基于纯电动“爱驰汽车”的电液复合制动系统设计
2021-01-10 12:42陈叶叶
内燃机与配件 2021年24期
陈叶叶
摘要: 本项目设计适用于一种纯电动汽车的电液复合制动系统,采取并行控制策略的设计思路。分别在Carsim、MATLAB/Simulink仿真平台搭建整车模型和控制策略模型,然后建立联合仿真模型,并且在NEDC循环工况和紧急制动两种工况下分别对其进行仿真分析。
Abstract: The design of this project is suitable for an electro-hydraulic compound brake system of a pure electric vehicle, and adopts the design idea of parallel control strategy. The vehicle model and control strategy model were built on Carsim and MATLAB/Simulink simulation platforms respectively, and then a co-simulation model was established, and simulation analysis was performed on them under NEDC cycle conditions and emergency braking conditions.
关键词: 纯电动汽车;制动系统;设计思路;电液复合
Key words: pure electric vehicle;brake system;design idea;electro-hydraulic compound
中图分类号:U469.72 文献标识码:A 文章编号:1674-957X(2021)24-0215-03
1 研究意义
目前无论是汽车行业还是消费者都追求汽车能耗低,而现在的发展趋势是传统汽、柴油发动机正朝着小排量的方向发展,混合动力及纯电动汽车正朝着节油减排的方向发展,但是目前新的汽车动力总成不能够为其提供持续稳定的制动真空助力源,而且对于配有驱动电机的混合动力汽车、纯电动汽车,真空助力系统已经无法车辆在制动是对驱动电机的阻力控制以及制动时的能量回收。
为了弥补目前传统助力系统的不足,先后研究出两种不依赖于真空助力的形式的制动系统。其中一种为高压蓄能的制动方式,当车辆紧急制动时,存储在蓄能器中的高压储能媒介会被释放出来,瞬时将驾驶员所需要的制动助力能力释放出来,另外一种便是利用电机驱动机械传动装置为主缸提供减压能力。上述两种类型各存在优缺点,第一类的高压蓄能方式,对高压媒介的储存有较高的要求,存在一定的安全隐患,特别是在车辆发生交通事故时,对驾驶员、乘客造成二次伤害。第二种助力系统,系统的组成部分较多,结构较为复杂,对其稳定输出有较高的要求而且由于机械传动系统特性,踏板与主缸的解耦很难实现,对于回收制动能量存在一定的难度。
本项目设计适用于一种纯电动汽车的电液复合制动系统,采取并行控制策略的设计思路。分别在Carsim、MATLAB/Simulink仿真平台搭建整车模型和控制策略模型,然后建立联合仿真模型,并且在NEDC循环工况和紧急制动两种工况下分别对其进行仿真分析。
2 国内外同类研究工作现状
国内外多位知名学者对电液复合制动系统做了许多研究,主要研究内容包括制动系统方案设计、控制策略研究、仿真分析以及试验验证等方面。
2.1 国外研究现状 丰田公司在混动汽车Prius中建立了一套电液复合制动系统数据分析,在此系统中利用制动踏板模拟器实现解耦与液压力和踏板力,在该系统内包含ABS和安全制动模式,在该研究的系统中也存在一定的缺点:系统结构复杂、研究成本较高;博世公司开发的复合制动系统采用制动驱动单元和制动压力调节系统代替传统真空助力结构,该系统的可靠性已经通过市场的检验;GUANG等提出了一种电机减速机构为主的EHB系统,可以实现制动踏板与制动力的解耦,并进行了试验验证,但也存在一定的缺点,未将ABS考虑在内。
2.2 国内研究现状 刘曦东等人采用并行再生控制算法,该算法不仅可以有效控制液压制动力而且能够准确分配制動力,还进一步对半实物进行了仿真,但是也存在缺点,该研究所设计的比例溢流阀很难实现预定目标;李玉芳和吴炎花等人在设计过程中考虑到了制动法规、制动稳定性、电机特性及制动舒适性,并提出了理想制动力分配策略,也进行了城市循环工况仿真,但也存在缺点,忽视了动力电池因电量过高而引起的过充电保护;王权等研究者利用仿真平台AMESim搭建了一种电动汽车复合制动整车模型,并且对串联和并联再生制动力分配策略分别进行了纯制动工况的仿真,目的是研究影响制动能量回收的因素,但是也存在缺点,没有在在城市循环工况模拟其运行工况。陈晋市等研究者建立1:1的实验平台,经过实验数据的对比分析,结果验证了该套全新制动系统应用性很可靠,但是此研究仅仅局限于全电驱越野车,市面上普通电动汽车并不适用。徐国胜等研究者研究的是一款纯电动汽车的制动能量回收系统,重点研究分析了纯电动车串行制动能量回收系统,研究结果证明了当汽车处于制动、减速阶段,机械-液压制动力与电机回馈制动力能够很好的进行实时协调,回收得到最大的制动能量,而且能够切实感受到制动稳定性以及稳定的“踏板感”,但是该研究的不足之处是单个ECE循环工况在经济性方面仅仅能够贡献28.9%。吴科甲等研究人员在环仿真试验平台上搭建了电动汽车稳定性控制系统硬件,在仿真软件CarSim中搭建了车辆多体动力学模型、在仿真软件Labview中搭建了车辆动力学控制模型、数据采集系统以及ESP泵控制系统。但是该研究针对的是汽车在极限工况下电液复合制动系统的能量回收情况,没有普遍性。
虽然国内外学者的上述研究工作取得了一定的成果,但是研究过程中的技术方案、实验平台、技术参数等方面不尽相同,而且运用的研究方法和技术并未得到广泛证实和推广,因此存在一定的局限性,所以基础理论知识和先进科技技术仍然需要进一步探索和挖掘。
2016年发布的《浙江省能源发展“十三五”规划》和17年发布的《浙江省“十三五”节能减排综合工作方案》中均明确指出把节能减排作为优化经济结构、推动生态文明建设、加快“两美”浙江建设的重要抓手和突破。
综上所述,提高新能源汽车的能量回收是亟待解决的关键技术问题和热点问题,其中基于“四省通衢、五路总头”之称的衢州市新能源汽车技术的改进便成为重要研究方向。目标是实现新能源纯电动汽车制动能量回收绿色智能大发展。这一研究不仅在新能源汽车领域具有重大意义,在其他具有制动系统的上设备上能够被广泛的应用和普及。
3 研究内容
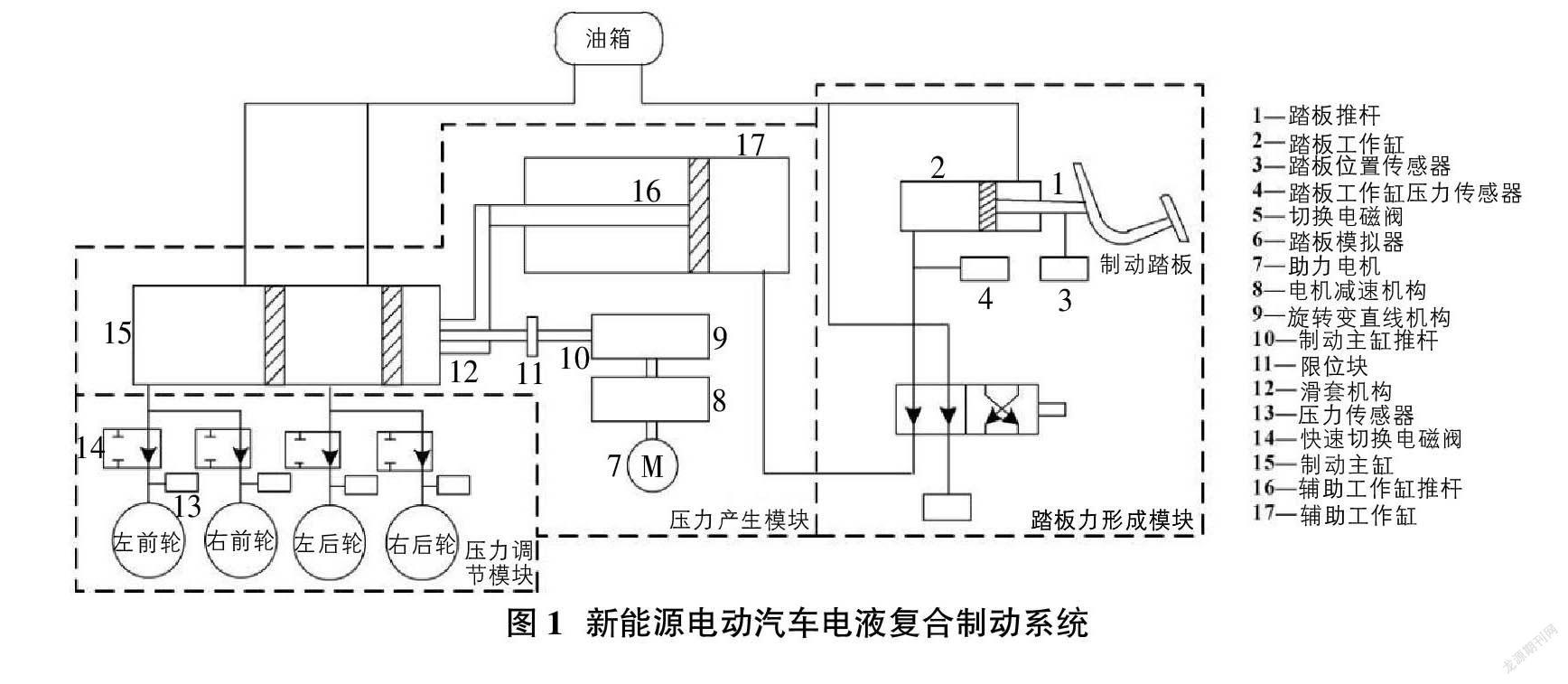
3.1 电液复合制动系统方案设计 电液复合制动系统把电机当做液压制动力来源,利用电机的转动力来助力踏板力,利用技术比较成熟的踏板力模拟器来解耦踏板力与制动力,从而实现将准确的制动反馈感觉传递给给驾驶员。制动系统主要由踏板力形成模块、压力产生模块和压力调节模块组三大部分组成。
3.2 制动力分配控制策略设计 当今最流行的电动汽车制动控制策略主要有以下三种:最佳制动效果控制策略、最优能量回收控制策略和并行制动控制策略。本项目研究者通过分析对比得出并行制动控制策略的设计与本项目研究的电液复合制动系统更匹配,只需要将再生制动力加在汽车的前轴便能实现制动力分配,方法简单且成本低,而且能够很好的保证系统的稳定性与安全性。所以本项目研究者共同决定采用并行控制策略的设计思路。
3.3 仿真模型搭建 由于设计者比较熟练运用仿真软件Carsim和MATLAB/Simulink,因此,使用以上两个软件来搭建电液复合制动系统的联合仿真模型,主要包括整车、电机、电机控制器、动力电池、变速箱、驾驶员、VCU和制动力控制策略模型。利用仿真软件Carsim搭建整车模型,同时整车模型作为试验制动性能的一个载体;在仿真软件MAT-LAB/Simulink中搭建其他与制动系统相关的模型。
3.4 联合仿真分析 根据电液复合制动系统的联合仿真模型,对NEDC汽车循环测试工况进行仿真分析。由于紧急制动工况在NEDC汽车循环测试工况中没有设计,那么在仿真过程中就需要加入紧急制动工况,这样做的目的是为了验证当车辆紧急制动过程中ABS防抱死制动系统加入其中的一个工作状态。为了证整车模型搭建的合理性、整车制动性能以及在制动过程中所能回收到多少能量,因此把汽车行驶速度、制动跑偏值、滑移率、制动主缸压力、制动轮缸压力、SOC电池电量作为联合仿真模型性能测试的评价指标。
4 研究方案
4.1 电液复合制动系统方案设计 制动系统组成部分:踏板力形成模块、压力产生模块和压力调节模块,其中在踏板力形成模块中踏板位置传感器、踏板工作缸压力传感器是用来收集踏板开度信息、驾驶员的制动需求信息,踏板模拟器的功能是为驾驶人提供反馈制动感受。当制动系统失效时,踏板力形成模块将踏板力引入到压力产生模块当中,采用人力制动,确保此种情况下的制动安全。压力产生模块的作用主要是根据来自踏板力形成模块的制动压力信号利用助力电机和其他机构,在制动主缸内产生与之匹配的制动压力,实现踏板力与制动力的解耦。压力调节模块的主要功能是将主缸所传出的制动压力分配给4个轮缸,在紧急制动时通过切换4个电磁阀的通断来调节在各轮缸的压力。(图1)
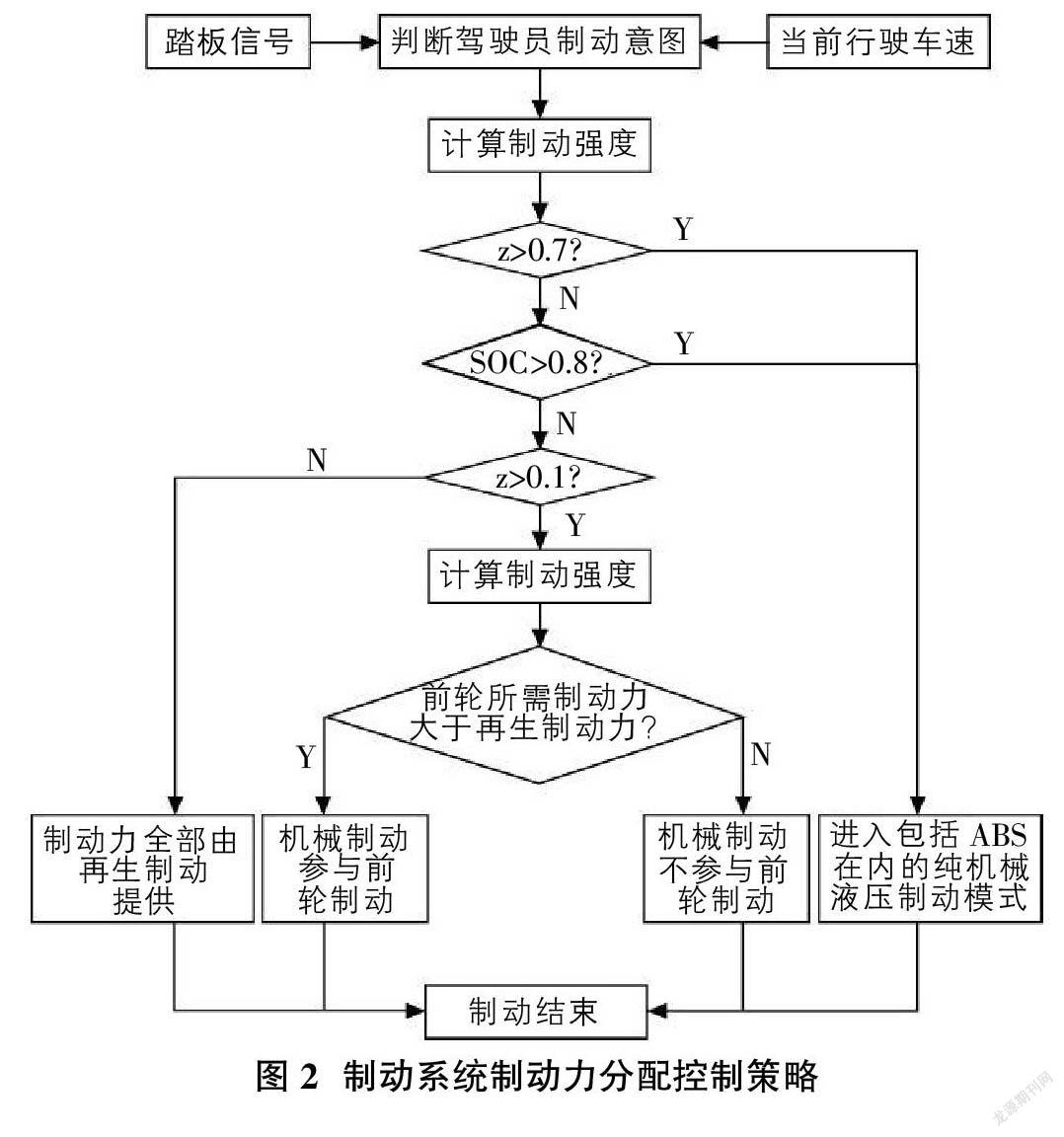
4.2 电液复合制动系统制动力分配控制策略设计 具体控制策略为:①当驾驶员踩制动踏板时,车速传感器和制动踏板传感器分别将汽车行驶速度和踏板位置信号传递给VCU,VCU通过此信号判断驾驶员的意向。②由于汽车在紧急制动时需要的制动力较大,如果只靠电机再生制动无法达到理想的制动状态,为了提高汽车在制动过程中的安全性,本设计的方案是当汽车在紧急制动时,不采用电机再生制动。根据实际道路测试的结果,将z的值等于0.7设定为汽车制动的电液复合与ABS制动相互切换的判断点。当z的值大于0.7时,制动策略将其定义为强度制动,此时启动纯机械液压制动模式,此模式包括ABS紧急制动;当z的值小于0.7时,控制策略通过监控电池的电量,从而做出对电池的保护策略。为了避免电池因过充电而导致不可不可挽回的破坏,该控制策略设定了SOC的值,当SOC值大于0.8时,制动系统采用纯机械液压制动模式,當SOC值在0.8以下时,控制策略就会判断此时的制动处于中低强度的制动。③根据ECE法规的规定,汽车的制动强度大于0.1时,汽车的前轴和后轴同时参与车辆制动,因此把z=0.1设定为电机再生制动与电液混合制动切换的点。当z的值小于0.1时,整车制动系统采取电机再生制动模式,汽车在制动过程中,车辆的前轮由电机再生制动提供制动力,后轮只有在停车、驻车时参与制动。当z的值在0.1~0.7范围内时,此时采用并行控制策略,后轮采用机械液压制动,整车控制器通过计算得出前轮所需要的制动力,如果前轮的所需的制动力只需要再生制动就可以满足的需求的话,前轮将由再生制动单独制动,如果再生制动无法满足前轮所需制动,则需要机械液压制动同时参与前轮制动,那么此时的前轮制动由再生制动和液压制动共同参与制动,此时汽车进入电液混合制动模式。
4.3 仿真模型搭建 驾驶员模型按照电脑设定好的工况发出驾驶指令,经过MCU处理完之后,通过信号线将驱动扭矩、制动扭矩信号发送给电机模型,制动压力信号输送给制动系统。当把电机作为驱动力来源是,电机控制器将向变速器发出一定的功率信号,此时电机控制器与电池相连的电缆将电流输送给电机,此时电机的作用是驱动车轮,当汽车在制动时,电机此时作为发电机,将回收的制动力产生的电流输送给电池,为电机充电。当制动系统接收到制动指令时,制动系统判断其制动模式和制动压力,并将其输送到整车控制系统。
4.4 联合仿真分析 首先对NEDC循环工况进行仿真分析,分别将整车行驶车速、制动跑偏值、滑移率、制动主缸与制动轮缸压力、电池SOC值等进行仿真分析,并将其作为联合仿真模型的评价指标。然后进行紧急制动工况仿真分析,同样将整车行驶车速、制动跑偏值、滑移率、制动主缸与制动轮缸压力、电池SOC值等进行仿真分析。
5 总结
汽车制动系统将朝着电气化、智能化的方向发展,本项目完成后能够不断优化相关参数使其实现最佳的纯电动汽车中的电液复合制动系统,提高制动系统的能量回收率,本项目研究的制动系统回收能量高达37%左右,增加纯电动汽车的续航里程,实现减小能耗、延长续航里程的目标。对于社会、环境、经济和技术等方面都存在积极的推动作用,在技术方面,推动新能源汽车,例如:纯电动、氢燃料等汽车的新技术的研究发展,加快技术的革新,促进汽车行业的发展进入一个全新的阶段;在环境方面,能够提高制动能量回收,延长电动汽车的续航里程,改变人们对汽车的消费观,提高电动汽车的销量,减少传统汽车的销量,从而减少尾气污染物的排放,绿化环境,改善大自然。
本项目设计适用于一种纯电动汽车的电液复合制动系统,采取并行控制策略的设计思路。分别在Carsim、MATLAB/Simulink仿真平台搭建整车模型和控制策略模型,然后建立联合仿真模型,并且在NEDC循环工况和紧急制动两种工况下分别对其进行仿真分析。这将会提高新能源汽车的能量回收是亟待解决的关键技术问题和热点问题,新能源汽车技术的改进便成为重要研究方向,有利于促进新能源纯电动汽车制动能量回收绿色智能大发展。
参考文献:
[1]浙江省人民政府办公厅关于印发浙江省加强节能标准化工作实施方案的通知[J].浙江省人民政府公报,2015(31):3-6.
[2]浙江省人民政府关于印发浙江省“十三五”节能减排综合工作方案的通知[J].浙江省人民政府公报,2017(15):4-23.
[3]浙江省人民政府办公厅关于全面推行“区域能评+区块能耗标准”改革的指导意见[J].浙江省人民政府公报,2017(20):13-15.
[4]DUOBA M, BOHN T, LOHSE-BUSCH H.Investigating pos- sible fuel economy bias due to regenerative braking in tes- ting HEVs on 2WD and 4WD chassis dynamometers[C]// Proceedings of SAE Technical Paper Series. Warrendale: SAE International,2005.
[5]SUNAO H, MOTOMU H. New challenges for brake and modulation systems hybrid electric vehicles (HEVs) and electric vehicles (EVs)[C]//Proceedings of International electric Vehicle Technology Conference.Yokohama: Bosch Corporation,2011.
[6]GUANG X, XIONG L, XU S,et al. Design and experiment of electro-hydraulic brake system[C]//Proceedings of Transportation Electrification Asia-Pacific.IEEE,2014.
[7]劉曦东.新能源汽车电液并行制动系统控制策略及匹配
技术研究[D].上海:同济大学,2009.
[8]李玉芳,吴炎花.电-液复合制动系统的控制策略多目标优化[J].计算机仿真,2013,30(01):232-236.
[9]王权.基于AMESim的纯电动汽车复合制动系统仿真研究[D].西安:长安大学,2014.
[10]陈晋市,刘思远,王同建,霍东阳,张美荣,张飞.8×8全电驱动越野车电液联合全液压制动系统实验验证[J/OL].兵工学报,1-8[2021-03-15].
[11]徐国胜,刘洪思,陈磊.一种电动汽车制动能量回收系统研究[J].汽车实用技术,2021,46(01):16-19.
[12]吴科甲,廖响荣,苏春锦,林凤功,陈辉淦.电动汽车电液复合稳定性控制器设计及分析[J].四川轻化工大学学报(自然科学版),2020,33(06):18-23.
[13]浙江省人民政府关于加快节能与新能源汽车产业发展
的实施意见[J].浙江省人民政府公报,2012(29):13-16.
猜你喜欢
科技传播(2016年19期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
商情(2016年43期)2016-12-23
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
新教育时代·教师版(2016年30期)2016-12-05
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25