视差梯度对da Vinci立体视的影响
2020-12-23 05:28:34谢莺和钰吴诗怡李睿洪贤哲周信宏
中南民族大学学报(自然科学版) 2020年6期
谢莺,和钰,吴诗怡,李睿,洪贤哲,周信宏
( 1 中南民族大学 生物医学工程学院,认知科学国家民委重点实验室,武汉 430074;2中南民族大学 生物医学工程学院,武汉 430074)
长期以来,立体视觉研究主要关注双眼性视差在深度知觉中的作用[1,2];而将那些在对侧眼中所谓没有对应的非配对区视为噪声[3-5],认为它们是视觉算法的障碍.近年来,越来越多的研究者开始认识到,观察场景中的单眼性区域(半遮挡区)在深度知觉中也发挥着重要作用[6,7].人们发现,单眼性特征可以揭示深度的不连续性,并能对深度进行定位[6, 8-10].1990年,NAKAYAMA和SHIMOJO首次将对单眼性区域产生立体深度的现象命名为da Vinci立体视[11],将术语da Vinci立体视用于泛指深度在单眼性遮挡基础上知觉而不涉及视差的任何现象.
与讲求双眼中相对应特征匹配的视差理论相对立,da Vinci遮挡理论认为,单眼性特征在对侧眼中没有匹配,当然也就没有视差,它们的深度是根据遮挡几何学重构出来的[11-13].基于不透明物体的遮挡几何学原理,NAKAYAMA等人提出了深度约束区以及最小深度约束等概念,并将da Vinci构型划分为有效(单眼性特征位于双眼性表面颞侧)和无效(单眼性特征位于双眼性表面鼻侧)两类[11].采用条棒作为单眼性元素,NAKAYAMA和SHIMOJO发现,在一定的范围内,放置在有效遮挡侧的条棒,随着它与双眼性矩形表面的距离增加,条棒的感知深度也定量地增加;而放置在无效遮挡侧的条棒,无论它离双眼性矩形表面的距离如何变化,却始终处于与双眼性表面相同的深度.这些结果符合遮挡理论的预期,也与NAKAYAMA和SHIMOJO关于生态学有效和无效遮挡的划分相一致,支持了遮挡理论.
然而,这一论断及结果的普遍性,随后受到了挑战.譬如,HAKKINEN和NYMAN发现,在非常类似于NAKAYAMA和SHIMOJO的“有效”和“无效”构型之间,并未发现深度知觉方面的差异[14].此外,GILLAM、COOK和BLACKBURN质疑,在NAKAYAMA和SHIMOJO采用的da Vinci构型中的单眼性条棒具有与双眼性矩形类似的垂直轮廓,因此其刺激构型中的定量深度可能起自于类似Panum极限情况的双重融合而不是遮挡[15].为了证明该观点,GILLAM等设计采用了两种单眼性元素——一种是能够与矩形边缘融合的直线,另一种是不能融合的圆盘.如果单眼性元素的深度确实是基于遮挡几何学恢复的,则只要位于有效侧,直线和圆盘应该都能够观察到定量深度(从生态学分析,被遮挡物的形状应该是无关紧要的);相反,如果深度是基于融合产生的,则具有不同融合特性的直线和圆盘的知觉深度可能会存在差异.GILLAM等发现,直线不论位于有效还是无效侧,均产生了定量深度;相反,圆盘不论位于有效还是无效侧,却均未能产生定量深度.因此他们得出结论,在NAKAYAMA和SHIMOJO采用的条棒da Vinci刺激构型中的定量深度简单地是类似Panum极限情况的双重匹配的一个实例,而非起源于遮挡.
然而,尽管GILLAM等认为NAKAYAMA和SHIMOJO的条棒刺激构型中的定量深度不是起源于遮挡,但他们并不否认da Vinci立体视的存在.COOK和GILLAM设计了一种背景侵入型刺激构型,该构型中的双眼性表面是一个“8”形状的图形,具有弯曲的边界,而背景侵入部分的边界是垂直的.COOK和GILLAM之所以设计这样一种构型,一个重要的考虑是使得侵入的垂直边缘与图形的被删除部分的边界不一样.这样的话,如果两眼中相应边界融合,应该产生一个可清楚识别的复杂的3D形状.然而COOK和GILLAM发现,虽然侵入面相对于双眼性表面产生了定量深度,但并没有观察到双眼性融合所预期的3-D曲面效应.因此COOK和GILLAM认为,该构型下的深度知觉依赖于遮挡几何学,是一种真正起源于da Vinci立体视加工的深度[16].
众所周知,除了视差,立体融合还受到视差梯度的限制[17-19].早期的研究发现[20-22],在先前有关Wheatstone-Panum极限情况融合方式的研究中,正是由于忽略视差梯度的影响,导致不同的研究者根据相同的研究思路却得出了截然相反的结论[23-26].分析COOK和GILLAM的侵入型da Vinci刺激构型可以发现,其双眼面其实是由两个圆盘叠加组合而成.从COOK和GILLAM前面的研究已知[15],具有较大视差梯度的圆盘是难以与垂直轮廓发生融合的.这无疑是导致COOK和GILLAM的观察者没有观察到3-D曲面的原因.
本研究打算对COOK和GILLAM的刺激构型进行拉伸,减少构型的视差梯度,调研在这种情形下,能否观察到深度曲面效应.如果该构型的知觉深度真的是起源于遮挡,则在垂直方向上拉伸构型对实验结果应该不会有影响;相反,如果该构型的知觉深度是来自于融合,则减少视差梯度应该会导致更容易观察到深度曲面效应.
1 实验
1.1 实验刺激
本实验采用的刺激构型在COOK和GILLAM等采用的侵入构型基础上进行构建和扩展(如图1所示).在类似于他们的原始侵入构型(见图1(a))中,一个实心的封闭图形呈现给两只眼;在一只眼中,背景从右边侵入到图形内部删除部分图形.通过改变看见侵入的眼,分别构建鼻侧和颞侧侵入构型.侵入角度有4种,分别对应于9、12、15、18像素的侵入宽度.通过将原始侵入构型(其视差梯度记为G1)进行垂直拉伸,使其高度变为原来的2倍和3倍,从而构建视差梯度依次减小的G2(图1(b))和G3构型(图1(c)).对构型进行垂直方向的拉伸不会改变构型中的遮挡关系.如果该构型中的深度是在遮挡几何学的基础上产生的,观察者应该观察到同样的深度知觉结果.

图1 实验采用的侵入构型示例Fig.1 Examples of the intrusion configuration used in the experiment
1.2 参与者
共6名,均为中南民族大学本科生,视力或矫正视力正常.在实验前,均通过观察颜少明数字化立体视觉检查图确定立体视正常.
1.3 实验装置和程序
实验刺激图形由Window NT 图形工作站产生,呈现在三维液晶显示器上(SD2320MW,美制).显示器分辨率为1920×1200,刷新率为75 Hz.实验时参与者需戴上正交偏振滤光镜获取相应的分视信号,即左眼只看到下显示器、右眼只看到上显示器的图像.观察距离为50 cm.参与者在参加实验前进行少量深度观察练习,以确定他们明白指导语.与COOK和GILLAM一样,要求参与者通过双眼性探针对目标的上、中、下3个部位进行深度测量.其中,上和下部探针的位置位于侵入面的顶部和底部的水平,中部探针的位置位于图形的中部.参与者可通过键盘左右键和上下键改变探针的位置,使其与知觉到的目标边缘的相应位置处于相同的深度.在每次设置之前,探针会向前或向后移动任意数量的深度.向前和向后的调整进行了平衡.探针设置比图形更远的记为负,比图形更近的记为正.对于每一侵入角,每个参与者需进行3次深度测量.
2 实验结果
在前期的调研中发现,对于视差梯度最大的G1构型,观察者最初报告的往往是一个平坦的矩形目标,但对于视差梯度较小的G3或G2构型,观察者报告的目标往往却是明显的3-D曲面.有意思的是,在观察了梯度较小的构型后再去观察梯度较大的构型时,观察者往往也能观察到3-D曲面.故本文对6名参与者的3次深度测量结果没有笼统地进行总平均,而是分别依次显示在图2(A、B、C)中.
从图2的实验结果可以看出,所有参与者对鼻部和颞部侵入的反应均表现出明显差异.对于颞侧侵入,所有参与者知觉到目标出现在图像的前面,这在深度设置上体现为上、下探针的设置结果都是正的;并且随着侵入角度增大,知觉到的深度是增加的.他们将显示描述为一个前景目标,部分遮挡了一个8字形的背景图形.对于鼻侧侵入,6名参与者中有4人(CP、WX、HY、YX)知觉到目标出现在图像的后面,这在深度设置上体现为上、下探针的设置结果是负的.同样,随着侵入角度增大,知觉到的深度是增加的.他们将显示描述为透过一个数字8形状的孔看到位于后面的一个目标.另有2名参与者(XZ、MY)在第1次进行深度测量时对鼻侧侵入没有观察到深度.他们报告侵入物看起来似乎与图形8在同一个平面上,反映为他们的上、下探针深度设置接近于零.但经过提示,在后来的第2次和第3次实验中,参与者XZ在鼻侧侵入条件下也观察到了定量深度,表现为随着侵入角度增大,上、下探针指示的深度也是增加的(第2次不太准确,第3次变得比较精确). 参与者MY对鼻侧侵入始终没有观察到深度(深度探针为零).
本研究最关心的是参与者所观察到的目标表面的形状,这可以从中部探针的设置得到反映.如果中部探针的深度与上、下探针的深度基本一致,表明参与者观察到的目标是一个平坦矩形;相反,如果中部探针的深度与上、下部探针的深度不一致,则表明参与者观察到的是一个3-D曲面.
从图2可以看到,在进行第1次深度测量时,对于视差梯度最大的G1构型,确实有较多的参与者(譬如WX、HY、MY、YX)观察到目标是平坦矩形,但不同参与者的效应并不完全一致(见图2A):参与者CP对鼻侧侵入观察到的是一个中间向外凸出的3-D曲面(中部探针的深度大于上、下探针的深度),对颞侧侵入观察到的是一个中间向内凹陷的3-D曲面(中部探针的深度小于上、下探针的深度);参与者WX对鼻侧和颞侧侵入观察到的均是平坦矩形;参与者HY只对颞侧侵入观察到平坦矩形,对鼻侧侵入观察到的是中间向外凸出的3-D曲面;而参与者YX对颞侧侵入观察到的是中间向内凹陷的3-D曲面,对鼻侧侵入大部分观察到的是平坦矩形,但对具有最小侵入角的鼻侧侵入构型观察到的却是明显的3-D曲面.虽然参与者XZ和MY对鼻侧侵入在进行第1次深度测量时均没有观察到深度,但对颞侧侵入XZ观察到的是3-D曲面,而MY观察到的是平坦矩形.对于视差梯度较小的G2构型,除了XZ和MY对鼻侧侵入观察不到深度,MY对颞侧侵入、YX对两个较大鼻侧侵入观察到平坦矩形外,其他参与者无论对颞侧侵入还是鼻侧侵入观察到的都是明显的3-D曲面;而对于视差梯度最小的G3构型,除了XZ和MY对鼻侧侵入没有观察到深度,所有参与者,包括MY对颞侧侵入,都观察到了曲面效应.
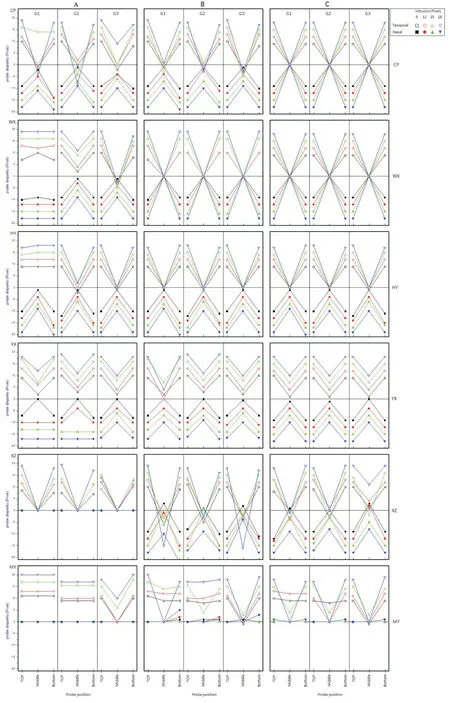
图2 6名观察者(CP、WX、HY、YX、XZ、MY)3次深度测量的实验结果Fig.2 Experimental results of depth measurements of six participants(CP、WX、HY、YX、XZ、MY)
在第2次深度测量中,越来越多的参与者观察到了深度曲面效应(见图2B).从实验结果可以看到,除了MY对鼻侧侵入没有观察到深度,所有参与者,包括MY对部分颞侧侵入,都观察到了曲面效应.即使是对于视差梯度最大的G1构型,那些起初对两侧或一侧侵入观察到平坦矩形的观察者(WX、HY、YX),也转而观察到了3D曲面,表现出了非常明显的知觉迁移效应.这与前期的调研结果相吻合.参与者HY和YX反映平坦矩形和3D曲面两种情形都可以知觉到. 在第3次深度测量中(结果见图2C),除了MY(她对鼻侧侵入依然没有观察到深度),其他参与者对具有不同视差梯度的侵入构型,不管是鼻侧还是颞侧,均观察到了明显的深度曲面效应,且表现为深度设置越来越精确.
3 分析和讨论
根据COOK和GILLAM的设计,在侵入构型中,一只眼睛看到的侵入体的垂直边缘与另一只眼睛看到的图形8的边缘的融合应该产生一个容易识别的复杂三维表面.然而他们的实验参与者观察到的全部都是平坦的矩形,而没有人观察到3-D曲面.因此他们认为,这一构型下的深度不可能用融合性立体视来解释,而是起源于NAKAYAMA和SHIMOJO提出的da Vinci立体视.
本研究通过改变侵入构型的视差梯度,发现随着视差梯度减小,参与者观察到的确实是具有空间深度效应的曲面,提示侵入构型的深度还是由融合性立体视产生.如果该构型中的深度是在遮挡几何学的基础上产生的,对构型进行垂直方向的拉伸不应该对观察到的知觉结果产生影响.
值得注意的是,即使对于视差梯度最大的G1构型,本研究的部分观察者一开始知觉到的就是有复杂3D形状的曲面,而不像COOK和GILLAM的观察者一样全部知觉到的都是平坦的矩形.该结果的差异,一方面是由于观察者之间本身存在差异,另一方面应归因于两项研究中采用的刺激构型的差异.在COOK和GILLAM的研究中,采用的是视差梯度最大的G1侵入构型.从本研究的实验结果可以看出,对于G1构型在最初观察到平坦矩形的概率确实是比较大的.而本研究采用了3种具有不同视差梯度大小的侵入构型.从研究结果可以发现,对于视差梯度最小的G3侵入构型,观察者毫无例外观察到的都是具有深度差异的复杂3-D曲面.由于在本研究中,不同梯度大小的侵入构型随机混合出现,并且被试的作业之间存在明显的知觉迁移效应,因此即使是对G1构型,也有很多观察者观察到了3-D曲面.这进一步证明,侵入构型的深度是基于融合性立体视产生的.
与COOK和GILLAM的研究结果类似,本研究中最初也有两名参与者在鼻侧侵入条件下不能观察到深度.但经过提示,参与者XZ克服了这一困难,在随后的两次深度测量中都观察到了定量深度.但另一名参与者MY与COOK和GILLAM的研究中的观察者一样,虽经多种努力却始终无法在鼻侧侵入条件下观察到深度.鼻部侵入条件的知觉结果涉及到将8字形黑色区域视为一个孔,透过这个数字8形状的孔看到位于后面的目标.这些不能观察到深度的参与者的困难提示了知觉经验的强大影响,但参与者XZ从最初不能到后来可以看到深度的成功经验也表明这一困难并非无法克服.
猜你喜欢
小型微型计算机系统(2022年1期)2022-01-21 02:55:06
广东医科大学学报(2020年6期)2020-02-06 06:00:56
医药前沿(2019年21期)2019-08-23 01:29:58
医学理论与实践(2019年17期)2019-02-25 01:27:01
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30 00:57:46
现代计算机(2016年3期)2016-09-23 05:52:13
浙江中西医结合杂志(2016年12期)2016-08-07 05:58:29
西部广播电视(2015年5期)2016-01-16 03:45:06
河北医药(2011年18期)2011-04-10 06:48:43
中国医药导报(2010年32期)2010-09-13 08:52:06