
便携式软体康复手套的研究
2021-01-12 10:50:02黄庭威
机电工程技术 2020年11期
黄庭威,石 琛
(1.中南大学机电工程学院,长沙 410083;2.中南大学高性能复杂制造国家重点实验室,长沙 410083)
0 引言
软体机器人是当下研究的热点,如今软体机构在医疗康复设备和软体机械手上有广泛的应用。本设计属于医疗康复机械,是一款用于手部运动康复功能的软体机器人设备。很多疾病及外伤都会使病人的手部运动功能丧失,手部的受伤会给患者的日常生活带来极大的不便。医学证明,可以通过肢体训练,恢复患者的肢体损伤,防止肌肉萎缩。手部外骨骼机器人可以减轻患者的生活不便,促进患者的手部肢体功能性康复。本设计可以让患者随身携带,做到轻量化,具有很高的便携性,具有重要的意义。
目前手部康复设备已经有一定的研究,取得一些成绩,图1(a)所示为东京工业大学开发的双向运动的手部康复设备,结构复杂[1]。装置的执行器是直线式气动肌肉,每根手指有一个执行器。图1(b)所示为美国科研人员Wege A发明的线驱动的康复机械手[2],通过钢丝绳的拉伸驱动手指的伸展运动。

图1 手部康复设备
图2 所示为香港理工大学和香港中文大学合作研制的中风手指康复设备[3],结构同样复杂。通过电机控制驱动掌故关节和指骨关节的运动,可用肌电信号控制。图3 所示为德国FESTO 研制的手部康复机器人设备Exo-Hand,采用气动控制,手指背侧的外骨骼连杆体积很大,手指的灵活性受很大的影响[4]。

图2 港理工与港科的中风外骨骼机器人

图3 Exo-Hand机器人
本文针对目前手部康复设备笨重、结构复杂的特点,设计一款便携性软体康复机器人。该机器人可以根据患者手指长度调整软体手指的尺寸,通过气动驱动软体手指的方式使得患者可以完成屈伸、抓取物体等动作,完成对手部患者的康复训练。
1 总体方案设计
该款软体康复设备的设计主要包括软体手指、硬件电路、气动驱动回路、控制程序4个部分。通过嵌入式编程控制硬件电路驱动气泵和阀,实现对驱动系统的控制,驱动系统将电能转换为气体的压力能,驱动软体手指,如图4所示。
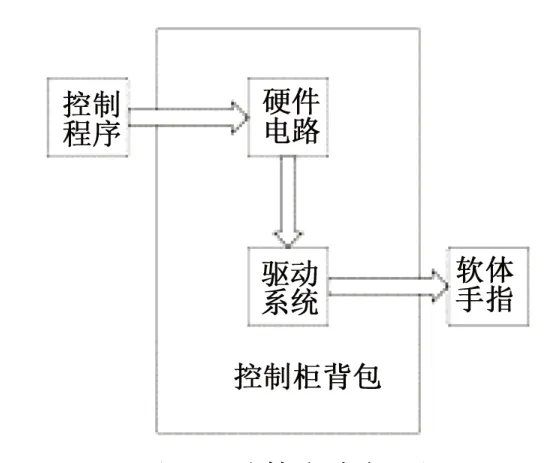
图4 总体方案框图

图5 人手关节示意图[5]
2 软体手指设计及Abaqus仿真
本文对于软体手指的设计,首先分析人手骨骼结构,查阅医学文献,得到手部手指的数据,如图5所示。根据指骨尺寸调整软体手指的尺寸,对于设计结果,通过Abaqus仿真验证其合理性。
成年后,人体手指指骨的长度都稳定在一个范围内。人体的手指骨骼又分为近指骨、中指骨、远指骨。指骨与指骨之间相连形成关节,关节之间通过肌肉进行驱动,而骨骼起到支撑的作用。表1所示为成年人手指指骨长度[5]。
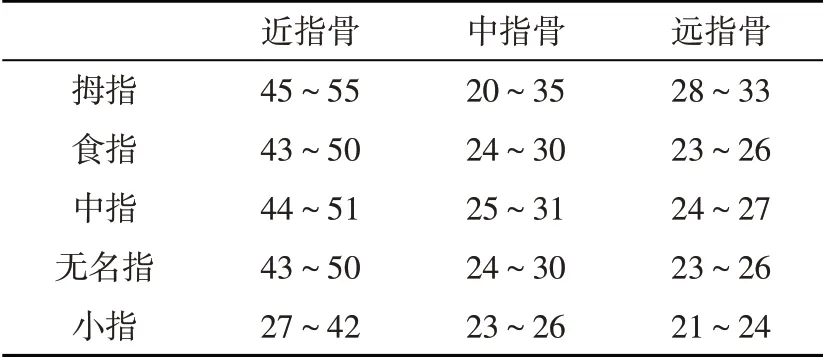
表1 成年人手指指骨长度mm
根据指骨的长度,设计软体手指关节的尺寸,使用Solidworks对软体手指进行建模。软体手指的基本结构是一个中空的腔体[6],在指骨关节设置气室,在底层黏贴限制伸长的布层,在气压驱动下,气室膨胀迫使手指弯曲。手指的制作需要通过硅胶浇注,由于气室是中空结构,无法一次浇注完成,需要分成上、下2部分分别浇注再用胶水贴合密封。软体手指结构图如图6所示。

图6 软体手指结构图
为验证软体设计的合理性,使用Abaqus软件进行变形有限元分析,如图7 所示。分析时,材料定义为Ecoflex 硅胶,使用Yeoh五参数能量密度模型。假设材料各项同性,软体手指的网格划分使用实心四面体二次杂交元(C3D10H 单元类型)建模[7]。表2所示为Yeoh能量密度模型系数[8]。

表2 Yeoh能量密度模型系数
负载为作用在软体手指内腔上及其连通孔的均布负载。图8所示为不同气压下各指骨的相对基指骨的弯曲角度。可以看出,软体手指达到预期要求。软体手指只在关节处弯曲,手指弯曲时,实现屈伸动作。0~0.14 MPa的范围内,关节弯曲角度随气压压强增大而增大。

图7 软体手指变形仿真
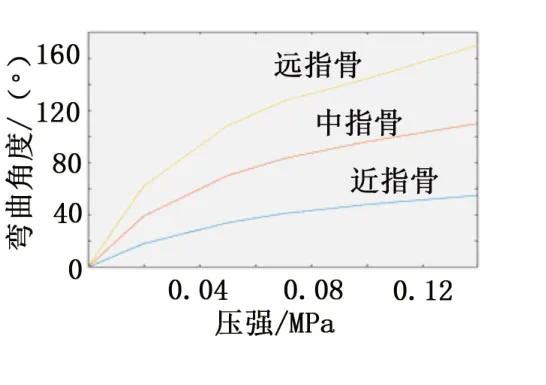
图8 不同压强下指骨的弯曲角度
3 软体手指运动空间分析
采用D-H法对软体手指进行运动学建模和分析。在手指关节连接点建立相对坐标系xijyijzij,其中,i=1,2,3,4,5分别为拇指、食指、中指、无名指和小指;j=1,2,3,4 为各手指关节点。图9所示为软体手坐标系[9]。

图9 软体手坐标系
D-H法由L、d、α、θ4个参数组成,L为杆件长度,d为x 轴方向两坐标系的长度,α为杆件转角,θ为x 轴绕y 轴旋转到z轴的角度。表3所示为D-H系数。

表3 D-H系数
建立手指关节转换矩阵,手指上的任意关节的坐标,都可以通过关节变换得到:

4 硬件电路设计
对于便携式康复手套设备的硬件电路,采用Altium Designer 软件设计原理图和绘制PCB 文件。主要阐述对MCU 的选择、气泵电机驱动电路和电磁阀电路的设计。
硬件电路的MCU选用恩智浦公司的K60控制器,型号是MK60DN512VLL10。该单片机采用Cortex-M4内核[10]。Flash内存为512 kB。MK60DN512VLL10 拥有丰富的模块,DSP、NVIC、SysTick、SCB、MPU、FPU 等。K60 控制器在电机控制、汽车电子、电源管理、嵌入式音频和工业自动化上具有广泛的应用。

图10 MK60DN512最小系统
对于气泵电机驱动的控制策略是H 桥驱动,采用N 沟道MOSFET 和专用栅极驱动芯片。栅极驱动芯片采用国产芯片FD8266,每块该类芯片可以构建3个半桥驱动,通过4个N 沟道MOSFET构建H桥[11]。如图11所示。

图11 栅极驱动芯片FD8266
电磁换向阀,本质就是一个继电器。由于单片机的拉电流和灌电流较弱,驱动能力差,在驱动继电器这种大功率器件的时候,可以使用三极管。在继电器线圈两端反向并联抑制二极管,以吸收线圈断电时产生的自感电动势[12]。如图12所示。
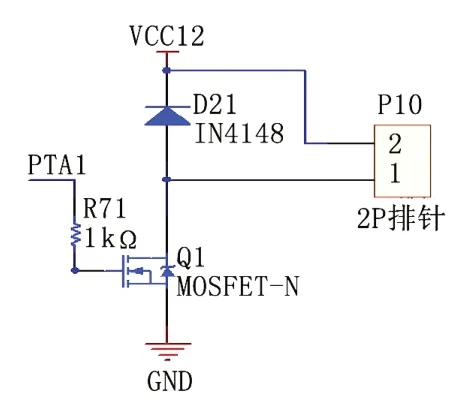
图12 继电器控制电路

图13 充气、保持、放气3种状态
5 气动驱动系统
本设计软体手指的驱动方式为气压驱动。气动驱动系统由气泵、电磁换向阀和软管组成。对气路回路,首先需要设计可以保持充气、放气和保持3种状态,通过两位两通阀与两位三通阀的组合可以实现这3种状态[13]。如图13所示。
采用直流电机驱动气泵,软体手指抓取物体时,拇指需要更大的驱动,所以拇指软体手指需要单独一个气泵驱动,而食指、中指和无名指、小指用一台电机驱动,如此,可以使资源更合理分配,减轻重量,更具便携性。如图14所示。
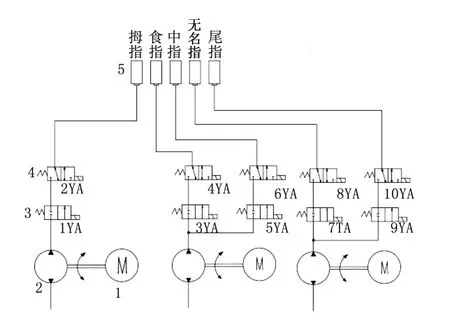
图14 气动驱动系统
6 控制策略
在控制策略上,首先从患者的手部获取表面肌电信号,整流滤波后获得系统输入量,通过PID 计算后得到控制量,单片机产生PWM 波控制电机转速从而控制驱动回路的气压。产生响应后,气压传感器和压力传感器产生响应的气压值和压力值完成反馈。按键电路和OLED显示屏的组合可以实现对系统参数的修改,以及系统状态的显示。如图15所示。

图15 系统控制框架
肌电信号是一维动作电位序列,为交流信号,有效频段在于0~500 Hz,如今市面已经集成肌电信号采集板,对肌电信号进行放大滤波馅波处理[14]。如图16所示。

图16 sEMG肌电信号
由于肌电信号是微弱的电信号,容易受到心电信号的影响和传感器本身的干扰,在硬件滤波外,还可以采用软件卡尔曼滤波,进一步降低干扰,卡尔曼滤波是通过状态量的估计值和实际值之间的均方误差的最小准则来实现的。基于这种准则,使得状态量的估计值越来越接近实际值。卡尔曼滤波的数学方程分为预测方程和更新方程[15]。
预测方程:

更新方程:

通过一个简单的验证就可以看出卡尔曼滤波的效果,假设一个质点进行匀速的直线运动,然后引入一个非常大的噪声,再用卡尔曼滤波对质点的运动状态进行滤波处理。如图17所示。通过Matlab计算可得,经过若干次迭代,滤波效果非常明显。

图17 卡尔曼滤波Matlab验证
对于系统控制,设置气压内环与压力外环,气压内环可以监控气动回路气压的最大值,防止气压过大造成软体手指破裂。由于压力外环只有在患者抓取物体接触时才产生反馈,加入气压内环可以让系统反应更灵敏、快速,能够消除扰动,系统调节更迅速,降低偏差。如图18所示。
对于系统外环,可以检测患者抓取时的合适力度,保证平稳抓取。

图18 系统控制原理图
7 设备便携性评估
目前市面上康复设备存在机构笨重、便携性低等问题,本文设计一种基于Cortex-M4 微控制器的便携式软体康复手套,设备体积小、重量轻,大大提高了便携性,非常有利于患者的手部康复。康复手套配套的控制箱,其各模块的质量如表4所示。整一套设备的整体质量可以控制在5 kg以内,可以通过肩带佩戴在背部,随身携带,具备很高的便携性。如图19所示。

表4 主要硬件模块质量
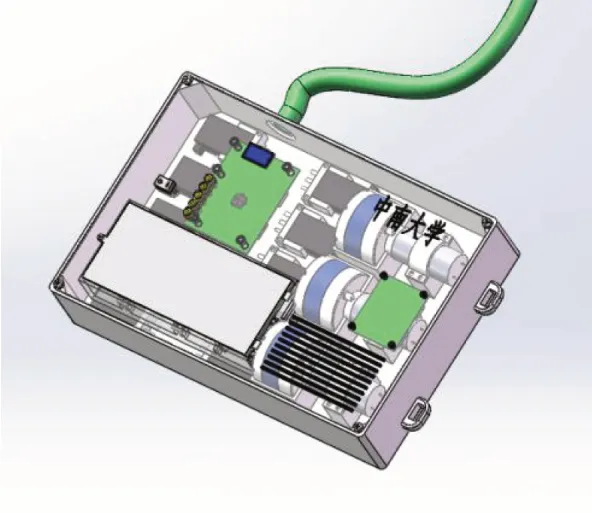
图19 设备三维图
8 结束语
目前手部软体康复手套的研究已经取得一些成绩,但其结构复杂、便携性差、价格昂贵。针对这种情况,本文设计一种基于Cortex-M4微控制器的便携式软体康复手套,设计软体手指结构并通过Abaqus有限元仿真验证合理性,设计硬件电路绘制PCBb板,设计气动驱动系统和控制系统。本设计具备便携性好、价格低等特点,具有很大的发展前景。
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
实用手外科杂志(2022年2期)2022-08-31 09:48:02
实用手外科杂志(2022年2期)2022-08-31 09:47:48
上海交通大学学报(2021年2期)2021-03-02 10:17:22
军事文摘(2020年24期)2020-11-29 06:35:54
实用手外科杂志(2015年2期)2015-08-28 09:50:40
实用手外科杂志(2015年4期)2015-08-27 01:54:14
实用手外科杂志(2015年4期)2015-08-27 01:54:08
中华皮肤科杂志(2014年4期)2014-12-19 12:56:00
中国药业(2014年21期)2014-05-26 08:56:48
