
高可信度H-ADCP流量自动监测系统关键技术研究与应用
2022-02-23 05:55杨金标张后来
中国农村水利水电 2022年2期
舒 凯,杨金标,张后来,王 震,李 伟
(国网电力科学研究院/南京南瑞集团公司,南京210003)
0 引言
水平声学多普勒流速剖面仪(H-ADCP)技术已引入我国二十余年[1,2]。相较于传统流速仪法测流方式,该技术具有实时在线、测验频次高等优点[3],可显著提高水文测验工作效率。特别是在长江中下游平原河网地区和沿海感潮河段,由于河网错综复杂、河流上下游比降极小、流速缓慢[3]、感潮河段往复流以及受闸泵站等水利设施控制等因素影响,河道水位流量关系曲线无法率定。同时,传统人工流速仪法测量方式由于一次测流耗时长、测流频次低、无法实时在线监测等问题,难以满足水利部部长鄂竟平在2019年全国水利工作会议上提出的“水利工程补短板、水利行业强监管”的总体工作要求。因此,在长江中下游地区,H-ADCP 流量自动监测系统开始广泛应用,已成为水文流量测验的重要组成部分。
在H-ADCP 推广应用中,各单位结合测量河段水文特性,在站点建设选址、断面测量校核、仪器设备安装[2]、测流系统设计[4]、站点维护等方面,开展了不同的侧重研究,一定程度上保证了H-ADCP 流量自动监测系统可以实时在线监测,稳定获取高频次流量数据,为流域水资源环境监管提供重要支撑。
但与此同时,由于H-ADCP 流量自动监测系统仅上报流量成果数据,在H-ADCP 自动测流精度方面,存在许多干扰因素影响,如河道测流环境影响声束正常收发、指标流速代表性不足、比测率定不便等问题,因此在测流精度及测流成果可信度方面仍有待提高。
本文对H-ADCP 测流原理及影响测流精度的几个关键因素进行分析,提出了一种基于国产测控平台的高可信度H-AD⁃CP流量自动监测和分析处理系统设计方案,为提高H-ADCP测流可信度做了有效探索,增加了H-ADCP 的使用价值和推广意义。
1 测流关键因素分析
1.1 H-ADCP测流原理
H-ADCP 测流技术主要原理是利用声波换能器做传感器,向水中发射固定频率的脉冲波,通过水体中不均匀分布的各类悬移颗粒反射,由换能器接收回波信号,经测定多普勒频移而测算颗粒的移动速度,当颗粒物小至一定程度后,可假定其移动速度等同于水流速度,因此即可测得波束探测范围内的水流速度[5],以此作为指标流速,利用指标流速和断面平均流速的关系式(需比测率定)推算得到测流断面平均流速,再乘以断面面积,即可得到断面流量。
H-ADCP测流安装方式见图1。

图1 H-ADCP测流示意图Fig.1 Diagram of flow measuring by H-ADCP
1.2 关键因素分析
根据H-ADCP 测流原理及在各地多年运行经验总结,影响其测流工作及精度的关键因素主要有以下几方面:
1.2.1 单元流速异常
根据H-ADCP 测流原理,脉冲波的发射及回波信号接收是测定单元流速的基本方法。受外力破坏或支架形变影响,仪器设备安装角度发生偏移,导致波束偏离设定方向,对单元流速测量造成影响,严重时导致波束射向河底或水面以上,流速完全失真。
另一方面,受河道行船、水草、垃圾、漂浮物以及河道淤积等各种环境因素影响,回波强度受到干扰,导致单元流速异常,进而影响测流精度。
当测流断面存在漩涡时,相邻测流单元的流速大小和方向会发生骤变,这也会影响测流精度。
在常规测流系统中,仅反馈断面平均流速和断面流量,一般不对波束方向和回波强度进行分析,无法判断某次测流是否受到干扰,因此其测流精度和可信度无法得到保障。
1.2.2 指标流速代表性不足
受河流水位涨落影响,沿海地区尤以感潮河段涨落最为频繁,不同水位时,河道层流速分部有所区别,一般为河道剖面中上层流速较大,河底及两岸流速较小[6]。若H-ADCP 固定安装在某一高程,则在高水位时,仅能代表相对底层流速,低水位时又仅能代表相对上层流速,指标流速代表性不足[7]。因此,水位落差较大的测站直接以固定安装式H-ADCP 进行测流时,初期的人工比测率定工作较为繁重[8],往往需不同水位测量多组数据,且比对结果差异较大,定线困难,难以满足三项检验。
1.2.3 比测率定回归分析工作困难
如前文所述,H-ADCP 自动测流系统测得指标流速后,需根据关系式转换为断面平均流速。其中人工测流和自动测流的关系式需要进行率定,拟合出最佳关系曲线,并进行三项检验,常用关系线有一元线性、二元线性、二元多次、幂函数等类型。在部分重要断面,需要针对具体情况专题研究算法模型,用以率定满足精度要求的关系曲线[9,10]。
一般流量比测率定工作模式为:从自动测流系统中手工导出自动测流数据,再和人工比测流量数据一起,以固定格式导入到专用定线工具软件,进行相关率定分析计算,得到定线结果,然后再将率定公式手工写入到自动测流系统中。
本文在自动测流系统中,集成率定功能,无需将自动测流数据导出,仅需将人工比测数据导入,即可在系统中完成定线工作,率定公式也无需手工写入,可直接更新至系统,并可查阅历史率定公式。
这种一体式设计,可以减少比测率定人工工作量,让率定成果更加及时地用于自动测验。
2 高可信度测流系统设计
针对上述测流关键因素分析,本文提出了一种基于国产测控平台的高可信度H-ADCP 流量自动监测和分析处理系统设计方案,以提高测流精度和流量成果可信度。
2.1 系统结构
基于国产测控平台的高可信度H-ADCP 流量自动监测系统结构见图2。
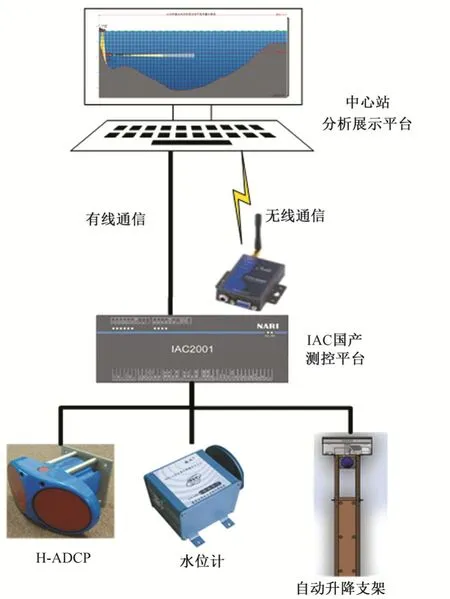
图2 测流系统结构Fig.2 Structure of flow measuring system
该系统主要设备由IAC 国产测控平台、H-ADCP、浮子水位计、自动升降支架以及中心站计算机构成。
其中,IAC国产测控平台是测站端核心控制设备,可控制多个传感器和伺服电机协同开展实时监测,并将相关测验数据计算并上报中心站,同时具备报送测流原始数据(PD0)的功能。
一般H-ADCP 自带压力传感器,可测量水深,但据经验,其测量精度不足,因此需用浮子水位计测量实时水位。
自动升降支架用于安装H-ADCP 设备,主要由伺服电机、导轨和坦克链馈线组成,可实时控制和调整H-ADCP 安装高程,使其基本维持0.6相对水深位置,提高指标流速代表性。
H-ADCP 负责流速测验,并将指标流速以及测流原始数据(PD0)反馈给测控平台。
中心站分析展示平台具备数据接收和处理、数据展示、告警提示、比测率定等功能,同时可进行测流参数的远程读取和设置。
2.2 测流流程
本系统测流流程见图3。
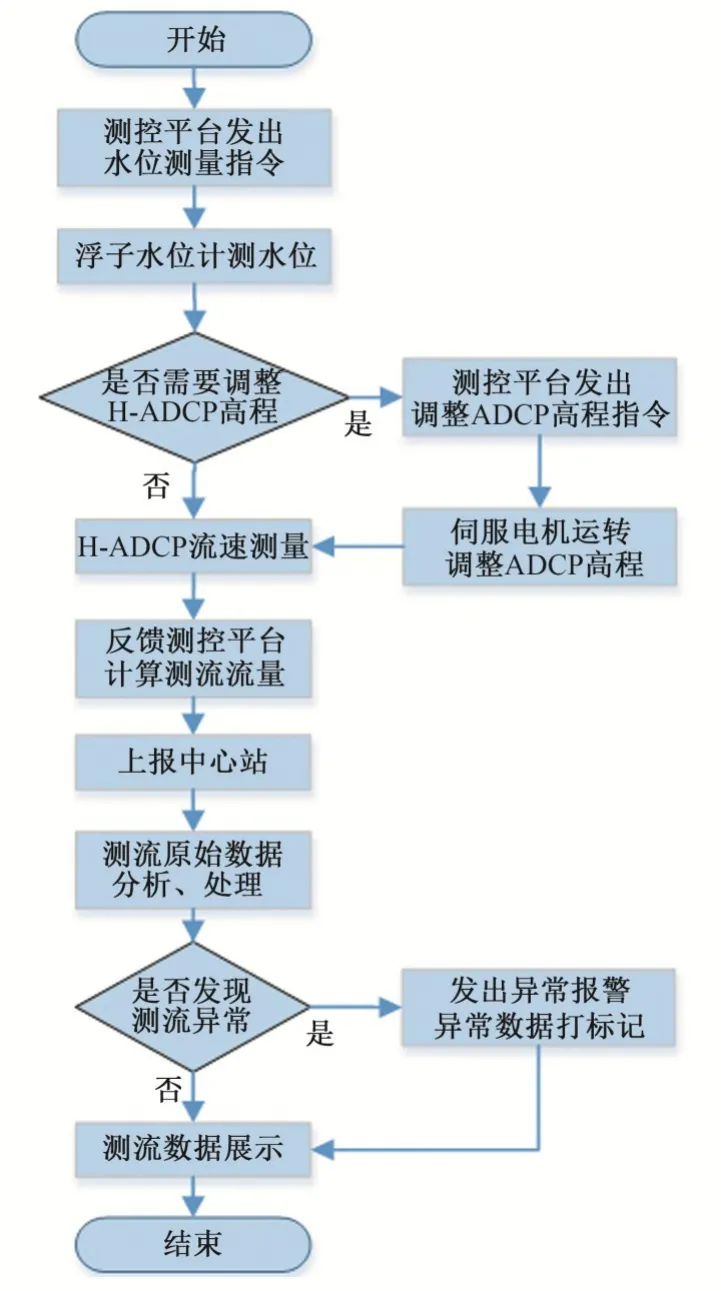
图3 测流流程Fig.3 Flow measurement steps
该系统测流指令由IAC国产测控平台发出,流程如下:
(1)利用浮子水位计测量当前水位,然后根据设置的水位级划分,判断是否需要调整H-ADCP高程。
(2)若需调整,则再向伺服电机发指令,调整高程,完毕后再进行流速测验;若无需调整,则直接开展流速测验。
(3)流速测验完成后,在测控平台计算断面流量,并和本次测验的PD0原始数据一并上报中心站。
(4)中心站在收到测流数据后,对原始数据开展分析处理,对横摇纵摆、回波强度、单元流速异常等进行判断。
(5)若数据有异常,则发出异常报警,并对当次测量数据打标记,以示异常;若数据正常,则直接展示。
3 系统关键技术
3.1 测流原始数据分析
本系统在H-ADCP 流量测验中,通过PD0 数据包的解析,读取横摇纵摆、回波强度、单元流速等测流原始数据,并通过一定的算法进行分析,判断某次测量是否存在异常。
本系统从三方面进行分析判断,对测量异常情况进行告警,对异常数据进行标记,测流过程和流量计算全程可见,提高流量数据可信度。
3.1.1 横摇纵摆异常识别与判断
横摇和纵摆是判断H-ADCP 安装角度的重要依据,当横摇和纵摆值超出某一范围时,可认定其角度发生异常。如受外力撞击或测量时有大船经过震动较大等原因均可导致角度异常。一般设置判断阈值为正负1°,超出该范围即认为角度已发生异常,需重新安装并加固测流支架。这里的正负1°,是长委下游局、太湖流域管理局等水文单位根据多使用经验得出的值,不同测站可根据安装支架样式、测流环境等进行适当调整。
3.1.2 回波强度异常识别与判断
根据ADCP 测流基本原理,回波强度将随距离的增加而逐渐减小[3],若发生某一距离内回波强度异常加强,则极有可能碰到了可以阻挡波束的障碍物,如行船、水草、固体漂浮物等。
回波强度异常识别的算法采用滑动过程分析法:首先设定每组滑动计算的回波点数n,以及回波强度差的阈值ΔS;然后从有效范围起的第n个回波点起算,与该点之前的n-1 个回波点的强度进行比较,若该点的回波强度比前n-1 个点中回波强度最小值之差大于ΔS,那么就认为该点处存在回波强度异常,也就是声束遮挡;然后滑到第n+1 个回波点,继续和该点的前n-1 个回波点比较,是否存在声束遮挡;再滑动到n+2 个点进行分析,如此滑动比较直至最后一个有效回波点。若从n开始到有效范围的最后一个回波点为止,均未发现声束遮挡,则认为本波束回波强度正常;若某次测流X向波束和Y向波束均正常,则认为本次测流回波强度正常,无声束遮挡。
这里的滑动窗口大小需要根据每个测站实际情况进行调整,主要根据本站实际运行中的回波强度过程线人工判断,把人工判断认为异常的测次列出来,然后设定不同的滑动窗口大小进行自动计算判断,看是否能够准确识别,取识别精度超过95%时的最小窗口大小进行设置。因此每个站点窗口大小不相同,一般为测流总单元格的1/10~1/20,约5~10 个单元格即可达到较好效果,满足自动判断要求。
经验证,该算法既可敏锐识别声束遮挡异常情况,又可有效过滤回波强度在合理范围内的小幅波动,避免误判。
当判断出某次测流有声束遮挡时,还可以做进一步分析,比如遮挡发生的大致方位,在ADCP 左前方3 m,或右前方20 m处发生疑似遮挡。
若某测站仅偶然发生声束遮挡,则仅需将发生声束遮挡的流量标记异常即可,后续测流可自动恢复;当连续多次测流都在同一方位发生疑似遮挡,则认为该测流断面发生长期遮挡,一般有船舶长期停靠、河底泥沙淤泥、水草遮挡或者垃圾挂住等原因,需维护人员开展现场维护作业。
太湖流域毗山闸站2019年6月起,回波强度连续异常,经系统自动分析,发现在H-ADCP 前方3 m 位置疑似发生长期遮挡。7月3日,经测站维护人员现场测量,确认在该处发生河道淤积现象,经清理后系统恢复正常。
回波强度异常分析见图4。

图4 回波强度异常分析图Fig.4 Anomaly analysis chart of echo intensity
3.1.3 单元流速异常识别与判断
一般测流河段均选取在流态相对稳定的顺直河段[6],正常情况下,同一时刻,断面中不同点的流向一般为同一流向,且相邻单元的流速变化幅度不会很大。因此,利用单元流速变幅可初步判断断面是否存在紊流甚至漩涡情况,测流数据可疑。
本系统单元流速异常识别采用相邻单元绝对值和相对值两个方面的比较结果进行综合判断,当相邻单元流速的绝对值变化幅度和相对值变化幅度均超过设定阈值时,则认为本次测流单元流速异常,测流数据可疑。
比如相邻单元流速为2 和2.5 m/s 时,绝对变幅为0.5 m/s,相对变幅为25%,认为属于正常现象;但相邻单元流速为+0.2和-0.3 m/s 时,绝对变幅也为0.5 m/s,相对变幅则超过了100%,则认为属于异常现象。
3.2 测流支架自动升降
根据《GB 50179-2015 河流流量测验规范》[11]要求,在流速测量时,测流垂线上流速测验点位置应根据水深分为一点法、二点法、三点法等不同测点数,其中,畅流期一点法相对水深位置推荐为0.6 m。而H-ADCP 测流时,一般仅测量一个水深平面,因此,为确保精度,H-ADCP 尽量也要在0.6 m 相对水深位置。
在常规H-ADCP 测流系统中,设备安装高程固定不变,在不同水位涨落情况下,其处在的相对水深位置无法保证在0.6 m附近,水位高时设备处在底层,水位低时设备处在水面附近,导致流速代表性不足,给比测率定工作带来困难,往往难以拟合出满足规范要求的关系线。
本系统根据当前水位,利用伺服电机,自动升降H-ADCP位置,使其保持在较为理想的0.6 m 深度附近,使其流速更具代表性,也更利于比测率定。
为避免伺服电机频繁运转导致的误差累积,本系统对高程进行等级划分,比如以0.5 m 为一级,当水位在0.5 m 范围内变动时,ADCP高程不做调整,超出范围,再调整至下一级。
3.3 流量比测率定分析
针对流量自动监测站点建成后,人工比测率定工作繁杂的问题,本系统开发了在线比测率定功能,与自动测流系统集成设计,可将人工比测的数据导入系统,与自动监测的数据进行对比,开展实时率定工作。主要功能有:数据表格导入导出,一元线性、二元线性、二元多次、幂函数等多种类型关系式模拟,关系线图形二、三维展示,关系线的系统偏差、随机不确定性分析,符号检验、适线检验、偏离检验等功能。本系统回归分析算法采用最小二乘法,一元线性直接以人工测流和自动测流两个流速进行计算即可,二元线性和二元多次则将测流水位加入关系式进行计算。
常规内河河段,一般采用单一率定公式即可,针对太湖流域等部分沿江、沿海的感潮河段,存在明显往复流的,还可选择类型,进行分段式率定,即:正流向、负流向、过渡等三段,设定正负流向的阈值,如0.2 m/s,正流向为流速大于0.2 m/s的部分,负流向为小于-0.2 m/s 的部分,两段分别率定,然后再讲正负0.2 m/s间的过渡部分直线相连。
拟合出曲线后,可对个别偏离曲线较远的点进行单独分析,若人工判断该点存在异常测流,还可将其剔除后重新拟合。
长村桥站比测率定二次多项式定线见图5。

图5 长村桥站二次项定线图Fig.5 Quadratic term alignment chart of Changcunqiao
4 展 望
本文提出的基于国产测控平台的高可信度H-ADCP 流量自动监测和分析处理系统在一定程度上提高了H-ADCP 流量自动监测的精度和可信度,较好地解决了长期困扰各应用单位的流量异常识别与分析处理问题,且已在长江下游和太湖流域有效使用,值得推广应用。
同时,我们也意识到,受限于H-ADCP 测流原理,其声束有效检测范围固定有限,无法像走航ADCP 那样对整个断面进行扫描和计算,因此,仍然存在改进的空间。
为使H-ADCP 在未来有更为广阔的应用,可在以下两方面开展进一步研究。
4.1 全断面旋转扫描
将H-ADCP 做成可旋转装置,扫描全断面,利用流量计算算法[1]计算断面流量。该方法理论上更为精确,但算法难度较大,且对ADCP 设备的量程有更高要求,在河道宽度较大情况下,很难做到全断面有效扫描。
4.2 水平多层联合扫描
利用伺服电机系统或液压系统,根据当前水位高程,以《GB 50179-2015 河流流量测验规范》为主要参考依据,一次测流过程中,分别调整H-ADCP 高程,扫描多个平面[7],利用面积包围法计算流量。该方法与传统人工流速仪方法完全一致,且其虚拟测流垂线可更加紧密(一个测流单元即可认为是一条虚拟测流垂线),在假定H-ADCP 所得单元流速准确的情况下,其流量数据较传统人工流速仪法更为准确。□
猜你喜欢
建材发展导向(2022年20期)2022-11-03
初中生学习指导·提升版(2022年4期)2022-05-11
第二课堂(小学版)(2021年4期)2021-01-18
西部交通科技(2021年9期)2021-01-11
大众科学(2020年7期)2020-10-26
环境(2019年4期)2019-04-20
小天使·六年级语数英综合(2018年1期)2018-10-08
魅力中国(2016年7期)2016-05-14
中学生数理化·七年级数学人教版(2008年10期)2008-01-21
