
基于BP 神经网络和遗传算法的永磁同步电机控制系统*
2020-12-25 08:41李昌奇何志琴郑自伟
微处理机 2020年6期
李昌奇,何志琴,郑自伟
(1.贵州大学电气工程学院,贵阳550025;2.贵州航天林泉电机有限公司,贵阳550025)
1 引 言
随着电力电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机以其功率密度大、效率高、控制性能优越及抗过载能力强等优点,被广泛应用于数控机床、汽车、航天航海等领域[1]。
在永磁同步电机控制系统中,经典的PID 算法简单实用,Ziegler 和Nichols 提出了一种著名的PID控制器整定的经验公式[2],但响应曲线有一定程度的超调量。非线性控制中的自适应控制效果较好,不过算法相对较为复杂[3]。滑模控制具有快速性、强鲁棒性等优点,但必须要解决系统的抖振问题[4]。传统的控制方法已经难以满足系统响应速度快、鲁棒性好等控制要求,智能控制以其独特的优点被广泛应用于电机驱动中,采用智能算法优化PI 控制器参数的永磁同步电机控制策略,可以达到控制系统的要求,具有一定的可行性和实际意义。
基于现有研究背景,在此提出一种利用BP 神经网络和遗传算法对PI 控制器参数进行离线整定的方法,解决永磁同步电机转速PI 控制器参数难整定而导致的电机控制效果不理想的问题,其所做的优化可改善永磁同步电机的动静态性能。首先将永磁同步电机实验数据作为数据样本来训练BP 神经网络,然后用遗传算法寻优出速度PI 控制器的最优参数值,最后在MATLAB/Simulink 软件仿真验证方法的可行性。
2 永磁同步电机的数学模型
控制对象的数学模型应能够反应被控系统的静态特性,才能准确建立永磁同步电机数学模型[5]。首先做如下假设:①忽略电机铁心的磁饱和,不计铁心的涡流损耗与磁滞损耗,永磁体电导率为0;②三相绕组对称在空间中互差,标准Y 型连接,忽略空间谐波。在同步旋转坐标系d-q 下建立数学模型,定子电压方程如下:

定子磁链方程为:

电磁转矩方程为:

转速PI 控制器传递函数为:

式(1)~(3)中,ud、uq分别表示定子电压在 d-q 轴的分量,id、iq分别表示定子电流在d-q 轴的分量,R是定子电阻,ψd、ψq表示定子磁链在 d-q 的分量,ωe表示机械角速度,Ld、Lq分别表示在d-q 轴上的电感,ωf是永磁体的磁链,Pn是电机的极对数。
3 永磁同步电机矢量控制
基于BP 神经网络和遗传算法的永磁同步电机矢量控制如图1 所示。采用矢量速度、电流双闭环对永磁同步电机进行控制。内环为电流环,作用是限制最大电流,使电机在起动过程中有足够大的加速转矩,保证电机的稳定运行。外环为速度环,作用是增强电机的抗负载扰动能力和抑制转速的波动,保证系统的静态和动态性能。速度环与电流环之间实现串级联结,速度环的输出作为电流控制器的电流给定信号,电流环的输出电压作为驱动电路的PWM 控制电压[6]。由于控制系统的动态响应性能与速度环密切相关,因此采用BP 神经网络和遗传算法进行速度PI 控制器参数的离线整定优化,从而实现永磁同步电机转速控制的平稳性和快速性。
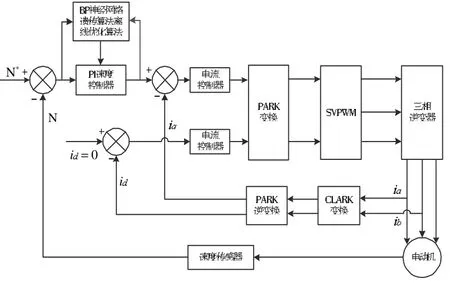
图1 永磁同步电机矢量控制框图
4 控制器参数整定
4.1 BP 神经网络建模
PID 控制在线性系统控制领域中技术成熟,应用普遍,但在高度耦合、复杂的非线性系统中有很大局限性[7]。BP 神经网络是一种多层前馈网络,其主要特点是信号前向传递,误差反向传播[8]。不仅有很强的非线性拟合能力,而且能以任意精度逼近任意非线性连续函数,解决复杂的非线性系统控制问题。
BP 神经网络被用来拟合PI 控制器的比例、积分参数和相应的永磁同步电机动态响应性能之间的非线性关系,永磁同步电机的动态响应性能用阶跃响应的最大峰值M0和上升时间Ts来衡量。那么需要建立一个两输入两输出的BP 神经网络模型,经过实验确定隐含层层数为7,因此BP 神经网络模型结构为2-7-2,其拓扑结构如图2 所示。

图2 BP 神经网络结构
BP 神经网络模型初始权值参数均采用[-0.5,0.5]区间上的随机数,输入层为等值模型,其输出层等于输入层,如下式:

BP 神经网络隐含层的输入输出分别为:
BP 神经网络输出层的输入输出分别为:
BP 神经网络是个不断学习的过程,需要考察学习次数的性能指标函数,此处性能指标函数为:

按照梯度下降法修正网络的权系数,即E(k)对加权系数的负梯度方向搜索调整,并附加一个使搜索快速收敛全局极小的惯性项,则有:

式中,η 为学习速率,α 为惯性系数。
4.2 遗传算法控制器参数优化
遗传算法(Genetic Algorithms)是 1962 年由美国Michigan 大学Holland 教授提出的模拟自然界遗传机制和生物进化论而成的一种并行随机搜索最优化方法[9]。因为遗传算法独特的工作原理,使它能够在复杂空间进行全局优化搜索,可适用于求解非线性、不可导系统的最优解[10]。
BP 神经网络联合遗传算法进行最佳PI 控制器参数寻优流程如图3 所示。

图3 BP 神经网络和遗传算法极值寻优流程图
染色体的适应度函数为:

首先遗传算法随机产生一个种群,调用建立的BP 神经网络模型计算群体中的个体适应度,Kp和Ki是 BP 神经网络模型的输入,M0和 Ts是 BP 神经网络的输出,将M0和Ts作为遗传算法适应度函数的参数。然后根据计算个体适应度值进行个体的选择,交叉和变异操作,使适应度值好的个体被保留,适应度差的个体被淘汰,不断循环直到满足遗传算法的终止条件。当系统的最大峰值和上升时间最小时,适应度函数最小时所对应的PI 控制器参数Kp和Ki为最优。
5 实验仿真与分析
为验证所提出方法,运用MATLAB/Simulink 软件对控制系统进行建模与仿真。经系统实验得到60组输入输出数据,用来进行BP 神经网络的训练和测试,BP 神经网络结构为2-7-2,学习速率η=0.1,惯性系数α=0.8,迭代1000 次,误差精度为0.00001。表1 为BP 神经网络训练预测输出与实际输出的实验对比。图4 为最大峰值M0的变化曲线图。图5 为上升时间Ts的变化曲线图。由图表可知,训练得到的BP 神经网络模型具有较高预测精度,其10 组预测输出和实际输出相差不大,最大误差不超过5%。
遗传算法初始种群随机产生,种群的大小为30,染色体采用实数编码,由Kp和Ki组成,采用轮盘赌法进行选择操作, 交叉操作比例为0.4,采用实数交叉法,变异操作比例为0.2,迭代次数是100 次,30 对 Kp、Ki随机确定,取值范围为(0.005~1)和(0~10)之间。图6 为适应度曲线变化曲线,经过100 次迭代,适应度函数值f 取得最小值为10658,对应最优PI 控制器参数为Kp=0.42,Ki=2.163。

表1 BP 神经网络训练输出数据表

图4 最大峰值变化图
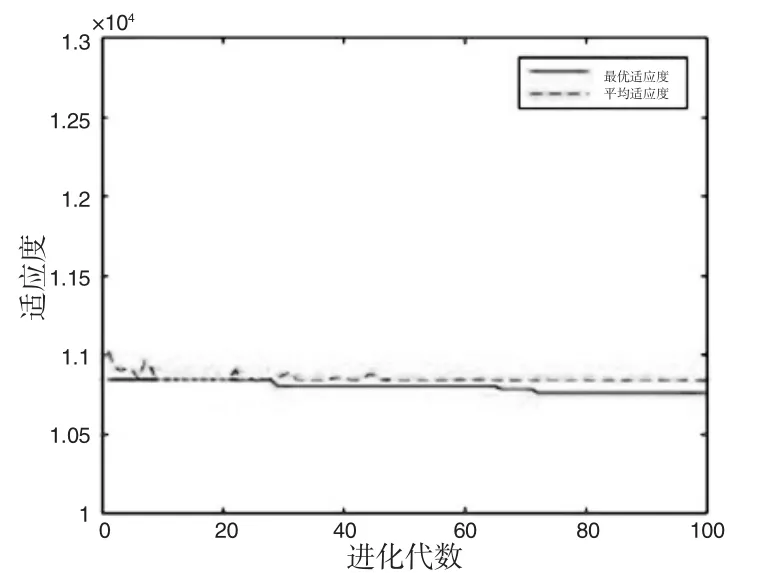
图6 适应度函数变化图
系统仿真的永磁同步电机参数以实际所用电机参数为参考,具体为:相间电阻Rs=0.396 Ω,相间电感 L=0.000708 H,阻尼系数 B=0.0008 N·m·s,磁极对数 P=2,给定磁链 ψf=0.0368 Wb,转动惯量 J=3×10-5kg·m2。永磁控制系统空载运行,参考转速n =10000 r/min,仿真时间 t=0.4s。表 2 为传统 PID 算法参数值和本方法得到的参数值对比,永磁同步电机转速仿真曲线如图7 所示。

表2 PI 控制器参数值
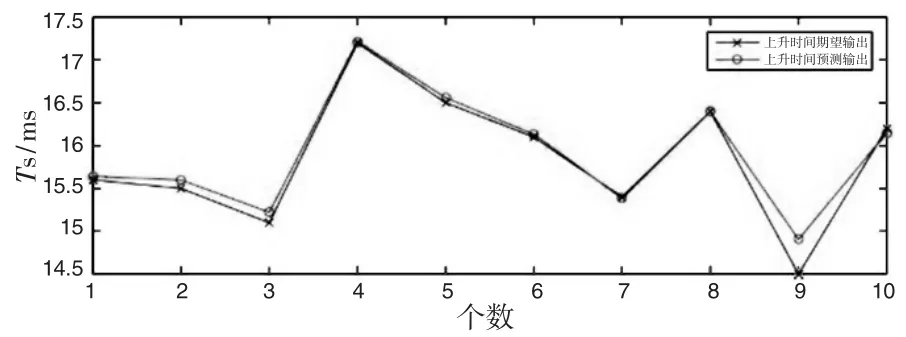
图5 上升时间变化图

图7 永磁同步电机转速仿真曲线
图中实线和虚线分别表示BP-GA 控制器和传统PID 控制器下电机的转速仿真曲线。传统PID 控制算法下,电机超调量较高,上升时间为0.016 s。本算法中,电机超调量明显减小,上升时间为0.013s。仿真结果表明,使用BP-GA 控制算法下系统的超调量较小,电机启动后的很短时间内能很快稳定并逼近于给定转速。
6 结束语
针对永磁同步电机控制系统PI 控制器参数难整定导致控制效果不理想问题,结合BP 神经网络和遗传算法的优点,提出一种基于BP 神经网络和遗传算法的永磁同步电机系统PI 控制器参数离线整定方法。通过仿真实验说明,与传统PID 控制算法的控制性能相比,该方法能明显改善系统的控制效果,同时也验证了该方法的可行性和正确性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
当代旅游(2016年10期)2017-04-17
财经理论与实践(2015年2期)2015-04-16
