
电机驱动微装配在双光子制备微结构中的应用
2021-01-07 14:41夏锦涛丁阿飞陶卫东
宁波大学学报(理工版) 2021年1期
夏锦涛, 丁阿飞, 王 杭, 王 刚, 陶卫东
电机驱动微装配在双光子制备微结构中的应用
夏锦涛, 丁阿飞, 王 杭, 王 刚, 陶卫东*
(宁波大学 物理科学与技术学院, 浙江 宁波 315211)
对微结构的制作、微装配系统进行了研究. 采用飞秒激光双光子聚合微加工技术制作有底座、精细的三维立体“拱形”微结构, 其高250μm、长300μm、厚50μm. 将此微结构与实验室自主搭建的二维微装配平台相结合, 利用自主编程的人机交互界面驱动步进电机, 远程操控微装配设备; 将荧光闪烁陶瓷粉末装配到微结构中, 对装配后的微结构进行荧光光谱表征发现, 纯荧光粉末和微结构中的荧光粉末的发射光谱在测量误差范围内基本一致, 表明荧光粉末的光学性质未发生改变. 利用该装置可以将各类微纳米级材料和微结构进行装配, 形成含有不同材料的微结构系统.
双光子; 微装配; 步进电机; 荧光粉末; 远程操控
飞秒激光双光子聚合技术(Two-Photon Polymerization, TPP)[1-3]是一种新型激光直写三维图案的制作技术, 受到国内外诸多学者的青睐. 随着研究的不断深入, 其与其他学科相互交叉的可行性逐渐提高, 涌现出大量的研究成果. 如Galajda等[4]利用双光子聚合微加工技术制造微型转子, 并用光镊将微型转子进行组装, 形成一个复杂的微型系统; Maruo等[5]利用三维双光子微加工研制出一种光驱动微泵; Dai等[6]提出了一种基于光热气泡机器人的三维操作与装配技术, 气泡机器人以二维和三维2种形态操作和组装不同尺寸和形状的微结构; Fan等[7]利用磁驱动游动微机器人实现微流体自动捕获和操作, 能在二维捕获和操作体积为微型机器人几百倍的微粒.
微机电系统是集微传感器、微执行器、微机械结构、微电源、微能源、信号处理、控制电路、高性能电子集成器件、接口、通信等部件于一体的微型器件或系统[8], 是科技产品微型化的核心技术. 结合当前国内外的研究热点, 飞秒激光双光子聚合技术可以广泛应用于制作微机电系统零部件[9]. 如文献[10-11]设计了基于微装配的电位移平台控制系统, 并编写了人机交互界面和控制系统程序. 随着微装配的日益发展, 为满足微机电系统的设计要求, 完成高精度的微结构装配, 实现不同零件的拾取、移动和装配, 亟需能自动化装配且操作精度高的电控位移平台[12].
本文采用二维微装配设备配备2个高精度的步进电机(一个集微型计算机、驱动装置、移动平台和人机交互界面于一体的复杂系统), 设计了一套可远程操作的微装配设备, 通过可加热钨钢探针对微小颗粒或粉末在空气中进行操作. 同时, 基于树莓派(Raspberry Pi)开发了一套远程微装配程序, 并以荧光粉末为实验对象, 成功地将荧光粉末装配到微结构中. 该装配设备具有稳定性好、精度高、重复性强、易于操作等优点, 可为其他各类微纳米级材料(如石墨烯粉末)的微装配提供参考.
1 利用飞秒激光制作“拱形”微结构
TPP是一种空间真三维微结构构建技术, 其精细度可以达到微纳米级, 是制备三维微纳结构的理想工具. TPP的原理是: 2束飞秒红外或近红外光子在焦点相遇时, 2个光子能量会发生叠加, 从而导致光刻胶发生聚合[13]. 基于飞秒激光精细的加工特性, 利用三维绘图软件solidworks 2011版设计了一种“拱形”微结构(图1(a))作为装配载体, 微结构高250μm, 外边长300μm, 每个桥墩长50μm, 宽50μm. 首先将制备微结构的玻璃基底用丙酮超声处理10min, 以去除其表面的油污和灰尘; 然后用无水乙醇超声处理10min; 最后用去离子水超声清洗10min, 去除表面残余的无水乙醇. 用擦镜纸擦拭玻璃基底表面的水渍, 将基底置于紫外臭氧清洗机进行处理, 以增加基底与微结构的黏附力[14].
制作微结构时, 在载玻片两端加高420μm的垫片. 将“拱形”微结构另存为STL格式, 并导入Newport公司提供的μFAB双光子微加工平台的配套控制软件中, 软件会自动沿着轴将图案自上而下进行数据切片, 激光焦点通过逐层扫描图案轮廓, 从而在基底上实现图案的制作. 在制备微结构时, 为使制备出来的“拱形”微结构更加稳固, 首先在样品中制备2个相距200μm、高5μm、宽52μm的30层正方形“围墙”作为“底座”(图1(b)和(c)); 然后微调激光焦点位置, 导入“拱形”微结构的STL格式进行二次加工, 使其准确地置于“围墙”结构之上, 增加微结构整体的稳定性. 因制样时滴入的光刻胶较多, 需将加工后的微结构置于无水乙醇中浸泡, 并多次清洗, 使光刻胶充分溶解, 从而得到整洁的三维图案. 用透射式显微镜观察到的三维微结构如图1(d)所示.
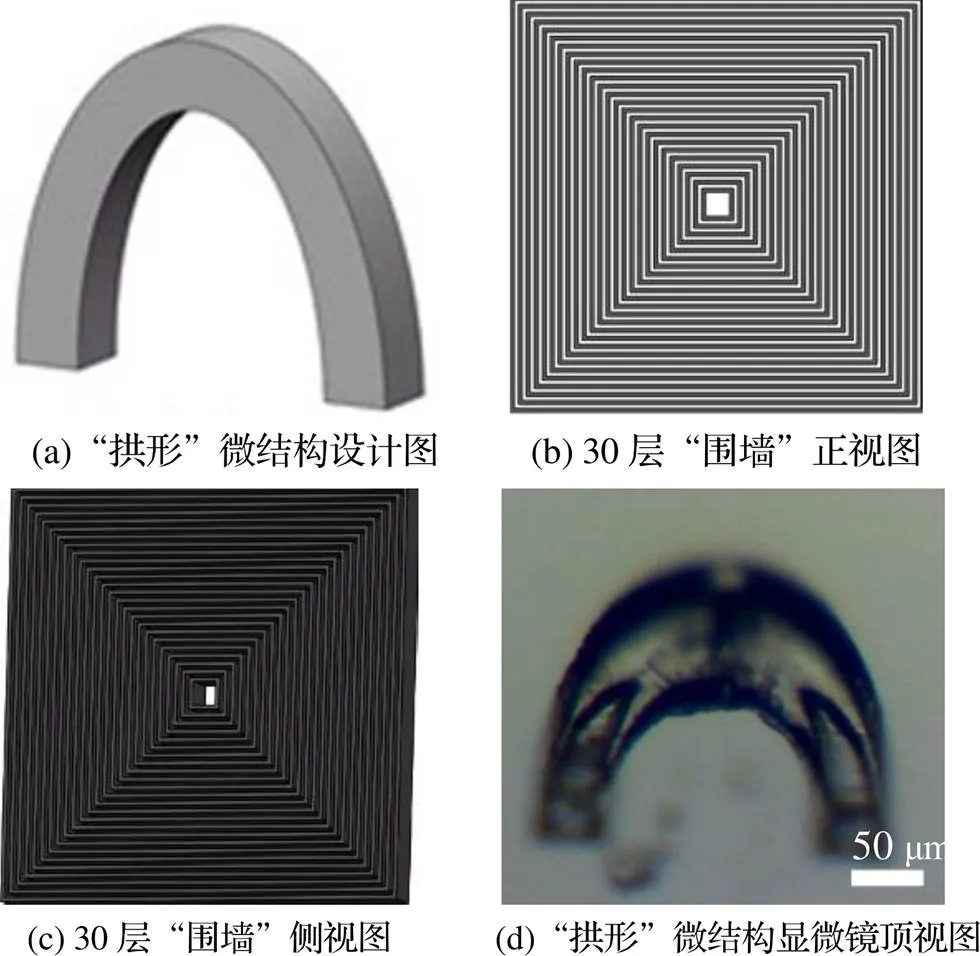
图1 “拱形”微结构设计和光刻图
2 二维微装配平台
二维微装配平台由显示设备、电机系统和输入设备3部分组成(图2). 图2中左边为USB便携式显微镜, 样品放置在显微镜镜头下方4cm的载物台上, 显微镜通过USB连接电脑1, 在电脑1上打开显微镜配套软件(Hiviewer)可以实时观察“拱形”微结构. 调节显微镜焦距, 使微结构清晰.

图2 远程微装配装置
在步进电机上方固定一个长、宽、高分别为7.0、4.0、1.5cm的平台(图3(a)), 2个步进电机可以单独或同时移动, 其运动方式由人机交互窗口控制. 2个步进电机各有1个驱动器(图3(b)), 驱动器电源由变压器供给(图3(c)). 电机的运转由Raspberry Pi控制(图3(d)), 连接方式如图3(e)所示.
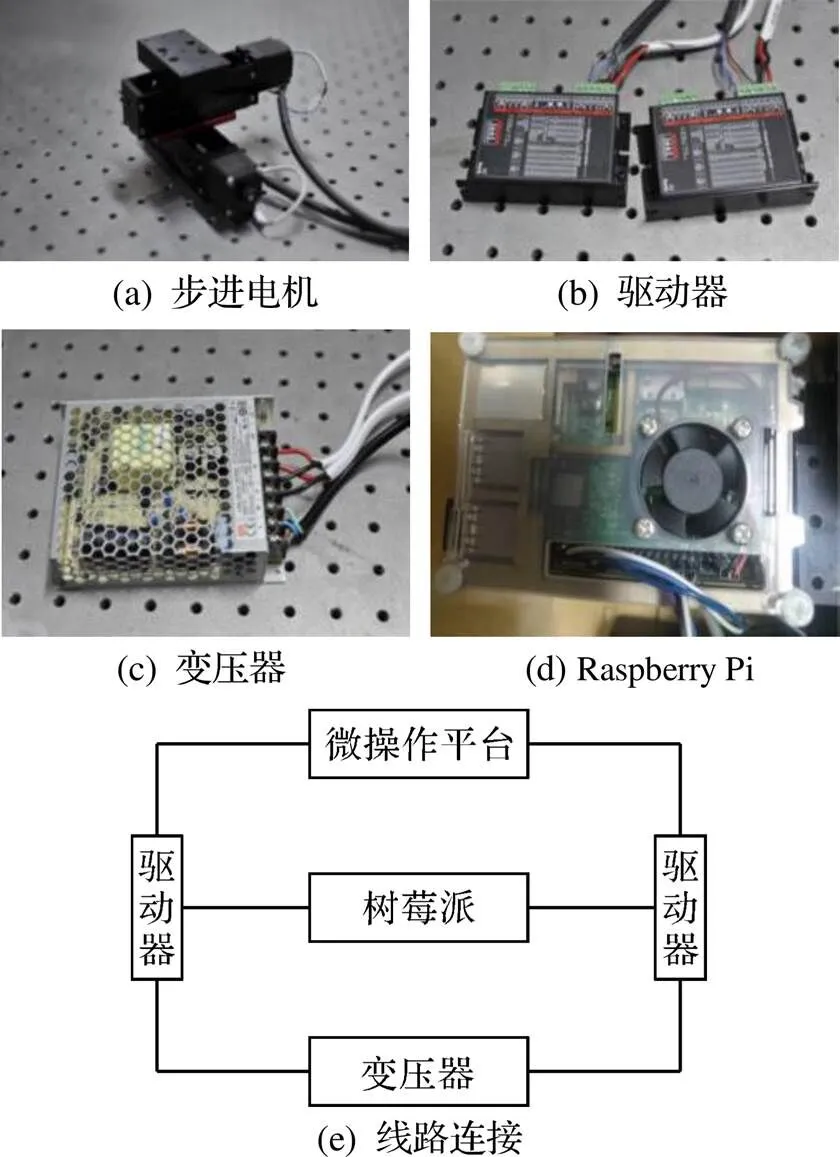
图3 电机系统零部件和线路连接
电机系统的小平台上固定有加热器, 并装有一根直径为20μm的钨钢探针. 通过调节步进电机下方的升降平台可以控制探针针尖与载玻片的垂直距离.
输入设备是与Raspberry Pi通过局域网连接的电脑2. 打开软件(VNC Viewer), 连接Raspberry Pi进入人机交互界面, 控制针尖移动, 使其与微结构在同一视场内. 2个步进电机作为轴和轴移动臂, 利用人机交互界面控制探针针尖进出微结构. 将样品置于工作台上, 调整步进电机升降台高度, 使钨钢针针尖与玻璃基底上的微结构处于同一水平面. 工作台前方有连接电脑1的便携式电子显微镜, 可以实时观测微结构与钨钢针针尖的相对位置. Raspberry Pi操纵轴和轴移动臂. 在2台电脑上安装计算机远程连接软件(TeamViewer)后,通过电脑1上Hiviewer实时观察微装配过程. 因此, 在同一局域网下, 启动人机交互界面程序, 操控轴和轴移动臂, 即可实现微结构装配.
3 电机驱动远程微装配
使用输入设备(电脑2)连接Raspberry Pi, 打开人机交互界面(图4), 操控轴和轴移动臂, 或键盘上“←、↑、→、↓”键, 控制步进电机的移动, 移动探针模拟荧光粉末的装配过程.

图4 人机交互界面
在人机交互界面“Length”框中输入移动步数(1步=10μm), “Speed”框中输入对应速度值(程序运行延迟时间, 数值越小, 程序语句执行延迟越短,探针针尖移动速度越快). 点击“Up、Down、Left、Right”按钮, 电机会以对应的速度移动相应的距离. “Coordinate”中会显示电机移动终止坐标. 默认初始坐标为(0,0), 移动1步就会显示当前的坐标, 且该人机交互程序有路径记忆功能, 能够重复移动路径. 利用人工交互界面移动钨钢针尖深入微结构后, 点击“Zero”坐标清零, 针尖坐标会将此位置初始化为(0,0). 随后, 把钨钢针尖移动到平面内任一位置(,), 点击“Back Origin”, 针尖自动回到初始位置(0,0), 点击“Back”又可返回(,)位置. 点击“Repeat”重复实现已记录的装配过程, 电机会在原点(0,0)和固定位点(,)间反复移动. 当探针未拾取荧光粉末时, 微装配的模拟过程如图5所示. 首先调整轴平台, 使探针和微结构处于同一维度(图5(a))作为探针的起始位置. 点击“Right”, 使针尖向右移动, 到达微结构的正前方(图5(b)). 点击“Up”, 调整速度, 使针尖向前移动, 进入微结构内部(图5(c)).点击“Zero”, 以此作为(0,0)点,点击“Down”使探针向后移动, 退出微结构(图5(d)). 再次点击“Left”, 使微结构持续向左移动, 结果如图5(e)和(f)所示. 以退回界面最终位置作为(,)点, 点击“Back Origin”, 探针沿原路进入微结构中, 点击“Repeat”, 即可使探针从(,)点沿原路径进入微结构, 并再次回到(,)点, 使探针在这2个位置间移动.
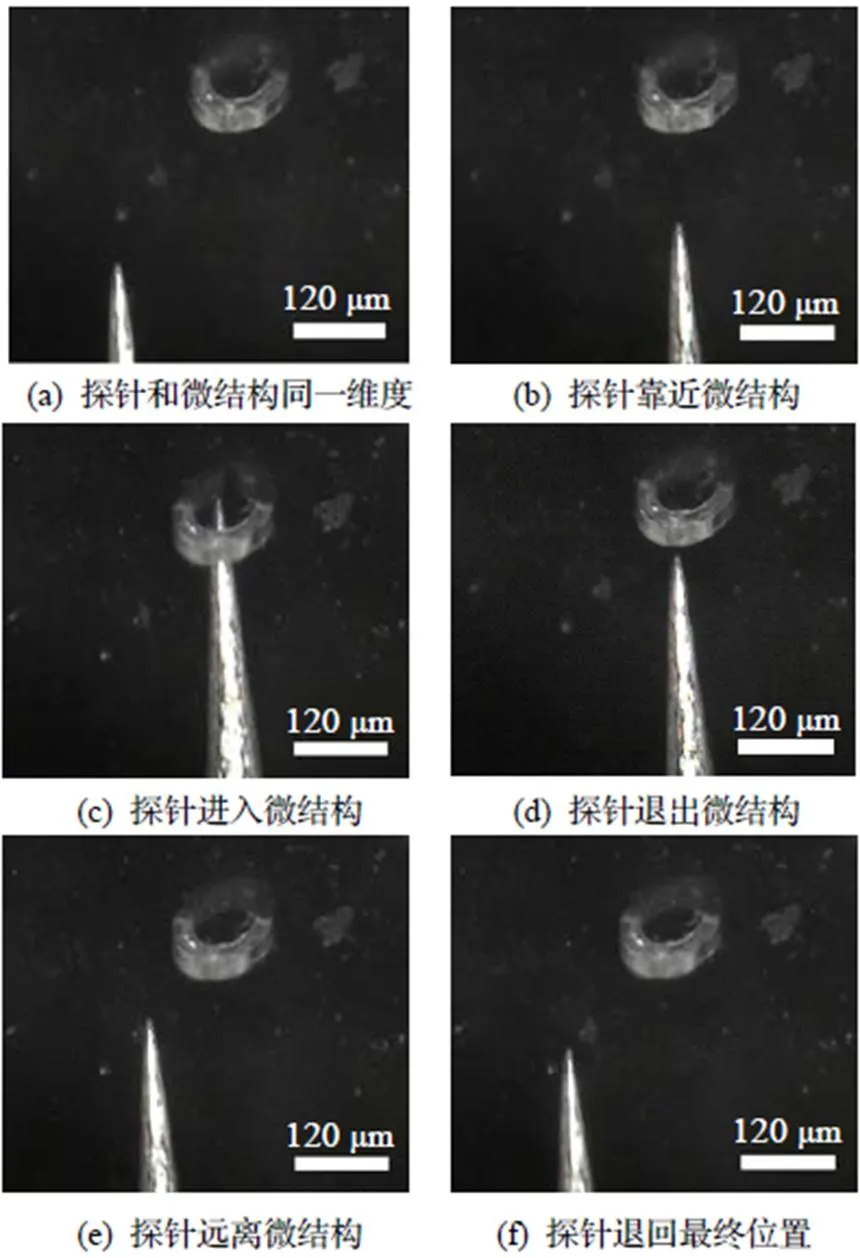
图5 探针进出微结构流程
取少量荧光粉末放置在干净载玻片上, 将样品放置于远程装配系统的载物台上, 操控钨钢针尖拾取荧光粉末. 当针尖拾取荧光粉末时, 将制备有微结构的样品放在载物台上, 通过显微镜实时观察微结构与粘有荧光粉末钨钢针尖的相对位置, 最后将荧光粉末装配到微结构中. 当针尖把荧光粉末转移到微结构的正前方时, 使用加热器使探针针尖迅速升温至400℃, 接着操控探针与玻璃面相互摩擦, 使荧光粉末脱落, 之后移动探针, 推动荧光粉末填充到微结构中. 运用微装配系统装填荧光粉末过程如图6所示.
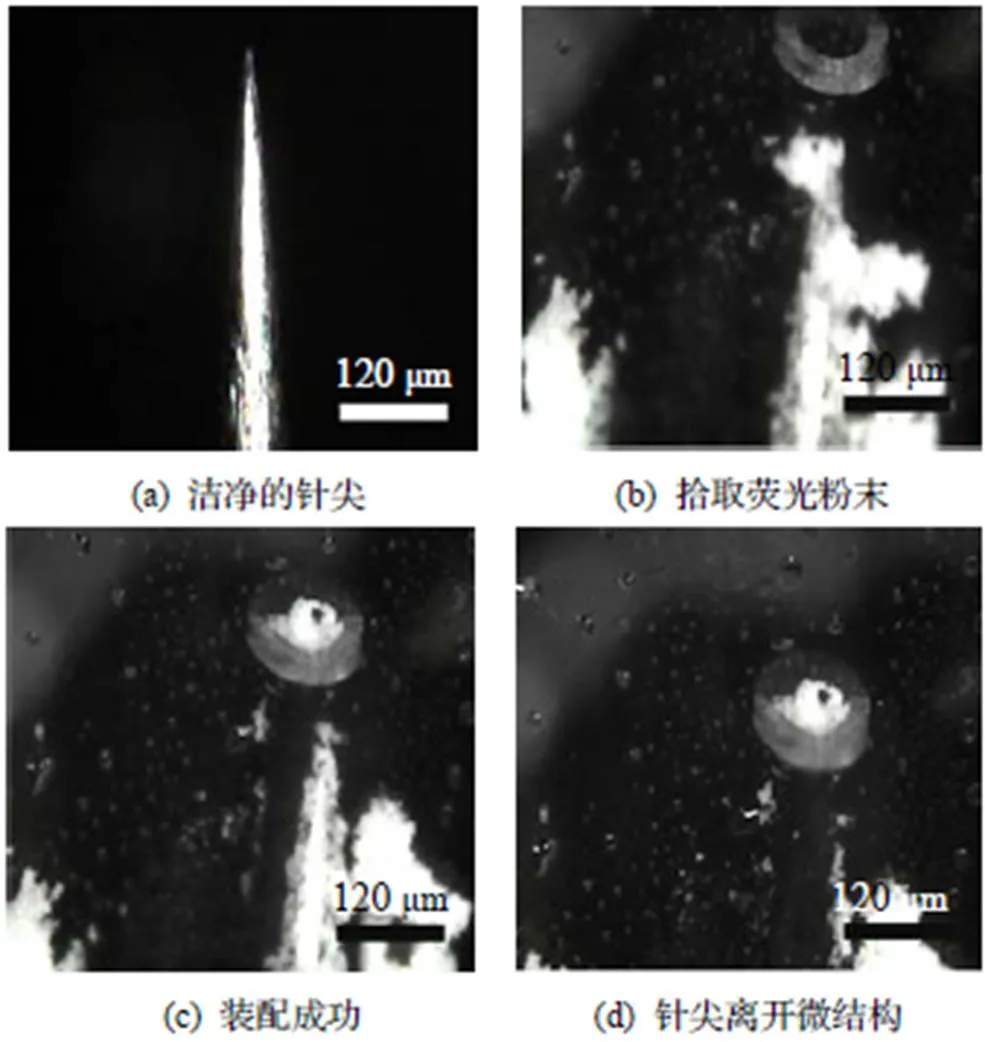
图6 荧光粉末装配流程
完成一次荧光粉末的装配后, 可将停留在微结构中的针尖位置清零(点击“Zero”), 然后移动针尖继续拾取一些荧光粉末, 仅需点击“Back Origin”便可自动将荧光粉末装配到微结构中. 如果荧光粉末都处于同一位置, 可以点击“Repeat”重复拾取荧光粉末, 并装配到微结构中.
4 荧光光谱检测
荧光光谱检测是一种常用的荧光材料的表征手段[15-16]. 对装配完成的微结构中荧光粉末和纯荧光粉末采用拉曼光谱分别进行5次荧光光谱表征, 并将数据进行归一化处理, 以探究微结构对荧光粉末性质是否有影响. 把完成装配的微结构放置载物台上, 因为光刻胶材质透明, 因此采用波长为405nm的激光作为激发光, 可以直接穿过微结构照射在荧光粉末上, 得到5次测量的荧光粉末峰位波长(均值约为540nm). 取少量荧光粉末置于载玻片上, 用波长为405nm的激光作为激发光进行荧光光谱表征, 5次测量的纯荧光粉发射光的平均峰位波长约为541nm, 两者相差小于1nm, 表明在光谱仪测量误差内荧光粉末的性质没有发生变化. 荧光光谱如图7所示.

图7 荧光光谱检测
5 结论
利用飞秒激光双光子聚合技术制备了高250 μm的稳固“拱形”微结构, 并自主研发了远程操控微装配装置, 实现了荧光粉末的电动化装配, 且装配成功的荧光粉末的发射光未发生改变, 发射光峰值波长约为541nm. 本文研发的微装配装置具有稳定性强、重复性好、易于操作和成功率高等优点, 利用该微装配系统能实现各类微纳米材料的装配, 可为复合材料的制备以及微机电系统的装配提供参考.
[1] Gattass R R, Mazur E. Femtosecond laser micro- machining in transparent materials[J]. Nature Photonics, 2008, 2(4):219-225.
[2] 曹小文, 张雷, 于永森, 等. 飞秒激光制备微光学元件及其应用[J]. 中国激光, 2017, 44(1):46-58.
[3] 孙树峰, 王萍萍. 飞秒激光双光子聚合加工微纳结构[J]. 红外与激光工程, 2018, 47(12):64-68.
[4] Galajda P, Ormos P. Complex micromachines produced and driven by light[J]. Applied Physics Letters, 2001, 78(2):249-251.
[5] Maruo S, Inoue H. Optically driven micropump produced by three-dimensional two-photon microfabrication[J]. Applied Physics Letters, 2006, 89(14):144101.
[6] Dai L G, Ge Z X, Jiao N D, et al. 2D to 3D manipulation and assembly of microstructures using optothermally generated surface bubble microrobots[J]. Small, 2019, 15(45):1902815.
[7] Fan X J, Sun M M, Lin Z H, et al. Automated noncontact micromanipulation using magnetic swimming microrobots [J]. IEEE Transactions on Nanotechnology, 2018, 17(4): 666-669.
[8] Egawa M, Ishida T, Jalabert L, et al.realtime monitoring of nanoscale gold electroplating using micro-electro-mechanical systems liquid cell operating in transmission electron microscopy[J]. Applied PhysicsLetters, 2016, 108(2):023104.
[9] 张颖, 吴俊, 魏江南, 等. 基于微机电系统技术的光纤加速度传感器[J]. 光学学报, 2018, 38(6):65-71.
[10] 王永杰, 张嘉易, 董福禄, 等. 基于微装配的电控位移台控制系统设计[J]. 成组技术与生产现代化, 2014, 31(1):25-28.
[11] 王苗辉, 李艳, 宋武, 等. 基于科学实验的人机交互界面设计研究——以格力空调为例[J]. 图学学报, 2019, 40(1):181-185.
[12] 吴文荣, 余大海, 裘祖荣, 等. 毫米器件半自动微装配系统研制[J]. 传感器与微系统, 2013, 32(1):83-86; 90.
[13] 龚莹, 蒋中伟, 周拥军, 等. 飞秒激光双光子微细加工技术及研究现状[J]. 光学技术, 2004, 30(4):637-640.
[14] 蔡华, 曹振博, 李方骏, 等. 微通道板表面碳污染的去除[J]. 中国建材科技, 2017, 26(1):33-35.
[15] Chourpa I, Cohen-Jonathan S, Dubois P. Mapping Chemical and Structural Composition of Pharmaceutical and Biological Samples by Raman, Surface-Enhanced Raman and Fluorescence Spectral Imaging[M]. Berlin: Springer, 2012:243-255.
[16] Feng L Y, Qin Z Y, Huang Y J, et al. Boron-, sulfur-, and phosphorus-doped graphene for environmental applications [J]. Science of the Total Environment, 2020, 698:134239.
Application of motor driven micro-assembly in two-photon fabrication of micro-structure
XIA Jintao, DING Afei, WANG Hang, WANG Gang, TAO Weidong*
( School of Physical Science and Technology, Ningbo University, Ningbo 315211, China )
In order to study the assembly methods of various micro-nanometer materials and micro-structures, the fabrication of micro-structures and the working mode of micro-assembly systems are first studied. The femtosecond laser two-photon polymerization micro-machining technology is employed to fabricate a fine three-dimensional “arch” micro-structure with a base, with 250μm in height, 300μm in length and 50μm in thickness. The micro-structure is combined with the two-dimensional micro-assembly platform independently built in the laboratory, and the self-designed human-computer interface is used to drive the stepping motor. The micro-assembly device can be remotely controlled to assemble the fluorescent scintillation ceramic powder (hereinafter referred to as fluorescent powder) into the micro-structure. Through the fluorescence spectrum characterization of the assembled micro-structure, the results show that the emission spectrum of the pure fluorescent powder and the fluorescent powder in the micro-structure is basically the same within the measurement error range, and the optical properties of the fluorescent powder remain unchanged. Through this experimental device, we can implement the electric assembly of fluorescent powder and micro-structure without affecting the properties of fluorescent powder. We can also use this device to assemble a vast variety of micro-nanometer materials and micro-structure so as to form the micro-structure system with different materials.
two-photon; micro-assembly; stepping motor; fluorescent powder; remote control
O437
A
1001-5132(2021)01-0065-05
2019−12−12.
宁波大学学报(理工版)网址: http://journallg.nbu.edu.cn/
国家自然科学基金(11704204).
夏锦涛(1994-), 男, 安徽六安人, 在读硕士研究生, 主要研究方向: 飞秒激光微加工. E-mail: 13345961994@163.com
陶卫东(1969-), 男, 浙江宁波人, 教授, 主要研究方向: 飞秒激光微加工. E-mail: taoweidong@nbu.edu.cn
(责任编辑 史小丽)
猜你喜欢
农业工程学报(2022年10期)2022-08-22
人人健康(2021年16期)2021-12-01
表面技术(2021年7期)2021-08-03
北京化工大学学报(自然科学版)(2021年2期)2021-05-12
扬子江(2020年4期)2020-08-04
电子制作(2019年14期)2019-08-20
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
科学之谜(2018年10期)2018-01-02
大众健康(2017年8期)2017-08-23
少年文艺·开心阅读作文(2017年7期)2017-08-05
