系绳拖曳半物理试验装置设计与方案可行性验证
2021-01-14 03:15杜木雄刘明洋张世轩赵志亮
科学技术与工程 2020年35期
杜木雄,贺 云*,刘明洋,张世轩,赵志亮,4
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳 110016;2.中国科学院机器人与智能制造创新研究院,沈阳 110016;3.中国科学院大学,北京 100039;4.东北大学机械工程与自动化学院,沈阳 110006)
随着空间技术的进步,人类进入太空的活动不断增强,随之产生越来越多的空间碎片。事实上,空间碎片可以导致航天器性能下降、功能失效甚至彻底损坏。绳系拖曳(tethered space-tug,TST)系统是一种清除太空垃圾有效的方法,不仅可以将传统机器人的操作空间延伸到百米级,减少燃料消耗,还可以由于本身的绳系系统的柔性特性,有效防止末端碰撞力向平台传递,大幅度提高空间平台在任务过程中的安全性[1-2]。
半物理仿真多用于武器装备的研发和测试、机器人、航天等用途,是指仿真实验回路中接入部分实物的实时仿真,又称硬件在环或半实物仿真,是利用仿真模型替代一部分物理实物,通常由物理构件、数字模型及支持数字模型运行的仿真机软硬件设备组成,具备试验效率高,成本较低等特点[3-5]。
为模拟太空中失重环境下而进行绳系系统地面仿真试验,东京工业大学、NASA(美国航空航天局)、南京航空航天大学利用天-地动力学相似原理,搭建由喷气来实现太空中失重环境的气浮仿真平台对绳系卫星系统进行物理试验[6-9]。Schultz等[10]利用大尺度水平结构模拟Tips运行时系绳内部张力变化的示意图。Kojima等[11]利用一定倾斜角度的坡面转台微重力环境模拟绳系卫星的动力学。上述试验方法和太空试验具有较高的相似性,但是在实现轨道面外动力学仿真和难以模拟复杂空间环境上还是有很多难以解决的挑战[12]。为此,设计一种适用于绳系系统地面试验的半物理仿真实验装置,将仿真系统中易实现的系绳收放与张力控制器部分以实物的方式引入仿真回路,拖曳过程中复杂的非线性系统动力学部分以数学模型描述并转化为仿真计算模型,构建半物理仿真闭合回路,以此来验证绳系系统理论研究的可行性。
1 半物理试验装置设计
1.1 半物理试验组成原理
如图1所示,系绳收放装置(主动星)和半物理加载设备(被动星)以实物的形式引入半物理试验仿真回路中。建立主被动星空间失重环境下系绳动力学方程,以数学模型的方式引入仿真回路。拉力传感器测得的张力值由数学模型实时计算,得到不同绳长扰动动力学载荷,折算成卫星位移量及绳系变形量,由半物理加载设备中张力控制器执行绳长的收放,以此模拟被动星的状态。系绳收放装置根据指令进行系绳实时收放控制,具体功能包括系绳张力控制、系绳收回速度控制、位置保持、系绳张力测量和绳长测量。张力、绳长测量与执行策略,拖曳动力学模型通过使用NI labview软件和PXIe6341的实时解算运行。
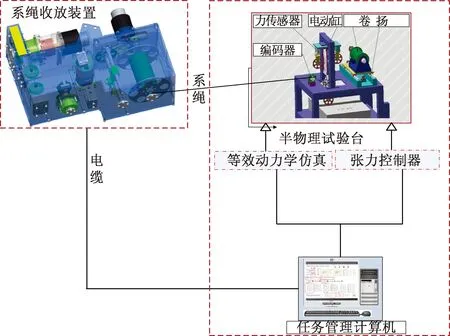
图1 系绳收放半物理加载设备工作原理Fig.1 Tether retractable semi-physical loading equipment works
1.2 拖曳动力学建模
建立图2所示的拖曳系统模型,拖曳系统主要由主动星(S)、被动星(M)和连接两者间的系绳组成。假设系统处于的轨道为圆形,建立图2所示坐标系,M、S的连接线为矢量,连接点A、B间距离矢量为lAB,AM、BS间距离矢量分别为rM与rS,可得
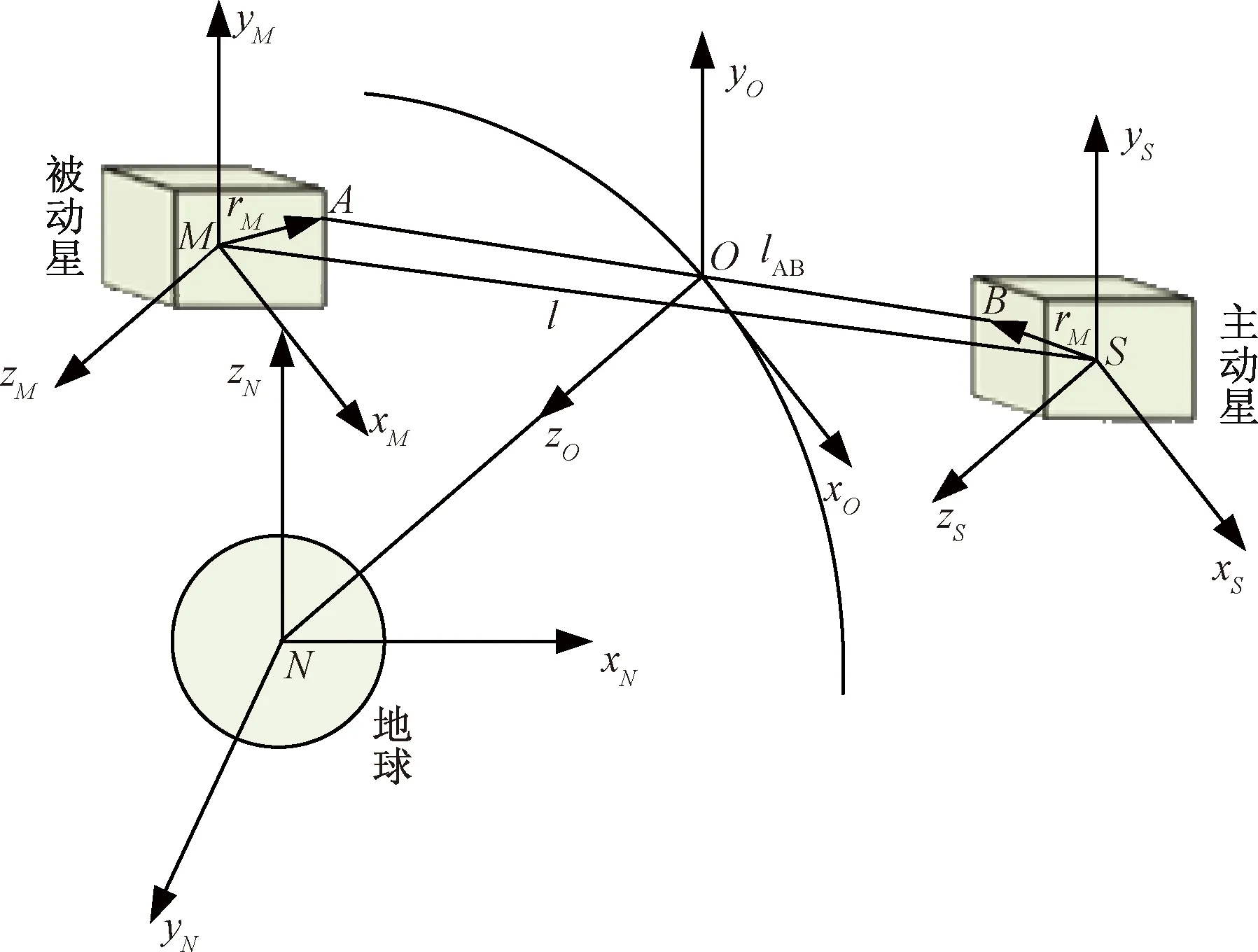
图2 拖曳系统姿态图Fig.2 Towing system attitude map
lAB=l-AOMrM+AOSrS
(1)

(2)


(4)
由牛顿-欧拉定理,主被动星的动力学方程可表示为[13]

(6)

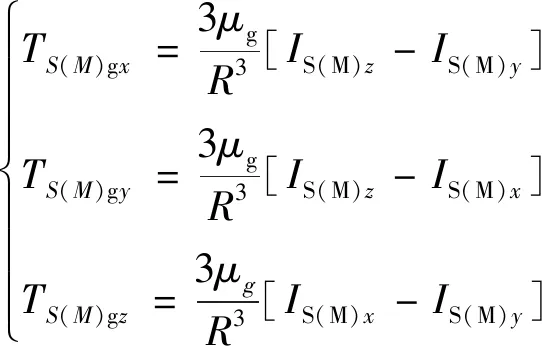
(7)
式(7)中:μg为地球引力常数;R为轨道距离地球质心的距离。
使用珠子模型对绳系卫星进行建模。设想系绳为无质量弹簧和点质量串联,把系绳离散为单位质量,其中系绳张力fi可表示为
fi=fi,i+1-fi,i-1,i=0,1,2…,n-1
(8)

(9)
式中:fi,i-1和fi,i+1分别表示作用于前端节点和后端节点的力,由开尔文-沃格定律可得;αd表示系绳的阻尼系数;ηi,i-1=EA(li,i-1-li,i-1)/li,i-1代表系绳的伸长量;EA为杨氏模量;li,i-1、li,i-1代表在节点i和i-1系绳的瞬时长度和初始长度。
1.3 半物理试验装置工作模式
试验台位置控制模式加载原理如图3所示,此时系绳收放装置处于张力控制模式,半物理加载设备工作在位置模式,将系绳测量张力作为控制器输入,通过实时解算数学模型得到拖曳过程中的各项参数,进而控制张力控制器。
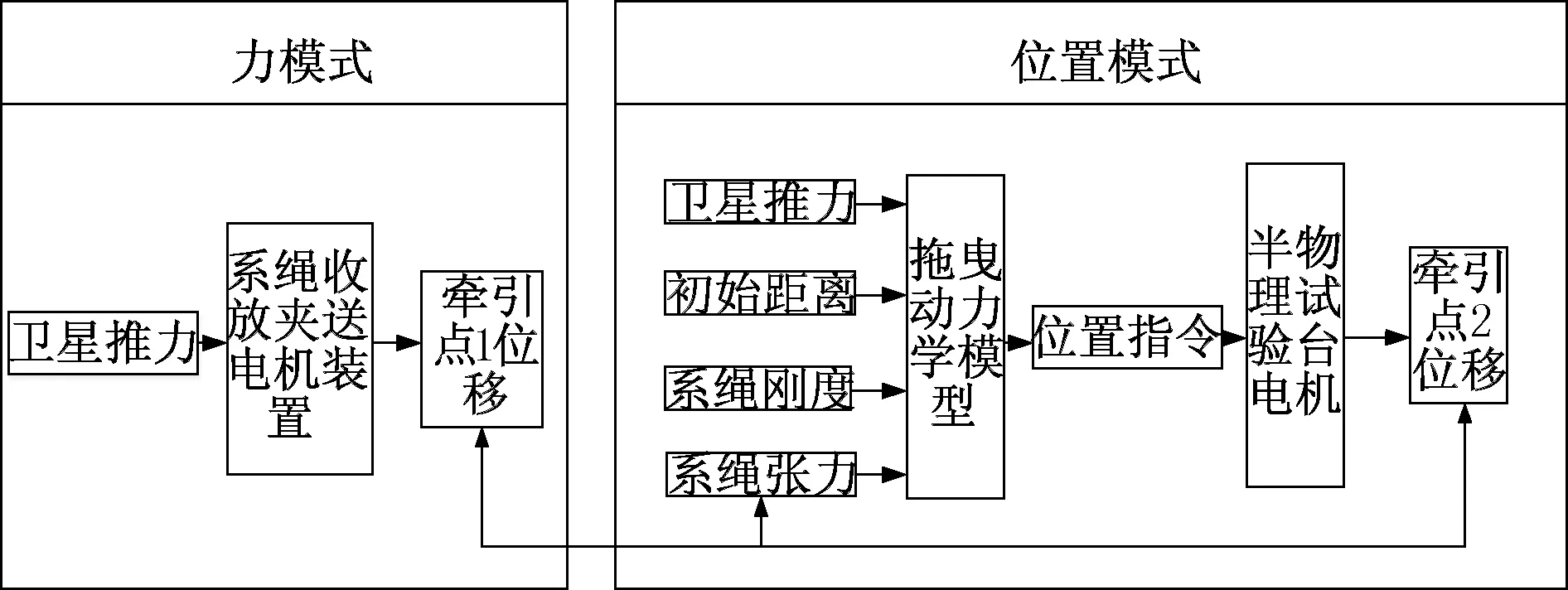
图3 试验台位置控制模式加载原理Fig.3 Test bench position control mode loading principle
2 半物理加载装置张力控制器精度验证
2.1 基于模糊PID的主从位置闭环控制器设计
2.1.1 联合控制策略
图4所示为卷扬电机和电动缸组成张力控制器的联合仿真算法流程图,建立电动缸与卷扬主从位置控制工作模式,通过卷扬电机驱动滚筒旋转实现半物理执行机构的绳长粗调节,电动缸实现精调。电动缸和卷扬联合仿真程序框图如图5所示。

图4 电动缸/卷扬联合仿真控制算法框图Fig.4 Electric cylinder / hoist joint simulation program block diagram
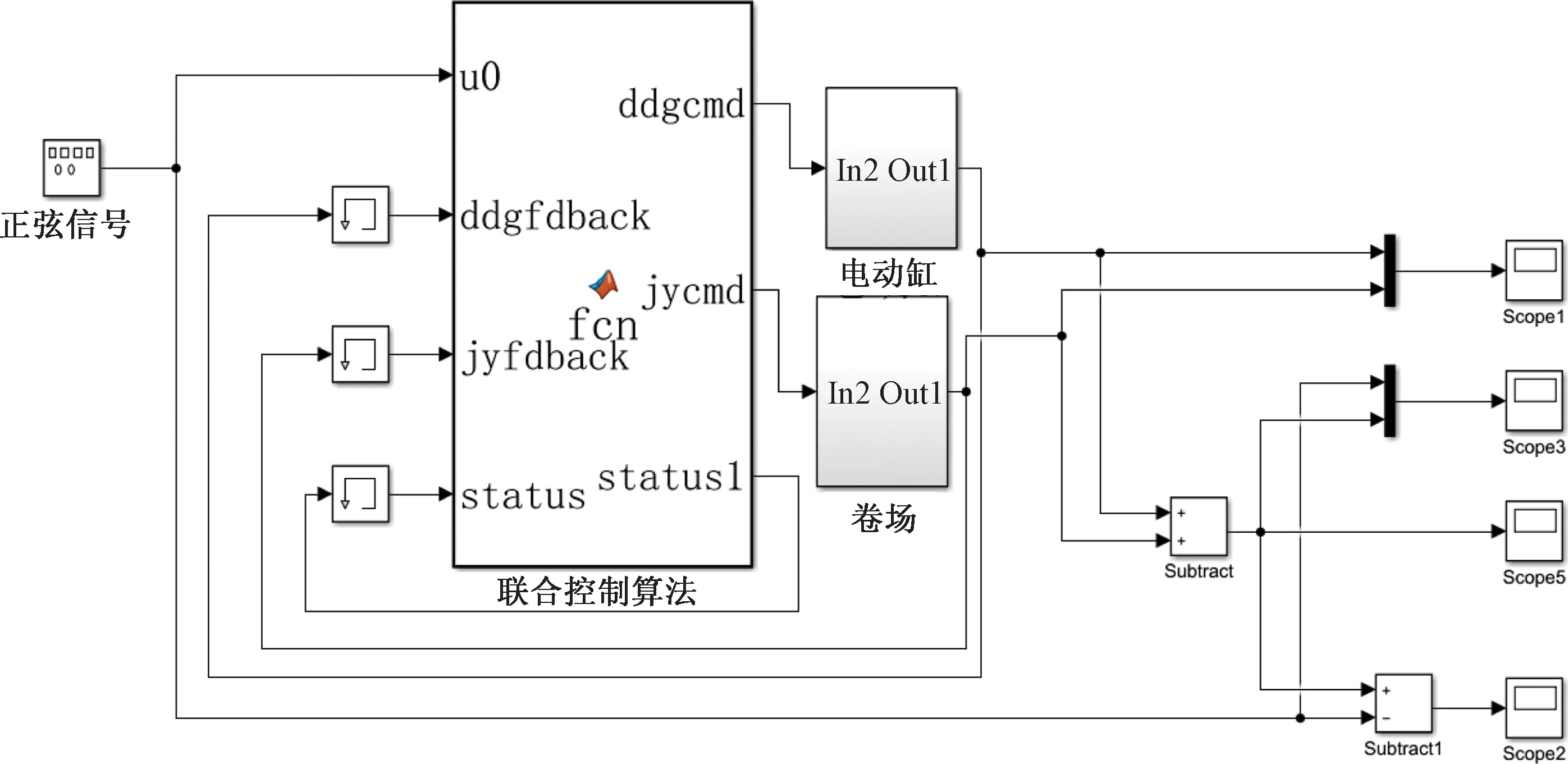
图5 电动缸/卷扬联合仿真程序框图Fig.5 Electric cylinder / hoist joint simulation program block diagram
电动缸使用模糊PID控制器进行微调,建立电动缸的控制框图如图6所示。利用编码器测量输出端的位置。建立Simulink仿真模型,分析系统频率特性响应。
2.1.2 模糊控制器设计
由于模拟拖曳过程具有非线性和不确定干扰的时变性特点,传统的PID控制参数不能有效应对模型的变化。因此设计了模糊PID控制器,通过对控制器参数Kp、Ki和Kd实时调整,实现拖曳过程的实时性和快速性,由修正后的Ki、Kd控制伺服电机的行为。其计算公式为

(10)
式(10)中:Kp0、Ki0、Kd0为据经验法整定的初始参数;ΔKp、ΔKi、ΔKd为需要修正的参数。
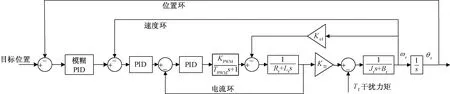
KPWM为PWM驱动环节放大系数;TPWM为PWM驱动环节延时周期;Rr为直流伺服电机电枢回路总电阻;Lr为直流伺服电机回路总电感;θr为直流伺服电机角位移;Kel为直流伺服电机反电动势系数;KT1为直流伺服电机转矩系数;Jr为等效转动惯量;Br为直流电机阻尼系数图6 电动缸模糊PID仿真程序框图Fig.6 Block diagram of fuzzy PID simulation for electric cylinder
2.1.3 输入输出量及其隶属度函数的确定
试验台以电机位置误差和误差变化率为输入,将偏差e和偏差变化率ec作为模糊PID控制系统的输入,模糊控制系统通过模糊推理方法输出参数ΔKp、ΔKi、ΔKd,构造一个双输入三输出的模糊控制器,语言变量的模糊集合为{NB,NM,NS,0,PS,PM,PB},由7个模糊值将集合划分开,分别对应负大、负中、负小、零、正小、正中、正大。将输入和输出论域统一量化为{-3,-2,-1,0,1,2,3},使用三角形隶属度函数,其分辨率和控制灵敏度较高。如图7、图8所示。
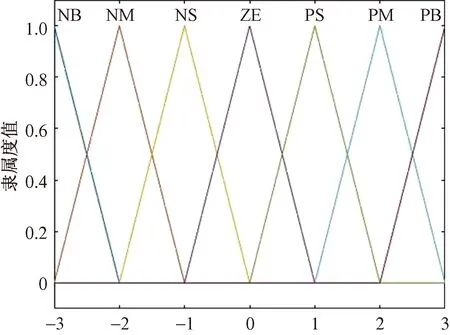
图8 ΔKp、ΔKi、ΔKd隶属度函数图Fig.8 Membership function graph of ΔKp、ΔKi、ΔKd
2.1.4 模糊控制规则的确定
比例系数Kp可加快系统响应速度,但过大会产生较大超调,降低系统稳定性;积分系数Ki可加快消除稳态误差,但过大会导致积分饱和;微分系数Kd可改善动态性能,但过大会使调节时间延长,降低系统抗干扰性。根据模糊控制规则和隶属函数,采用Mamdani推理方法,以误差和误差变化为输入,则第ij条模糊控制规则表达形式为
R:ife=μi,ec=μj,则μ=μij
(11)
式(11)中:模糊规则如表1所示。
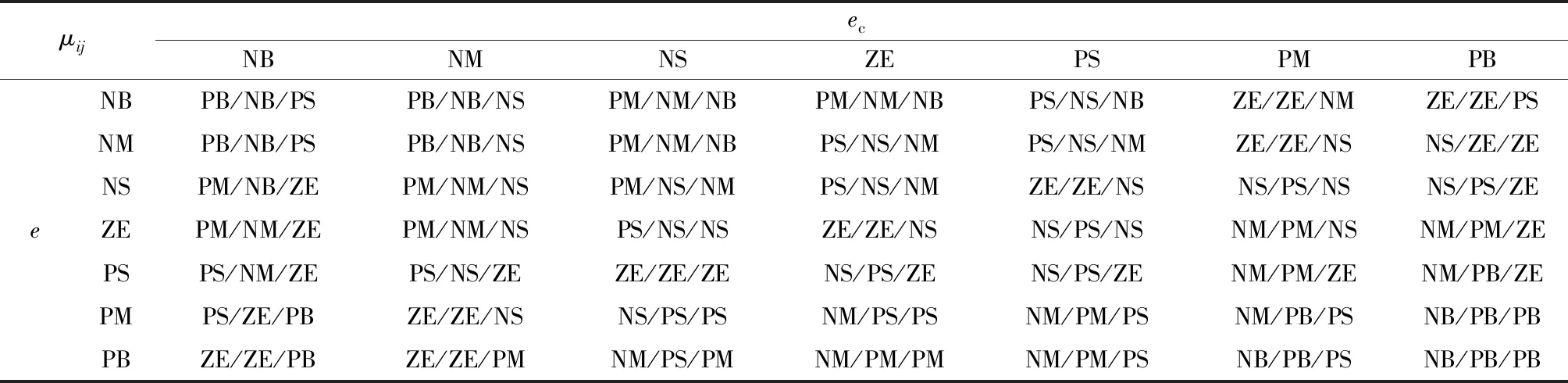
表1 模糊控制规则Table 1 Fuzzy control rule
2.2 仿真试验验证
使用10 Hz的正弦信号对基于模糊PID的闭环主从张力控制器进行位置跟踪考核,跟踪图和位置误差如图9、图10所示。
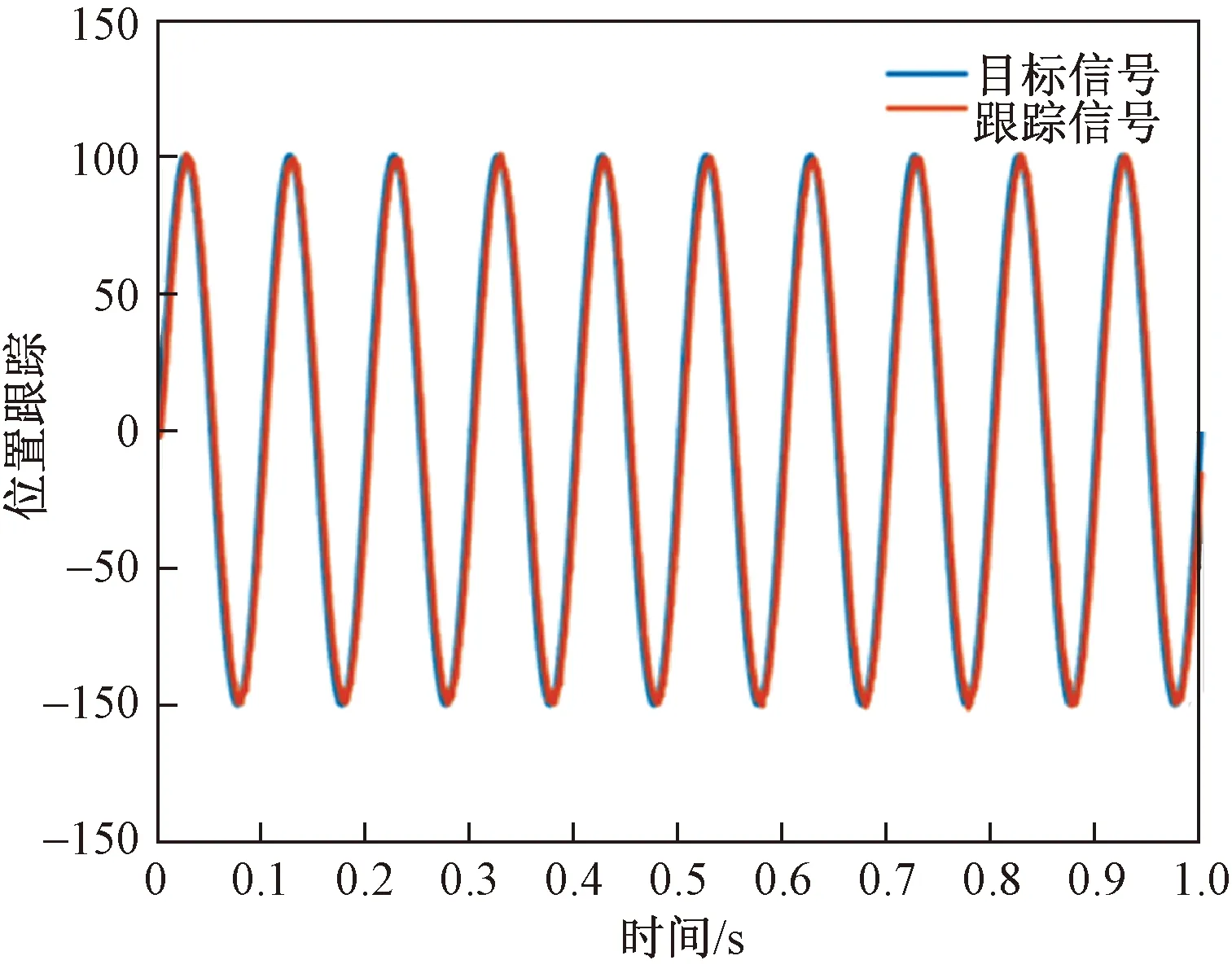
图9 10 Hz正弦信号位置跟踪考核Fig.9 10 Hz sinusoidal signal assessment
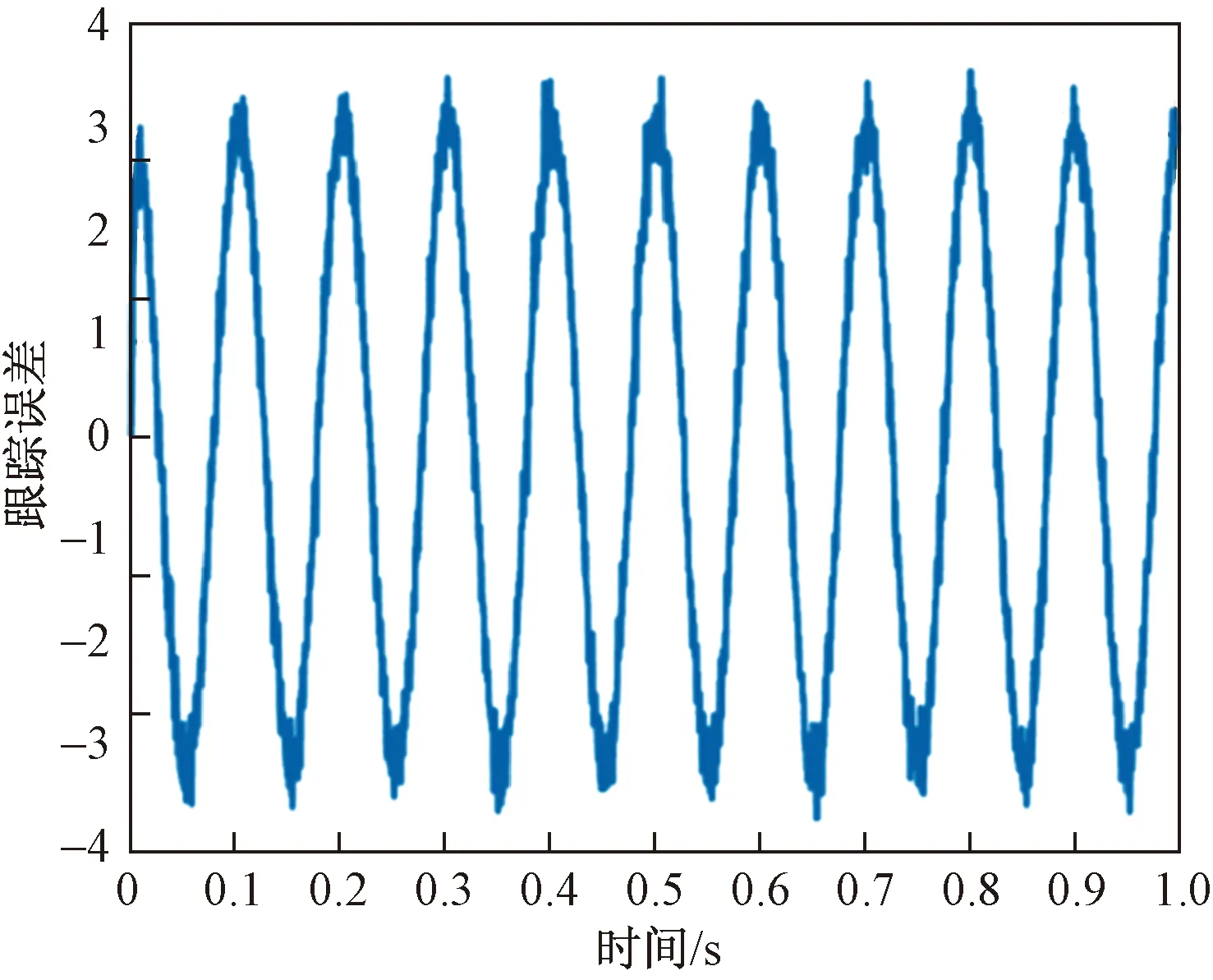
图10 10 Hz正弦信号位置误差Fig.10 10 Hz sinusoidal signal position error
从仿真结果可以看出,基于模糊PID的主从闭环控制器使得半物理加载机构具有良好的位置跟踪性能和较小的位置误差,能够满足系绳收放半物理装置对于张力控制单元的控制性能要求。
3 拖曳模型仿真与试验分析
3.1 仿真模型
根据主被动星在太空中的拖曳过程分析,建立图11所示的系绳收放半物理试验装置Simulink仿真模型,为考核半物理试验装置工作原理的正确性,初始仿真参数及仿真后系绳稳定拉力值和系绳的最大变形如表2所示。
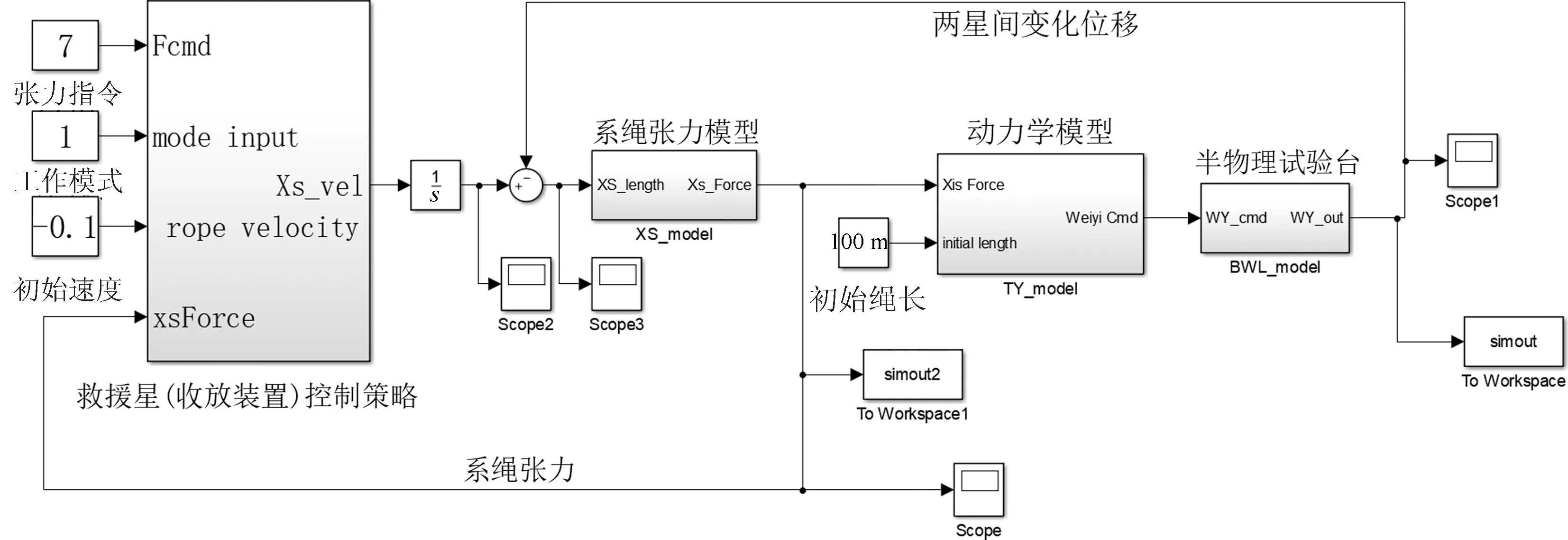
图11 试验台工作原理Simulink仿真Fig.11 Test bench working principle Simulink simulation

表2 部分仿真工况Table 2 Partial simulation conditions
3.2 仿真结果分析
仿真运行结果包括系绳拉力、系绳变形量以及主、被动星间的相对位置,如图12~图14所示。
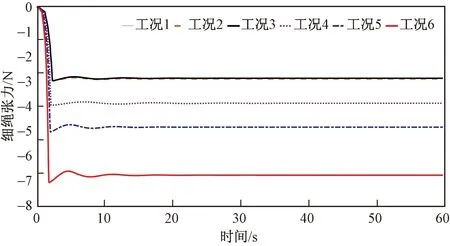
图12 系绳张力Fig.12 Tether tension
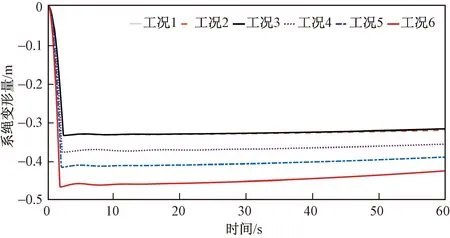
图13 系绳变形量Fig.13 Tether deformation
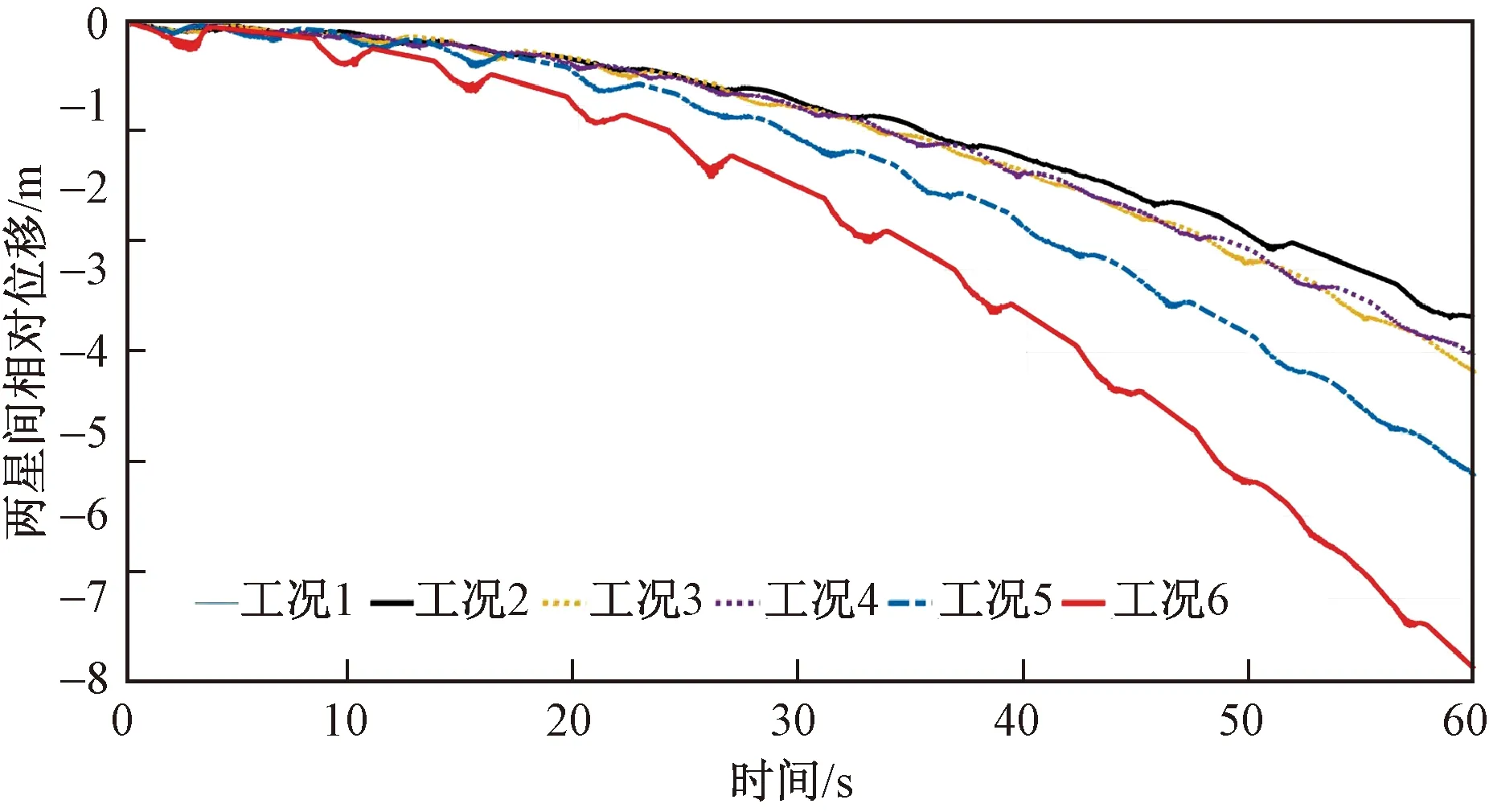
图14 主、被动星间相对位移Fig.14 Relative displacement between active and passive star
可以看出:①目标张力指令为7 N时,张力误差最大,可稳定在6.754 N,半物理加载机构张力控制器可实现系绳张力稳定;②目标指令在7 N时,系绳变形量达到最大值0.467,随着卫星之间绳长的变短,相同张力下,变形量减少;③随着目标张力指令的增加,张力误差和最大绳系变形量随之增加。
4 结论
设计了空间绳系系统的地面半物理试验装置,得到以下结论。
(1)半物理加载机构的张力控制器在基于模糊PID的主从位置控制策略下,具有较好的跟踪性能和较小的位置误差,可以满足半物理加载机构对位置指令的控制要求,可较好地模拟被动星的收放性能。
(2)对整个半物理拖拽装置建立Simulink仿真模型,验证了在不同的初始工况下,张力误差都可控制在一个较小范围内,实现张力稳定控制,从而验证半物理试验装置设计方案原理的正确性,可通过模拟不同工况下动力学模型特性,考核系绳收放装置性能。
(3)对后期开展具体地面半物理仿真实验提供了可行性支持。
猜你喜欢
中国新技术新产品(2022年15期)2022-11-08
空间碎片研究(2021年3期)2022-01-05
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2021年6期)2021-03-09
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
载人航天(2017年4期)2017-08-17
科学与财富(2016年26期)2016-12-01
电子制作(2016年1期)2016-11-07
燕山大学学报(2015年4期)2015-12-25