尾筒封闭的柱式灯浮标稳定性仿真与试验分析
2020-12-23 11:37:40张永辉交通运输部南海航海保障中心广州航标处
珠江水运 2020年22期
张永辉 交通运输部南海航海保障中心广州航标处
由于钢质柱式灯浮标的结构对称制造方便,成本低,在我国的诸港口航道上已作为常规助航设施使用。本文分别应用仿真方法和试验方法对尾筒底部封闭的柱式灯浮标的稳定性问题进行分析,从而为尾筒底部封闭的柱式灯浮标稳定性分析提供一个有效、可靠的方法。
1.仿真分析
本研究采用SESAM软件中的GeniE板块、HydroD板块、DeepC板块、Xtract 板块等独立板块。将GeniE 板块建好的模型导入到HydroD板块中,设定海洋环境,如波浪高度,波浪周期,风速,波浪入射角度等,然后分别使用Wadam和Wasim Wizard进行稳定性分析和频域分析。使用Postresp板块对分析结果进行后处理,使仿真分析的结果以图表的形式显示出来。
1.1 浮标有限元模型的建立
考虑到浮标尾筒和浮体结构相对简单对称,故在建立浮标有限元模型的时候对灯架利用等效的思想对灯架进行结构简化,考虑到计算精度以及计算速度的问题,选取0.1m的网格对浮标进行离散化,并添加浮标的材料属性以及设置浮标的势表面等参数,求解生成得到浮标的有限元模型。
1.2 浮标动力学模型的建立
在线性理论中,流体运动的速度势是入射波速度势、绕射速度势以及辐射速度势之和的线性叠加,物体在波浪的作用下的浮标的运动问题是一个综合的问题。为了更好的描述浮标在波浪下的运动,本文将浮标简化成具有六个自由度的刚体运动如图1所示,继而浮标的运动将用浮标质心的运动代替,从而描述质心处六个自由度的位移列阵假设为U=[u1u2u3u4u5u6]T,其中u1、u2和u3分别表示为浮标的纵荡、横荡和垂荡;其中u4、u5和u6分别表示为浮标的横摇、纵摇和垂摇的角度,此处将只考虑浮标的横摇运动。利用刚体动力学的一般理论,在浮标微幅运动的限制,考虑波浪的扰动力,因物体摇荡偏离平衡位置而产生的恢复力矩,流体的阻尼力以及系泊系统而产生的外力等作用下的浮标的运动情况,继而根据Lagrange方程建立浮标在外激励下的动力学方程为

式中:I为浮标横摇的惯性矩;θ与为浮标的横摇角位移以及横摇的角速度;为等效波浪的扰动力力矩,可根据Morison公式确定;为因物体摇荡偏离平衡位置而产生的等效恢复力矩,可根据文献确定;为系泊系统而产生的等效外力力矩,可根据数学推导以及文献张力计算公式可知;为等效风载的广义力力矩,可根据文献确定。

图1 尾筒封闭的浮标力学模型
1.3 浮标稳定性数值仿真计算
浮标在外力干扰下发生侧倾,当侧倾角过大,恢复力矩不足以维持浮标的稳定性时,浮标会失去正常的工作状态,甚至会完全倾覆。根据文献[4]可知,此时就不能忽略侧倾角对恢复力矩大小的影响,所以,研究浮标的横摇运动响应,得出其侧倾角值,对于准确、可靠地判断浮标稳定性是非常重要的。根据前面建立的浮标动力学方程及力学模型,利用SESAM/HydroD板块对浮标进行频域下稳定性分析。得到尾筒封闭的柱式灯浮标在6级风环境下仿真得到的有关浮标稳定性的相关曲线图,如图2为浮标的恢复力矩和倾覆力矩曲线图,图3为浮标的频域稳定性分析结果图。
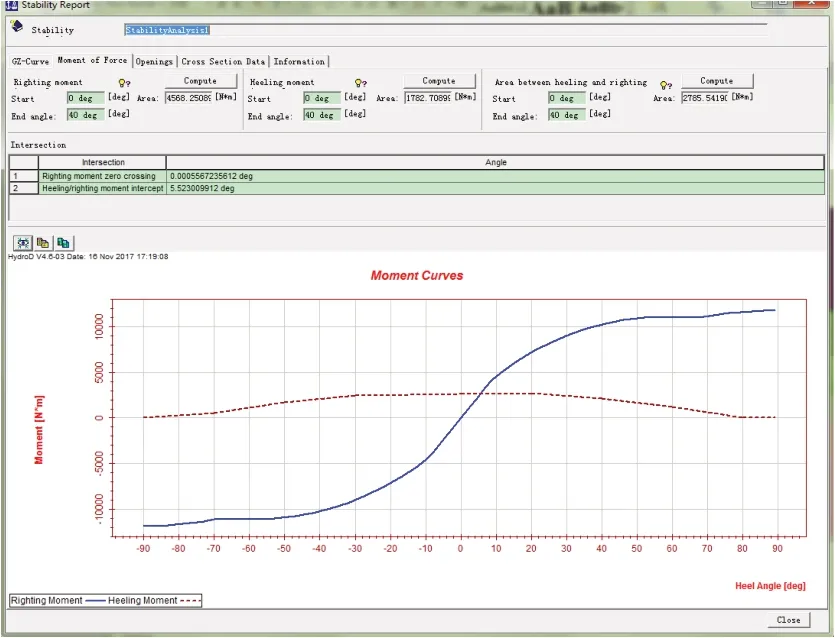
图2 浮标恢复力矩(实线)和倾覆力矩(虚线)曲线图
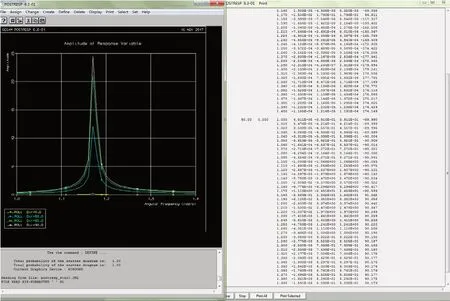
图3 浮标RAO曲线图
根据以上方法,同样可以得到尾筒封闭的柱式灯浮标在不同风力环境下的最大横摇角,如在二、三、四、五和六级风下最大摇摆角分别是0.7°、1.7°、3.2°、5.8°和9.3°。
2.试验分析
2.1 测试对象及测试系统
这里以广州航标处高栏港16号灯浮标所在海域的编号为GZ-C-064-15的尾筒封闭的柱式灯浮标为测试对象。试验仪器包括:动态倾角传感器(VG200垂直陀螺仪)、无线发射和无线接收装置一套、蓄电池(12V)、相关软件一套、胶带、232数据转换接头以及笔记本电脑等。
2.2 测试步骤
(1)在指定工作海域选择试验浮标并将动态倾角传感器安装固定在试验浮标轴线位置,并保持传感器安装面与水平面平行;(2)将传感器分别与蓄电池、无线发射装置相互依次连接,且做好传感器以及蓄电池的防水措施;(3)将电脑与无线信号接收装置连接,同时将无线接收装置和蓄电池连接确保正常供电;(4)打开电脑,运行传感器配套倾角测量软件,进行初始化设置,确保信号连接稳定,若无线发射和无线接收装置的信号灯呈现紫色闪烁,说明信号正常;(5)数据记录间隔根据实际情况设定为8,根据软件换算得出记录每组数据所需时间为200+200×8=1800ms;(6)点击软件“开始”按键,倾角测量软件开始工作并记录浮标的摇摆倾角。
2.3 结果分析
测试时浮标所处位置的实时最大风速约为四级风的测试工况。根据现场所测得的数据,利用MATLAB得到该浮标的摇摆角试验时域曲线,包括浮标电池箱上的倾角传感器绕自身坐标系X和Y轴旋转的摇摆角试验数据时域曲线。
通过仿真计算得到柱式灯浮标在四级风速环境下的最大横摇角为3.2°,通过试验所测得的有关GZ-C-064-15灯浮标摇摆角的数据中,有98.3%的数据都是小于3.2°的,这说明试验所得到的结果与仿真分析结果是基本吻合的,从而验证了仿真分析结果的可靠性和有效性。
3.结束语
本文首先应用SESAM有限元软件对尾筒底部封闭的柱式灯浮标的稳定性进行了仿真分析,然后以广州航标处高栏港区海域所管辖的编号为GZ-C-064-15的尾筒封闭的柱式灯浮标为测试对象,对其稳定性进行了试验分析,再通过对仿真分析结果与试验分析结果进行对比分析,验证了仿真分析结果的正确性。研究表明:基于SESAM有限元软件对柱式灯浮标的稳定性进行仿真分析是可靠的,从而为柱式灯浮标的稳定性分析提供了一个有效的方法。这为分析、优化柱式灯浮标结构提供了一个有效的研究方法。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
科学大众(2021年19期)2021-10-14 08:33:10
中国临床医学影像杂志(2021年6期)2021-08-14 02:21:46
北京汽车(2021年3期)2021-07-17 08:25:42
通信电源技术(2018年5期)2018-08-23 01:16:06
中国交通信息化(2017年7期)2017-06-06 05:52:10
电测与仪表(2015年10期)2015-04-09 11:48:34