
基于箭载GNSS+BDS 定位的测控设备自引导技术
2020-12-31 01:47:16周辉峰姜忠武廖清森
导弹与航天运载技术 2020年6期
周辉峰,姜忠武,廖清森
(西昌卫星发射中心,西昌,615000)
0 引 言
测控系统主要负责火箭及卫星的轨道测量、图像及遥测监视、遥控操作、数据注入、飞行控制等,是载人航天八大系统之一,是探月工程五大系统之一,是航天工程不可或缺的重要组成部分。航天测控站的任务是直接对航天器进行跟踪测量、遥测、遥控和通信等,它将接收到的测量、遥测信息传送给航天控制中心,根据航天控制中心的指示与航天器通信,并配合控制中心完成对航天器的控制。陆地测控站通常由跟踪测量设备、遥测设备、遥控设备、通信设备、监控显示设备等组成。随着无线电技术的发展,测控设备也在不断发展,独立的跟踪测量设备、遥测设备和遥控设备已逐步被共用一路载波信道的统一测控系统所代替[1,2]。
中国已初步具备天基测控能力,已基本建成天地一体、设备齐全、任务多样的航天测控网。中国航天测控网正在逐步实现由陆基向天基、由地球空间测控向深空测控的拓展[3]。未来中国将完善现有航天测控系统,建设运行第2 代中继卫星系统,构建安全可靠、响应迅速、接入灵活、运行高效、服务广泛的天地一体化航天测控体系[4]。但目前中国航天测控网依然存在测控盲区,不能做到所有任务航区全覆盖。已经覆盖的区域属于交棒接力式覆盖,冗余备份手段不足,一旦个别站点设备故障将严重影响区域测控能力。对于航天发射主动段测控而言,中国主要发射中心已基本建立“程引+数引+自跟踪”的多体制跟踪测量策略。程引模式只在目标按照预定路线飞行时可用,一旦目标偏离路线、飞行超前或滞后都将导致丢失目标;数引模式则利用正常自跟踪的测控站的综合数据(含遥测数据、雷达定位数据、惯导数据),进行飞行目标的实时定位,再将定位结果用于引导其他测控站点地面设备跟踪目标,要求所依赖站点自跟踪稳定、各测控站点与中心数据链路畅通且时间高度统一。数据、链路、时统任一出现问题将导致数引模式失效。
由于航天器造价高昂,飞行试验次数受限,飞行数据十分珍贵,每次飞行试验都要求测控系统完整可靠地获取飞行试验数据。因此,提升地面测控设备适应能力和抗干扰能力,进一步提高全航区测控数据收发可靠性是十分必要的。随着多星座卫星导航技术的成熟和发展,目前中国航天任务基本都搭载了全球卫星导航系统(Global Navigation Satellite System,GNSS)+北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)授时定位接收机。本文从测控站点自身出发,研究测控站点地面设备基于箭载GNSS+BDS定位的自引导、互引导技术的可行性。该方法的成功应用,将为各测控站点地面设备的跟踪测量开辟一道新的引导途径。即使中心数引链路中断,测站基于自身的跟踪测量,从下行遥测数据中实时解调出箭载GNSS+BDS 接收机定位数据,进行插值外推,并转换为测站跟踪引导弹道,应用于引导测控天线对准目标。还可以将此引导弹道引导同站其他设备跟踪目标,提高了测站地面设备跟踪测量的稳定性和可靠性。
1 算法设计
1.1 现有跟踪捕获模式
中国发射场主要采用“程引+数引+自跟踪”的多体制的跟踪测量策略,“初始捕获”和“丢失重捕”均按“数引→程引”的优先级进行捕获,流程如图1 所示。具备条件的测站可以先用一个大波束角的引导天线锁定跟踪目标,再用以引导小波束角天线跟踪目标。

图1 现有跟踪模式流程Fig.1 Flow Chart of Existing Tracking Mode
程序引导模式只能在目标按照预定路线飞行时(偏离不超过天线波束角),测站利用伺服控制系统事先装填理论弹道引导天线运行,当飞行目标进入天线波束角范围且满足自跟踪条件(接收机锁定、自动增益控制电压、角误差电压等满足要求),则切换为自跟踪模式。一旦目标飞行偏离理论路线、飞行超前或滞后都将可能导致目标丢失,无法进行跟踪测量。
中心数据引导模式则利用前站已正常自跟踪设备的综合数据(含遥测数据、雷达定位数据、惯导数据),进行飞行目标的实时定位解算,再将定位结果插值拟合后用于引导后站(他站)地面设备跟踪目标,后站(他站)满足自跟踪条件后切换为自跟踪模式。中心数据引导模式遇到地震、泥石流、山体滑坡等自然灾害和战争时,该引导模式的通信链路保障环节容易遭到破坏。
1.2 改进后跟踪捕获模式
随着北斗卫星导航系统应用的成熟和发展,结合中国航区设备实际情况,引入基于箭载GNSS+BDS 定位的遥测地面设备自引导模式,改进和丰富了原有测控设备的跟踪模式。改进后跟踪策略流程如图2 所示。在初始捕获阶段增加了同站互引导模式,初始捕获时按“数引→程引→同站引导”的优先顺序进行捕获。当目标丢失时,增加了同站自引导和GNSS+BDS 引导模式,丢失重捕时按“数引→同站引导→GNSS+BDS引导→程引”的优先顺序进行捕获,也可根据使用者不同习惯调整跟踪捕获的优先级。

图2 改进后初始捕获及丢失重捕流程Fig.2 Improved Flow Chart of Initial Acquisition and Lost Retrieval
具有两套以上设备的测控站点才能够使用同站引导模式,由于遥测设备波束角大于雷达波束角,一般而言,遥测设备先于雷达设备发现目标。先发现并能够跟踪目标的设备可以将实时角度信息用于引导同站设备跟踪捕获目标。在飞行目标偏离理论路线且中心数引模式失效时,该捕获模式便成为唯一的引导模式。
1.3 GNSS+BDS 引导算法设计
GNSS+BDS 引导采用基于箭载GNSS+BDS 定位的自引导技术,设计算法流程如图3 所示。地面设备必须先通过中心数据引导/程序引导/同站引导捕获目标,接收遥测下行数据并解调;将插播在遥测帧中的GNSS+BDS 定位数据送外测终端进行实时解算;然后将已获取的目标弹道信息进行拟合外推;扣除传输、处理延时后,转换为测站实时引导弹道,用于引导天线对准目标。满足跟踪条件后可切换为自跟踪,自引导弹道实时更新,直至任务弧段结束。该算法不仅实现了“遥测接收-弹道解算-引导天线-自跟踪”的跟踪策略,还实现了“遥测接收-弹道解算-引导天线”和“遥测接收-弹道解算-自跟踪”的实时闭环处理,确保跟踪的连续性、稳定性和可靠性。对于时延计算而言,箭上遥测系统处理GNSS+BDS 定位信息、空间传输时延、地面遥测解算、外测终端解算的时延可以通过解算GNSS+BDS 定位时刻的相对时与地面解算结束时刻相对时刻做差求取。弹道主动段常用拟合法有基于最优样条节点主动段弹道估计法和分段最小二乘拟合法[5,6],本文采用多项式最小二乘法拟合,先拟合后外推。然后经时延修正后用于引导天线跟踪目标。

图3 GNSS+BDS 引导原理流程Fig.3 GNSS + BDS Guidance Principle
2 试验验证
针对上述设计的跟踪捕获策略与基于GNSS+BDS定位的引导算法,结合中心某测控设备,开展了试验验证。以某次飞行任务箭载GNSS+BDS 定位数据为例,坐标为地心坐标系,数据刷新频率10 Hz。拟合外推算法采用2 次或3 次多项式最小二乘法拟合,拟合刷新频率与定位解算频率10 Hz 一致。经测算空间传输、各级处理时延约100 ms。初始拟合取50 个点(5 s)定位数据,根据时延估算因外推至当前时刻后200 ms,并根据实际需要选择外推的步数。当定位数据实时更新时,进行移步拟合实时更新当前弹道。图4 为基于箭载GNSS+BDS 定位解算拟合外推50 步(5 s)的引导弹道与实际跟踪弹道对比情况,试验结果表明,外推弹道制作的引导弹道与实际跟踪弹道是基本吻合的,能够满足引导天线对准目标,实现实时接收遥测信息。当目标丢失后也能够通过此方法实现目标的丢失重捕,该跟踪策略和引导算法是可行的。

图4 拟合外推引导弹道与实际跟踪弹道对比Fig.4 Comparison of Fitting & Extrapolating Guided-trajectory with Actual Tracking Trajectory
相对时135 s 中心数引跟踪目标,同时外测终端正常解调GNSS+BDS 接收机定位数据,165 s 转自跟踪。135~165 s 天线采用中心数字接收机自引导数据与中心自引导数是一致。辅助证明了本文算法的正确性。误差曲线如图5 所示。从统计结果看,方位角误差统计标准差较大,正负最大偏离均比俯仰大,说明偏离抖动较大,285 s 左右抖动明显,是自跟踪过航捷点(飞行轨道在地面的投影离测量设备最近点,此时仰角最高)时天线抖动引起,而非GNSS+BDS 引导算法引起。而自跟踪俯仰角比理论俯仰角存在约0.18°偏差,可能原因是大地测量值偏差、天线标定标校偏差、天线方向图偏差、坐标系转换等原因造成,该偏误差可以通过提高大地测量精度、提高天线标定标校精度和改善天线方向图等手段修正。误差统计分析见表1 所示。
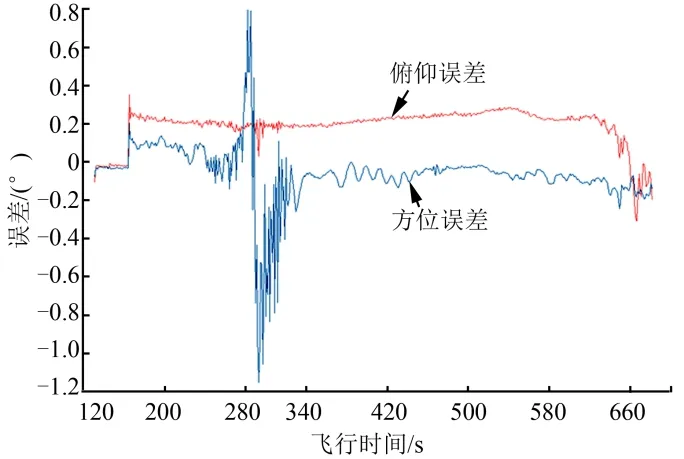
图5 拟合外推引导弹道相对实际跟踪弹道的误差分析Fig.5 Error Analysis of Fitting & Extrapolating Guided-trajectory Relative to Actual Tracking Trajectory
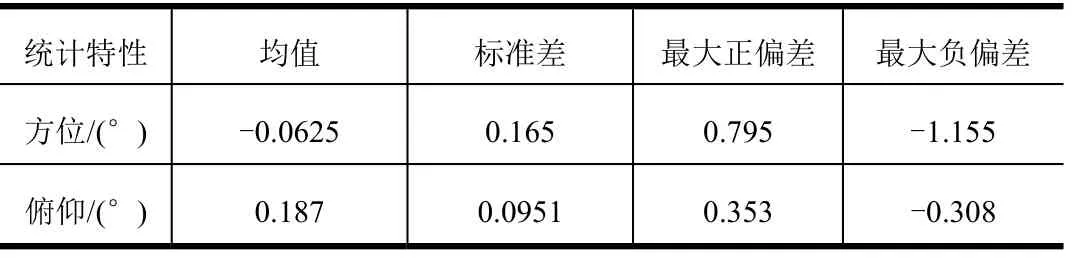
表1 GNSS+BDS 引导弹道相对自跟踪误差统计Tab.1 Error Statistics of GNSS+BDS Guided-trajectory Relative to Self-tracking
实践表明,有5 s(50 步)以上实时定位信息后,该算法可以实时引导天线对准目标,完成引导跟踪测量任务,同时可以将该引导弹道用于引导同站其他设备跟踪目标。对于地面测量设备而言,只要接收到5 s(50 步)以上定位信息,即使之后伺服解角误差链路出现故障(如:解角误差1 kHz 信号输出异常),在不依赖中心数字引导的情况下,测量站还可以通过此方法完成跟踪测量任务。需要外推多步时,采用50 点二次多项式最小二乘法拟合外推50 步或100 点3 次多项式最小二乘法拟合外推100 步有较好的鲁棒性,误差在天线跟踪波束角范围内。随着外推步数越多,误差越大,超出波束角后可能会导致目标丢失。
3 结束语
随着中国现代化建设不断深入,空间科学应用需求井喷式发展,各类型航天发射数量逐年上升。在轨航天器数量不断增加但相应测控资源有限,实现快速响应、全面保障主动段航区测控与航天器在轨管控的实现,成为测控领域面临的新考验和亟待解决的新课题。此次研究从航天测控站自身出发,研究了测控地面设备基于箭载GNSS+BDS 定位的自引导技术和同站互引导技术的可行性,试验表明该方法是完全可行的,能够为地面各测控设备的跟踪测量开辟一条新的引导与互引导途径,提高测站地面设备跟踪测量的自适应性、抗破坏性、稳定性和可靠性。
猜你喜欢
中国新通信(2022年9期)2022-06-10 02:31:54
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
环球时报(2019-09-23)2019-09-23 06:15:25
电子制作(2019年11期)2019-07-04 00:34:40
电子制作(2019年7期)2019-04-25 13:17:48
电子测试(2018年13期)2018-09-26 03:30:00
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
制导与引信(2016年3期)2016-03-20 16:02:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
河南科技(2014年16期)2014-02-27 14:13:30
