
基于GAPSO算法的NPC逆变器SHEPWM控制方法的优化
2021-01-04 00:59沈显庆马志鹏
黑龙江科技大学学报 2020年6期
沈显庆,马志鹏
(黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022)
0 引 言
PWM调制技术是多电平逆变器中的一项关键技术,与SPWM调制和SVPWM调制相比,SHEPWM调制具有开关频率低、输出波形质量高等优点[1]。在SHEPWM技术中,开关角均由非线性方程组求得,因此,该调制技术的关键在于对建立的方程组进行求解。传统数值方法,如牛顿迭代法[2]、同伦算法[3]、Walsh函数法[4],原理简单、收敛速度快,但对初值选取依赖性较强,不合适的初值可能会使算法不收敛。目前,研究者们多将智能算法应用于SHEPWM非线性方程组的求解中。王群京等[5]采用标准遗传算法对方程组进行求解,得到不同调制比下的开关角度轨迹,但算法后期容易出现早熟现象。赵义武等[6]利用蚁群算法对目标函数进行优化,求解效果较好,但在算法进化前期由于信息素匮乏会导致求解效率较低。针对上述算法存在的问题,笔者采用一种改进的混合粒子群算法(GAPSO)优化计算SHEPWM的非线性方程组,使开关角度更易收敛于最优解,通过Matlab/Simulink仿真验证该算法求解结果的有效性。
1 NPC逆变器拓扑结构及工作原理
三电平NPC逆变器如图1所示。图中,Ud为直流侧电压;C1、C2为中点电容;D1、D2为箝位二极管;Sa1、Sa2、Sa3、Sa4为开关功率器件。
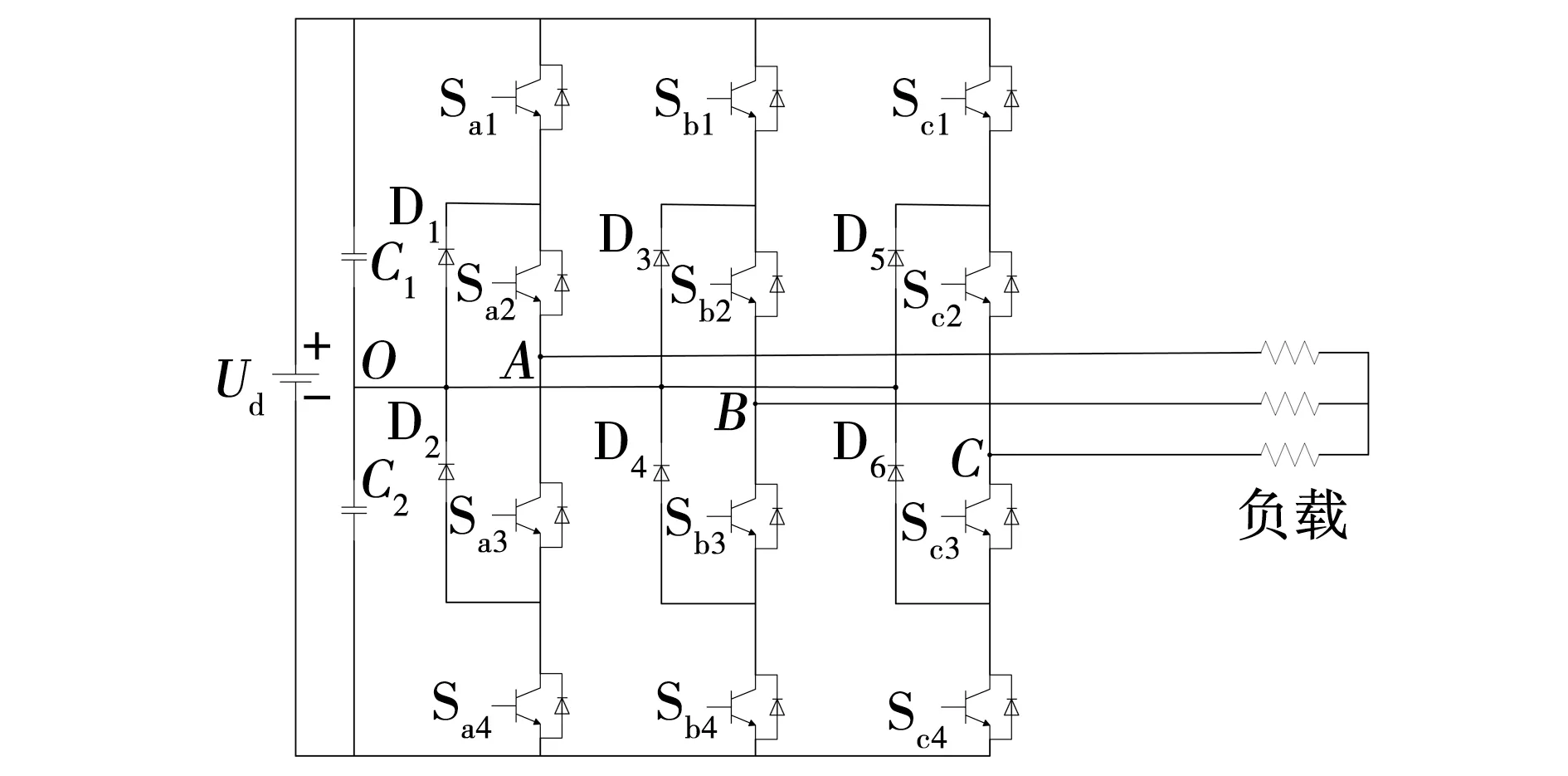
图1 三电平NPC逆变器拓扑结构Fig. 1 Three-level NPC inverter topology
逆变器的每相桥臂由4个开关器件串联而成,具有单个器件所承受的电压低、对开关频率约束小、输出的波形质量好等优点[7]。通过控制相邻的2个开关器件导通或关断,从而得到不同的输出电压。以A相桥臂的4个开关器件为例,定义0为开关器件的截止状态,1为开关器件的导通状态。当Sa1、Sa2为1,Sa3、Sa4为0时,输出电压为Udc/2,称为P状态;当Sa2、Sa3为1,Sa1、Sa4为0时,输出电压为0,称为O状态;当Sa3、Sa4为1,Sa1、Sa2为0时,输出电压为-Udc/2,称为N状态。开关器件导通状态与逆变器输出电压关系如表1所示。
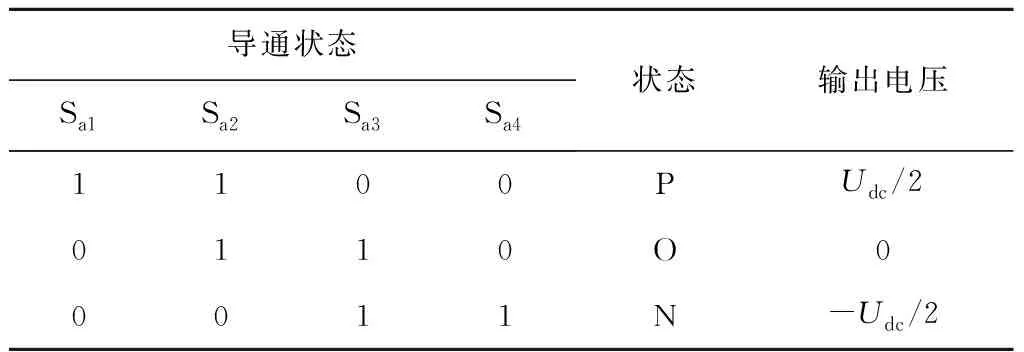
表1 NPC逆变器输出电压及开关器件导通状态
2 三电平SHEPWM方程组的建立
图2为三电平逆变器相电压输出波形,波形满足1/4周期对称,同时考虑到三相系统之间的对称性,线电压中不含有3及3的倍数次谐波,文中只考虑消除5,7,…,6k-1,6k+1次谐波。
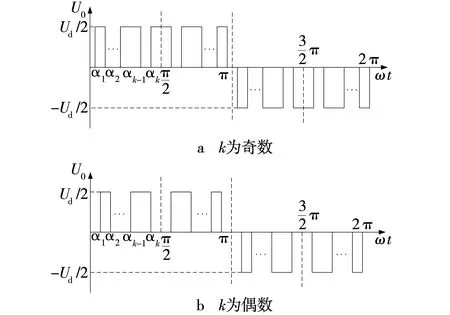
图2 三电平逆变器SHEPWM相电压波形Fig. 2 Phase voltage waveform of 3-level inverter
根据Dirichlet定理,可将相电压波形展开成Fourier级数的形式为
由于相电压波形的奇对称,则有
An=0,
(1)
式中:Umn——n次谐波电压幅值;
n——谐波次数;
N—— 1/4周期内开关角的个数;
Ud——直流侧电压;
ω——基波角频率;
αk——第k个开关角,且开关角应满足条件, 0<α1<α2<…<αN<π/2。
由式(1)可得,只要准确求出开关角的大小就可使Umn=0,即可有选择地消除某些低次谐波。文中以3个开关角为例,主要消除输出电压中的5、7次谐波。令式(1)中的B1=m,B5=0,B7=0,即可在满足基波幅值的情况下,消除目标谐波。建立适应度函数方程为
(2)
式中:Um1——基波电压幅值;
Um5、Um7——5、7次谐波电压幅值;
m——调制比,m=2Um1/Ud。
3 SHEPWM方程组的求解
3.1 PSO算法权重系数的改进
对标准的PSO算法[8],假设在一个群体中由n个粒子组成,表示为X={x1,x2,…,xn},每个粒子由一个D维向量xi={xi1,xi2…,xiD}表示。在算法寻优的过程中,粒子通过跟踪个体最优位置和全局最优位置来更新自己,从而在搜索空间中向更好的位置移动,粒子速度及位置更新公式为
式中:t——当前迭代次数;
w——惯性权重;
c1,c2——学习因子;
r1,r2——(0,1)之间的随机数;
gt——第t次迭代的全局最优位置。
根据SHEPWM方程组的特点,在算法的前中期,惯性权重w应该较大,保证搜索的全局性,在算法迭代寻优的后期,采用数值较小的w值,保证算法在该粒子处搜索的准确性[9]。因此,文中w的取值采用随着迭代次数递减的方式,公式为
式中:wmin、wmax——w的最小值及最大值;
T——最大迭代次数。
3.2 开关角度的求解
在GAPSO算法中[10],选择操作主要是对种群中的粒子进行一定的筛选,根据适应度函数的值进行排序,从种群中挑选出一些优质个体进行后续迭代。在选择操作的基础上,对这些被挑选出来的粒子以一定的概率pc进行两两交叉,替换种群中的劣质个体,保证种群规模的前后一致。新粒子的位置及速度更新公式为
式中:ε1、ε2——(0,1)之间的随机数;


在此基础上,以变异概率pm对种群中的个体一个或多个维数赋以初值,从而避免算法搜索后期种群多样性的丧失。改进的混合粒子群算法(GAPSO)计算步骤如图3所示。
以3个开关角的消谐方程为例,将改进的GAPSO算法用于SHEPWM方程组的求解,将式(2)变换为
cosα1-cosα2+cosα3-πm/4=η1,
cos 5α1-cos 5α2+cos 5α3=η2,
cos 7α1-cos 7α2+cos 7α3=η3。
由此,建立算法的适应度函数:
min:g(α)=|η1|+|η2|+|η3|,
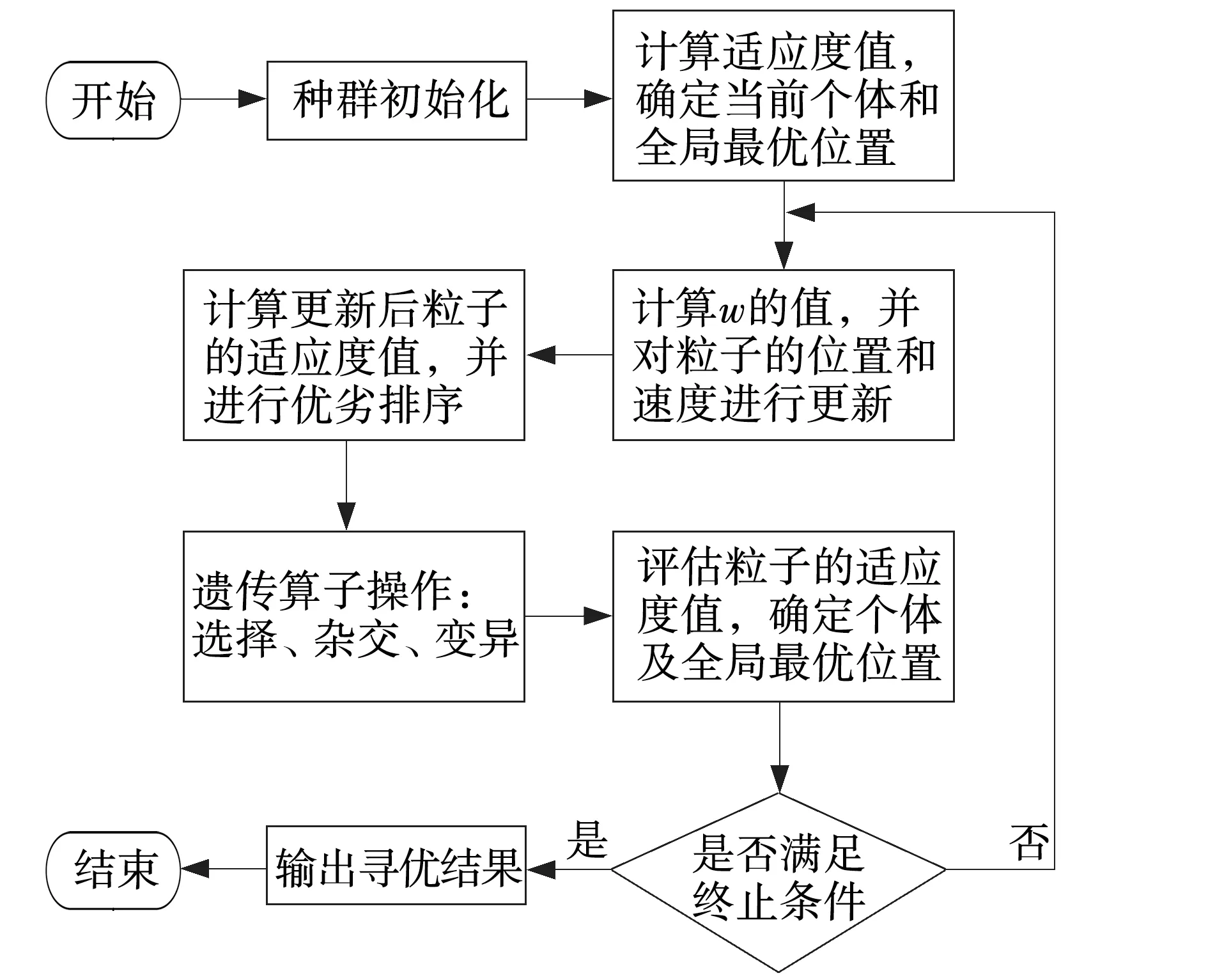
图3 改进的GAPSO算法计算流程Fig. 3 Improved GAPSO algorithm calculation process
经过上述变换,最小多目标问题被转化为一个单目标问题,当g(α)取最小值时,η1、η2、η3均为最小,此时,所求出的开关角度即为方程组的解。
4 系统仿真
改进的GAPSO算法具体参数设置为:粒子群数量n1=200,最大迭代次数T=100,wmin=0.2,wmax=0.7;c1=c2=1.494 45,pc=0.8,pm=0.2。在Matlab 2016a[11]内编写GAPSO角度计算程序,计算得到m=0.7时的三个开关角度为47.856 3°、58.175 2°、66.356 1°及m=0.8时的开关角度为37.072 6°、44.036 8°、56.783 0°。图4为GAPSO算法进化代数与目标函数适应度值的关系,可以明显看出文中所提的改进GAPSO算法收敛速度快,搜寻能力强,在很短的时间内即可计算出最优解,且不容易陷入局部最优。为了验证改进的GAPSO算法求解非线性方程组的有效性,在Matlab/Simulink环境下搭建三电平NPC逆变器仿真系统进行仿真分析。将所计算的开关角度代入仿真模型中,其中直流电压源为2 000 V,输出频率为50 Hz,图5~6为m=0.7时的相、线电压波形及谐波频谱分析,相电压、线电压THD分别为75.75%和47.53%。图7~8为m=0.8时的相、线电压波形及谐波频谱分析,相电压、线电压THD分别为63.64%和41.52%。

图4 适应度进化曲线Fig. 4 Fitness evolution curve

图5 m=0.7时仿真波形Fig. 5 Simulation waveform of m=0.7

图6 m=0.7时仿真频谱Fig. 6 Simulation spectrum of m=0.7

图7 m=0.8时仿真波形Fig. 7 Simulation waveform of m=0.8

图8 m=0.8时仿真频谱Fig. 8 Simulation spectrum of m=0.8
由图5~8可见,逆变器输出的相电压中5、7次谐波含量基本为0,线电压中3的倍数次谐波基本消除,由此证明所提算法计算出开关角度的正确性。
5 结束语
利用GAPSO算法求解了三电平NPC逆变器SHEPWM的非线性方程组,将遗传算法与粒子群算法进行有机融合,克服了传统数值算法对初值要求高、求解精度差及标准PSO算法易早熟等问题,具有搜索时间短,收敛速度快,求解精度高等优点。仿真结果验证了该算法求解SHEPWM方程组的准确性,为SHEPWM方程组的求解提供了一种新的方法。
猜你喜欢
中学生数理化·七年级数学人教版(2022年5期)2022-06-05
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
语数外学习·初中版(2020年5期)2020-09-10
课程教育研究·学法教法研究(2018年20期)2018-08-11
电子制作(2017年10期)2017-04-18
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
