
基于四阶牛顿迭代法的Fast-ICA改进算法
2021-01-04 00:59郭松林徐海鹏
黑龙江科技大学学报 2020年6期
郭松林,徐海鹏
(黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022)
0 引 言
现有的信号分析方法有很多,常用的小波分析法和傅里叶分析法。基于傅里叶变换的信号处理方法由于非周期采样产生泄露误差,使测得的幅值、频率和相角偏离实际值,特别相位测量误差更大。相对于傅里叶变换分析,小波分析具有较大优势,因为小波函数在时域和频域内具有局部分析和多分辨率分析的优势。但由于采样点序列以及所选用的滤波器长度有限,因此,在计算边缘点时会遇到边界问题,随着分解不断进行,重构误差会不断增大。此外,小波分析的运算较复杂,且小波基函数也不易选择,这也是小波分析方法自身的缺点。
独立分量分析方法(ICA),是近年发展起来的一种有效的盲信号分离方法。该算法可以仅仅根据输入信号的一些基本统计特征,在瞬时混叠参数不清楚的情况下,由观测信号恢复出源信号的过程。通过不断发展和完善的算法理论,使其在语音信号处理、图像处理、无线通信技术、生物医学工程和电气领域等应用十分广泛[1]。而基于牛顿二阶收敛的快速独立分量分析(Fast-ICA)算法,相比于ICA算法收敛速度虽然更快,但依然存在收敛精度和分离性能不高的问题。
笔者为了进一步提高算法的收敛速度和分离性能,减小算法的误差,在原Fast-ICA算法的基础上改进算法,使改进后的算法满足四阶牛顿收敛特性,提升改进后算法的收敛精度与分离性能。
1 盲源分离
1.1 盲源分离原理
典型的盲源分离(BSS)原理[2]如图1所示。
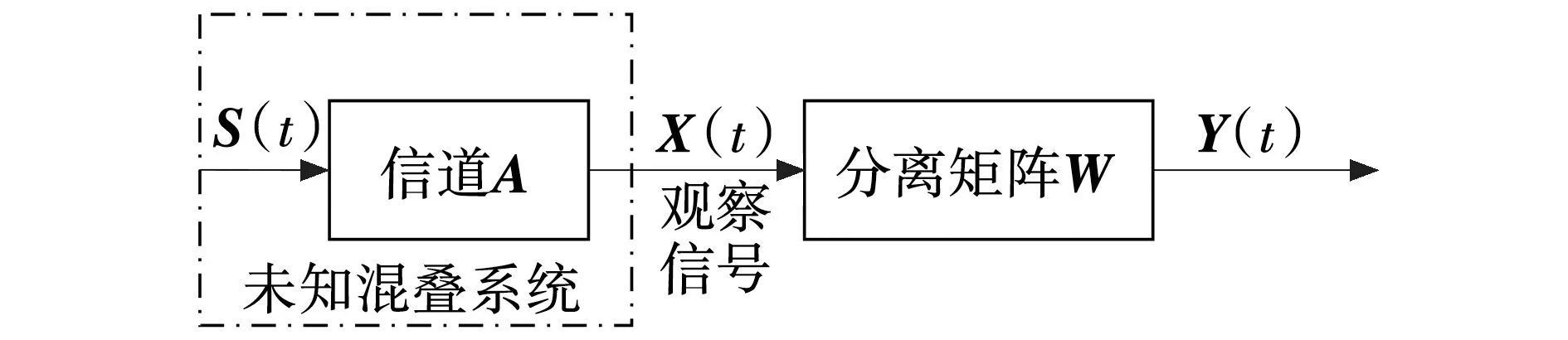
图1 盲源分离原理Fig. 1 Schematic of BSS
n个相互独立的源信号S(t)=[s1(t),s2(t),…,sn(t)]在经过一个未知的混合系统后,得到观测信号X(t)=[x1(t),x2(t),…,xm(t)],可以近似的表示为
X(t)=A·S(t),
式中:A——m×n维满秩可逆混合矩阵;
X(t)——观测信号;
S(t)——源信号。
当仅知道观测信号X(t)时,可以通过盲源分离优化算法得到分离矩阵,从而得到分离信号为
Y(t)=w·X(t),
式中:w——m×n维满秩可逆混合矩阵;
Y(t)——分离信号。
Y(t)=[y1(t),y2(t),…,yn(t)],盲源分离算法就是根据y(t)之间的统计独立性,确定分离矩阵w的过程。为了使盲源分离可以有效地分离,往往需要一些条件来约束,盲源分离最基本的是假设源信号彼此之间是统计独立的,混合矩阵是可逆的,在源信号中高斯信号至多有一个[3]。
1.2 Fast-ICA算法
分离矩阵w是盲源分离以信号的某种独立性为依据确定的。度量信号统计独立性的两个常用指标是峭度和负熵,但峭度容易受到野值的影响,但熵在信息论中是一个较为稳健的判据。随机信号的负熵[4]可以表示为
J(y)=[E{G(y)}-E{G(yg)}]2,
式中:J(y)——负熵;
E{G(y)}——G(y)的数学期望;
y——变量Y的分量;
yg——具有与y同样方差的高斯变量。
如果要分量y的数学期望E{G(yg)}越小,就需要其非高斯性越强,负熵J(y)越大。依据负熵判据寻找矩阵w,使负熵J(y)最大。即对E{G(y)}=E{G(wTx)} 求极值,使最大。因此,导数应为

wT——分离矩阵w的转置矩阵。
g为G的导数,设:xt为t时刻的输入变量X的分量,t+1时刻的输入变量X的分量由牛顿迭代定理可表示为

t时刻的算法的输入变量分离矩阵为
式中,wt——t时刻的分离矩阵。
因此,分离矩阵为
2 改进的Fast-ICA算法
不难证明当在原有 Fast-ICA 算法中牛顿迭代算法式是二阶收敛的。由于牛顿算法收敛阶数越高,算法的收敛速度越快,修正原式,使之满足四阶收敛,减小改进后算法的误差并提高收敛速度[5]。其修正形式为
由修正后的牛顿迭代公式,可推得改进 Fast-ICA 算法公式为
改进Fast-ICA算法分由预处理(中心化处理和白化处理)与基于负熵的盲分离算法两部分组成,流程如图2所示。
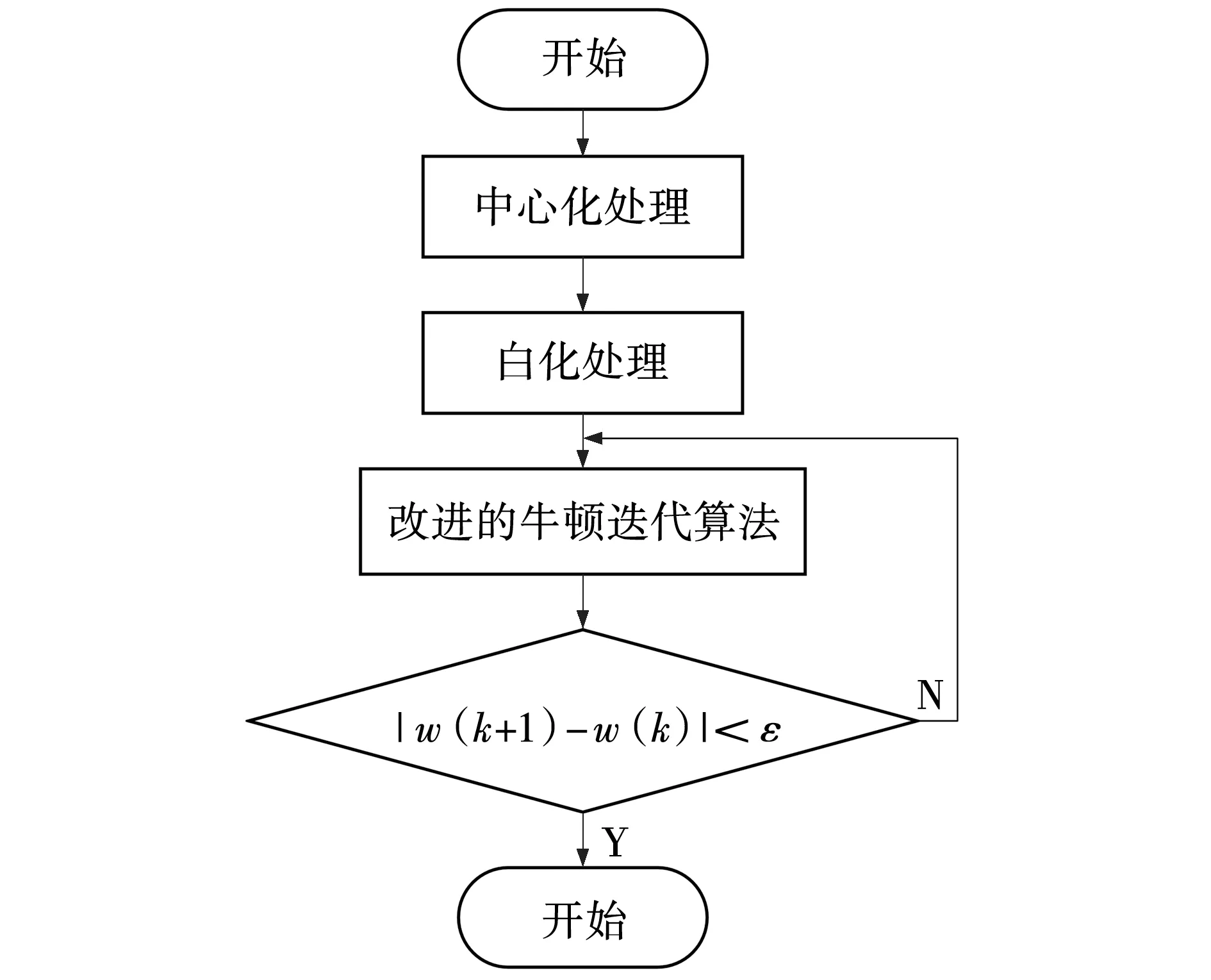
图2 改进算法流程Fig. 2 Improved algorithm flow
2.1 收敛性证明
设f(x)为实数域内四阶可导函数,如果a是f(x)的单根,且x0充分靠近a,则可以根据修正后的牛顿迭代公式定义改进后牛顿迭代误差方程为
证明:设
en=xn-a,
式中:f(a)=0,f′(a)≠0,y(a)=a,
计算得

则,迭代公式可以表示为
因此,改进后的Fast-ICA算法是四阶收敛的。
误差方程为
2.2 算法误差的确定
通过以下方法来确定改进后的误差,设
函数表达式为
四阶Fast-ICA算法的最小逼近误差为
假设四阶Fast-ICA误差为10-6>ε>10-7,构建Lyapunov函数为
V(x)=εe-(x-a),
当误差为10-6>ε>10-7时,算法是一定收敛的。对比原算法10-5>ε1>10-6有明显减小[7]。
3 仿真实验与性能
利用Matlab实现Fast-ICA算法对混合信号的分离,为了验证改进算法的有效性,对比分析改进后算法与原算法的仿真结果。
源信号为三路不同的语音信号,利用Matlab将源信号通过随机混合矩阵混合,得到混合信号。三路原始语音信号如图3所示,混合后语音信号如图4所示。

图3 源信号Fig. 3 Source signal

图4 混合信号Fig. 4 Mixed signal
由图4可见,得到混合信号后,分别利用传统的Fast-ICA算法和改进后的Fast-ICA算法分离混合信号。从图5、6可以看出,改进后的算法使语音信号成功分离。

图5 Fast-ICA分离信号Fig. 5 Fast-ICA separation signal

图6 改进的Fast-ICA分离信号Fig. 6 Improved Fast-ICA separation signal
为了比较两种算法实时性,分别对两种算法进行了10次信号分离实验,记录了每次实验两种算法迭代时间,结果如图7所示。原算法和改进后的算法的平均迭代时间分别为0.033 6和0.025 6 s,由图7可以看出,改进后算法的分离时间要比原算法短,即前者提高了收敛效率[8]。
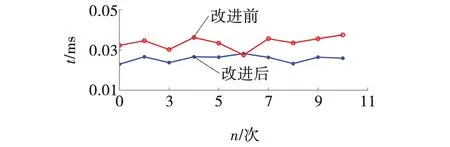
图7 两种算法迭代时间Fig. 7 Iteration time of two algorithms
图8a、b分别是改进后算法的误差图和原算法的误差图。由图8可以看出,改进后的Fast-ICA算法比原来的Fast-ICA在检测精度上有了显著的提高。综上所述,改进后的Fast-ICA算法不仅可以将各个信号有效的分离,而且在实时性和准确性上都要优于原有的Fast-ICA算法[9]。
盲源分离算法的分离性能可以通过算法PI值来衡量[10],其计算公式为
式中:ePI——算法的PI值;
cij——混合矩阵与分离矩阵的乘积;
m——变量的个数。
如果PI值越小,则说明算法的分离的性能越好,当为零时,证明信号已经完全分离,通过计算,得到改进后算法的PI值为0.52,原算法的PI值为0.66。改进后的算法的值要明显的小于原算法值,由此说明改进后的算法的分离性能要更好。
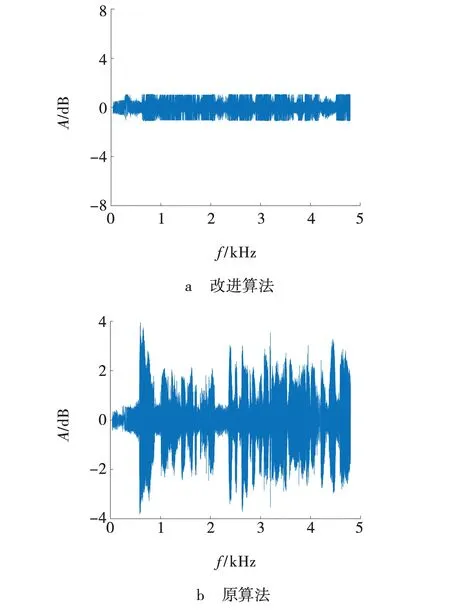
图8 改进算法与原算法的误差对比Fig. 8 Comparing error between improved algorithm and original algorithm
4 结束语
针对原算法收敛速度较慢,收敛精度不高的问题,改进原有算法,使其满足四阶牛顿收敛,证明了其收敛性,确定了改进后算法的误差范围。采用PI值来说明算法的分离性能,最终通过仿真实验证明了文中提出的改进的Fast-ICA算法的代次数和迭代时间均小于原算法,分离信号更接近源信号,分离性能更好。
猜你喜欢
小哥白尼(趣味科学)(2022年7期)2022-09-20
中山大学学报(自然科学版)(中英文)(2020年6期)2020-12-04
华东师范大学学报(自然科学版)(2020年6期)2020-01-11
小学生学习指导(中年级)(2019年10期)2019-10-08
数学学习与研究(2018年5期)2018-03-28
读与写·教育教学版(2017年10期)2017-11-10
作文与考试·小学高年级版(2016年7期)2016-05-14
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
