
海水总管螺栓组拆卸作业人因仿真与分析①
2020-12-28 08:16:34王春雨胡小才蒋祖华
佳木斯大学学报(自然科学版) 2020年6期
王春雨, 杨 振, 胡小才, 蒋祖华
(1.上海交通大学机械与动力工程学院,上海 200240;2.上海外高桥造船有限公司,上海 200137)
0 引 言
在船舶的日常运营中,海水总管因为海水的腐蚀会发生渗漏,需要以五年为周期定期更换[1]。随着计算机技术和虚拟样机仿真技术的发展,允许在虚拟环境下对作业做事前模拟,而无需建造物理样机或等待真实作业发生[2-3]。因此,船舶维修方希望在真实的更换作业实施之前,采用仿真的方法,对现有管系维修手册上的作业流程进行分析并改进,并对作业空间加以改善。海水总管螺栓组的拆卸是整个更换作业的第一个步骤,通过与工程师交流和作业现场观察,发现可能影响拆卸作业的工作流程和空间上的潜在问题:1)单对法兰盘上一组螺栓数量可观,拆卸一段海水总管至少要对两对法兰进行操作,整个过程中存在大量重复动作;2)前方有管路支架上有管路遮挡,可能影响螺栓拆除作业;3)海水总管与后方隔断墙之间空间狭窄,可能会限制维修人员的姿势,导致可视性和可达性不能满足作业需求并且易引起作业者劳损。
针对上述三个潜在的问题,运用CATIAV5软件,搭建了海水总管拆卸作业的虚拟场景,分析了拆卸作业的流程并进行了工作时间改善。运用人因工程学原理[4]的分析,改善了机舱内拆卸现场作业空间的遮挡问题。使用快速上肢评估(RULA)对作业者的作业姿势进行分析打分,对潜在易伤要点给出警示和改进建议。
1 人员作业的人因分析方法
1.1 MOD法
预定时间标准法(Predetermined Time Standard,PTS)是制定时间标准以预测工作时间的技术。它不是通过直接观察和测定,而是利用预先为各种动作制定的时间标准来确定进行各种操作所需要的时间。MOD法是一种常用的PTS方法,根据操作者的动作部位、动作距离、工作负荷等参数,借助作业对象模型、工作环境布置、操作指南等信息辅助,通过分析计算可以确定标准化的操作流程并预测完成作业所需时间[5]。
使用MOD法对作业流程进行分析,需要将作业动作分解为由21种人体基本动作单元组成的动作序列。MOD法中21种人体基本动作符号与动作时间关联,动作时间是MOD的整数倍,而MOD选取正常人的最低级、最快速、能耗最少的一次无负荷手指动作(移动2.5cm)耗时作为单位时间。因此在分析动作序列的基础上,实践中根据操作者的差异性调整MOD值即可快速确定当前作业的工作时间。文中分析取1MOD=0.129s作为基本动作时间[6]。
1.2 快速上肢评估RULA
在狭窄的空间中进行长时间、大负荷的手工作业,易引发肌肉骨骼损伤(MSD,musculoskeletal disorders)[7]。通过有效的人因学评估来降低工作过程中MSDs的发生风险,是目前工作MSDs预防的一个主流研究方向,其中快速上肢评估法(RULA,RapidUpperLimbAssessment)已被证明是一种有效且可靠的评估分析工具[8]。RULA主要针对某一作业姿势下的受力状态和肌肉施力状态进行分析,以分数评估上肢肌肉受伤的风险。
RULA将人体动作组成要素分为两大部分:手腕手臂部分、颈部以下部分,两部分评分方法如下[9]:
1) 手腕手臂动作评分:手臂的动作要素可分解为上臂偏离中心位置角度与下臂偏离中心位置角度,手腕的动作要素是手腕偏离中心位置角度和是否扭转。首先,根据作业姿势得出上臂、下臂和手腕评分,上臂评分、下臂评分、手腕评分和手腕扭转评分综合得到手腕手臂部分基础评分。然后,考虑负荷状态,负荷不到2 kg 忽略,2-10 kg 间歇动作记1 分/静态维持或者多次重复记2 分,10 kg以上或者数次重复记3 分。 考虑肌肉施力状态,动作静态持续时间超过1 min 或者每分钟重复超过4 次,肌肉施力程度记1 分。将手腕和手臂姿势、负荷状态和肌肉施力程度三项评分相加即可得到手腕手臂动作评分。
2) 颈部以下动作评分:颈部以下动作分解为颈部、躯干、腿部三个组成。颈部的动作要素是颈部偏离中心位置角度,颈部前倾10°到竖直状态记1分,前倾10°到20°记2分,前倾大于20°记3分,后仰记4分。躯干的动作要素是躯干偏离中心位置的角度,竖直站立至后仰10°或有靠背坐姿后仰20°记1分,竖直站立至前倾20°或无靠背坐姿后仰20°记2 分,前倾20°至60°记3分,前倾大于60°记4分。腿部动作要素是双腿受力平衡性,双腿受力平衡记1 分,不平衡记2 分。颈部、躯干和腿部评分综合得颈部以下部分基础评分。然后,考虑负荷状态,负荷不到2 kg 忽略,2-10 kg 间歇动作记1 分/静态维持或者多次重复记2 分,10 kg以上或者数次重复记3 分。 考虑肌肉施力状态,动作静态持续时间超过1 min 或者每分钟重复超过4 次,肌肉施力程度记1 分。将颈部以下部分基础评分,负荷状态和肌肉施力程度三项评分相加即为颈部以下部分动作评分。
将两大部分的评分汇总,从表1中可确定当前作业姿势的最终评分。CATIA中集成了基于人体模型的RULA自动计算功能,并且可以展示上臂、下臂、手腕、颈部、躯干五部位的详细评分,1~2分为可接受的,3~4分为需进一步调查,5~6分为需进一步调查并尽快改善,7分为需立即改善的。采用RULA对作业姿势做静态分析。
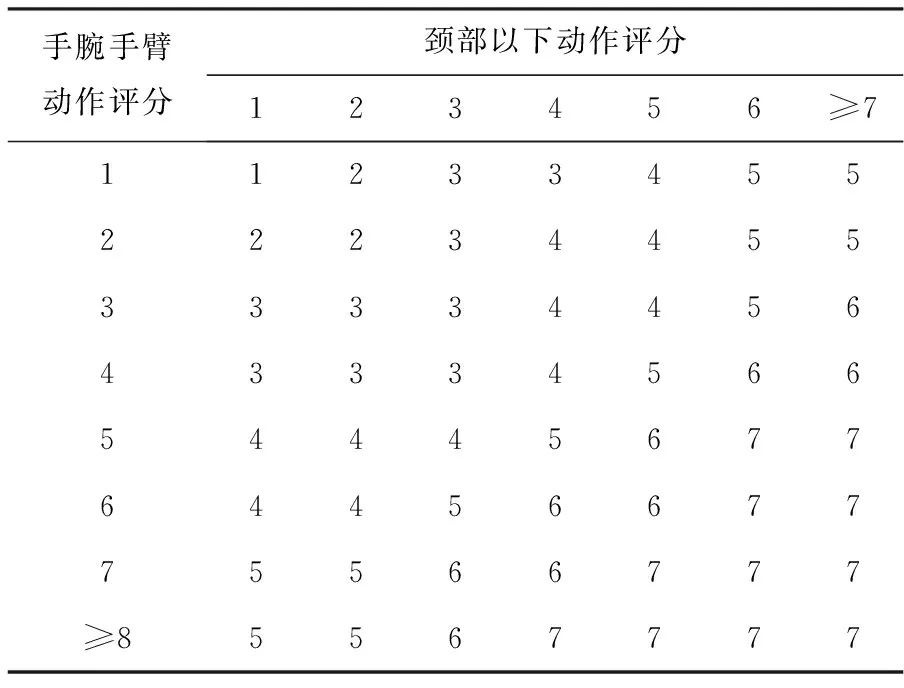
表1 作业姿势最终评分表
2 基于CATIA的虚拟作业场景搭建
使用CATIA中的HumanBuilder功能,创建维修人员的全尺寸模型,生成具有精确结构层次的数字人体模型,其中人体尺寸数据取自《中国成年人人体尺寸》(GB10000-88)。考虑到标准的采样数据年代较早,因此采用较大百分位范围(第95百分位)的人体尺寸值。
CATIA中人机工程学模块和机械设计功能无缝集成,可以直接导入使用CATIA设计的三维模型搭建作业场景。且这些读入的模型和源文件之间是强关联的[10],对模型源文件的修改可以自动同步到场景模型中。搭建完成的场景三维渲染如图1、2所示。
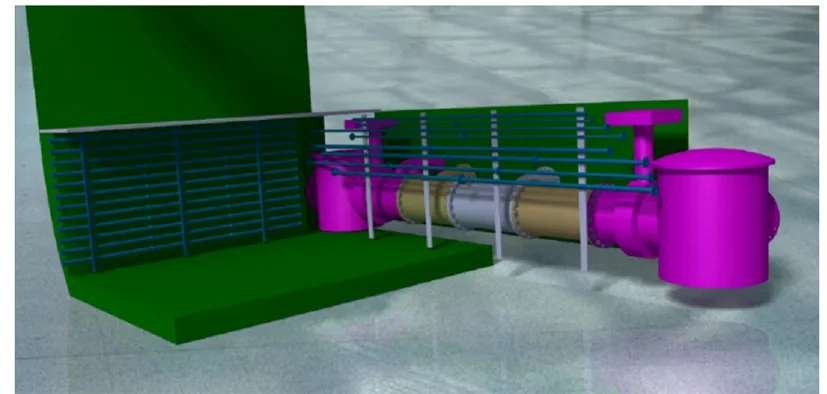
图1 船舱底层海水总管及周边管系场景模型渲染图
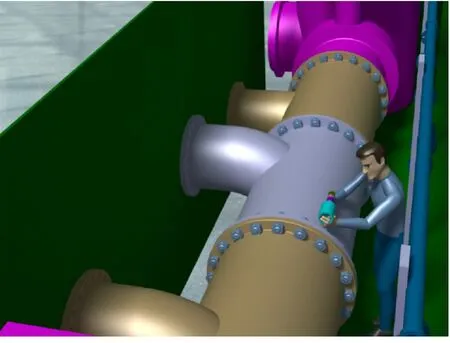
图2 海水总管法兰部分视图
3 拆卸作业的人因仿真与分析
3.1 工作时间分析
根据管系拆卸维修手册要求,海水管系结构图,按海水总管拆卸步骤确定拆卸操作,螺栓组拆卸工序的基本步骤过程如下:
(1)移动到作业平面;
(2)握取电动扳手;
(3)定位螺栓;
(4)使用电动工具;
(5)去除工具和螺钉;
(6)放置螺钉和螺帽;
(7)放下电动扳手;
重复(1)~(7)。
海水总管间法兰通过20对螺栓相连,围绕法兰一周,不同位置的螺栓操作条件差别很大,应区别分析。因此,将拆卸螺栓的情景划分为4个操作空间,对应的操作对象(螺栓)所处位置如图3所示

图3 操作空间的划分
拆卸1号空间位置的螺栓仿真截图如图4所示。

图4 拆卸螺栓组的仿真模型
在实例中,电动扳手工具重2.2kg,考虑重量因素L1×2;单对螺栓重量3.9kg,考虑重量因素L1,,放宽设定为20%。以1号操作空间为例,改进前的单次拆卸螺栓的双手MOD法分析如表2。

表2 单次拆卸螺栓MOD法分析表
由上表分析可知,一般维修人员采用正常速度进行拆卸螺栓的动作时间值为59MOD,即59×0.129=7.61s,考虑放宽20%为t1=9.13s。考虑到每次操作使用反射动作的次数略有不同,上述分析值也会有所差别,但浮动值一般不超过0.5s。
维修人员在不同操作空间之间切换,需要移动站位和更改姿势,但不同的操作空间对操作时间的影响不大,因此只考虑移动站位和更改姿势带来的时间增加。这种切换耗时受空间限制影响显著,因此不适用MOD法,取四个操作空间切换时间的均值=60s。
综上,可求得单组(20对)螺栓拆卸作业耗时(T)为T=9.13×20+60×4=422.6s
3.2 工作时间改善
通过观察,可以发现以上的作业流程存在两个问题:
1)电动扳手重量较重,给每一步动作都增加了重量因素L1*2;
2)单组螺栓有20对,考虑整合整组螺栓的操作动作,减少一些往复运动。
因此进行如下改进:
1)使用“伸缩绳”将电动扳手悬挂起来,抵消电动扳手带来的重量因素L1*2,并减少了电动扳手和对象螺栓之间的距离,可以降低单次拆卸螺栓抓取电动扳手的大臂动作M4为小臂动作M3,如图5所示;
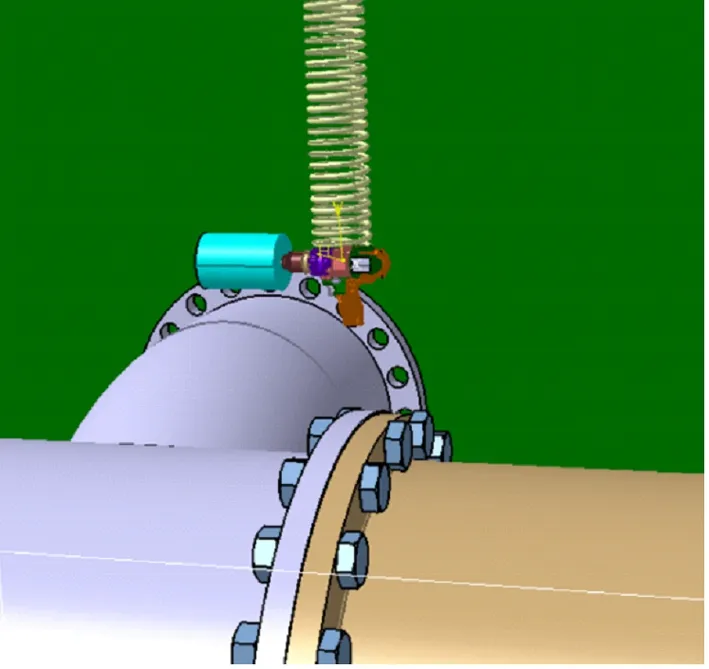
图5 使用伸缩绳悬挂的电动扳手
2)整合整组螺栓的操作动作,将“单次拆卸螺栓”作业分解为“拧松螺栓”和“拧下螺栓”两步子作业,然后重复两步子作业,两步新动作的MOD分析如表3所示,如此可减少拆卸整组螺栓移动电动扳手的总次数。
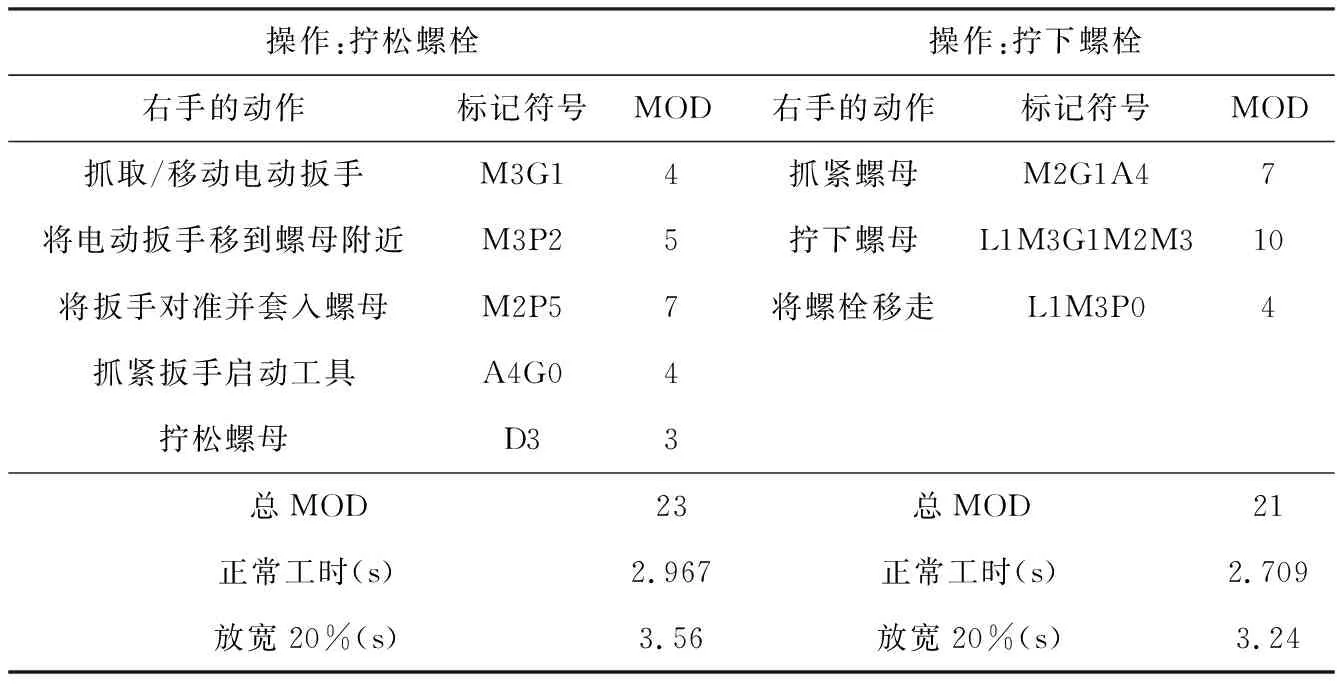
表3 “拧松螺栓”和“拧下螺栓”MOD法分析表

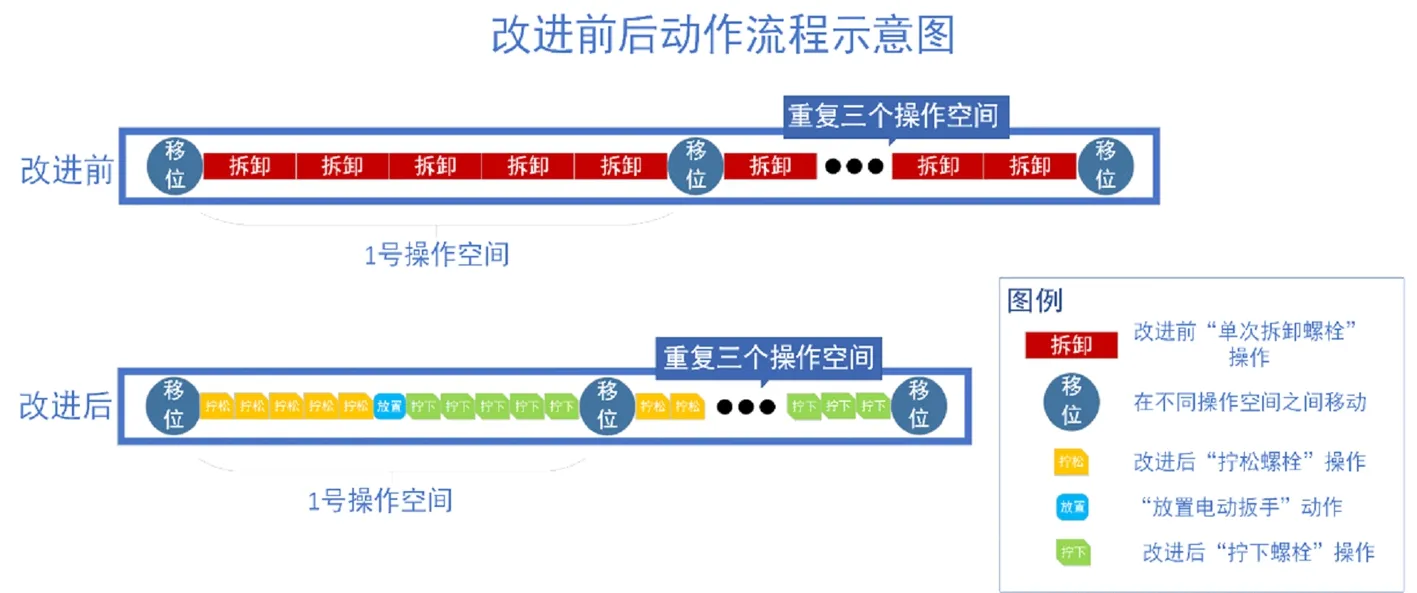
图6 改进前后动作流程示意图
3.3 作业空间仿真与分析
由于海水总管所处机舱底层,油路、水路、冷却水路的管路集中于此,因此在海水总管周边形成了遮挡,维修人员可活动空间有限。为保障作业,需要拆除一些遮挡物、改进工具布置,创造合适的作业空间,使维修人员可以对操作对象进行良好观察和充分活动,称之为“可达性分析”。广义上的“可达”包括三个方面的内容:
1) 实体可达,维修人员应能够接触目标件。
2) 视觉可达,维修人员应能够看得到目标件以及自己的操作动作,如在目视情况下进行的视觉定位动作、连续动作、逐次动作和反复动作等。
3) 作业空间可达,维修人员应能够有足够的操作空间,根据人体尺寸设计,作业空间应大于人体最小作业空间。
CATIAV5的人机工程学模块中提供了实时生成虚拟人员视野的功能,用于判断维修部位是否视觉可达;提供了可达包络(Reach Envelope)的生成功能,用球状面描述了人体上肢能触及到的范围,其中包含了碰撞检测算法,可以精确判断维修部位是否实体可达。
图7所示是四种操作空间维修人员姿态的可视性分析,在现行作业姿势下,视角可以覆盖操作工具和操作对象,不构成障碍。

图7 四种操作空间的可视性分析
图8所示是四种操作空间维修人员姿态的可达性,其中1号、2号、4号操作空间维修工人活动空间充足,站立原点四周空间大于人体最小作业空间,不会对拆卸作业构成障碍。3号操作空间在满足实体可达及视觉可达条件时,没有合理的姿势能够保证作业空间可达,分析后认为,可考虑拆除作业位置背侧的一根管路支架,以改善作业空间大于人体最小作业空间。

图8 四种操作空间的可达性
3.4 作业姿势的RULA评估
海水总管周边空间狭窄,如图9,限制了作业者的作业姿势,维修手持电动扳手对螺栓组进行操作时,身体部位疲劳积累易导致劳损和效率降低。采用RULA对作业姿势进行评估,预测作业中易发生MSD的脆弱点,针对性地提出预防措施。
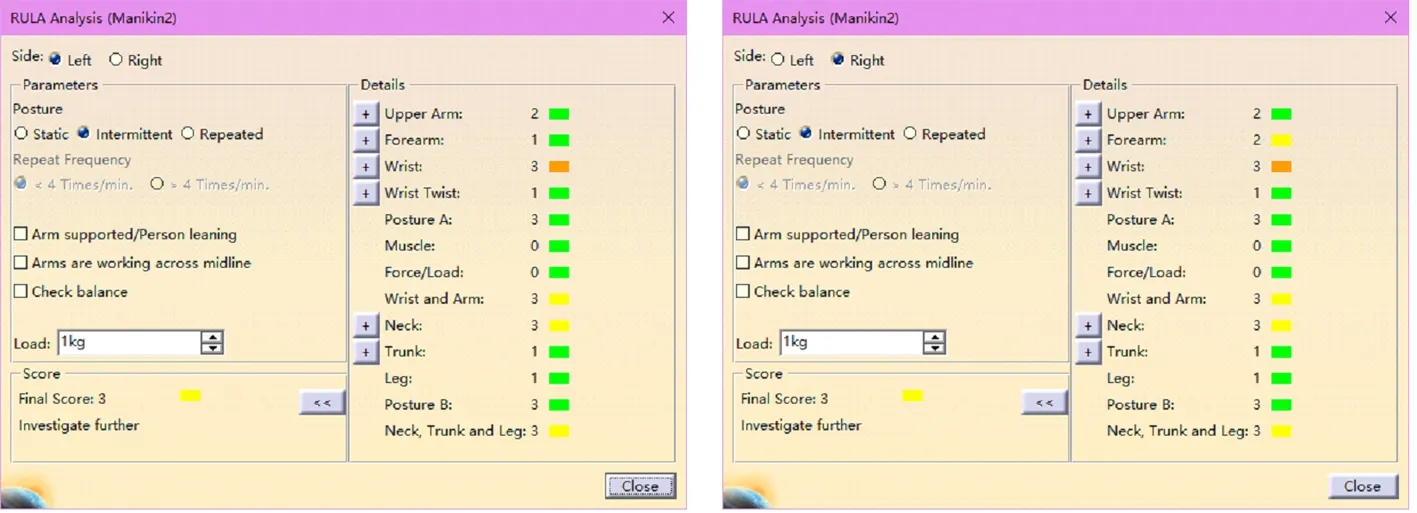
图9 应用预防措施后预测RULA分析结果
拆卸螺栓组的作业姿势可以归纳为站立拆卸和蹲坐拆卸两种。图10-a是维修人员站立拆卸姿势的复现,图10-b和图10-c分别是左右侧肢体RULA分析。由评估可知,维修人员两侧肢体中手腕评分均较高,说明握持电动扳手操作时手腕是脆弱点,应避免手腕扭转姿势并使用保护器具;右前臂和肌肉负荷状态是上肢部分另两处风险较高的部分,主要因素为电动扳手的重量带来的负荷,采用3.2节中的方法将电动扳手悬挂以分散重量影响,可以将肌肉负荷降低一个档次;颈部以下部分评估需要注意,主要因素为该姿势长久静态保持导致的脆弱,缩短工作时间配合作业间休息可有效降低该部位的风险。采取上述改进后,再次进行RULA分析,如图11,显著降低了各部位的评估,可以证明预防性措施的有效性。
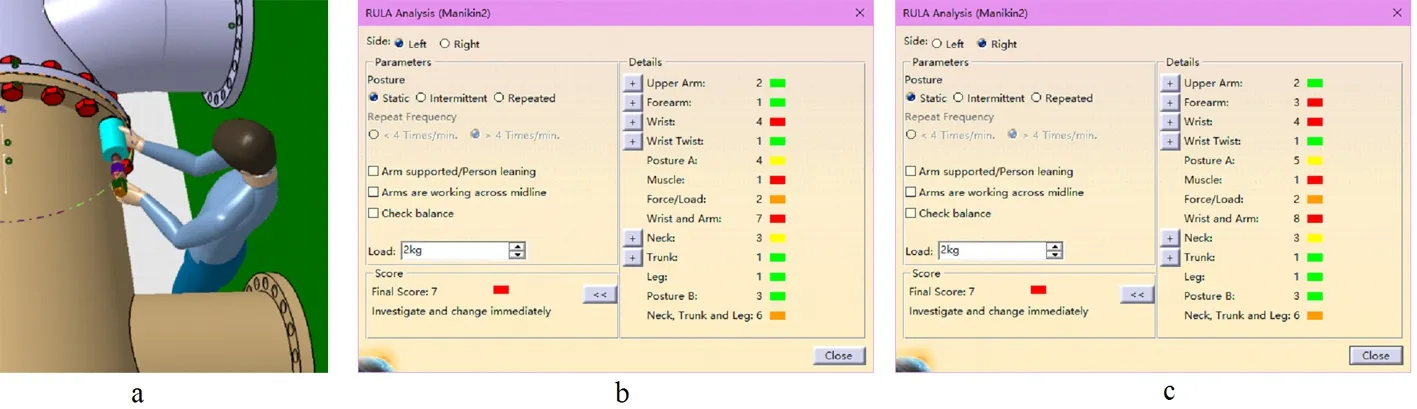
图10 站立拆卸作业姿势与左右侧RULA分析

图11 海水总管与海水滤器连接法兰
图12-a是维修人员蹲坐拆卸姿势的复现,图12-b和图12-c分别是左右侧肢体RULA分析。由评估可知,蹲坐姿势时的维修人员主要的易伤风险来自于肌肉负荷,因此将电动扳手的重量分散配合作业间休息可有效削减MSD的风险,如图13,肌肉负荷减轻后可以看到该作业姿势下的脆弱显著下降。
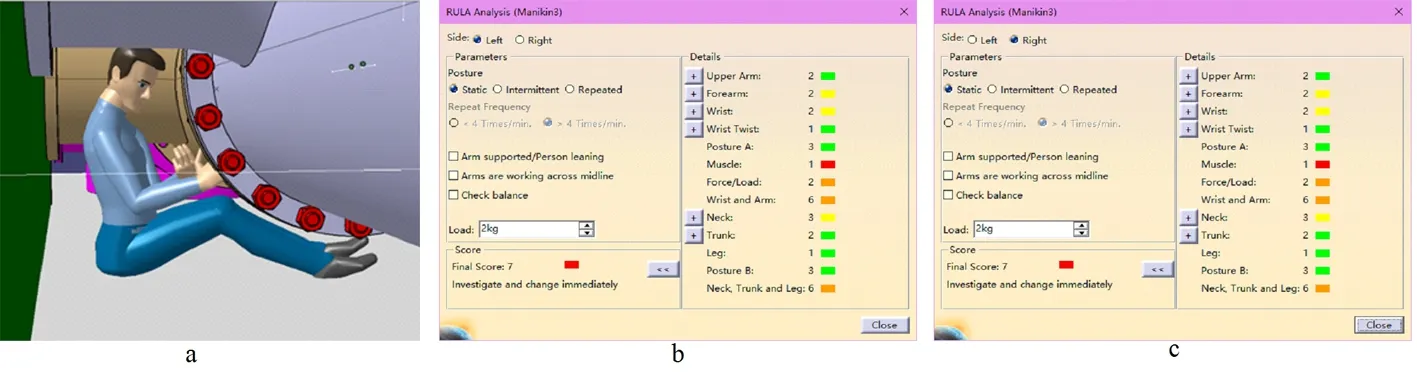
图12 蹲坐拆卸作业姿势与左右侧RULA分析
图13 应用改进措施后预测RULA分析结果
4 结 语
针对海水总管螺栓组拆卸作业这一狭窄空间内的人工作业,首先通过对作业空间及空间内设备的尺寸进行测量,利用CATIA软件搭建了工作场景的虚拟模型。在工作场景模型里加入人体模型,并据此对待分析作业进行工作时间分析、作业空间仿真和作业姿势评估,最终经优化与验证后可形成标准工作流程、结构障碍物设计修正建议、易伤风险警示与预防等成果。上述工作可总结为拆卸作业人因工程学仿真和分析的一般流程,如图14。

图14 拆卸作业人因工程学仿真分析的一般流程
应用人因工程学的原理和方法,结合工程师访谈和管系维修手册,对现行拆卸作业流程的工作时间进行了分析,采用悬挂工具和重新排定动作顺序的方法,改善了作业时间。并利用CATIAV5软件的人机工程学模块,分析了作业空间的视觉可达性和空间可达性,评估了站立拆卸和蹲坐拆卸两种作业姿势。由于人体尺寸的国家标准推出年代较早,依据该尺寸建立的人体模型只能做预测性的分析,如果在下一步的应用中加入对目标维修人员群体人体尺寸的考虑,可以提供更加准确地改进建议。
猜你喜欢
青少年科技博览(中学版)(2023年9期)2023-11-30 03:42:26
文苑(2020年5期)2020-06-16 03:18:10
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:38
趣味(数学)(2019年12期)2019-04-13 00:28:58
中国生殖健康(2019年10期)2019-01-07 01:20:58
儿童故事画报·发现号趣味百科(2017年10期)2018-03-13 19:01:16
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
军营文化天地(2017年7期)2017-09-25 07:43:48
作文周刊·小学一年级版(2016年39期)2017-03-03 12:42:14
军事文摘(2016年16期)2016-09-13 06:02:51
