勒频移,频移量的大小与物体的速度成正比。通过解算多普勒频率,就能够得到物体移动的速度。
将流速仪的轴线和水流方向置于同一个铅垂面内,见图3,流速仪所测量的径向多普勒速度为

图3 雷达测流仪测量原理示意图
v=vmcosα
(1)
式中:vm为雷达测流仪测量得到的多普勒速度,m/s;v为实际水流速度,m/s;α为雷达测流仪轴向方向与水流方向之间的夹角,(°)。
当雷达测流仪轴向方向与水流方向不在同一个铅垂面内时,水流速为
v=vm+vm/cosβ
(2)
式中:β为是雷达测流仪轴向方向与水流方向在水平面内的夹角,(°)。
雷达测流仪能够自动测量俯角,并对测量的速度进行余弦校正。在测量的时候,应尽量使β=0,即雷达测流仪前进方向与水流方向一致。当β≠0时,应对β进行实地测量, 并按式(2)进行校正。
2.2 工作流程
无人机测流系统利用无人机搭载雷达测流模块对河道流速进行监测,当无人机飞到河流断面指定位置后悬停,对水面流速进行测量,并将雷达流速仪监测到的河流流速数据直接通过地面软件回传。测量流量时,将测流断面分成若干个子断面,系统调取后台河道断面起点距和高程数据,自动进行飞行航线规划,起飞测量每个子断面内垂线上一点的河流表面流速,并根据当前水位计算得到子断面的平均流速和流量,再将各个子断面的流量叠加,就得到整个断面的流量。系统可同时计算得出河道的水面宽度、平均流速、平均水深、最大流速、最大水深等水文数据。
测流垂线按照《河流流量测验规范》(GB 50179—2015)要求进行布设[10]。如图4所示,虚线为测流断面设置的垂线,共n条垂线,将测流断面分为n+1个小断面。每条垂线上的垂线平均流速vi垂为无人机在该测点雷达流速仪所测的表面流速vi表与水面流速系数k两者的乘积,即:
vi垂=vi表k
(3)

图4 测流断面示意图
式中:i为对应的测速垂线或测深垂线序号,i=1,2,…,n。
N+1个断面各自小断面流量计算法则如下:
Q1=v1表k1P1S1
(4)
(5)
Qn+1=vn表knP2Sn+1
(6)
Q总=Q1+Q2+Q3+…Qn+1
(7)
式中:i取值范围为2~10;Si为相应小断面面积,m2;P1和P2为岸边系数。岸边系数按照《河流流量测验规范》(GB 50179—2015)内表B.7.1取值[10],见表1。

表1 岸边系数
3 测流软件数据对比
无人机测流系统地面移动终端配套测流软件与空中的无线雷达流速仪形成配套一对一使用。测流软件主界面会显示测试站点、测试人员、天气、测量参数及测流断面,见图5。对站点、测试人员及天气信息进行编辑后,软件可实现的主要功能如下:ⓐ测站基本参数配置;ⓑ实测断面信息配置;ⓒ测流垂线与测流参数配置;ⓓ自动测流,无人机沿航线飞行,自动悬停测流:根据设置的断面信息、垂线信息、测流参数信息,自动完成测流的过程,在测流过程中实时模拟飞行示意图和航测点实时测速数据; ⓔ数据计算与导出,测流软件可计算并导出流量计算表,可生成测点-流速关系线;ⓕ日志管理:记录用户登录、系统操作、程序更新等信息管理;ⓖ系统权限管理。

图5 测流软件主界面
经过现场多次实验,将无人机测流与缆道流速仪测验结果进行比测,结果见表2、表3,比测结果相对误差都没有超过13%,无人机测流基本能满足应急抢险环境下的测流精度要求。
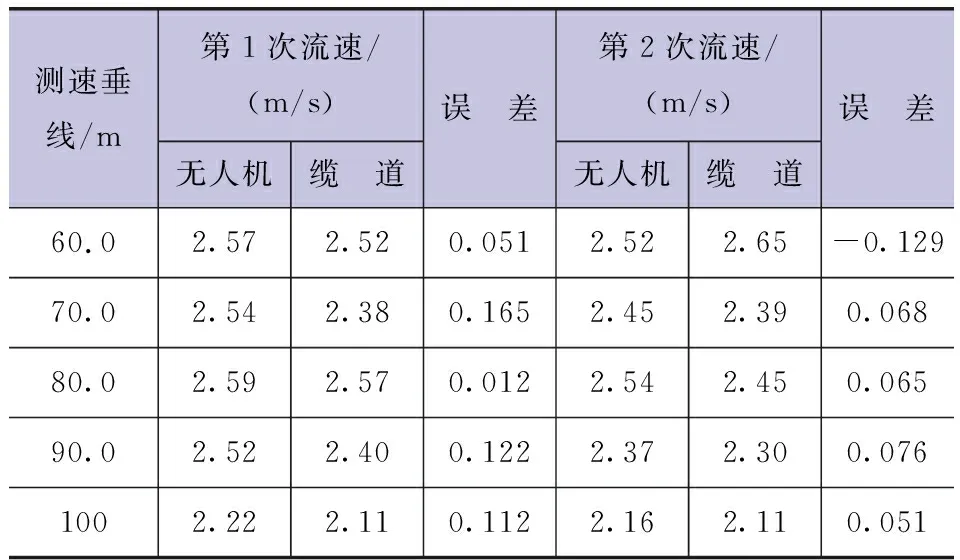
表2 无人机水面流速测验与缆道流速仪测验结果对比

表3 无人机定点悬停位置与实际水平距离对比
4 结 语
无人机平台的测流系统主要用于没有测流设备的河道洪水应急监测,可在最短时间内测得流量数据,并及时上报给上级防汛部门,能够大大减轻洪水灾害造成的损失,为相关部门的应急决策提供科学、有力的技术支撑。智能社会的发展促使我们积极探索新技术与水文业务的深度融合,研究大数据、云计算、人工智能、无人机、移动互联等现代信息技术在水文数据处理和信息服务中的应用,未来结合行业的应用需求和专业技术的开发,加快空间遥测技术在水文监测中的应用,适时地建立天地一体化、智慧化的水文监测体系。
猜你喜欢
治淮(2022年11期)2022-12-03
水资源开发与管理(2022年9期)2022-10-14
黑龙江水利科技(2022年5期)2022-07-01
中国农村水利水电(2022年2期)2022-02-23
新世纪智能(教师)(2021年2期)2021-11-05
小学生学习指导(中年级)(2021年10期)2021-11-01
考试周刊(2016年88期)2016-11-24
小雪花·成长指南(2016年8期)2016-09-21
少年科学(2014年10期)2014-11-14