
单行玉米电动播种控制系统的设计
2021-01-04 07:37:12匡丽红赵雪张博石磊王淞张蕊
黑龙江八一农垦大学学报 2020年6期
匡丽红,赵雪,张博,石磊,王淞,张蕊
(1.黑龙江八一农垦大学工程学院,大庆 163319;2.中国农业大学信息与电气工程学院)
在我国南方,由于受地理环境、耕地条件等因素影响,农户耕地分散,作业面积较小,通常采用小型拖拉机牵引单行播种机具进行播种生产作业,造成压实面积过大;受作业面积影响,机车作业行动不便;缺乏有效的监测手段,易造成漏播、断条等情况;同时,由于传统播种机地轮与排种器之间通过链条进行动力传递[1],作业中的地轮打滑会严重影响播种均匀性[2]。因此,针对上述情况,研究一种具有小型牵引机构、自动监测工况的全电驱动播种机具具有重要意义。
目前,国外在电动播种机方面的研究比较成熟,已商品化,可以实现电动播种、施肥和工作状态监测等功能,功能齐全,作业效果良好,作业灵活性和效率高。日本研究了一种排种电控系统[3],针对圆盘式排种器,按照落种周期设计驱动电路,驱动电磁调节装置控制种子的运动,驱动周期和落种时间要保持一致,才能保证正常播种作业,适合于低速播种作业。日本还研究了依据地轮转速实时调节播种量的自动控制系统[4],通过速度传感器实时获取作业速度,按照输入作业参数、获取的作业速度,调整排种轴转速,通过试验数据对比发现,在播种株距变异系数方面,该系统优于传统地轮驱动的排种器。美国Precision Planting 公司以SeedSense 20/20 为核心,开发了变量播种控制系统[5-6],每个播种单体可独立工作,由SeedSense 向单体控制模块下发作业速度、播种量等信息,单体控制模块根据指令信息计算电机理论转速,并将转速信息发送至电机驱动模块,电机驱动模块根据反馈速度,准确调节电机转速,功能完善,价格较高。美国Trimble 公司研发的Field-IQ 变量播种控制系统[7],使用控制器通过CAN 总线发送播种转速指令,Rawson 播种单体驱动模块接收指令后,控制排种电机实施播种作业。
国内在播种状态监测方面的研究比较成熟,多数采用的是光电监测的方法[8-16],而在电动播种作业方面的研究起步较晚,目前多处于实验室研究阶段。李剑峰等[17]研究的小麦播种机变量控制系统能够完成变量播种,可以实现数据的采集与处理,完成排种器转速的控制,在转速控制精度上有待提高。张国梁等[18]研究了播种机变量控制系统,电脑通过RS232通信将播种参数传送给单片机,并通过反射式光电传感器检测播种机的作业速度,单片机根据播种参数与作业速度调节步进电机转速,实现变量播种。娄秀华[19]研制的一种以单片机为核心的播种智能控制器,提前给单片机输入地块需要的播量,控制器计算出排种器转速与播种机前进速度之间的函数关系式,根据测量的机车作业速度对步进电机的转速进行实时调节,减少了地轮打滑对播种质量的影响,提高了播种均匀性。赵雪等[20]研究的气吸式玉米播种智能电控系统,以工控机为核心,单片机为控制器,根据机车速度实时调节排种直流电机,实现变量播种。
综上所述,国外的电动播种控制系统技术成熟,但引进成本高,而且适用性上有偏差,国内目前有少量引进,但功能不能全部适用,性价比降低。国内的研究主要是针对由机车牵引的多行作业机具的自动化问题,对于南方小地块的单行作业机具应用,具有局限性,而且牵引机车的作业不便,未能解决。因此,课题组提出了一种交流电机作为机具行进动力源、直流电机驱动排种器的单行电动播种机的方案,通过试验证明,其作业效果较好。
1 单行电动播种机的总体结构及原理
单行电动播种机结构及实物如图1 所示。系统包括了机具部分和动力源部分。机具部分有开沟器、覆土器、行走轮、排种器、液肥罐以及播种监控系统等;动力源部分包括牵引电机、卷盘、行走导轨及电机控制系统等。动力源部分安装在作业地块两端的工字钢上,可以移动,由两端的牵引电机作为机具动力源,一放一收,通过卷盘和钢丝牵引机具移动,整个机具四角下安装有万向轮,为保证其行走轨迹不发生偏移,要求释放钢丝电机和收卷钢丝电机要同步,保持机具前后受到一定的牵引力,才能保证其直线行走轨迹。根据南方作业地块特点,钢丝长度定为100 m,采用单相交流电机带动卷盘,卷盘通过钢丝牵引机具做直线运动,卷盘收放速度为12 m·min-1,作业速度小于1 km·h-1。
排种器选用的是毛刷式大豆、玉米排种器,排种器受同轴直流电机旋转驱动,播种控制系统通过一个专用的测速轮采集机具作业速度,根据机具速度调节直流电机转速,使播种株距达到要求,每次到达地头,机具需要横向移动一条作业带时,测速轮抬起锁住,以免误认为是机具处于作业状态。

图1 单行电动播种机结构框图及机具实物图Fig.1 The structure diagram of single-row motor-driven seeder
2 电动播种监控系统结构设计
电动播种监控系统结构如图2 所示。系统包括微处理器、作业速度传感器、作业工况传感器、作物类型选择输入、步进电机控制电路、声光报警电路等。
控制单片机根据作业速度传感器或者GPS 模块获取的机具速度,通过驱动电路实时调节排种电机转速,在播种起始和结束时电机转速变化较大,正常播种时电机转速变化较小,同时,监测单片机实时监视导种管中种子下落情况,一旦发生异常,立刻驱动声光报警电路,同时通知控制单片机停止播种作业。
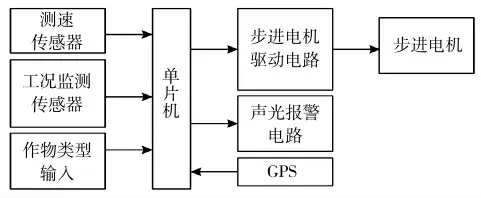
图2 电动播种监控系统结构图Fig.2 The schematic diagram of motor-driven seeder control system
根据排种器选择合适的电机是保证播种合格率的重要因素。结合系统重量、体积、成本等因素考虑,系统选用了哈尔滨双福农机公司生产的毛刷式排种器,玉米盘型孔数为15,省去了风机的成本,降低整机重量和功耗。为确定排种器转动扭矩,将排种器中充满实验玉米种子,采用精度为0.1 N.m、量程为0~135 N.m 的开拓扭力测试仪进行测量,得到扭矩为4.5 N.m,考虑到排种过程可能会存在卡种等情况,驱动扭矩至少为转动扭矩的2 倍。根据需求和现场条件,作业速度需控制在1 km·h-1以下,机架下四个万向轮轮径为200 mm,株距为250 mm,根据表达式(1),计算最大转速为4.45 rpm。

式中,n 为转速(rpm),v 为机具前进速度(km·h-1),k 为排种盘的型孔数,s 为株距(m)。该排种器要求驱动电机应具有低转速、大扭矩的特点。如果采用普通的775 型直流减速电机,虽然功耗低,但是在低速下电机抖动,并且一旦卡种,电机就会损坏。因此,系统选用了57 步进电机配二级减速器的方法,输出扭矩最大可以达到30 N.m,步距角1.8 °,电源范围24~48 VDC,实验测试,低速下电机无抖动。
准确获得机具的实时速度,根据行进速度及时调节排种电机的转速,是保证合格粒距的重要前提。因此,设计了两套测速装置。一是预留的GPS 模块接口,在没有差分基站和低速作业的情况下,GPS 模块输出速度波动大,无法作为电机调速依据,如果当地具备了差分基站,可以利用GPS 模块获取准确的作业速度和位置信息,用于统计作业量等信息。二是在机具上装配了一个可伸缩的测速胶轮,直径200 mm,可根据机具运动方向调节其升降,通过安装在测速轮上的光电码盘,码元数为200,实时采集机具前进速度;微处理器根据获得的脉冲数,由表达式(2)计算出机具速度:

式中,v 为机具作业速度m·s-1,N 为编码器输出的脉冲数,d 为测速地轮直径mm,K 为光电码盘码元数,t 为采集周期s。由于测速地轮存在打滑现象,根据现场土质,将表达式(2)计算的速度乘以打滑率0.9,该系数可根据土质条件进行修改。微处理器根据作业速度计算出当前排种器的理论转速,调节步进脉冲,使排种器达到理论转速,保证播种株距。
由于播种作物可以是玉米和大豆,通过两位开关作为作物类型输入选择,以便于根据播种株距计算电机转速。为防止出现漏播情况,采用工况监测传感器,实时监测导种筒中种子流运动情况,一旦发生漏播,驱动警示灯,发出声光报警信息。避免电线过长、干扰机械运动,播种监控系统电源采用36 V 100 AH的锂电池供电,充满电为42 V,完全能够满足一天的作业用电量。
3 电动播种监控系统电路设计
电动播种监控系统是由三个微处理器单元构成的集散控制系统,微处理器均采用STC15W401,具有一个串口、两个定时器,程序存储器1KB,SRAM 容量256 B,2.4~5.5 V 的宽电源电压范围,在蓄电池供电情况下,也能稳定工作。微处理器1 的部分电路如图3 所示,主要完成与GPS 模块的通信,GPS 模块采用的是GS-216,每秒传输一次位置坐标和速度信息,价格低,但是精度不高,尤其是速度采集误差较大,需要建立差分基站,以提高定位和速度精度,微处理器1 通过MAX232 与GPS 模块通信,获取速度信息后,通过SPI 接口,将速度信息传输给微处理器2 和微处理器3。
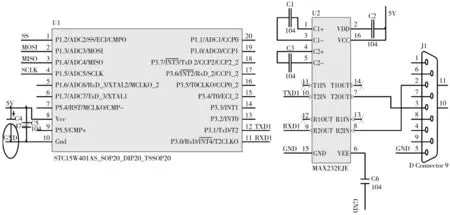
图3 微处理器1 与GPS 模块接口电路Fig.3 The interface circuit of MCU 1# with GPS module
微处理器2 为整个系统的核心,它完成采集机具速度、排种器速度控制和电池电压监测等功能,部分电路如图4 所示。由于试验现场无差分基站,GPS模块采集的速度误差相对较大,因此,利用安装在测速轮上的光电码盘测量机具速度,利用单片机的两个16 位定时器,累计相邻两个脉冲间隔时间,根据表达式(2),计算机具行进速度。根据机具速度、作物类型和株距要求,使用表达式(1)计算得到电机理论转速,利用1 个16 位定时器和1 个I/O 口产生所需步进脉冲,控制排种器的转速,使其达到播种株距要求。由于播种控制系统采用锂电池供电,需要保证锂电池不能亏电而影响播种作业,同时避免其过放电,缩短电池寿命,因此,采用DSC_CN302 监测锂电池电压,CN302 是一款可调整迟滞的低功耗电压检测集成电路,如果FTH 管脚电压低于CN302 下行阈值,在短暂延时(典型值13 μs)后,5 脚输出低电平,CN302 特别适合检测单节或多节锂离子电池;通过其外围的三个电阻匹配,构成其上行和下行阈值,即可完成锂电池电压监测。在系统设计中,当电池电压低于31 V 时,5 脚输出低电平,引起微处理器2 产生外部中断,微处理器2 点亮电量指示灯,提示操作人员注意。

图4 微处理器2 与电池电量监测电路图Fig.4 The circuit of MCU 2# and battery level monitor
微处理器3 主要完成播种状况监测功能,当收到机具工作信息时,开始循环检测种管中种子流情况,一旦发生堵塞或者排空,立即启动24 V 高分贝旋转式声光报警器工作,并将故障信息发送给微处理器2。
4 电动播种监控系统软件流程
电动播种监控系统微处理器2 的软件流程如图5 所示。系统开机后,单片机上电初始化,读取播种作物类型,检测机具是否运动,如果未做移动,则处于待机状态,如果机具移动,则判定为机具开始工作,获取机具速度信息,并将开始工作信息发送给微处理器3,使其开始检测种管中种子流情况,根据获取的速度信息和作物类型信息,确定排种器当前的理论转速,输出转速调节脉冲,一旦微处理器3 监测到播种异常信息,立即向微处理器2 发出报警信息,并发出声光报警,微处理器2 停止电机工作,直到机具再次移动,恢复正常工作状态。三个微处理器之间采用SPI 通信,利用中断方式工作,提高每个单片机的工作效率。电池电量监测采用的是外部中断方式,一旦电池电压低于31 V,在微处理器2 的外部中断引脚产生低电平,触发中断,在中断处理中,点亮低电量指示灯。
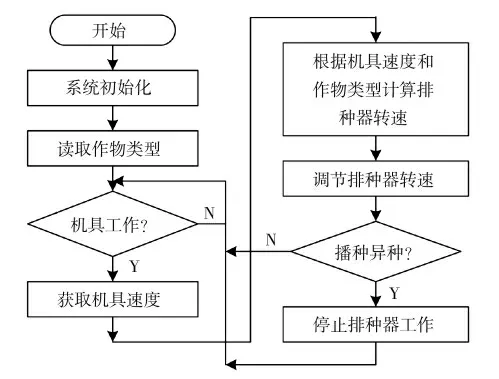
图5 微处理器2 软件流程Fig.5 The software flowchart of MCU 2#
5 系统试验
系统性能试验于2018 年7 月在黑龙江八一农垦大学土槽实验室进行,2019 年5 月于湛江市热带植物研究所完成了田间试验。试验作物为千粒质量为313.8 g 的德美亚1 号玉米种子,株距设定为250 mm,测速轮直径200 mm,作业距离为50 m,作业速度小于1 km·h-1,主要进行了株距合格率、重播率和漏播率测试,检验电动播种是否满足国标要求,株距检验使用量程30 cm、精度1 mm 的钢尺,人工数种校对。进行了20 组实验,重复5 次。统计试验结果如表1 所示。

表1 播种均匀性测试Table 1 Uniformity test of the seeder
国家在《JB/T10293-2001 单粒(精密)播种机技术条件》对精密播种机要求的作业指标中规定:当株距≥20 cm 时,精密播种机作业性能指标应达到粒距合格指数≥80%,重播指数≤15%,漏播指数≤8%。表1 中结果表明,单行电动播种机各项指标符合上述规定,试验中重播指数较高的原因是:种子筛选不严格,导致小粒种子在同穴重复下落。漏播指数较高的原因是:在部分地块不平整,机具速度有突变,排种电机转速调节延迟,导致出现漏播。另外,机具在启动和停止阶段,速度变化较为剧烈,造成排种器速度不能及时跟随机具速度,从而引起作业地块两端的株距合格率降低。因此,针对速度突变情况,如何调节电机转速仍需深入研究。
作业状况监测试验,通过人为设置排种管堵塞或排空故障,检查响应时间和误报警情况。进行了10组试验,分别设置在作业地块的起始段、中间段和停止段,观察其报警正确率、报警响应时间、排种电机是否停转、是否正常启动工作等。通过试验得到,误报警率达到2%,报警响应时间<0.3 s,每次故障时排种电机都能正常停止,当机具再次移动时,能够正常转动。误报警率高的原因在于:毛刷排种器经过了改造,转动不顺畅,导致电机偶尔出现脉动,对种管监测探头形成干扰,需要提高其抗干扰能力。
6 结论
针对南方小地块作业的特点,设计了一种全电驱动的单行玉米播种机,由交流电机作为动力源,带动排种单体移动,采用直流电机作为排种器动力源,去除链传动,减轻作业负荷,对种管工作状态进行实施监测,避免出现漏播、断条情况。实验结果表明,播种株距合格指数>95.3%,重播指数<3%,漏播指数<2.7%,满足国标要求,误报警率2%,响应时间<0.3 s。该套机具及控制系统能够大大减轻小地块作业对机车的要求,减少人力投入,提高作业效率。当然,系统在随动控制和误报警率方面,有待于进一步提高。
猜你喜欢
农业与技术(2022年9期)2022-05-17 07:45:48
新疆农机化(2022年1期)2022-03-02 09:44:18
农机质量与监督(2021年5期)2021-07-02 09:26:20
今日农业(2020年22期)2020-12-14 16:45:58
时代农机(2019年5期)2019-02-11 10:52:34
农业工程学报(2018年24期)2019-01-14 10:42:32
农民致富之友(2017年12期)2018-01-31 19:54:33
学苑创造·B版(2015年12期)2016-06-23 09:36:36
雷锋(2016年4期)2016-05-30 02:09:48
学习月刊(2015年10期)2015-07-09 03:35:12
