直线超声马达运动系统的基本原理及故障分析
2021-01-10 12:13任泽生郝晓亮吴海翟玉卫
内燃机与配件 2021年24期
任泽生 郝晓亮 吴海 翟玉卫
摘要:介绍了一种直线超声马达的特点及原理,在分析其控制系统的基础上,概述了超声马达在设备中的接线结构及控制理论,总结了直线超声马达系统的常见故障,并提出了各种故障的处理措施。
Abstract: Introduces the characteristics and principles of the linear ultrasonic motor in the alignment tester. Based on the analysis of its control system, the wiring structure and control theory of the ultrasonic motor in the equipment are summarized, and the common faults of the ultrasonic motor system are summarized. Proposes various troubleshooting measures.
關键词:超声马达;驱动足;差分连接;运动偏差
Key words: ultrasonic motor;drive foot;differential connection;movement deviation
中图分类号:U472.43 文献标识码:A 文章编号:1674-957X(2021)24-0079-03
0 引言
随着科学技术的进步,与传统电磁马达工作原理不同的超声马达技术得到迅速发展和应用。超声马达具有结构小,无齿轮驱动;运动惯性小,响应快,断电自锁;位置速度控制好,位移精度高;防磁场干扰;低噪声等优点。国内外不断出现各种样式的超声马达,其中直线超声马达具有无需转换装置,直接输出直线运动及推力,分辨率和运动精度高等优点。1995年,Nanomotion公司提出了一种利用薄板面内一阶纵振和二阶弯振模态耦合的单驱动足直线超声马达,提高马达的输出效率,并逐步形成以HR系列为代表的产品,在精密加工测量仪器、半导体加工设备等领域占据一定份额,驻波直线超声马达在实际应用中越来越广[1]。
国内外文献主要集中在直线超声马达的结构设计优化[2]、建模仿真[3]、驱动模型[4]、能量损耗[5]、驱动足摩擦材料[6]等方向进行研究,还有部分文献对超声马达的进展[7]进行一系列的讨论。但文献少有对已应用在半导体、精密加工等领域的直线超声马达运动系统的常见故障及处理方式的讨论。
本文以Nanomotion公司研制的面内纵弯复合模态HR系列直线超声马达在对位测试机中的应用为对象,简单介绍超声马达基本原理,对超声马达运动系统的常见故障进行梳理分析,并给出相应处理措施。
1 超声马达系统基本原理
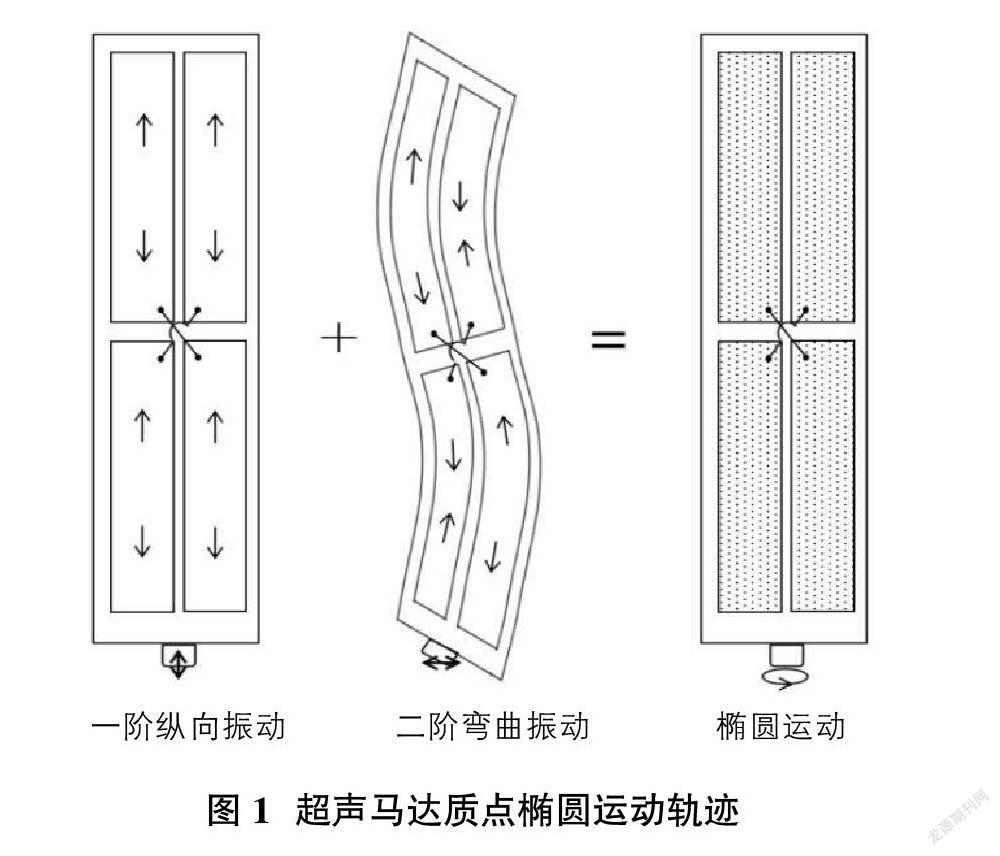
超声马达是整个运动系统的关键部件,其工作原理是利用压电材料的逆压电效应,激发弹性体(定子)在超声频段内的振动,并通过定、转子之间的摩擦作用将振动转换成转子的旋转或直线运动,从而驱动负载。通过从马达薄板一阶面内纵向伸缩振动E1模态和二阶面内弯曲振动B2模态的分析,如图1所示,可以阐明质点椭圆运动轨迹的形成过程。
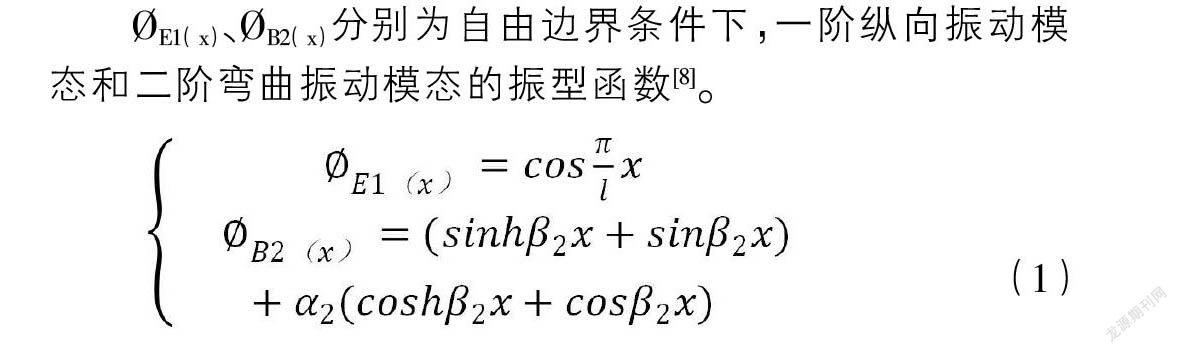
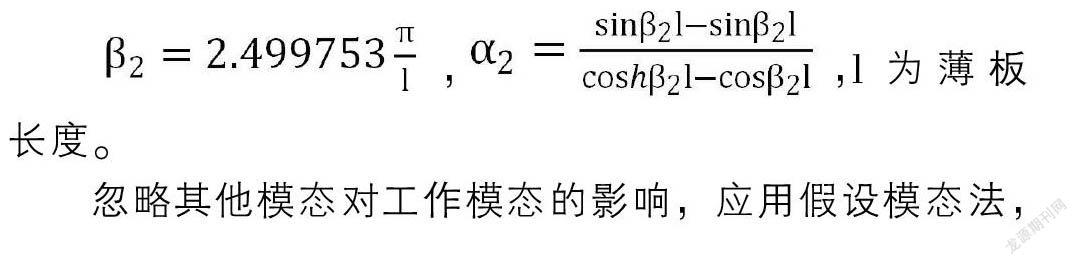
E1 (x)、B2 (x)分别为自由边界条件下,一阶纵向振动模态和二阶弯曲振动模态的振型函数[8]。
长度。
忽略其他模态对工作模态的影响,应用假设模态法,在定子上施加sin(ωt)和sin(ωt+?准)的两相电压激励信号后,定子被激发的模态相应为:
由式(2)可知,一阶纵振位移和相位与二阶弯振位移相位存在±π/2的相位差。并且一阶纵振位移方向与二阶弯振位移方向始终相互垂直,所以位于二阶弯振波幅处的驱动足可以形成椭圆运动轨迹。而定子表面质点的椭圆运动轨迹的好坏是影响直线型超声马达的输出性能的关键。
超声马达运动系统由控制器(PC或控制板)、驱动放大器模块、马达运动平台以及反馈系统四个方面构成。控制器将信号传输到驱动器上,由驱动器产生一个高频正弦波形,驱动平台上的HR马达压电陶瓷往复性振动,带动线性或环形陶瓷板在某一方向发生位移。位移的变化量再通过光栅尺及编码器(读头)反馈到控制器中,完成闭环控制。
2 超声马达系统常见故障
超声马达控制技术在半导体设备领域得到广泛的使用,但因磨损、能量消耗等问题,导致超声马达系统在实际应用过程中出现几种常见故障。
2.1 控制单元常见故障
控制单元主要根据设定的预置以及反馈信号,经过运算处理向控制放大器输出±10V以内的模拟指令。
由控制器故障引发的主要表现为:超声马达无动作,随机性运动报警等情况。通过软件界面检查马达系统参数及IO状态、位置信息,测量实际输出的模拟指令,或用外部操纵杆替代控制器等方式来判断控制器是否异常。
首先需要排除控制板或信号线接触不良导致的故障,拔插接口并使用电子清洗剂清理所有与控制板连接的接头,测量控制线线阻情况。其次通过Service configure界面,手动控制超声马达定距运动,如模拟量输出信号,但设定位置与实际运动位置有偏差引发报警,可通过调整PID、PositionLimits及DelayTime等参数改善马达运动情况。手动控制超声马达定距运动,如模拟量有输出但马达无动作,则需要通过硬件的操纵杆代替控制器输出控制信号,如果马达发生移动,可排除其他组件问题,基本确认控制器内部元件有故障。
2.2 驱动放大器接线及常见故障
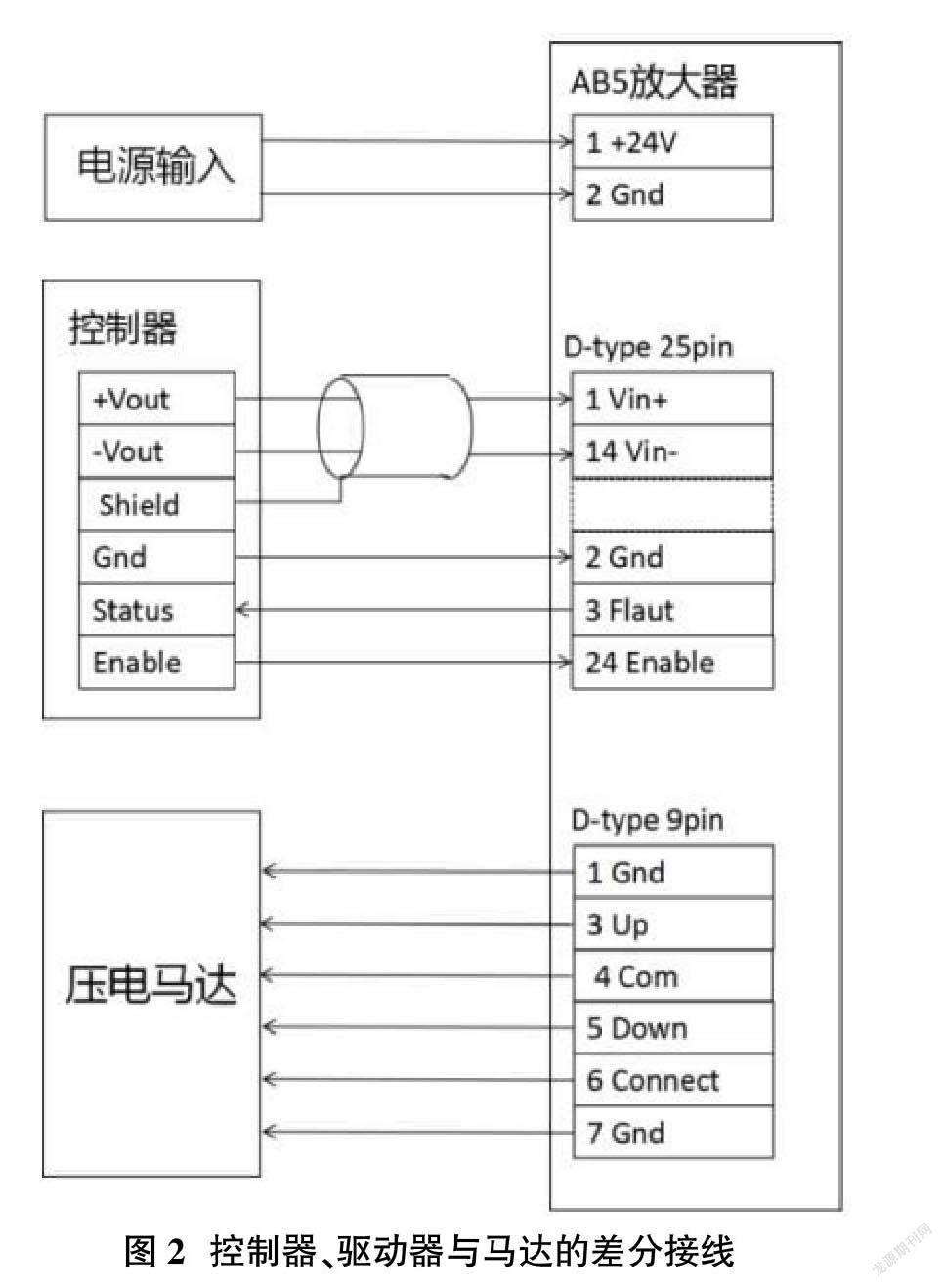
HR压电马达配备专用放大器,AB1A、AB2、AB4以及AB5系列,也可以用其他符合要求的驱动电路去控制。驱动器可采用差分连接、非差分连接或遥控杆连接多种方式。差分连接具有较强的抗干扰能力,如图2所示,故对位检测设备中也采用此种方式。
马达运动与驱动器的输入电压为线性响应,因此马达和驱动器的操作类似于由电压放大器对直流马达进行驱动。当工作在闭环伺服系统中时,驱动器作为一个速度放大器来工作,它从控制器接收+/-10V范围模拟信号,将控制器信号转换成交流电压以39.6kHz频率驱动电动机运动。当工作在一个开环模式中时,放大器能从外部操纵杆接收信号,提供连续或者步进模式的运动。在不施加驱动电压的情况下,压电陶瓷板静止不动,并在平台上产生保持力矩,保持扭矩的马达不会造成任何位置的改变。另外,马达具有级联功能,当需要增大驱动功率时,可在系统中加入多个马达。
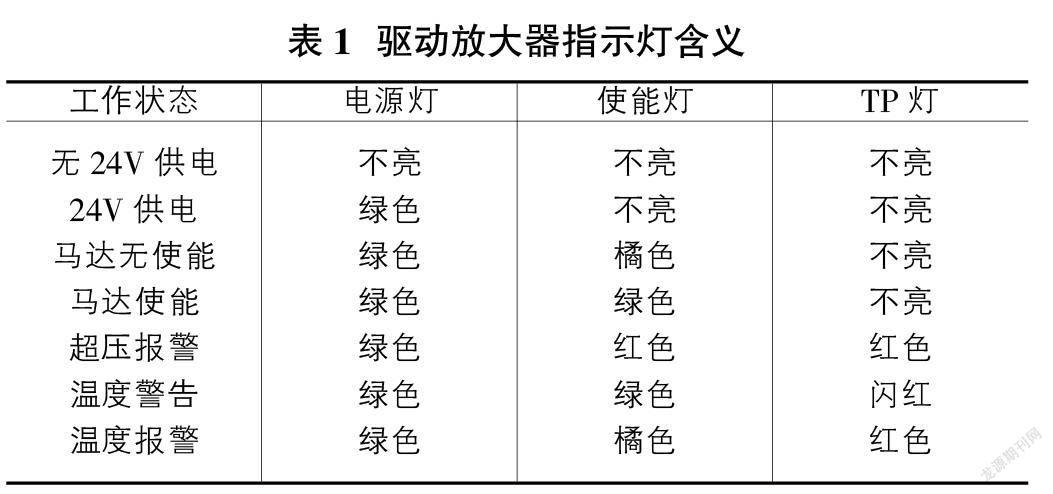
驱动放大器可根据前面板指示灯的7种状态,如表1所示,以及输入与输出信号判断是否正常工作。电源灯不亮需要检查24V供电是否正确,使能灯不亮需要检查马达与驱动器之间的接线。马达处于使能状态,输入±10V电压信号正常情况下,测量无输出信号,则驱动器内部电路故障。
驱动器内部由三个主卡组成。逻辑卡和驱动卡与所有AB5配置通用,可以随意进行交换替代,而剩余的参数卡,配置的马达不同,参数设定也不相同,需要进行特定的配置才可进行更换。
2.3 马达运动平台及常见故障
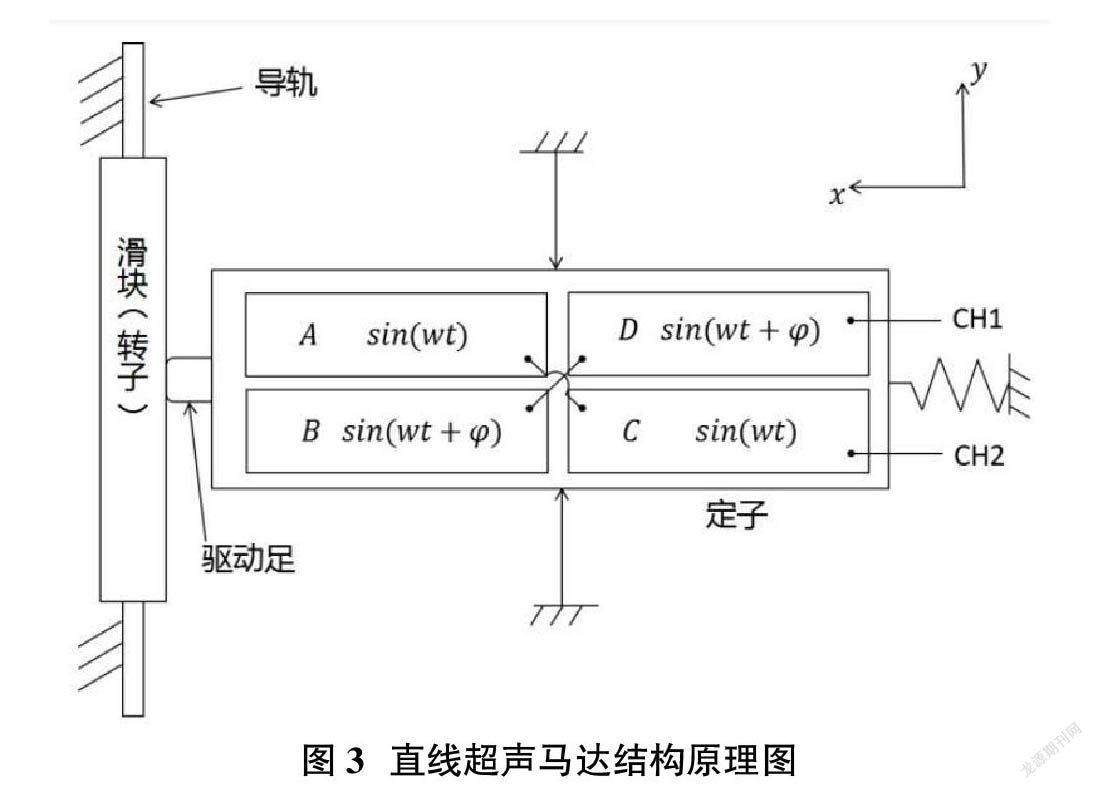
运动平台主要有超声马达、转子及导轨等部件构成。直线超声马达为该结构的核心组件,内部结构原理如图3所示,主要由8片压电陶瓷片和矩形金属板组成,压电陶瓷通过粘合剂贴在金属板上。压电陶瓷对称分布,金属板正面A、C陶瓷片施加sin(ωt)的电激励,B、D陶瓷片同时施加sin(ωt+?准)的电激励,其中两个信号的相位差?准=π/2,金属弹性体接地。如果要使动子反向运动,只需将?准变为-π/2。金属板背面另外4片压电陶瓷片分布与正面压电陶瓷片相对金属板成对称分布。
平台通过固定的超声马达的驱动足推动导轨上的陶瓷板(转子)进行往复运动。超声马达运动有两个重要的动力传送过程,一是通过压电陶瓷将电能转换为定子振动能的过程,主要取决于压电材料的性能。另一个是继续通过定子、动子之间的摩擦作用传送给动子机械能的过程,主要取决于定子表面质点的运动轨迹[9]。
马达部分能量损失以热能在马达温升上体现。当温度小于85℃时,马达正常工作;当温度升至85-100℃之间时,驱动器指示灯显示温度警告,马达正常工作;当温度超过100℃时,温度报警,马达停止工作,需降温至85度以下,重新复位使能,马达才能恢复工作状态。当频繁温度报警时,需降低环境温度、增大马达工作间隔、增加散热降温功能組件。
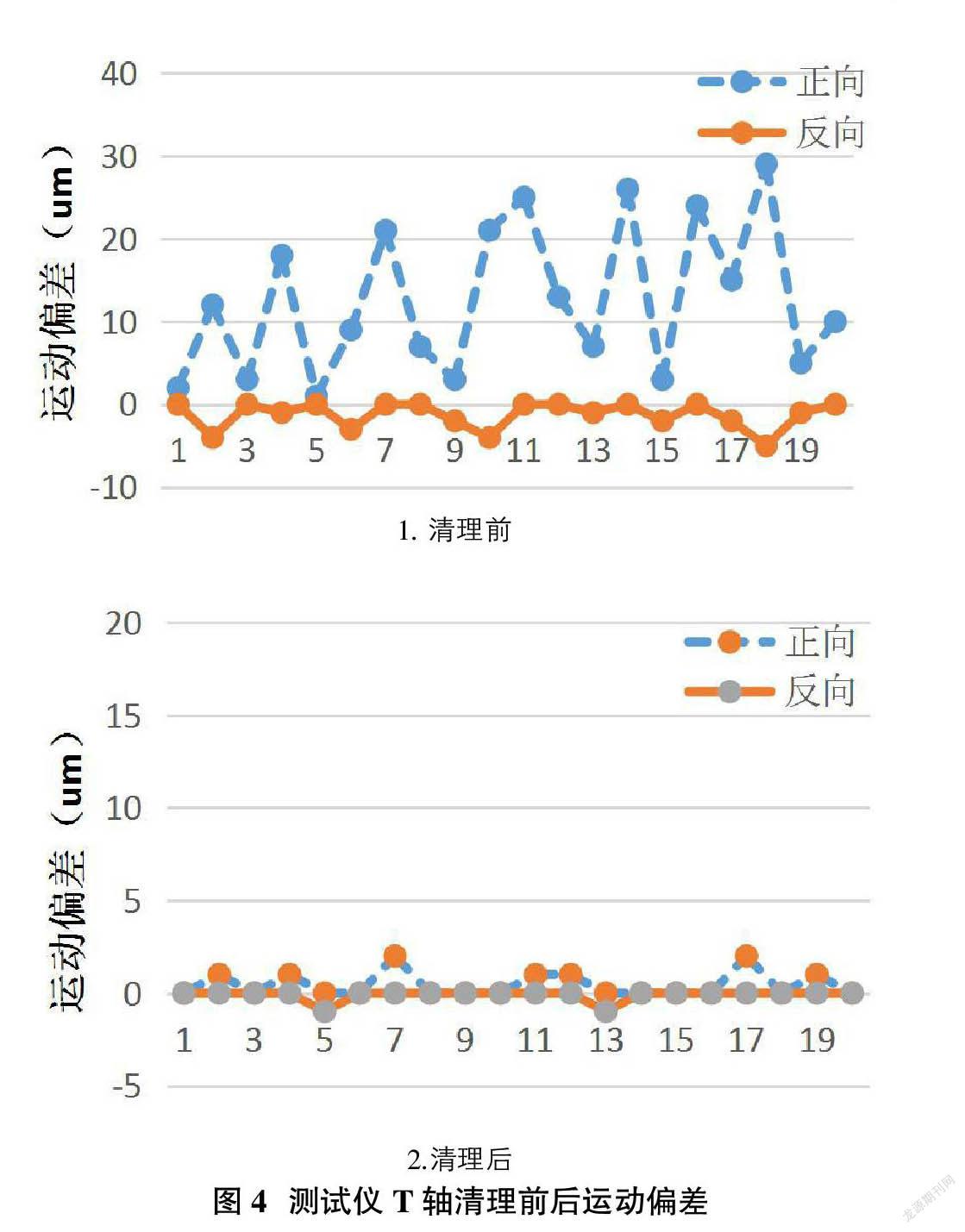
运动精度会受到摩擦损耗的影响,因此超声马达具有一定的使用寿命。使用一定时间或者出现运动偏差报警时,对运动平台进行拆卸,清理驱动足与导轨,可显著降低报警频率。图4中所示T轴马达清理前与清理后,超声马达运动20次正反偏差的改善情况。
清理过程中确保马达驱动足不受机械冲击,不用溶剂,只用无尘布擦拭即可。调试马达需先安装到位再加电测试。马达以谐振频率运行,对电路电容值很敏感,因此不能随意对马达自带电缆长度进行改变。
2.4 反馈系统常见故障
反馈系统包含光栅尺和读头等元件,常见故障由光栅尺沾污、读头松动导致,需要进行对光栅尺读头组件进行清理维护调试。
将驱动器设定为无使能状态,并移动滑块与马达的相对位置,反馈位移应也发生变化,读头应时刻亮绿灯。如在移动过程中读头指示闪动橘色或红色指示,则应清理光栅尺或者调试读头。用含有丙酮等快速挥发的溶剂无尘布,沿光栅尺刻度线的平行单一方向进行轻轻擦拭,避免擦拭过程中细小颗粒将刻度划伤。如光栅尺上有明显划痕,清理调试后仍异常,则需更换光栅尺或读头组件。
3 结束语
超声马达这种基于压电效应和超声振动的高新技术产品,凭借优异的性能,在自动控制、超精密加工、微电子测试等设备中正快速普及。通过对超声马达基本原理的认识,了解其控制方式及接线方式,掌握超声马达的常见故障的维护处理方法,可快速的恢复此类设备的正常运转,并一定程度提高马达的利用效率。
参考文献:
[1]陈乾伟.新型多工作模式塔形直线超声电机的研究[D].江苏:南京航空航天大学,2012.
[2]韦东东.仿树蜂压电步进式直线驱动器设计与实验研究[D].吉林大学,2019.
[3]史萌博,范桂芬,吕文中,曾炼.基于直线型超声马达的压电振子特性仿真分析[J].微电机,2013,46(11):10-13.
[4]赵春生.超声电机技术与应用[M].科学出版社,2017:313-351.
[5]张彦虎,曲建俊.直线超声马达研究进展[J].压电与声光,2019,41(04):590-595.
[6]曲焱炎.超声驱动微摩擦机理分析及各向异性摩擦材料研究[D].哈尔滨工业大学,2009.
[7]陈波,袁义坤,赵增辉,王育平,赵向东.微型直线超声电动机发展与研究现状[J].微电机,2007(07):90-93.
[8]吕其宝.直线超声电机微观摩擦磨损分析和实验研究[D]. 南京航空航天大学,2017.
[9]时运来.新型直线超声电机的研究及其在运动平台中的应用[D].南京航空航天大学,2012.