
一种齿轮测量仪测控系统设计与实现 ①
2021-01-15 03:27富春岩
佳木斯大学学报(自然科学版) 2021年1期
时 昊, 富春岩
(1.三明学院机电工程学院,福建 三明 365004;2.佳木斯大学 , 黑龙江 佳木斯 154007 )
0 引 言
齿轮是一种在机械传动领域应用范围广、使用率高的基础零部件。在航空航天、农用机械、运输工具、起重机械、工厂机床,甚至在常用的家电领域都有广泛的应用[1]。而齿轮的质量又在机械传动运行过程中起着决定性的作用,因此,进行综合误差测量,并快速判断齿轮的合格性,对齿轮进行自动化测量具有重要的现实意义[2]。
本项目设计的齿轮测量仪可实现小模数齿轮的测量,其测控系统可完成自动测量、数据采集处理、绘制测量曲线打印测试报告等功能。并可对数据结果进行分析处理,形成误差曲线图,显示、并可以以图表的形式输出每项结果的偏差值、所测量的齿轮精度等级等。对最终的数据报告可存取、亦可打印输出。
1 电气控制部分硬件系统
仪器电气控制部分的电气系统图如图1所示。在齿轮测量仪硬件系统中,根据用户需求,主轴(即回转轴)没有设置限位,而其它三个直线轴,在双向都加上了光电限位开关,以确保检测过程中零件在一定范围内安全运动。
2 软、硬件接口
运动控制器和A/D转换板是用来实现齿轮测量控制系统与硬件系统之间交互的接口。
2.1 固高运动控制器
固高运动控制器可根据测控软件发来的控制命令,它负责把模拟状态的驱动信号发送给相应轴的电机驱动器,相应的电机驱动器将会按接收到的模拟信号完成相对应的工作。并且,还会利用光栅产生的相应数据,保证测量工作中数据的精度和运动的平稳性。
2.2 模数转换器
模数转换器又叫ADC,或A/D转换板。在本系统中,它的功能是将由电感测头产生的,与标准量相对比后处理生成的模拟量,转换成二进制的离散量。经过模电转换后产生的数字信号通过PCI总线来读取,获取了相应的数字信号后,再进行当量转换,即可获取测头在齿轮表面位移变化的数据。这些电感位移数字信号数据和各运动轴位移的数字信号再通过测量控制软件系统进行相应处理,便得到了想要的齿轮测量偏差数据。
2.3 运动控制器
运动控制器包括通用输入/输出设备和专用输入/输出设备。操作面板上的指示灯以及功能键产生的信号数据由通用输入/输出设备负责。而专用输入/输出设备则负责传递M,R,Z,T四个运动轴的控制信号数据,可采集各轴状态数据和控制各轴的运动。在各轴运动过程中,如果在某方向限位,指示灯就会为红色,否则为绿色。

图1 电气系统图
各个轴的位移传感器叫光栅编码器,光栅编码器输入A+,A-,B+,B-四路中两个物理量之间的差值,控制器对这些差值数据进行处理,即可得到相对应轴的位置数据。编码器的零位信号分别设为C+,C-,当传感器进行运动,经过零位时,就会实时地发出脉冲信号,这个脉冲信号会由C+和C-传送到固高运动控制器当中,测控软件中相应的程序就会判断并确定各运动轴的绝对零位。几个运动轴中的直线轴,两侧的极限位置处都设置有限位开关,当运动轴移动到极限位置时,限位开关就会向控制器发出到达极限、运动停止的信号,而控制器收到相应信号立即停止工作,并发送出限位灯指示信号数据,随之,操作面板的指示灯便会闪亮。如果故障发生则指示灯闪亮,提醒用户出现故障。当故障清除后,测控系统软件部分的相应函数发出复位数据,控制器控制相应部件恢复工作。
当用户准备测量时,软件系统相应函数输出开始数据,操作面板的开始信号灯亮,用户可开始进行测试。当测量完成,软件系统相应函数返回停止数据,停止信号灯亮,指示用户此时可按下结束按钮,结束检测。
在检测停止过程中,若用户想手动操作,可点击手动操作按钮向软件发出手动操作申请。软件收到申请信号后,发出手动操作可行信号,系统允许用户手动控制测控操作,操控台上手动灯亮。
当用户发现异常情况时,可立刻按下操作面板上的紧急制动键,及时停止各运动轴电机正在进行的运动,并发出紧急停止的有效信号到控制器。而此时系统软件将会发出允许手动操作的命令,同时发送信号手动操作灯点亮,可进行手动操作。

图2 初始化函数
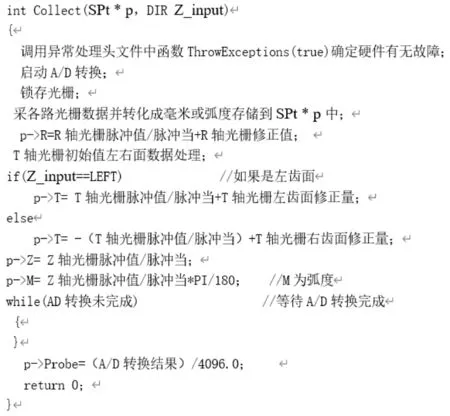
图3 数据采集函数
3 齿轮测控软件系统
在测控系统中,通过控制器采集面板上操作按键发出的各种信号、状态数据,在系统控制下向各轴运动控制器发出相应的动作命令,再通过数模转换器获取测头的位移,计算各测量项目的偏差值。测控系统还可以依据所获测头的位移数据来判断当前的电感状态,确定如何对各轴电机进行怎样的运动控制。
齿轮测量仪测控系统由底层接口模块和上层应用模块两大部分组成。底层接口模块可实现对计算机PCI总线的读写,通过动态链接库中相应的函数实现对硬件的控制以及对数据的读取。底层接口模块的功能包括控制输入输出设备、控制伺服运动轴数据、控制四轴光栅的同步、监测伺服运动轴状态,采集测头电感数据。上层应用模块则可完成仪器的测量控制功能,可实现对齿轮齿廓、螺旋线和齿距的测控。
4 底层接口详细设计
底层接口部分在整个测控系统中起到控制的作用,其中包括十余个函数:打开接口设备函数、数据采集函数、电机运动控制函数、置零函数、手/自动控制函数、电机状态测控函数、停止函数、读输入输出状态数据函数、设置输入输出状态函数、关闭接口设备函数等。
1)设备初始化函数
在上层测控系统软件需要打开接口设备时,需要调用设备初始化函数,测试并保证硬件设备处于用户所需状态。测控系统软件控制硬件正常运行,是通过插在PCI插槽中的运动控制器板卡和数模转换数据采集卡这两个板卡来实现的。在系统启动时,必须要测试这两个板卡是否能打开,如果可以正常打开,进入工作状态。初始化函数如图2所示:
2)数据采集函数
数据采集函数用于采集四路光栅和电感的相关数据信息,这些数据传送至上层测试软件,测试软件再对这些数据进行处理,其中需要设置相应变量存放光栅脉冲值、A/D值,还要采集左、右齿面数据作为输入变量。
设结构体变量SPt * p,用来存放采集的光栅脉冲值及A/D值;DIR型变量Z_input作为输入变量。
数据采集函数如图3所示:
3)运动控制函数
运动控制函数包括电机的运动控制、停止各轴电机运动控制、电机状态返回以及速度的设置、加速度的设置等。其中电机运动控制函数需要5个参数,seepd存放速度输入值,m,r,z,t分别存放每个运动轴要运动的距离。要调用异常处理头文件中相关函数,来确定相应的硬件设备是否存在故障。再根据面板中的速度值和seepd的值,控制四轴的运动,让相应的轴按要求运动到相应位置。
4)通用输入输出类函数
通用输入输出类函数包括读通用输入/输出状态函数和设置通用输入/输出状态函数。这里的读通用输入/输出状态的函数,是用来获得各输入、输出设备的初始状态的。在读通用输入/输出状态函数中,利用变量DevSt来读取输入输出设备当前的状态,然后,返回各个输出口的状态值。在设置通用输入输出状态函数中,将DevSta所对应的通用输入输出数据值设置为state值,然后返回true。
5)光栅置零函数
该函数的功能是将光栅数据初始化,利用它可建立系统绝对坐标系。当异常处理头文件中的相应函数进行判断系统硬件没有故障时,利用多分支语句实现M,R,Z,T四轴光栅的清零。
另外,还有手自动转换函数、电机状态函数和停止各运动轴运动函数。
5 结 论
齿轮测量仪测量与控制系统软件部分用VC++6.0编程实现。通过实验测试验证,该系统操作简单、界面友好,能准确、高效地进行检测,已达到用户提出的精度要求,满足用户需求。
猜你喜欢
内燃机工程(2021年6期)2021-12-10
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
测控技术(2018年2期)2018-12-09
制造技术与机床(2017年3期)2017-06-23
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
