城市污染源实时在线监测系统研究
2021-01-14 07:30晏丹
能源与环保 2021年1期
晏 丹
(中煤科工集团重庆研究院有限公司,重庆 400037)
近年来,随着我国城市建设的快速发展,城市扬尘、烟尘等的排放使得城市大气污染防治面临严峻的考验[1]。生态环保部公布了《2019年中国生态环境状况公报》,该公报所公布的数据显示,全国53.4%的城市环境空气质量超标,以 PM2.5为首要污染物的超标天数分别占总超标天数的 45.0%,据国家环境监测中心报告,扬尘对PM2.5的贡献率大约在23%。因此,有效监测和治理扬尘污染是打赢“蓝天保卫战”的重要环节。
本文针对目前城市扬尘污染治理存在的监控点多、面广、线长,而管理人员数量少、疲于应付以及信息共享差、治理环节多、协同成本高、治理效果反复的缺点,建立了城市扬尘实时在线监测系统,实现了对大气扬尘污染源在线实时监测和有效管控,为施工方及行业监管部门提供“测得准、传得快、说得清”的数据业务,帮助行业客户实现扬尘监管与远程治理的目标。
1 系统总体方案
城市扬尘实时在线监测将远程监测与治理相结合,实现了城市扬尘监测、治理和预防,系统由城市扬尘在线监测设备、数据传输网络和在线监测平台组成。其中扬尘监测设备包括对颗粒物TSP[2]、PM10、PM2.5等粒度颗粒物的综合监测。PM10、PM2.5切割器采用呼吸性粉尘分离原理进行研究设计,首先通过切割头把大气颗粒物按要求进行切割,抽尘系统把切割后的颗粒物导入到激光散射粉尘检测装置进行测量。采用GPRS传输,把数据传输到监控系统平台,实现扬尘污染源的远程在线监管,系统可根据监测数据与超限数据对比,采取防尘、降尘措施(图1)。

图1 扬尘污染监控系统示意Fig.1 Schematic of the dust pollution monitoring system
2 扬尘监测设备
2.1 监测设备结构
扬尘监测仪由PM10/PM2.5切割器、激光粉尘检测模块、主控板、恒流抽尘系统、电源和无线通信模块组成。①PM10/PM2.5切割器。采用旋风切割方法,把总悬浮颗粒中小于10 μm或小于2.5 μm粉尘分离出来,通过测量,实现对PM10、PM2.5的综合检测。②激光检测模块。主要采用激光光散射的方法进行粉尘检测,为保证系统长期的稳定运行,检测过程中采用了清洁气隔尘的结构,避免了对检测结构的污染。③主控板。为信号处理、数据处理、算法计算的中枢系统,实现与监测系统的通信。④恒流抽尘系统。把大气中的粉尘以稳定的流量抽入到检测系统中。⑤无线模块。通过移动公网把数据传输到监控中心,扬尘监测仪可以大规模部署,每个节点均可以将采集到的数据传输到监控中心进行处理[7]。⑥电源模块。主要是通过市电供电的方式进行供电。监测设备结构如图2所示。
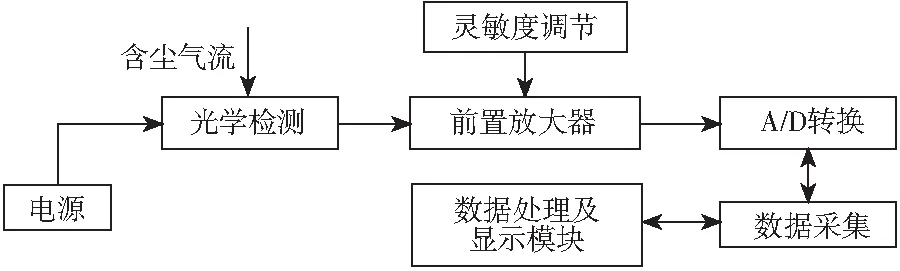
图2 监测设备结构Fig.2 Monitoring equipment structure
2.2 颗粒物检测技术
为实现城市污染在线监测系统能对颗粒物进行在线监测,采用光散射法进行颗粒物测量。光散射法作为浓度测量方法,是一种非采样测量方法,因其成本低、实时性好、可以实现在线测量的优点,已经成为颗粒物质量浓度测量的主要方法[3]。颗粒群光散射法作为以光散射原理测量颗粒物质量浓度方法的一种,满足本项目测量需求。其基本原理是:当颗粒性质一定的情况,颗粒物的散射光强度和其质量(或体积)浓度是呈正比的,在不同空间角度处,同时测量多个颗粒的散射光强信号,然后利用Mie散射理论及颗粒物的各参量可以反演得到颗粒物质量浓度。颗粒群散射法测量颗粒质量浓度流程如图3所示。

图3 颗粒群散射法测量颗粒质量浓度流程Fig.3 Process of particle mass concentration measurement by particle swarm scattering method
2.3 光学检测模块
粉尘传感器的基本构成可以分为3个重要部分,分别是光电传感部分、信号处理与计算以及流量检测与控制。光学检测模块结构如图4所示。
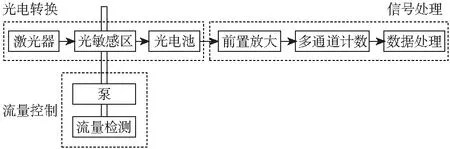
图4 光学检测模块结构Fig.4 Optical detection module structure
利用光散射法测量颗粒物质量浓度时,其中光学检测模块是粉尘颗粒物检测的核心部件。流量控制单元收到启动指令后,将测量气体通过泵抽入到光学检测室,在被测含尘气体进入到光敏感区时,根据光散射原理,粉尘颗粒会散射入射的激光,通过旋转球面反射镜收集此散射光,而此反射镜被放置在90°的采光角方向。通过放大处理,由光电探测器将散射光信号转化成电信号,便可得到与粉尘颗粒散射光强相关的电压信号,对此信号进行处理和计算[4],并结合一个周期内的粒径分布,就可以得出粉尘的质量浓度。
2.4 微电流信号放大器的研究
由于PM2.5粉尘粒径小,浓度低,受光照射时,散射光强度极弱,即使通过精密光学检测单元收集后,照射到光电转换器件上产生的电流也只有nA级[5]。本文选用锁相环放大技术[6]来提取光电传感器输出的微电流信号,可保证电路具有足够的信号带宽和负载能力、良好的线性和抗干扰能力,如图5所示。

图5 微电路放大器结构Fig.5 Microcircuit amplifier structure
具体光电信号检测过程:低噪声预放对含噪信号进行初步放大处理,然后利用滤波器和陷波器对信号进行滤噪处理和信号放大。在测量检测过程中,容易出现被测信号频率漂移、不稳定、改变等问题。为保证参考信号和测量信号频率一致,参考信号频率会随着被测信号频率改变而改变。参考信号作为一种周期信号,具有和被测信号相同的频率,这也是能实现锁相放大的必要条件。参考信号依次经过触发电路、移相电路、驱动电路,触发电路产生方波或其他规则信号,该信号具有被测信号相同的频率;最后参考信号被送入到相关信号通道进行处理。
3 数据传输
为提高远程监测的效率[8-9],本文选用GPRS进行数据传输。扬尘监测设备通过串口连接到GPRS 数据终端上,然后将数据打成 IP包,再通过GRPS 空中接口接入到GPRS 网络,最终通过各种网关和路由到达系统数据中心。
4 监控软件平台
城市扬尘污染源监管平台是面向监测人员的操作平台,相关监测人员可通过此平台查看城市污染源的实时监测数据,得到污染分析趋势,并利用远程控制防尘治理设备进行远程在线污染治理。
4.1 监管系统主体结构
监管系统主体采用 Browser /Server 3 层系统结构[10-11],分别由数据层、业务层和表现层构成[12](图6)。

图6 城市扬尘污染源监管平台架构Fig.6 Urban dust pollution source supervision platform architecture
(1)表现层。表现层为监管系统操作用户提供信息服务,可将系统获得的监管数据面向用户可视化显示,并能实现污染源基本信息数据库、建设施工单位信息数据库等数据库的接口交互[13]。系统操作用户可通过系统网址登录系统,根据权限要求查看、查询监测点污染监测信息,并可根据污染严重程度,通过远程联动的方式,对监测点现场开展喷雾降尘等治理措施。
(2)业务层。业务层可为监管系统提供功能服务[14],包括对系统门户的交互信息提供业务支持、受理和反馈。监管系统能实现网络地图、数据采集、数据管理、作业视频实时显示、污染物超限抓拍和现场录制,同时提供单个污染源的污染物动态扩散分布功能,根据用户选择可绘制单个污染源的污染物扩散分布图或者区域污染源扩散分布图,并对污染物监测数据超标报警、自动回放视频、识别抓拍违规图片,实现在线治理功能[13]。
(3)数据层。类似于“数据仓库”,提供了污染源基本信息、建设施工单位信息数据库、设备状态数据库的各种数据信息、状态信息和控制信息[15]。
4.2 监控软件功能
数据层与业务层、表现层共同搭建了城市扬尘污染源监管系统的3 层架构,建立清晰的逻辑层级关系。对应该平台,构建了污染物实时监测子系统、监管设备信息管理子系统、污染物信息管理子系统、综合报警子系统、综合业务管理子系统,各子系统可以实现不同的功能[16]。
(1)污染物实时监测子系统。获得污染源实时监测数据包括数字数据、图像数据、扬尘排放超警戒自动抓拍等数据。
(2)城市扬尘监管设备信息管理子系统。系统可实现添加、修改、配置监测设备信息及相关参数,实时查询设备的工作状态,同时可保存设备的停电、校准、报警等状态信息。
(3)监测污染物信息管理子系统。可对监测信息进行分析,提供单个污染源的污染物动态扩散分布,可实现对数据的汇总、查询、打印、保存。
(4)综合报警子系统。可对污染源监控数据超标报警,并整理数据,形成满足用户需求的污染物超标报警报表。
(5)综合业务管理子系统。实现对各级管理部门与建设单位、施工单位、监理单位等的工作联动。
5 结语
针对目前城市大气污染整理的需求及监管过程中存在的问题,将“互联网+”和大气污染监管相结合,设计完成了城市污染源实时在线监测系统,可对大气污染实时监测,并可进行污染物远程治理,及时控制污染趋势,达到扬尘监测与管控的目标。为打好城市大气污染防治攻坚战提供了技术手段,促进了环境空气质量的提升。
猜你喜欢
劳动保护(2022年1期)2022-03-09
煤气与热力(2022年2期)2022-03-09
防爆电机(2021年6期)2022-01-17
昆钢科技(2020年5期)2021-01-04
云南档案(2020年4期)2020-12-06
电子制作(2018年12期)2018-08-01
中国科技纵横(2015年6期)2015-03-27
中国科技术语(2013年2期)2013-12-27
中国科技术语(2013年2期)2013-12-27
中国科技术语(2012年2期)2012-12-28